Classement



Contenu populaire
Contenu avec la plus haute réputation dans 16/03/2017 Dans tous les contenus
-
Bonjour, Alors voici le petit avancement du moment avec le montage et réglage des courroies X et Y selon le Guide de montage des courroies Où l'on voir également le montage final de toutes les parties Puis le montage des accessoires Partie 1avec l'arduino Et l'écran LCD Et le début du système d'extrusion Conclusion il ne me reste plus que la dernière partie de montage des accessoires avec : Le Endstop X Les ventilateurs Le Heatbreak Buse Le plateau chauffant Et bien sûr ensuite ce sera l'électronique. Si je peux je finis ça ce soir pour tester au plus tôt la bête3 points
-
Trop hâte de finir le montage de la mienne2 points
-
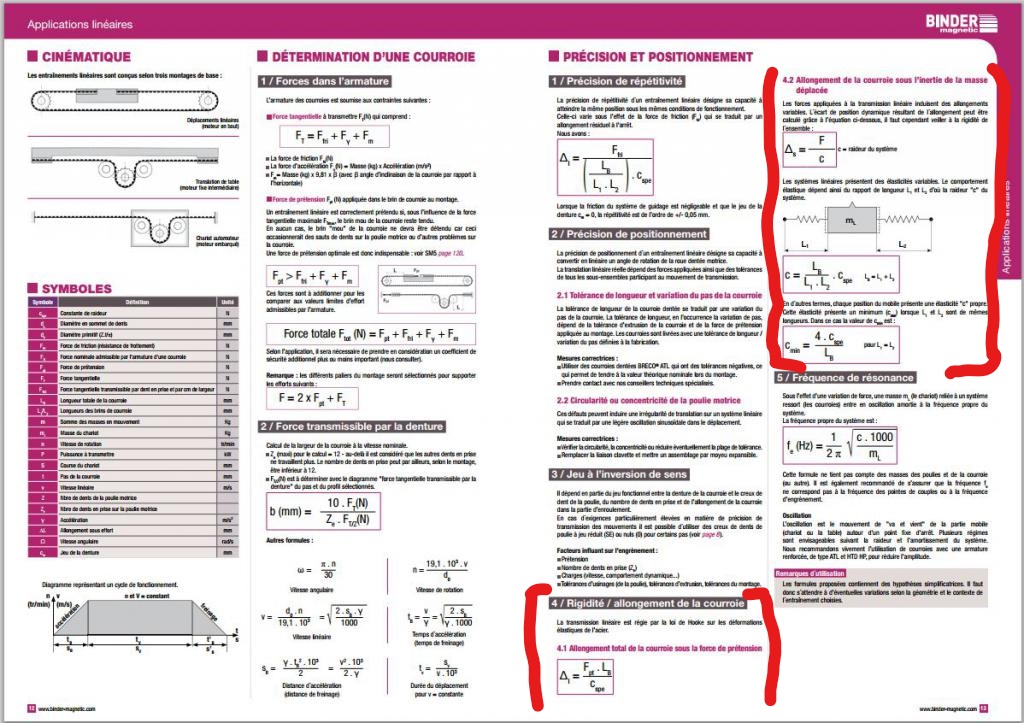
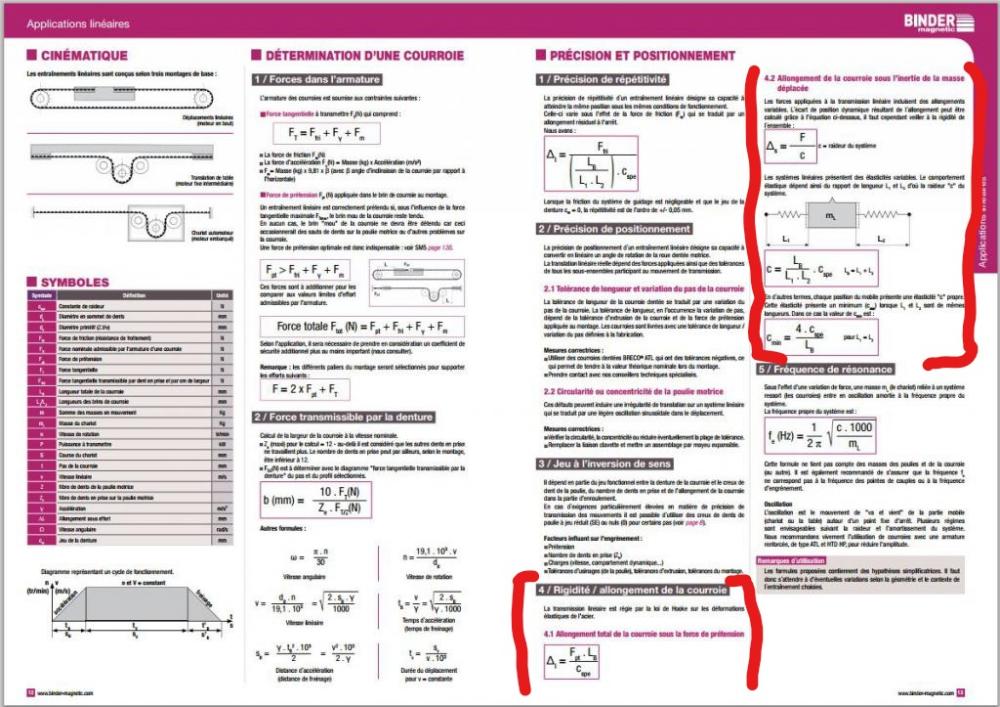
Hello Zarrt Un temps j'avais regardé ce type de question...(pour ma cnc qui dort ) De la lecture et de l'analyse (pour un bon WE je pense ^^) http://www.binder-magnetic.com/courroies-poulies-dentees-accessoires/Courroies-transmission-1207.pdf (cette page est extraite du PDF) Et https://fr.wikipedia.org/wiki/Courroie Il y a pas mal de parametres et mesures à réaliser qui entre en compte (trop pour moi ) Perso et pour l’expérience que j'en ai ... le choix de la qualité des courroies est, par contre, important. J'en ai eu des bien pourries (elles ont souvent un aspect brillant)., trop rigide entre autre, ce qui n'est pas mieux que si elles s’allongeaient, car ne faisant pas correctement le tour en n’épousant pas les poulies (liée à leurs duretés) cela provoque un effets "ressort/amortisseur" un manque de réactivité en sorte ...un peu comme un phénomène de backslash sur une transmissions à vis bi-directionnelle avec la restitution des jeux à chaque changement de direction Après les courroies sont armées, en principe, (celles que j'ai en tout cas) je pense que cela limite leur allongement . (voila j'ai encore trucidé un truc) Pour la longueur, sur les deltas elles dépassent souvent 1.5 mètres voir 2 mètres sans créer de soucis de positionnement .... à priori.... ça se saurait En général, dans nos configurations , elles ne supportent que très peu d'efforts de tractions.... je pense même que les moteurs perdront des pas avant que la courroie ne bronche ou qu'elle envoi voler le plateau ....suite à son extension (mais je peux me tromper) Ce serait interessant que les concepteurs de machine présents sur le fofo nous fassent un retours en effet (calcul ou ... méthodes empiriques) Bons calculs .... et fais nous un résumé PS; j' ai une dizaine de mètres de courroie... je vais essayer de "tirer" dessus avec un peson ... pour rire ... et avoir une mesure empirique (et à l'occaz ... hein )
-plumeau31@gmail.com-Gmail.jpg.7efa1b7a23ef806699ef7f368554e235.jpg)
 2 points
2 points -
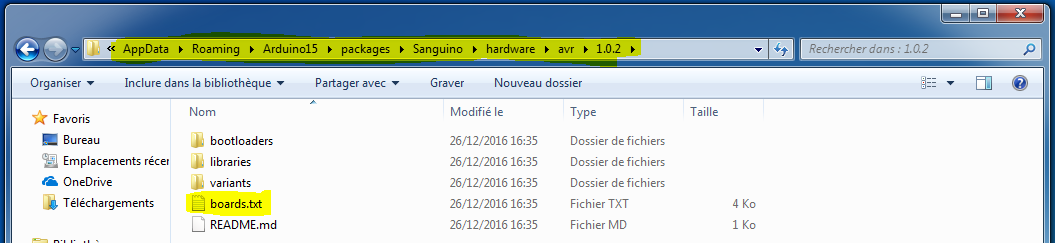
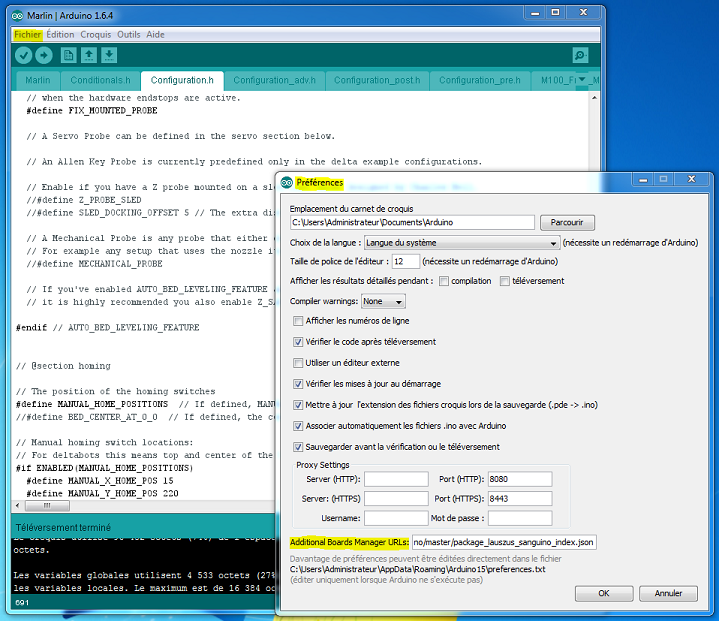
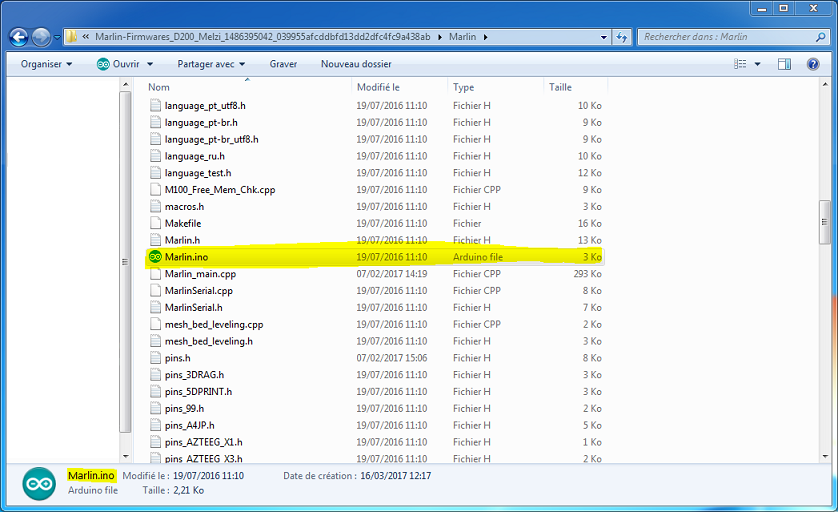
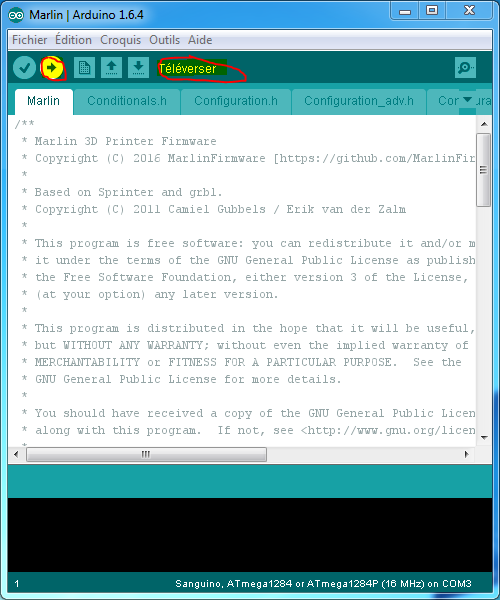
Hello, J'essaye depuis ce matin de flasher ma Melzi avec Arduino 1.6.4 et après 4-5 heure de test j'ai enfin trouvé une solution, donc un mini tuto pour les gens qui serait dans mon cas : Discovery 200 - Melzi ATmega1284 à 16 Mhz uniquement Les modifications ci dessous sont susceptibles d’endommager votre matériel, je ne suis en aucun cas responsable de la mauvaise utilisation des outils mis à disposition ou de la non compréhension des langages ci dessous, vous le faite en votre âme et conscience Je pars du principe que la procédure ci dessous fourni par Dagoma est déjà faite : Télécharger & installer Arduino 1.6.4 -> Lien Lancer Arduino et cliquez sur Fichier -> Préférences -> "Additional Boards Manager URLs" entrez le lien suivant https://raw.githubusercontent.com/Lauszus/Sanguino/master/package_lauszus_sanguino_index.json on termine en validant par "OK" Ensuite rendez vous dans "Outils" -> "Type de carte" -> "Boards Managers" Une fenêtre s'ouvre, il faut descendre tout en bas et sélectionner "Sanguino" cliquez ensuite sur "install" A nouveau dans l'onglet "Outils" -> "Type de carte" -> sélectionnez tout en bas "Sanguino" Toujours dans l'onglet "Outils" -> "Processeur" -> sélectionnez "ATmega1284 or ATmega1284P (16Mhz)" Et enfin dans l'onglet "Outils" -> "Port" -> sélectionnez le "COM" disponible (Dans mon cas le COM3 - Pas forcement le même pour tout le monde) Si tout c'est déroulé correctement en bas à droite de la fenêtre Arduino devrait apparaître Sanguino, ATmega 1284 or ATmega1284P (16Mhz) on COM *Numéro du port* Mon iMac est sous Windows 7, je ne me rappel plus si l'architecture de Windows 8 ou 10 est semblable mais sa doit être quasi pareil : Rendez vous dans le dossier "Arduino" situé : C:\Users\%username%\AppData\Roaming\Arduino15\packages\Sanguino\hardware\avr\1.0.2 (N'oubliez pas d'afficher les fichiers et dossier caché / outils -> option des dossiers -> affichage -> Afficher les fichiers, dossiers et lecteur cachés) Le fichier qui nous intéresse se nomme "boards.txt" Ouvrir le fichier boards.txt avec un éditeur de texte (Je conseille Notepad++) et ensuite nous allons modifier la ligne suivante : ancienne ligne -> sanguino.menu.cpu.atmega1284p.upload.speed=115200 nouvelle ligne -> sanguino.menu.cpu.atmega1284p.upload.speed=57600 Enregistrez les modifications Ensuite, télécharger le firmware qui vous intéresse sur http://dist.dagoma.fr/ Une fois DL, extraire l'archive et naviguer jusqu'à trouver marlin.ino -> Marlin-Firmwares_D200_Melzi_1486395042_039955afcddbfd13dd2dfc4fc9a438ab\Marlin\Marlin.ino Double cliquez sur Marlin.ino, cela va ouvrir Arduino Pour finir faite les modifications que vous désirez dans le configuration.h (ou pas d'ailleurs ^^) et cliquez sur la flèche de droite "Téléverser" Une fois le téléversement terminé, en bas dans à gauche devrait apparaître "téléversement terminé" Bonne journée !





 1 point
1 point -
Bonjour, je vous fais part d'un petit retour d'expérience ... Dagoma propose un écran de contrôle à 49€ (hors frais de port hum hum), je le trouvais un peu cher sans être vraiment convaincu de son utilité. En cherchant du côté des chinois (AliExpress pour ne pas le nommer), je trouve un écran très ressemblant (Panneau De Contrôle LCD 12864) à moins de 10€ frais de port compris (^^) Peu de risques pour la somme engagée, il faut juste être patient pour la livraison (13 jours montre en main, c'est pas si mal). En attendant de le recevoir, j'imprime les 2 parties du boitier et j'achète quelques vis M3-16. Le montage ne pose pas de problème particulier si ce n'est qu'il ne faut pas oublié de retirer le support d'impression au niveau de la carte SD (honte à moi !). Mais problème au moment du branchement : naïvement, je connecte les nappes suivant les détrompeurs, je charge le firmware pour écran de contrôle depuis dist.dagoma.fr, je relance l'imprimante et ... rien, juste des petits claquements au niveau du buzzer de la carte 12864. L'astuce n'est pourtant pas compliquée : il suffit de regarder les images de montage de l'écran par dagoma pour s'apercevoir que le montage de mes nappes est inversé, il suffit de couper le détrompeur des deux nappes pour les rebrancher dans le bon sens pour que ça fonctionne ! Donc voilà, pour moins de 15€ tout compris on a un écran fonctionnel ! pour l'utilité on verra à l'usage. J'ai trouvé un point positif : il est possible de calibrer l'axe Z directement depuis l'écran en entrant la valeur calculée lors d'un précédent calibrage (-1.6 dans mon cas avec buildtak) et donc sans rapasser par la Dagom'App. En espérant que ce post puisse en aider quelques uns ...1 point
-
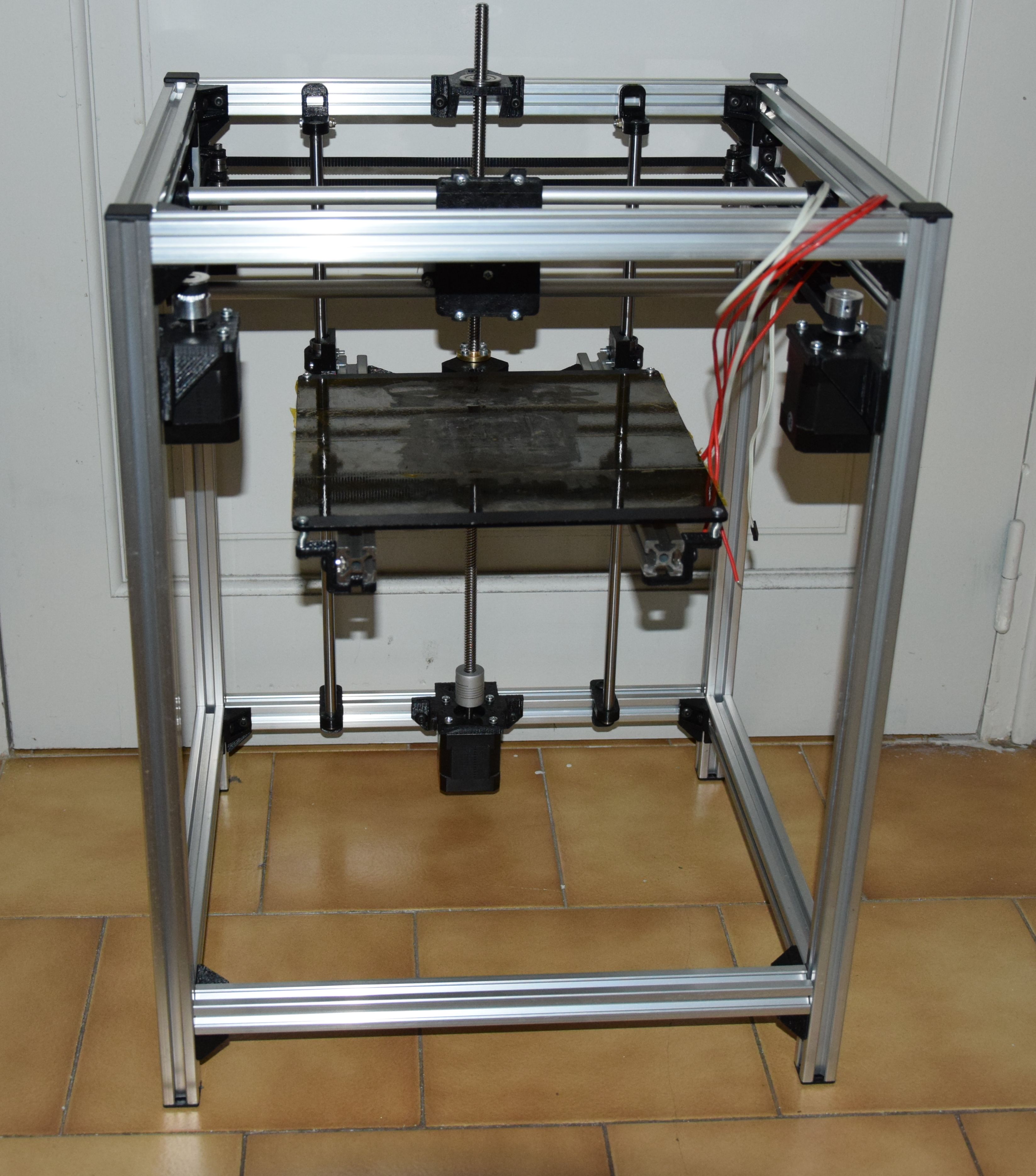
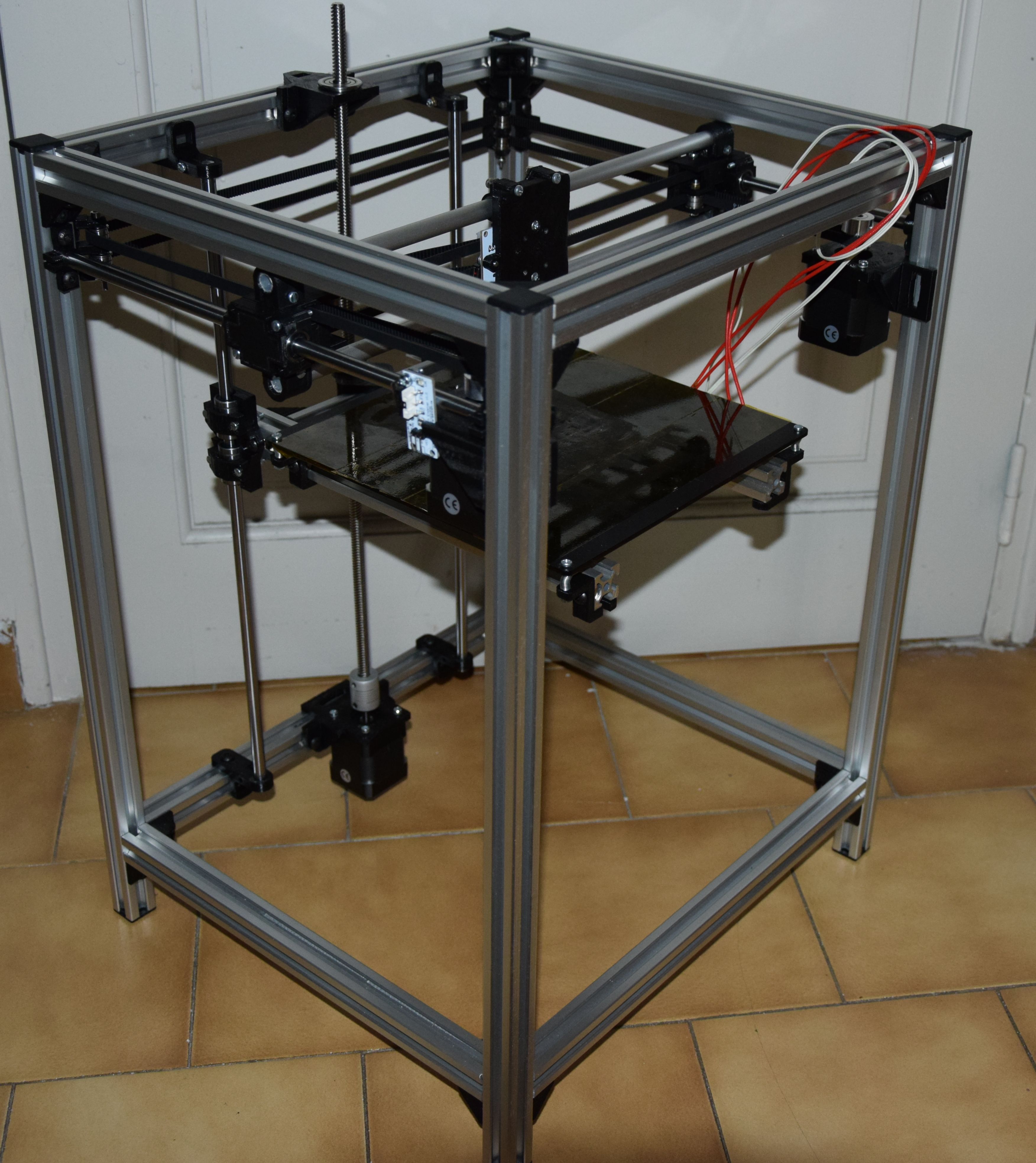
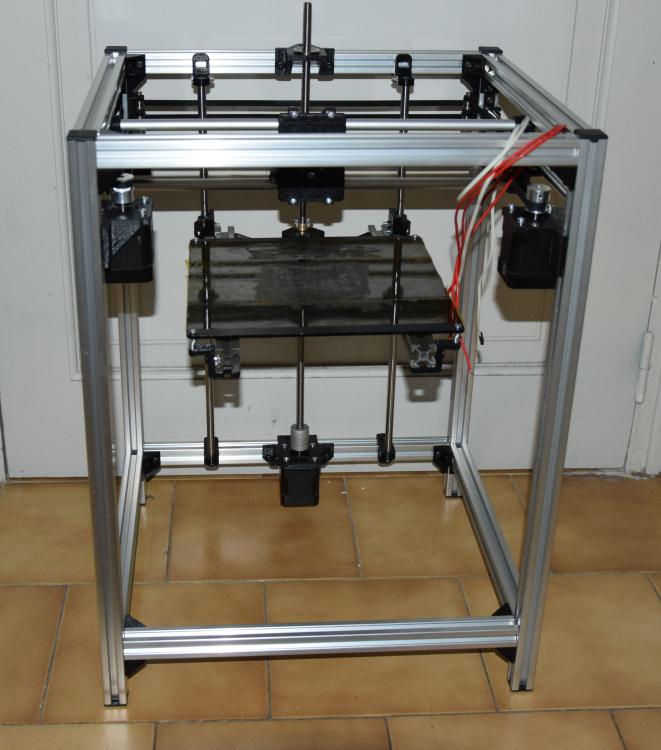
Bonjour a tous Pour faire simple je possédais une prusa i3 rework de chez reprap france, mais je voulais changer de type de fonctionnement et aussi de désign. En fouinant sur Thingiverse je suis tombé sur l'hypercube créé par Tech2C: http://www.thingiverse.com/thing:1752766 Les seuls modification apporté a la Bon d'origine est la taille de l'impression pour pouvoir imprimé sur 200x200x300 Voici déja quelques photos prise lors du montage.
 1 point
1 point -
J'ai essayé d'en imprimer, mais c'est vraiment pas top (pas le bon diamètre intérieur) et à mon avis l'usure doit être rapide1 point
-
[edit] j'avais oublié les images ... j'aime bien les images honnêtement et perso .... je ne conseillerai pas Je ne sais pas si tu auras le niveau de précision et répétabilité nécessaire pour en faire plusieurs vraiment identiques et aux cotes de plus il y la question de la matière qu'ils utilisent pour son pouvoir glissant et résistant à la déformation etc ... Le Drylin Ils le commercialisent sous forme de filament pour fdm , le iglidur, mais ça vaut un bras ... aux alentours de 100€ ramené au kilo http://www.igus.fr/wpck/13322/N15_04_12_iglidur_TriboFilament?C=FR&L=fr En plus de devoir démonter/remonter.. re-régler ta machine pour un résultat incertain et faire marche arrière si ça va pas .... alors que cela coute quelques roros tout fait ..... Fais des recherches sur le fofo ... il me semble que certains avaient essayé un temps ... je n'ai pas suivi ....Ce n'est que mon avis

 1 point
1 point -
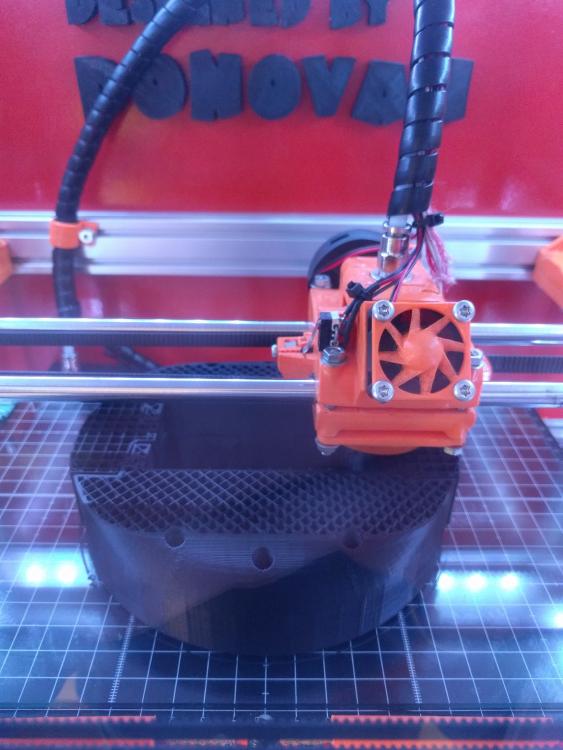
@Donovan-88 j'ai commander les même pour ma prochaine imprimante!!!! mais x6. J'ai l’intension de monter une delta avec un diamond hotend en 32 bit (projet d'y il y a 1ans). je les ai pas encore testé aussi, car j’attends la livraison de électronique. Ça fera l'objet d'un prochain sujet car j'ai encore beaucoup d'inconnue à résolves, et bien sur pour partager. Pour le bruit, d’après mon expérience c'est lié au microcontrôleur. 1/16 bordel monstre, 1/32 ça se calme, comme un ventilo normal qui tourne a fond, 1/128 silence... 1/256 voyage sub-spacial (jamais tester) La preuve avec les TMC2100 installer sur X et Y depuis peut, a la place des DRV. Ils font moins de bruit que les ventilo. +11 point
-
Ah ! Eh bien ça vient peut être de l'angle de vue.. je ne sais pas mais en tous cas en réalité tout est bien parallèle pas d’inquiétude ! Pour ce qui est du capteur, la première version n'en avait pas : c'était avec une butée mécanique. Le capteur permet maintenant de faire descendre la partie movible plus bas que le plateau, dans une position de rangement.1 point
-
Je me réponds à moi même ^^ Voici les modifications du configuration.h afin que la tête soit pleinement fonctionnel dans mon cas... Ligne 497 : // Travel limits after homing (units are in mm) #define X_MIN_POS 15 #define Y_MIN_POS 15 #define Z_MIN_POS 0 #define X_MAX_POS 205 #define Y_MAX_POS 205 #define Z_MAX_POS 205 Ligne 611 : #define X_PROBE_OFFSET_FROM_EXTRUDER 0 #define Y_PROBE_OFFSET_FROM_EXTRUDER -18 #define Z_PROBE_OFFSET_FROM_EXTRUDER -10 Ligne 652 : // The position of the homing switches #define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used //#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0) // Manual homing switch locations: // For deltabots this means top and center of the Cartesian print volume. #if ENABLED(MANUAL_HOME_POSITIONS) #define MANUAL_X_HOME_POS 15 #define MANUAL_Y_HOME_POS 220 #define MANUAL_Z_HOME_POS 0 //#define MANUAL_Z_HOME_POS 402 // For delta: Distance between nozzle and print surface after homing. #endif1 point
-
Oui ^^ ou celle-ci pour m'assister dans mes projets1 point
-
Bonjour, d'accord merci pour là redirection, je n'avais pas fait attention. Je vais tester ça dès réception de l'imprimante :). Et sinon connaissez vous un lien qui expliquerais simplement et précisément la création et l'installation d'un plateau chauffant ? @stan42 si tu en as un je suis preneur, tu fais vraiment du bon boulot :). Merci1 point
-
1 point
-
Le mieux pour les courroies, c'est de les tendre avec l'outils (Il doit parfaitement toucher de part et d'autre le fond en plexi) et de mettre toutes les vis de bridage à la fin. Ensuite, met les vis (coté avant machine en premier) sur chariot gauche et droite, plaque ton outils sur le fond, retend et fixe coté arrière machine.1 point
-
Ok je vérifies ça ce soir1 point
-
On dirait une moto 50cm3 En tout cas, beau boulot !1 point
-
Génial ta vidéo! C'est ton moteur en Z qui fait le drôle de bruit la?1 point
-
Salut Tu dois avoir des barres mal enfoncées dans les logements. Revois ton montage et serres bien les anneaux après avoir tout mesuré. Et bien sur il faut recalibrer le Z !! A+1 point
-
Absolument pas ! Ceux qui font cela ... c'est pour se faire plaisir à mon avis (ça fait plus tech/barbu ^^) tu n'as besoin que de connaitre 3 valeurs factuelles .... le nombre de pas par mm déclaré dans ton paramétrage de firmware ..... la mesure de ce que tu demandes et la mesure constatée ... point. Et c'est la même chose pour les déplacements de tes axes A l’extrême limite tu ne prends même pas en compte les nombre de pas de ton stepper... tu constates ... tu appliques PS: fais gaffes au double post à la suite... tu vas te prendre un tir ... moi je pardonnerai car tu es nouveau1 point
-
sois le bienvenu Pierre (avec un peu de retard puisque l'on a déjà échangé par ailleurs)1 point
-
Super ! Je comprend bien mieux, je viens également de faire un tour sur les tutos, et il y à également la même explication que tu m'as décrite. Je viens de finir de tout régler, reste à vérifier cette chauffe de l'axe X, il me semble que je ne suis pas le seul dans cette situation. Si je suis le tableau j'étais en 1/16 avec tout les cavalier sur "on", donc vu que je suis passé sur du 1/32, je n'ai pas besoin de modifier si je comprend bien. Pour ce qui est de l’extrudeur, j'ai vraiment pas envie de démonter mon Titan pour calculer le nombre de dents et le diamètre de la couronne, je vais faire plusieurs test, et paramétrer en conséquence. Désolé pour le petit hors-sujet : Voila une ancienne impression, avec ma pro x quasi stock, j'en mettrais avec mon E3D pour que vous vous fassiez une idée de ce que donne cette merveille avec des pas plus précis PS : j'aime passer des heures à régler mon imprimante pour avoir une qualité au top, sa ce vois beaucoup dans mes impressions je pense Je confirme, mais je viens de me rendre compte que mes moteurs sont à 1.0A, je devais donc mettre 0.5, mais j'ai dus baisser pour certain et monter pour d'autres au final ... Autant pour moi, je n'avais pas revu ta méthode, car il me semblais avoir vu sur le tuto que pour un extrudeur démultiplier comme le mien, il falais avoir le nombre de dents, ainsi que le diamètre de la couronne1 point
-
J'ai corrigé la bouillie que j'avais écrit Je me pose des fois des questions quant a la fiabilité des caracteristiques fournies avec moteurs Tu n'as aucun besoin de démonter quoique soit .... ni de rien compter..... simplement mesurer1 point
-
Il n'y a pas de conseil particulier à apporter. Pour le réglage de la Vref, il y a une formule de calcul simple à réaliser en fonction des caractéristiques du moteur concerné (et du type de stepper) pour un DRV c'est assez simple c'est l'intensité nominale max du moteur divisé par 2 qui donne la vref .... par exemple pour 1.68 A cela donne une vref de 0.84 volts (840 mV). Pour les rapports de pas c'est une autre question. Pour un extrudeur pas besoin d'avoir une definition trés élevée un rapport de 1/16 est largement suffisant ... il faut privilégié le couple [edit] Comme le dit @pascal_lb1 point
-
Bonjour ! Voici la dernière version de l'imprimante, celle que je présenterai à la Maker Faire de Grenoble ce week-end ! On m'a contacté pour que je présente ma machine à la Maker Faire Paris, il y a donc de bonnes chances pour j'y soit (9, 10 et 11 juin)1 point
-
attention! même un laser de 500 mW peut occasionner de graves brûlures aux yeux, une paire de lunettes spéciale coûte entre 10 et 30 € pour un laser classe 2, pourquoi s'en priver!!1 point
-
heuu le mec qui te propose des couches de 50 microns a fumée la moquette ou il se fou ouvertement de toi . 50 microns pour ta piece c'est plus d'une semaine de print en 250 microns : 17hrs en 150 microns : 24hrs en 100 microns : 40 hrs en 50 microns environ 80hrs a savoir que tu verras aucune difference entre 100 et 50 microns1 point
-
Bonjour Thomas je ne sais pas ce que tu appelles pas cher , mais vu les dimensions y en a pour minimum 20hrs de print . fais un test de prix ici pour voir ce qu'ils disent : https://www.lesimprimantes3d.fr/faire-imprimer-en-3d/1 point
-
Voici une autre copine tête de mort de la même taille


 1 point
1 point -
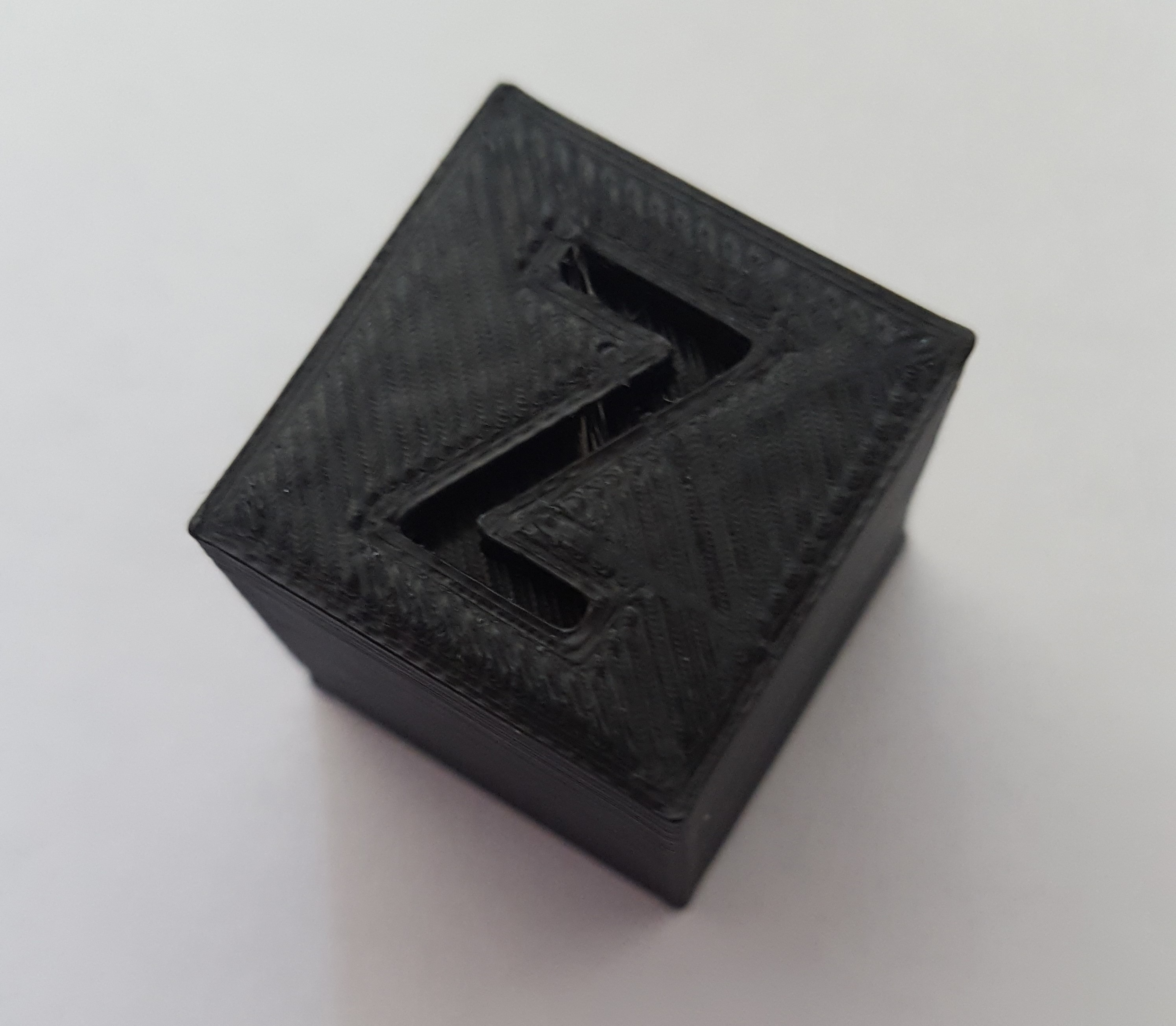
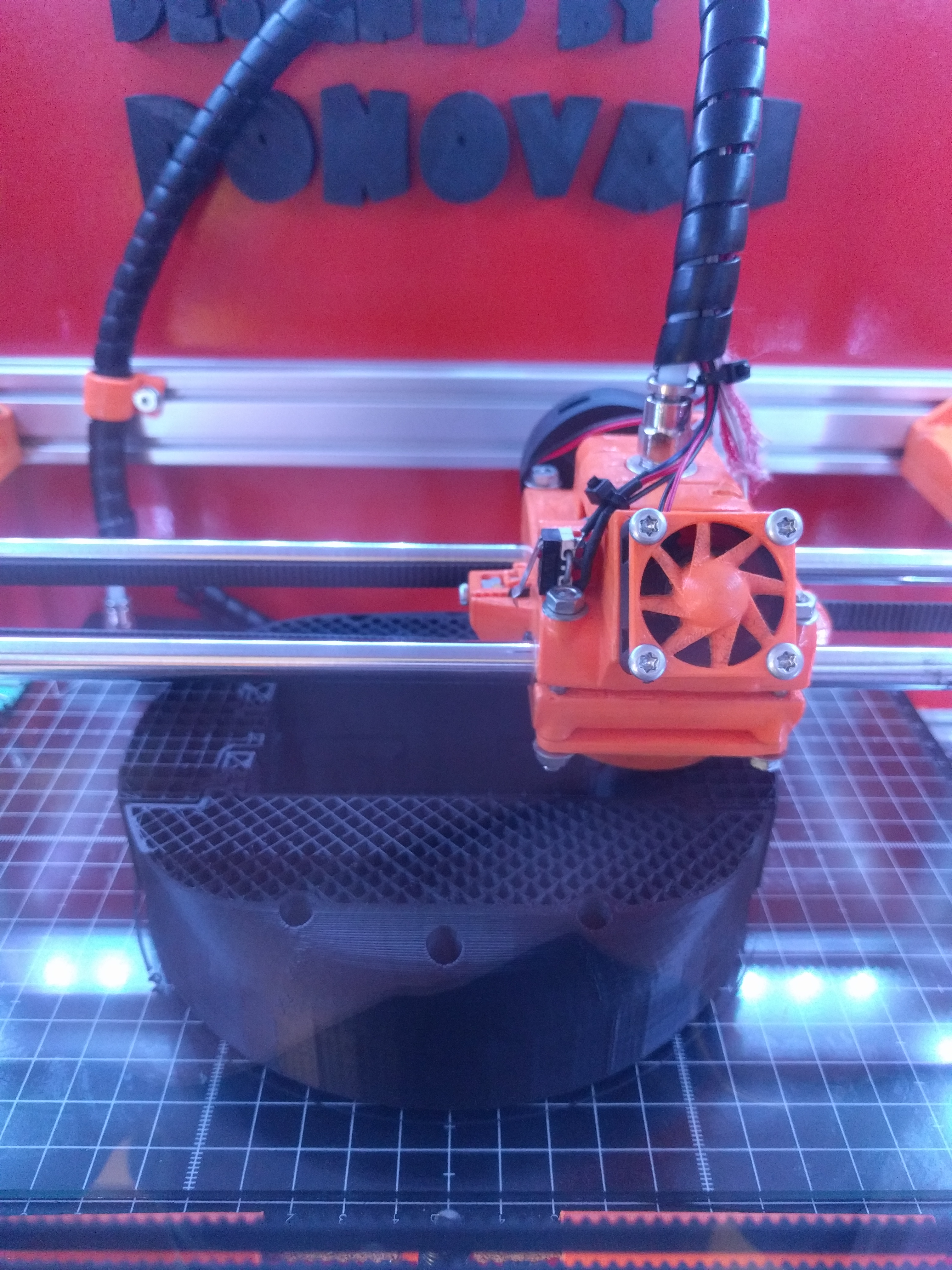
Désolé pour le retard. Voici deux pièces déjà imprimées et fignolées : La plus grosse, 26h annoncé finalement c'était 15h30 au total car j'ai accéléré. Mais j'ai du imprimer séparément les 7 derniers centimètres car ma buse à bouchée. Voici une photo @azbloc de l'infill : Avec la finition acétone je pense que ça sera assez costaud. Et voici l'autre pièce, 8h45 en 15% de remplissage et toujours en ABS : Ça va être énorme!!!


 1 point
1 point