fasteco
-
Compteur de contenus
9 -
Inscrit(e) le
-
Dernière visite
Récompenses de fasteco
")





-
Idée a étudier (à voir), Y et Z sur berceau.
fasteco en réponse au topic de fasteco dans Discussion sur les imprimantes 3D
Oui ! C'est par ce qu'il n'y en n'a pas beaucoup, des avantages. Et que... j'ai pas vu d'essai avec cette configuration, juste une idée il y a pas d'obligation. Bon, il y a aussi le fait que j'ai justement 2 moteurs Pas à Pas, 1,8 degrés / pas. Et un petit 3ieme pas très puissant, 0.9 degrés / Pas. Et quelques autres pas facile à définir, mise a par qu'ils s’agit toujours de Pas à Pas. -
Idée a étudier (à voir), Y et Z sur berceau.
fasteco en réponse au topic de fasteco dans Discussion sur les imprimantes 3D
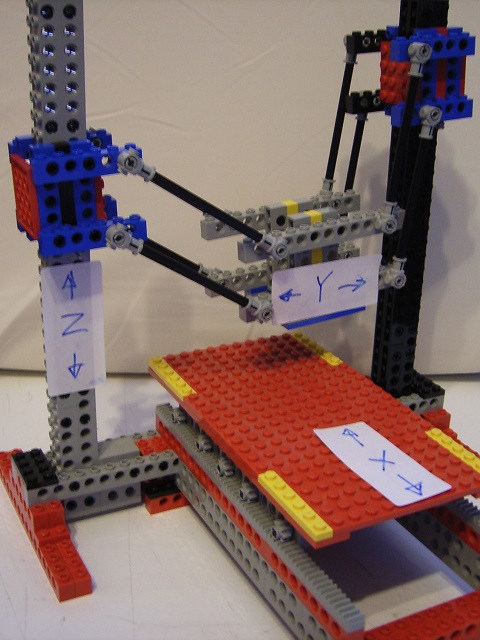
Ok alors donc, Dessin et photo... ne reprend que le Y et Z, qui correspond a Z en hauteur de l'image et Y et largeur de l'image. Le X non représenter ni dessin ni photo, mais imaginé sur la tranche. Je prépare déjà un gros Lego avec 3 axes en maquette (non fonctionnelle faute de pièce), et je rajoute des repères X,Y,Z. ... Edité : La machine en entier ... Un montant gris (premier plan) pour un moteur. Un montant noir (en retrais) pour le second moteur. Et un troisième moteur pour le plateau rouge X. J'ai disposer l'axe X sur un plateau qui lorsqu'il avance par en porta-faut, il ne s'agit pas d'une erreur, je soutient l'idée qu'au final il puisse être plier ou démonter, plier en rabattant Y et Z sur X au-dela du plateau ! Pas simple à s'imaginer la chose, imaginer le berceau plus haut beaucoup plus haut, avant de le voir rabattu.
-
Idée a étudier (à voir), Y et Z sur berceau.
fasteco en réponse au topic de fasteco dans Discussion sur les imprimantes 3D
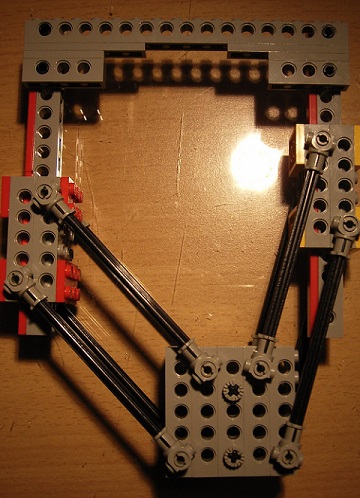
R'aah m'enfin ! (*) Matc > oui il y a une inversion car en Lego (je me rend compte de mes propos) les tiges ne mesure pas assez long pour que les guides puisse être lier horizontalement d'en bas. D'où la mauvaise orientation de la liaison horizontal, faute de place pour le teste de mobilité j'ai inverser (donc en haut !). Voir comparaison entre dessin et photos référence pièce 4. gt22 > Rotation ? m'heu non. Il manque le X sur un plateau (cf: voir réponse à Matc, comparaison entre dessin et photo). Et puis j'ai pas assez de Lego pour faire une machine complète, quoique . (* référence Gaston Lagaffe (BD)) -
Idée a étudier (à voir), Y et Z sur berceau.
fasteco en réponse au topic de fasteco dans Discussion sur les imprimantes 3D
Vraiment ? ... bon il arrive ! Dans le respect des lecteurs j'ai recadrer et réduit l'image.
-
Idée a étudier (à voir), Y et Z sur berceau.
fasteco en réponse au topic de fasteco dans Discussion sur les imprimantes 3D
Une version delta utilise des rotules, alors que le berceau avec les bras ( au nombre de 4 par glissière ) utilise des pivots simple. P'tite note : Pour vérifier que l'idée fonctionne j'ai ressortie mes vieux Lego technique et ça marche. Sur demande je rajoute une photo du bidule en Lego ... le ridicule ne tue pas. -
Idée a étudier (à voir), Y et Z sur berceau.
fasteco en réponse au topic de fasteco dans Discussion sur les imprimantes 3D
Bonjour, Moins d'explication laisse place a plus d'imagination .. alors imaginé ceci Une imprimante 3D delta, sans l'un des trois montant/moteur, ajouter deux bras pour maintenant l'extrudeur sur une assiette horizontal. Et heu rien d'autre. Voilà j'aurai du faire mon explication en une phrase. -
Idée a étudier (à voir), Y et Z sur berceau.
fasteco a posté un sujet dans Discussion sur les imprimantes 3D
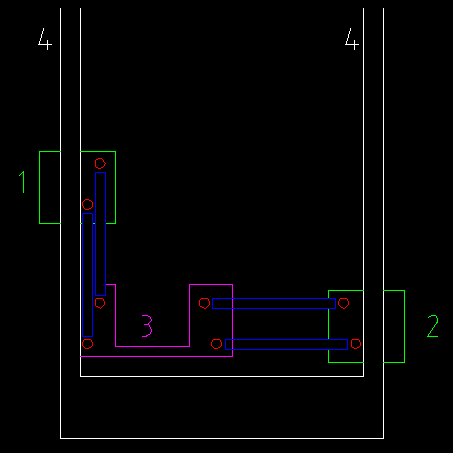
Bonjour, au risque de dire une connerie ... Je lance une idée de conception à étudier si quelqu'un si intéresse, je ne sais pas si une tentative existe. Je ne compte pas en réalisez une par moi-même. Il s'agit d'un mixe entre delta et portique. J'ai vu plusieurs façon de construire une imprimante 3D. - cubique. - portique. - portique a renfort triangulaire. - potence. - delta. Et si j'en oublie. ... Une idée saugrenu (peut-être) passe dans ma pauvre tête, une version à berceau : L'axe Y et Z sur un berceau, l'axe X reste a plat sur un plateau. - 2 moteurs pour 2 pairs de guides avec 1 tige fileté en vertical, (repère 4). - 2 glissières soutienne 8 barres (4 par glissière, et donc 2 par guide), repère 1 et 2. - De sorte que le berceau reste sur un plan horizontal quoi qu'il arrive, repère 3. Si un moteur monte* (repère 2) et que l'autre descend* (repère 1) le berceau va faire un mouvement sur Y. Si les 2 moteurs bouge sur la même distance et dans la même direction le berceau va faire un mouvement sur Z. * : par calcule les moteurs maintienne le niveau sur Z. L'inconvénient pour Y, les coordonnées doivent être calculé en absolu et non pas en relatif. En relatif il y a le risque de perdre en résolution dans des petits angles successivement arrondi, additionnée, arrondi, (exemple d'angle former par le guide et glissière 1 avec les bras en bleu sur l'image). Le réglage de coordonnée d'origine devra -si j'imagine bien la chose- être centré à cause des butés de fin de course symétrique en haut des guides 4, du coup la pièce aura pour "moitié" -Y et "moitié" +Y. Je pense que les guides (4) n'auront pas besoin d'être fermer en haut et donc reste en U. A priori il y a pas de contrainte qui écarte le parallélisme, surtout si les moteurs reste synchronisé dans des coordonnées absolu. Avantage, démontable voir pliable. Si l'ensemble Y, Z est en 1 bloc il reste a glisser et stabiliser le plateau pour axe X à 90 degrés. Voilà. A voir !
-
Bonjour, je suis... assez bricoleur pour en parler
fasteco en réponse au topic de fasteco dans Présentations
"Pas tout capté" argh, bon et bien je vais tenter d'être plus factuel à l'avenir. Oui pour une photos, j'ai dessiner (en DXF) et réalisez une capture d'écran puis recadrer proprement, j'espère ne pas lancer un sujet à la con faute de connaissance pratique sur la conception. Est-ce que j'explique l'idée ici ou sur "fabriquer un imprimante 3D" ? car je ne compte pas en fabriquer une moi-même -
Bonjour, Je suis juste assez bricoleur pour bavé sur ses machines 3d qui sorte de-ci de-là. Je suis 'malheureusement' pas fortuné du tout, et je bave toujours, pire j'ai un horrible acouphène. Mais je bricole, juste, juste assez bien avec une scie a métaux et une visseuse pour faire des p'tits trou sans trop faire de bruit, sinon je devient fou ! hors de question par exemple de me servir d'une scie sauteuse ou d'une vrai perceuse. Du coup pesant le pour et le contre, j'ai en ce moment en construction -un machin- de gravure pas fini, qui fonctionnera (!) d'une dimension à peine inférieur à l'A3 avec un laser (mais c'est interdit ! oui je sais mais j'ai déjà mes lunettes donc forcement ... (alibi)). Et pour ce faire j'ai utiliser 2 ensembles de scanneur à plat (je suis un vieux je précise toujours 'à plat' car avant il y avais des douchettes scanner 'a mains'), pas de bol j'ai louper un trucs important dans ma conception il y a du jeu dans les engrenages (pfff idiot). Mais qu'importe, il a presque rien couter et je vais juste faire de la pyrogravure à la manière des anciens dessin d'illustration du 19ieme siècles et moins. Je me suis enregistrer ici pour laisser une idée de conception dans un autre coin du forum, peut-être est-ce une idée à la con, je vais de ce pas m'enquérir de l'avis des Pros.... disons demain.