

Toute l’activité
- La dernière heure
-
Je suis en train de tester LightBurn il a l'air vraiment sympa surtout au niveau des calques c'est bien pratique, mais j'ai 2 questions : LightBurn ne tient pas compte des endstops du ACMER P1 S Pro 6w lorsque je fais un home normal pas normal ? J'ai fait un test de découpe de FDM de 3 mm et même à pleine puissance à 250mm/m j'ai essayé jusqu'à 7 passages et c'est toujours pas traversé... je loupe un truc ou pas ? Merci d'avance pour vos conseils
- Aujourd’hui
-
Yep même 3 (ils sont durs en affaire xtool xD) C'est le S1 10W (tout pitit tout mignon)
-
merci pompe verte pour tous ca par contre je n arrive pas a ouvrir pour l extrudeur oul ah oui quand même il y a pas de modification a faire .est ce que cela irai https://fr.aliexpress.com/item/1005005424460824.html et pour les pièces a imprimer tu as encore tes fichiers ou même si tu peux les imprimer je te paye bien sur il y a aucun soucis
-
 Cupidon3D a rejoint la communauté
Cupidon3D a rejoint la communauté -
 Salut, Est-ce que tu as essayé de faire ce test avec le moteur d'origine?
Salut, Est-ce que tu as essayé de faire ce test avec le moteur d'origine? -
Pour un prix serré, tu pourrais partir sur ça: plaque chariot X Ender 3 : 2,96 euros (-> tu récupères les vis et galets en t'assurant que tes vis sont des M5) hotend (double alimentation): 5,07 euros extrudeur : 5,31 euros x 2 Pour le reste, comme l'a dit medmed, tu pourras l'imprimer avec ta Ender 5 pro
-
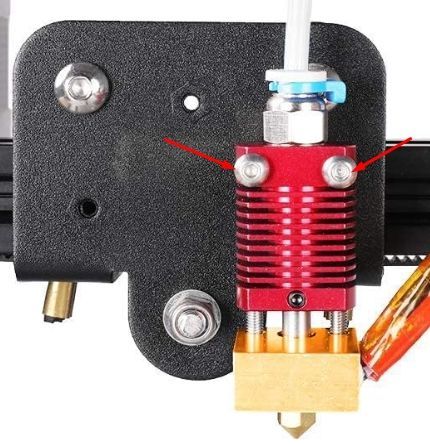
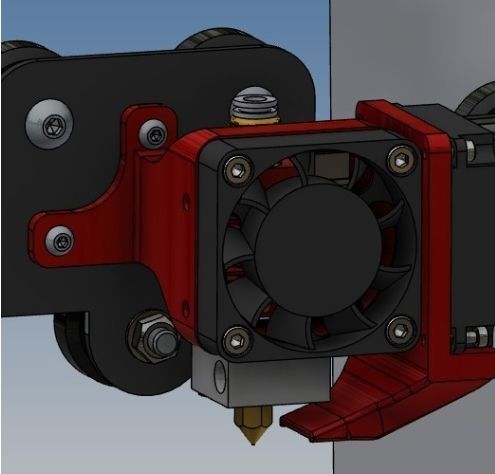
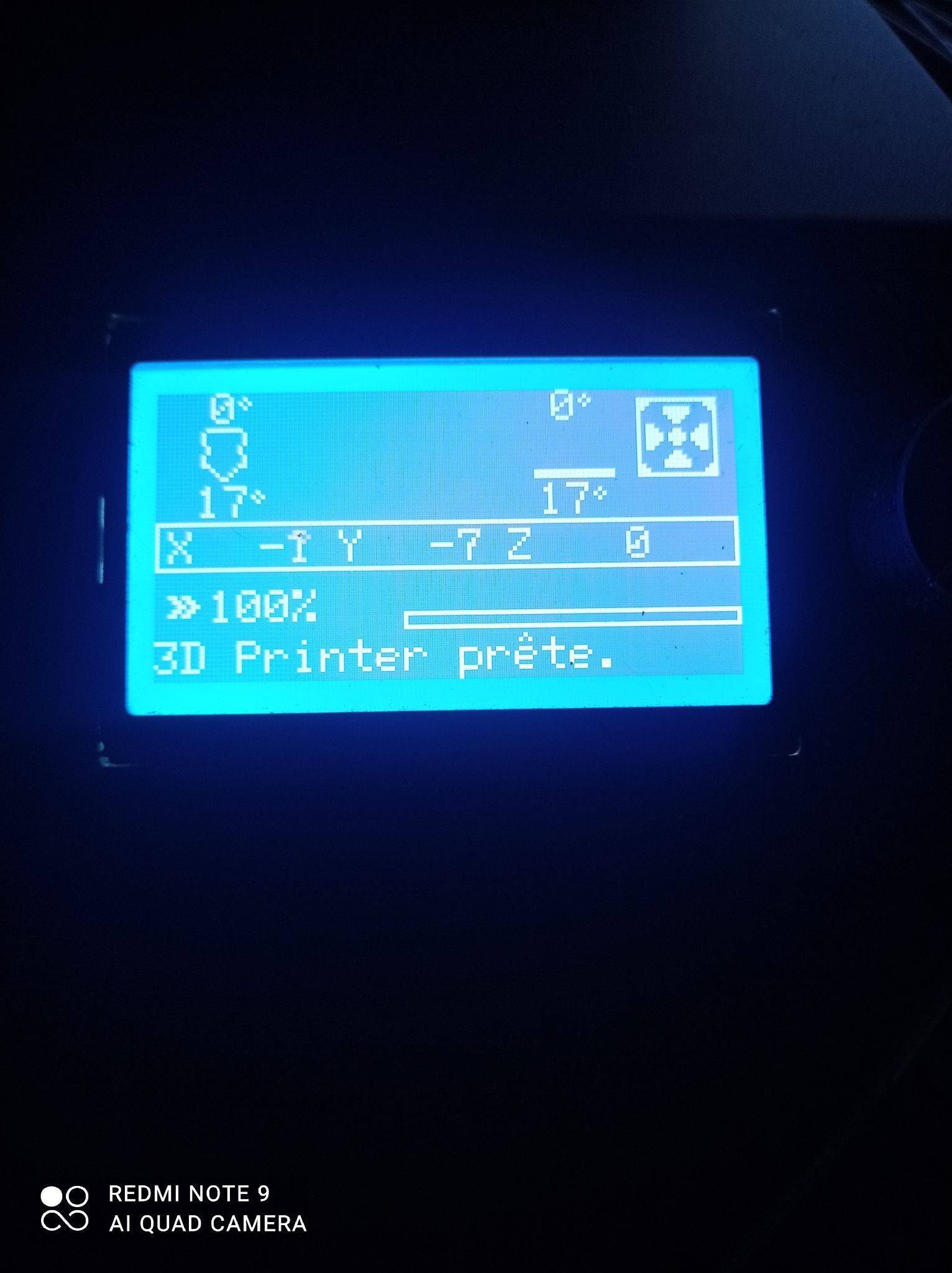
Pour l'écran c'est normal. Il garde en position ce qu'il avait avant l'extinction. Quand tu allumes l'imprimante, le système n'a aucune idée de la position de la tête d'impression parce que tu as pu très bien bouger manuellement la tête en XYZ. Pour cette raison, le système à l'allumage, et dès que tu voudras déplacer la buse ou le plateau, te demandera toujours de faire un home XYZ pour savoir ou se trouve exactement la buse et le plateau. Pour l'extrudeur, ce n'est pas le bon. Celui-là, a un simple entrainement. Il faut prendre celui à double entrainement. Je t'avais mis le lien plus haut dans mon message. C'est celui-là. On peut facilement se tromper entre les deux Pour la hotend , c'est le bon. mais comme l'ai dit. Le problème, c'est le support. Le support de ma geeetech démonté. Vérifie, mais tu dois avoir le même sur ton imprimante. Regarde la différence avec la fixation de la hotend ender 3. Sur la Geeetech , tu as du vide à l'emplacement des fixations. Alors, soit tu imprimes un support (ce qui n'est pas simple), soit tu achètes un kit ender 3 complet Hotend + support. Il faut aussi prendre la carter qui permet de fixer les ventilos, ou l'imprimer, genre... Quand, je suis passé en DirectDrive avec un bigtreetech H2 V2, j'ai tout imprimé, y compris le support. Ça m'a pris pas mal d'heures à cogiter, dessiner, imprimer. C'est pour ça que je sais que ce n'est pas simple à réaliser.

-
Tu vas en faire une vidéo ? Et au fait c’est quelle graveur Xtool ?
-

Probleme dextrusion Artillery sidewinder x1
Alain D. en réponse au topic de Gomez dans Entraide : Questions/Réponses sur l'impression 3D
Ta hauteur de buse par rapport au plateau est bonne ? -

Choix Première imprimante 3D
Rafale01 en réponse au topic de ptitom1381 dans Bien choisir son imprimante 3D
Première chose je suis plutôt novice en impression 3D et je n’ai eu qu’une Ender 3 v2 entre mes mains. Je partage l’avis de MrMagounet, la A1 et A1 mini sont des imprimantes indéniablement plus performantes que la Ender3 v3 Ke néanmoins de nombreuses personnes veulent se lancer dans l’impression 3D mais après avoir dépensé plus de 400 € dans une imprimante, se lasse. Car oui parfois on veut découvrir mais on est finalement déçu. Donc ci tu n’est pas sur de toi, je te conseille plutôt la Ender 3 v3 KE qui t’offriras une bonne qualité d’impression une bonne vitesse et un auto-leveling ainsi que d’autre gadgets (je précise les A1 les on aussi) ainsi si tu aime l’impression tu gardera ta K3 ou tu la revendra et tu achètera une meilleure machine et si finalement ça ne te convient pas l’impression 3D ou ça te lasse tu aura mis + de 200€ plutôt que 400. Néanmoins si tu est sûre de toit et que tu a le budget, vas y fonce sur la A1 ou la A1 mini, le mieux serait en combo avec l’AMS light, la tu aura vraiment de quoi te fair plaisir. J’espère que ma réponse t’aura aider, Et à bientôt. -
Je fais tout la chaud jamais eu de soucis.
-

Probleme dextrusion Artillery sidewinder x1
Gomez en réponse au topic de Gomez dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour Alain , comment sa hauteur de buse? mais oui plateau ok -
Oh, quelle coïncidence, et quelle surprise : la dernière version de Bambu Studio propose une fonction (celle des "PIN" pour la sécurité) disponible pour toutes les imprimantes SAUF les X1C - alors p-e que ce sera ajouté plus tard ce coup-ci, mais çà semble bien montrer que la X1C n'est plus une "key player" ... Added binding method for pin code We have added a non LAN mode binding method, which allows for easy binding of printers on the Studio side by inputting the Pin Code generated on the printer side. - P series added support in version 01.06.00.00 - A1 mini is supported starting from version 01.03.00.00 - A1 is supported starting from version 01.03.00.00 - X series is currently not supported
-
1.9.0 beta 4 cette fois : https://github.com/bambulab/BambuStudio/releases - Gestion de fermes d'imprimantes ... (un cas marginal pour beaucoup d'utilisateurs, mais sans doute intéressant pour ceux concernés + p-e un moyen de "lutter" comme l'écran Big Tree Tech qui permet aussi cette fonctionnalité) - Une gestion de la sécurité par PIN ... pour toutes les imprimantes, sauf les X1C ! - Des .obj avec colorisations intégrées dans le fichier ... si çà pouvait éviter de devoir s'échanger des .m3f, ce serait pas mal en effet (qui embarque bcp trop de choses niveau paramètres pour que ce soit une bonne idée d'utiliser ce format de fichier plutôt destiné aux fonctions "projet") --- Feature 1. Support Multi-device Management. We are excited to announce a new feature in our latest release: Multi-device Management. With this feature, you can now send print jobs to multiple printers simultaneously and monitor the printers' status, print history, and task queuing. When sending a job, you can also choose filament from either the external spool holder or AMS However, if you select AMS, we currently only support one AMS on each printer. You can configure the task sending procedures by setting up the batch size and interval, which reduce the risk of overloading your power supply. Heating up the hotbeds is when the printers consume the most power. By controlling the batch size and the interval between batches, you can even out the peak power consumption, therefore reducing the risk of overloading. However, please always check your power supply capability when running multiple printers. Edit printing parameters in the Send window View task details on the tab page of Multi-Device For more detailed information about this feature, please click the wiki page. https://wiki.bambulab.com/en/software/bambu-studio/multi-device-management 2. Imported .obj File with Color Function Added color imported from vertex in obj file, and color imported from mtl file function. You can use software such as Blender or Meshlab to color vertices or patches of the model. The PNG color function is currently under development. Please stay tuned. Note: Please ensure that the imported obj file does not contain non-manifold edges. After color parsing, the results may not fully correspond with other rendering software. Users can continue to manually adjust the printed colors in BambuStudio. 3. New CrossHatch Infill Pattern We developed a new infill pattern called CrossHatch. As the name suggests, it primarily fills parts with lines, while periodically altering the direction of the lines through some transition layers. It dramatically improves strength compared to line and concentric infill, while achieving high speed and silent printing in most layers. When compared to Gyroid infill, it prints 28% quicker in a test cube. When compared to Grid infill, it has a smaller grid size at the same density setting. Based on our tests, we recommend printing it with a slightly lower density setting than you normally would, such as 12%. Improvement 1. Added binding method for pin code We have added a non LAN mode binding method, which allows for easy binding of printers on the Studio side by inputting the Pin Code generated on the printer side. P series added support in version 01.06.00.00 A1 mini is supported starting from version 01.03.00.00 A1 is supported starting from version 01.03.00.00 X series is currently not supported These firmware updates will be released soon. For more information, please refer to the WIKI page https://wiki.bambulab.com/en/bambu-studio/manual/pin-code Pin Code obtained on the printer side. 2.Error code pop-up using new UI We have updated the error code prompts and added illustrations, making the error codes easier to understand. This helps users locate and identify issues more effectively. 3.Optimized PA calibration for P-series and A-series printers P series and A series printers can support saving calibration results to the printer like X series printers. The calibration results can be edited in Studio's "Manage Result", and the calibrated k value can be set for the AMS slot in device page. P series added support in version 01.06.00.00 A1 mini is supported starting from version 01.03.00.00 A1 is supported starting from version 01.03.00.00 These firmware updates will be released soon. 4. Added more fonts. This improvement is inspired by PrusaSlicer. Thanks to PrusaSlicer. 5. Added an assembly tool for creating assembly relationships between objects. Currently, face-to-face and point-to-point assemblies have been achieved. 6. Add "filament long retraction when cut" for P1P and P1S. The P series firmware that supports this feature will be released soon. 7. Some translations improvement, Russion by @AndylgTom, Turkish by @fatih5228, Korean by @bluesoul33 8. Add local levelling for A1 series
-
Probleme dextrusion Artillery sidewinder x1
Alain D. en réponse au topic de Gomez dans Entraide : Questions/Réponses sur l'impression 3D
Niveau du plateau et hauteur de buse Ok ? -

Sidewinder X4 Pro et Plus, tout ce qu'il faut savoir
MrMagounet en réponse au topic de MrMagounet dans Artillery
encore une erreur sur la chaine d'assemblage le plus gros soucis c'est cela pour moi leur unité d'assemblage est pas top car tu en as nickel mais d'autre c'est pas sa. -
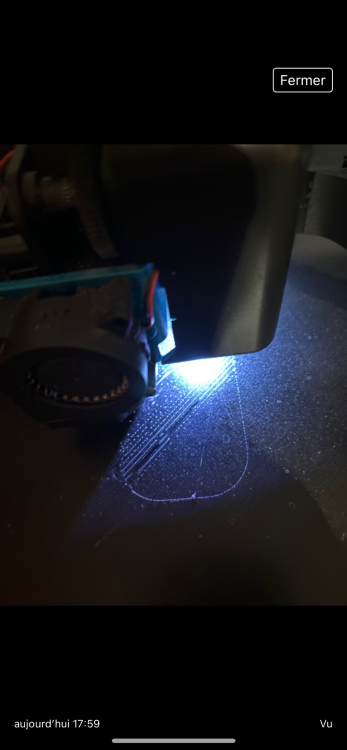
Bonjour jai acheter une sidewinder x1 mais a chaque impression cela me donne ceci: Peut importe les reglage fait. Aide svp
-
Gomez a rejoint la communauté
-
Bonjour exactement le même problème. Avez-vous trouvé une solution ?
-
bonsoir a vous deja merci pour vos message . 1 er chose quand j allume l imprimante sur mon il me mets cela est ce normal ? que mon X et Y soit a -1 et -7 et que mon Z soit a zero. pour ce qui est de changer la tète et l extrudeur est ce bien ca ou pas ? https://www.amazon.fr/Redrex-Extruder-Aluminium-Conductrice-Imprimantes/dp/B07DDGGN92/ref=sr_1_1?__mk_fr_FR=ÅMÅŽÕÑ&crid=1XV7A1UIYO8BU&dib=eyJ2IjoiMSJ9.F1ntsvoML6eJAvqwU9hDFg.dcjYqCJ4P49qjuVMjXcyiEaBTiAtZnDW7sKcjTftQ38&dib_tag=se&keywords=extrudeur+deporter&qid=1714066106&sprefix=extrudeur+deporter%2Caps%2C83&sr=8-1 https://www.amazon.fr/Creality-Officiel-Upgrade-Ender-3-Imprimante/dp/B09RXRQ5HM/ref=sr_1_5?crid=1E9M4LTMTMWEE&dib=eyJ2IjoiMSJ9.8hhDZc7LtHrbk6huacyk6i56WkaH1LPhiwmGSckkjFquC23qsiGlQKsKf4HyDb45J-_nPMgshKV4EUS1oJh2AEKpldgIALqk7_dZ94nm-U_MC_6akyYpKjtFGJWC5gw2bO4IELgN1KQ2wHUdNsooOMe1GvxeizwZ5PiuEiYd_Rph-N0sqCzWjg7dVK-UHmkX0215FFmOfsmWEXAGjvz6p-8QHBmjOhwSrwPqxW_QaYnIoEhYdFACTSbzOuDETfzeGmAMGp3qQEwn6VLNImgilBsF2WPEs2fm3v9rY1psvcI.mEE_mYwQPmEWvV9pykbIHLtQvxjPhZS33k3TgQMFJvw&dib_tag=se&keywords=hotend+ender+3&qid=1714066167&sprefix=hotend+%2Caps%2C93&sr=8-5

-
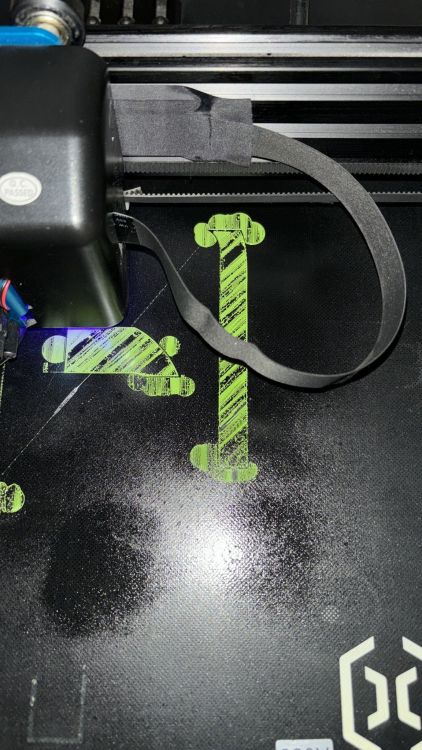
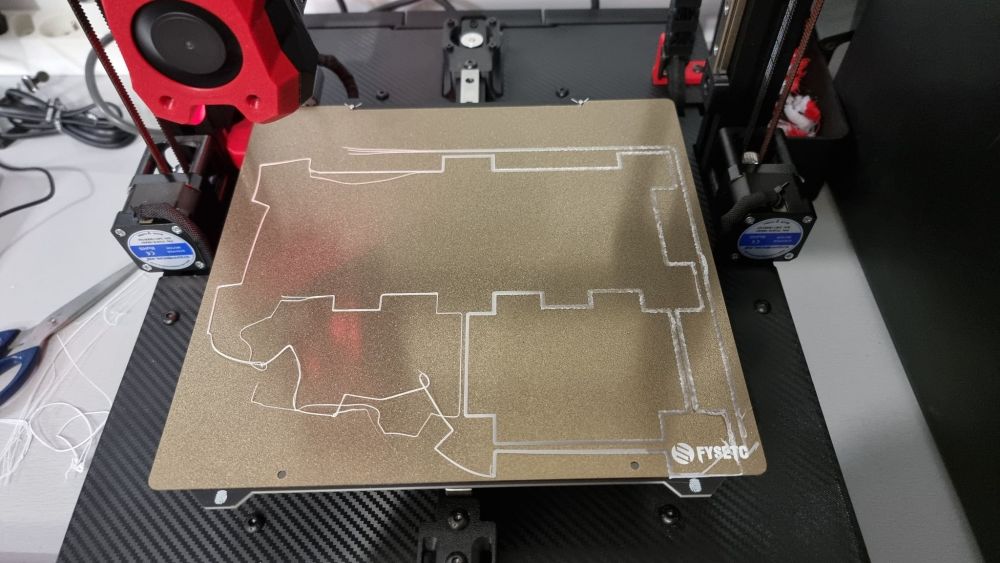
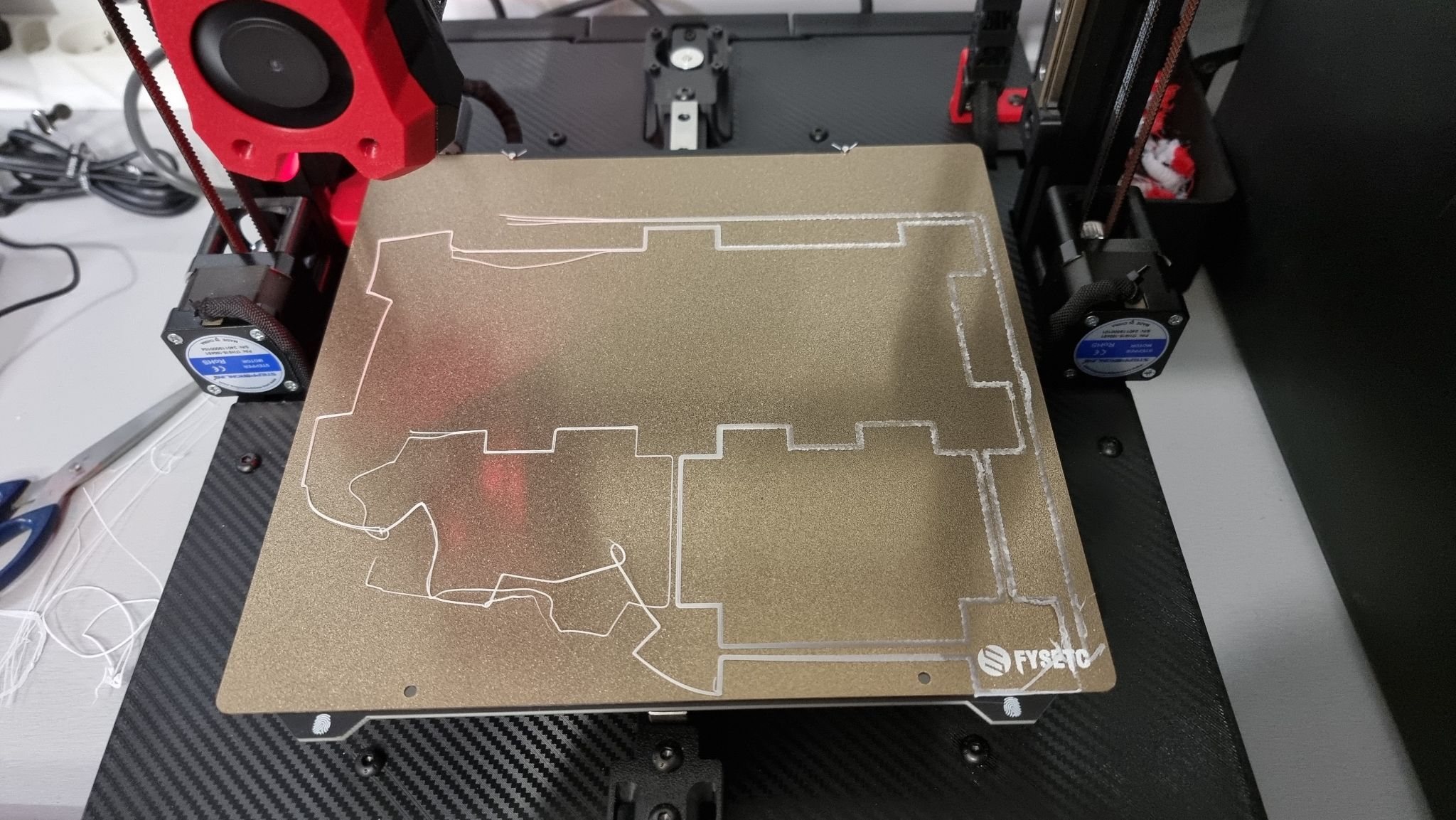
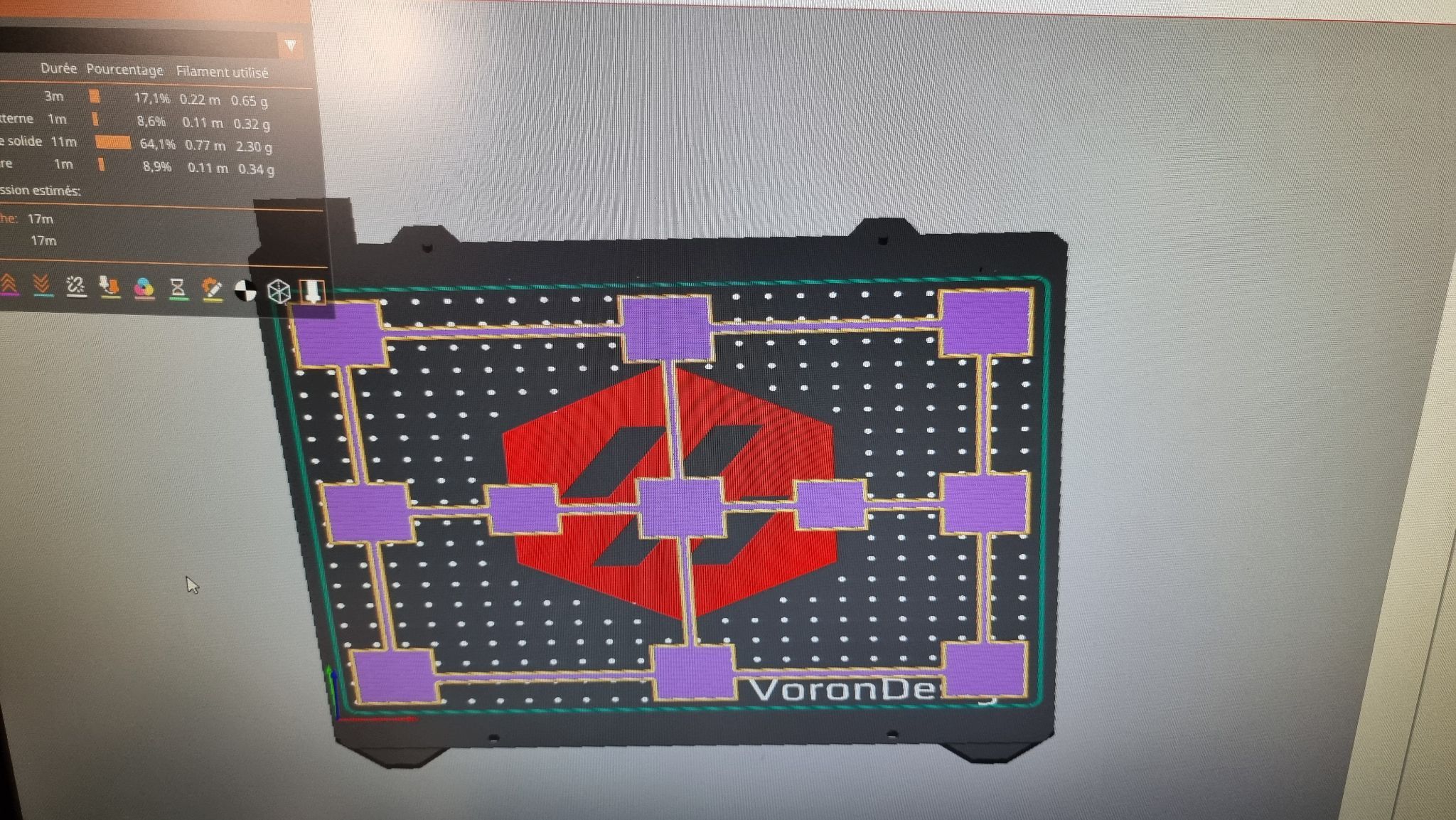
Bonsoir. J'ai un soucis de bed et je vais avoir besoin de la communauté : J'ai lancé une impression du" bed level test" de Prusa. pour tester la planéité du bed. Non seulement mon bed n'est pas plan mais l'impression est décalée vers l'avant par rapport à ce qui s'affiche dans prusaslicer. La buse imprime le raft dans le vide! Une idée de comment corriger ce soucis? Je débute en Klipper.
-

Sidewinder X4 Pro et Plus, tout ce qu'il faut savoir
Griffin Dark en réponse au topic de MrMagounet dans Artillery
Ok je te tiens au courant de la suite. j'ai contacter le SAV mais le délai de traitement est de 3 jours. J'avais un autre problème, ma SW x4 est arrivé avec 5 ressorts pour le bed j'en ai profité pour leur demander de m'en envoyer 1 pour avoir tous les mêmes. -
Tout dépend sur quel type de presse. Sur une presse manuelle, je pense que l'on peut utiliser tous métaux pour faire quelques pièces Sur une presse d'injection haute pression, je pense que le laiton ne va pas résister longtemps. Il y de très nombreux Bronze avec des caractéristiques très différentes. Il nous arrive de mettre des inserts en bronze pour des portions de moule que nous voulons refroidir rapidement et dans lesquels il est compliqué de créer un circuit de refroidissement (le bronze transmet beaucoup mieux les calories que l'acier), mais nous utilisons uniquement des bronze HR au béryllium pour avoir une bonne durée de vie. Il n'y a pas de collage sur le bronze, mais ne t’empêche de mettre un petit coup de bombe démoulante.
-
je viens de relire le fil de cette discussion mais je ne vois pas a quel moment tu parles de M119 j'ai lancé la commande et fait une capture écran , je sais pas ce que je dois faire de cette info

-
Concours sur "Makeronline" bêta (Anycubic)
PPAC en réponse au topic de PPAC dans Bons plans et crowdfunding
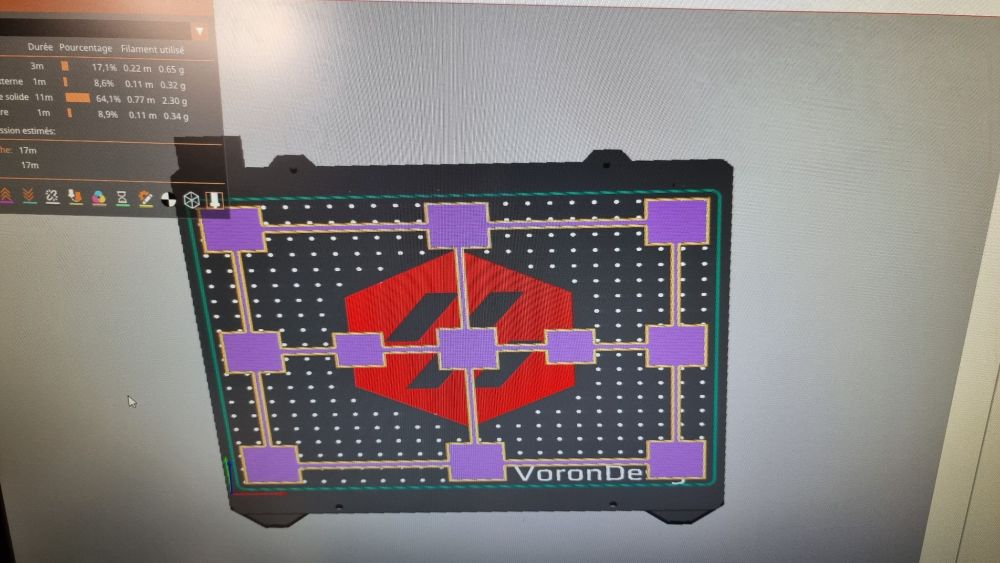
MakerOnline précise quelque points https://forum.makeronline.com/topic/Challenge Announcement Quality Standards for Submissions-279.html Il faut une certaine "Assurance qualité" du modèle et mettre des photos du print. Pour avoir "un environnement concurrentiel équitable, basé sur les mérites de leurs conceptions plutôt que sur des soumissions stratégiques" Je vais devoir partir a la recherche de personnes disposant d'une imprimante avec AMS / MMU / ... qui voudrait bien m'imprimer quelque modèles ou alors me taper un bon nombre de changement de filament dans le prochains jours Afin que je complète mes participations ( https://www.makeronline.com/en/challenge/SharePage/346ce0f0-a25a-40f8-8091-29feb939d5ac.html ) Voila pour aujourd’hui (Chute ne pas leur dire que j'ai imprimé cela avec un Ender-3 V3 )



-
Choix Première imprimante 3D
MrMagounet en réponse au topic de ptitom1381 dans Bien choisir son imprimante 3D
La A1 et A1Mini a des techno que n'ont pas la Ender3 KE, comme l'AMS oui mais surtout l'ajustement du débit auto. L'avantage des bambulab c'est l'environnement complet très maitrise c'est du plus surtout quand on début, après perso j'ai pas la KE mais j'ai les SW X4 Pro et Plus de Artillery qui sont comparable et j'arrive a quelques chose d'ultra bon même si j'ai créer des profils plus adapter sur OrcaSlicer par exemple ou ajouter des macro utile sous klipper, mais je suis pas novice c'est sur. Après Bambulab est plus carré que creality, Artillery, anycubic, elegoo et autre marque tu l'assemblage et plein d'autre aspect c'est indéniable.














-
YouTube / Les Imprimantes 3D .fr
-
Qui est en ligne 7 membres, 0 anonyme, 153 invités (Afficher la liste complète)
-
Statistiques des membres
46 316
Total des membres6 937
Maximum en ligne
-
Statistiques des forums
50,9k
Total des sujets570,8k
Total des messages -
Sujets les plus vus





-
-
-


-
Images
-
Sujets récents
-
-
Contributeurs populaires
-
Sujets actifs
-
-
Sur le blog
-
Soutenir le forum




Les liens affiliés
Certains liens affichés sur le site et le forum sont affiliés. En tant que partenaire Amazon entre autres, nous pouvons recevoir une commission mais le prix que vous payez ne change pas, il reste au plus bas.









