EuReKaLoS
-
Compteur de contenus
18 -
Inscrit(e) le
-
Dernière visite
Récompenses de EuReKaLoS
")





-
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
Merci Tekila63 tu gère, je les ai laissé en 2.0.6.1 et maintenant ca tourne nickel. En effet 3000 c'était compliqué La j'ai tenté des print et pièce complexe en 70mm/s c'est très cool. Je suis quand même content d'avoir gardé mon châssis Acrylique et de voir qu'avec une carte mère ca fait un superbe taff. Prochaine étape la CR10S en carte mère TMC2209 -
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
Dernière update je pense Alors pour ma Anet A8, j'ai fini l'upgrade tout fonctionne sauf une chose. Mes moteurs pas à pas chauffent vraiment fort (j'ai le support PLA de mon Extruder qui s'est gravement déformé alors qu'il est à 625mA), j'ai donc décidé de les échangés avec la référence 17HS4401 qui on un courant en pique de 1.7A comparé au 0.9A des 42SHDC3025-24B pour X Y et E0. Si je vais en dessous de 680mA pour X Y je commence à avoir des problème de homing etc Je modifie donc le câblage et les moteurs. Pour un fonctionnement normal sans chauffe, visiblement, je devrais tout passer en 24v.. Sur mon châssis AM8 j'ai ajouté un endstop sur l'axe Y, j'ai déjà trois 17HS4401 sur X et Y et E0 avec dissipateur en prime. Bon j'ai eu un bouchon car ED3v3 clone mal réglé mais après 4h de print pas de chauffe excessive au touché et quel silence O.o" -
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
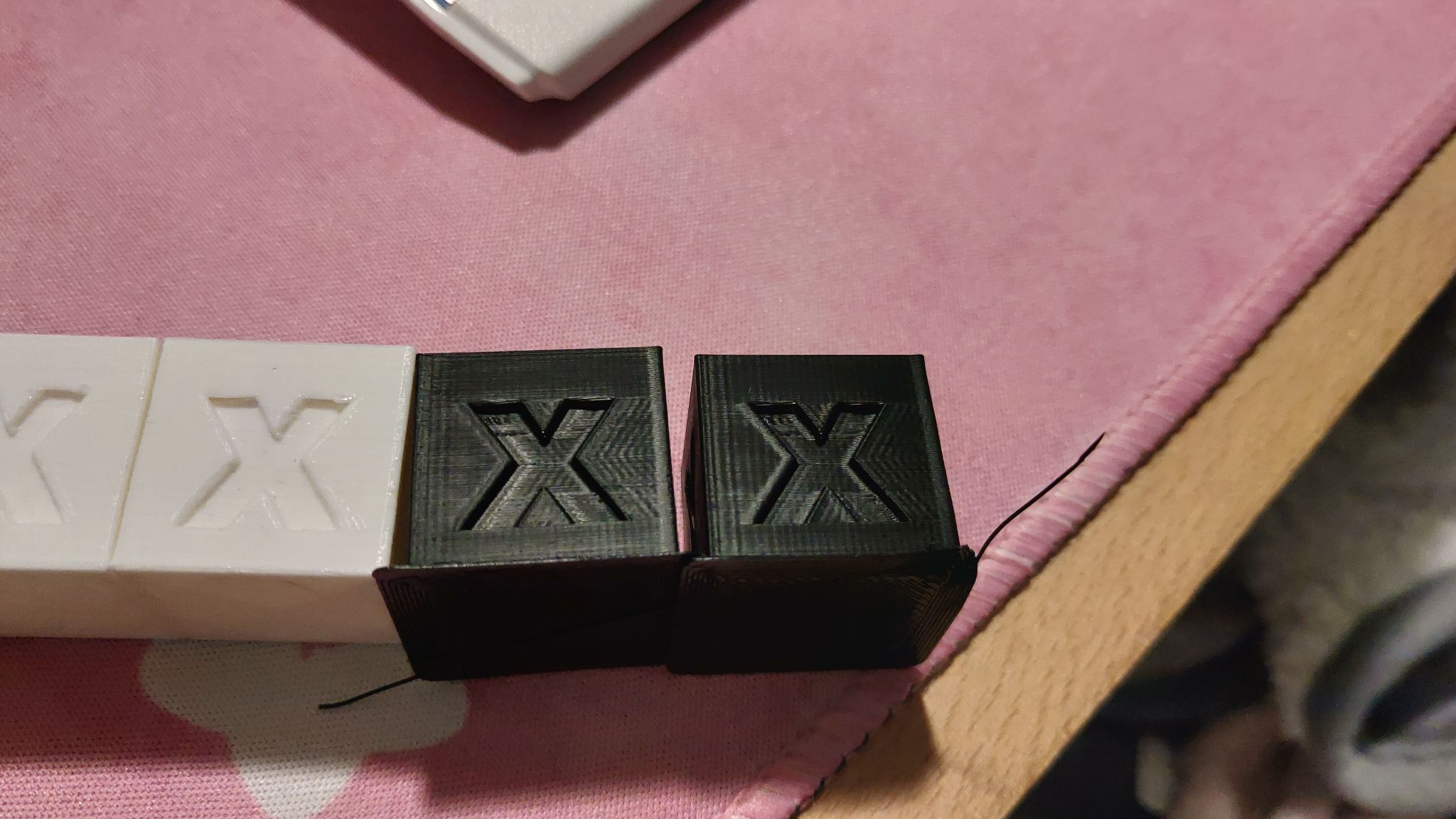
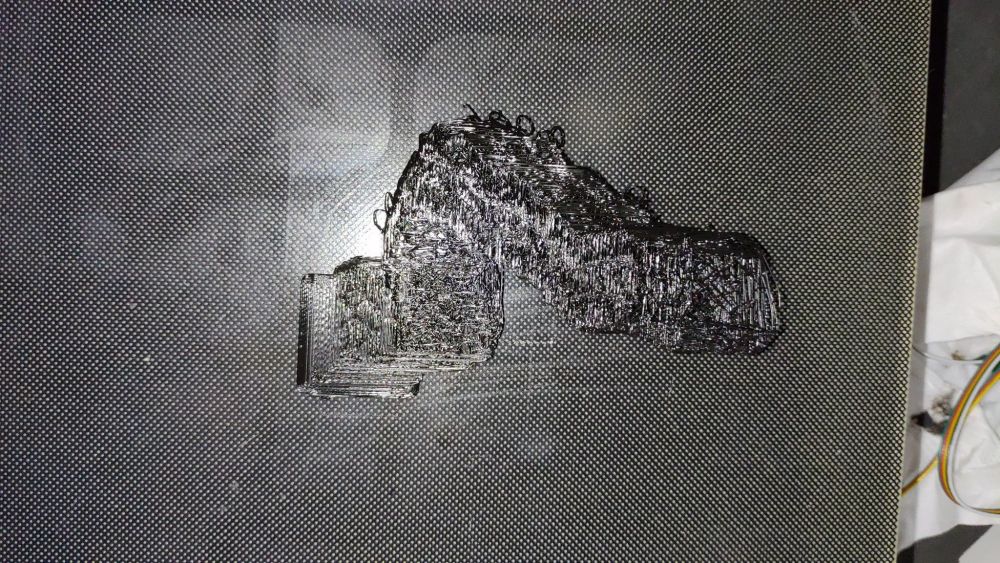
Bon, j'ai revu le current sur ma Anet A8 acrylique à 750 et ca fonctionne en Endstop et sensorless (625 c'était peut être trop bas). Je vais affiné les current plus tard car le moteur Y chauffe quand même pas mal (je ne peut pas gardé la main dessus) Mais le résultat et sans équivoque. A gauche en blanc avant upgrade, c'est rêche, le noir à gauche, endstop et à droite sensorless. Pour mon châssis AM8 j'ai trouvé le problème par hasard. Lorsque je lance un homing, l'axe X est OK sans soucis mais le Y me posé problème.. Impossible de détecté la fin de course sans soucis avec plusieurs valeur. En lassant mon doigts par accident, j'ai découvert que lorsque le support plateau bute dans le moteur, le homing fail mais si c'est avant le moteur, mon doigt ou un tourne vis par exemple (moins risqué) le homing Y se fait sans soucis. J'ai donc basculé le moteur de l'autre coté du châssis et je suis occupé de refaire une pièce pour servir de butée (à la place du moteur). Mais je pense que mon soucis et totalement réglé. J'ai repris exactement les paramètres de l'Anet A8 upgradée pour les mettre sur mon châssis AM8 avec les valeur spécifique. Dés que j'ai fini la butée et monter je pense que ca va le faire. Merci énormément. En vrai j'avais des problèmes avec mon châssis AM8 depuis plus d'un an et en upgradant ma Anet A8 acrylique vous m'avez aider à débloquée la situation Je laisse la config ici en Sensorless au cas où Configuration.h Configuration_adv.h
-
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
Ah mais c'était les valeurs fournis par Bigtreetech pour la SKR 1.3. Mais d'après ce que j'ai lu aussi à cause du sensorless, ca trigger les drivers et provoque ca chez pas mal de monde (dans les firmwares 2.0.5 2.0.6). Je vais désactiver le sensorless et testé avec les Endstops après tout ils sont encore installés sur l'acrylique.. Et je commence moi même à être trigger par tout ces problèmes exotique ^^ Résultat avec tes conseils, aucun changement Information importante, avant upgrade l'imprimante fonctionne sans soucis avec la carte mère ANet A8 d'origine. J'ai juste remplacé la carte mère par la SKR 1.3 et les TMC2130 et refait du câblage coté alimentation uniquement. La structure en elle même imprimé sans soucis avant changement.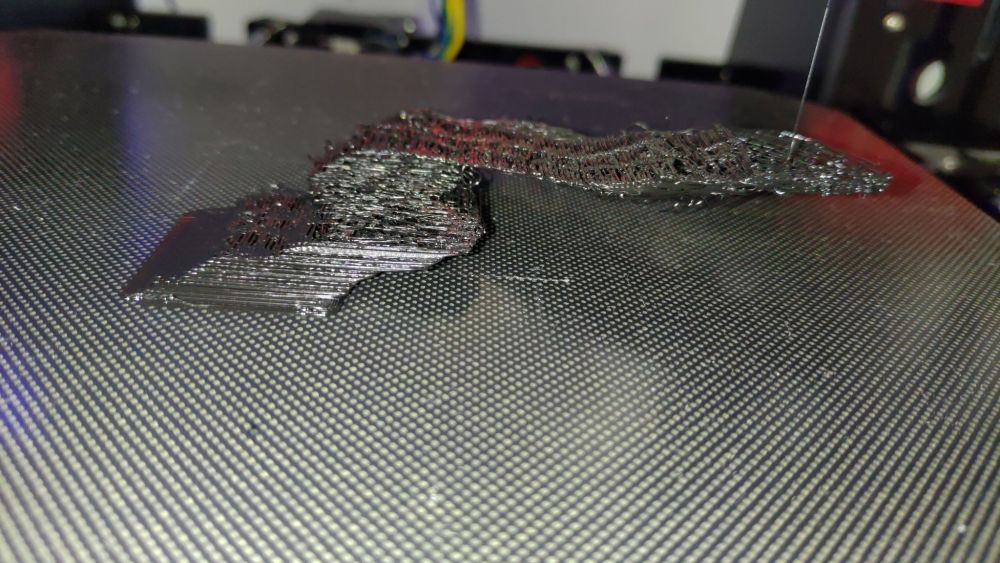
-
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
Je vais finir par en mettre si je continue à perdre mon temps comme ça xD J'ai aucun point dur sur le bed, j'ai bien envie d'inversé X et Y pour voir. La j'ai swaper de TMC2130, en plus j'ai des TMC2130 v2 et v3 à y rien comprendre... Si tu parle du fichier en lui même 50mm/s rien d'extra rapide. Sinon dans la configuration: #define DEFAULT_MAX_ACCELERATION { 3000, 3000, 100, 10000 } #define DEFAULT_ACCELERATION 3000 // X, Y, Z and E acceleration for printing moves #define DEFAULT_RETRACT_ACCELERATION 3000 // E acceleration for retracts #define DEFAULT_TRAVEL_ACCELERATION 3000 // X, Y, Z acceleration for travel (non printing) moves Je devrais activer //#define CLASSIC_JERK ? -
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
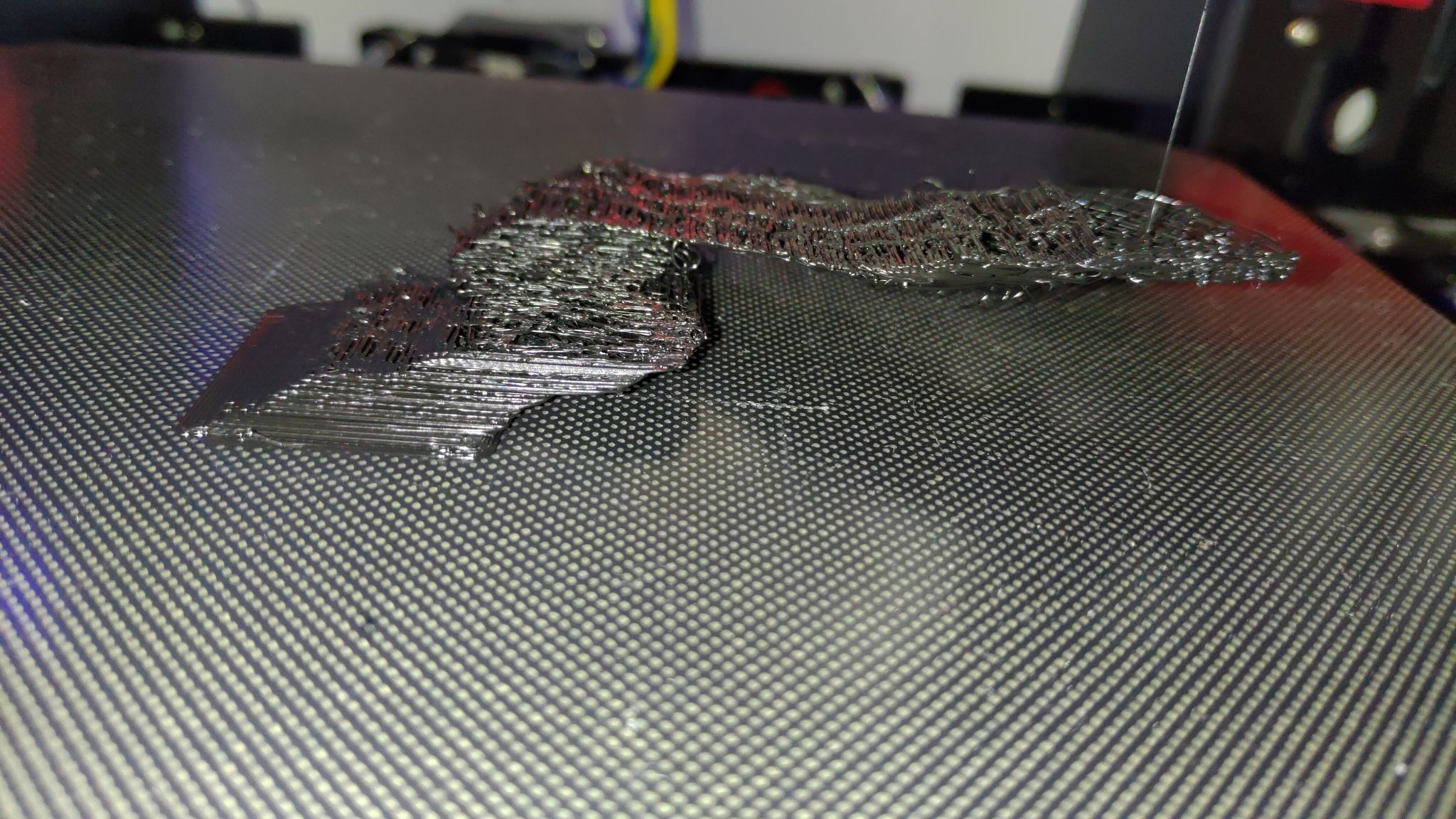
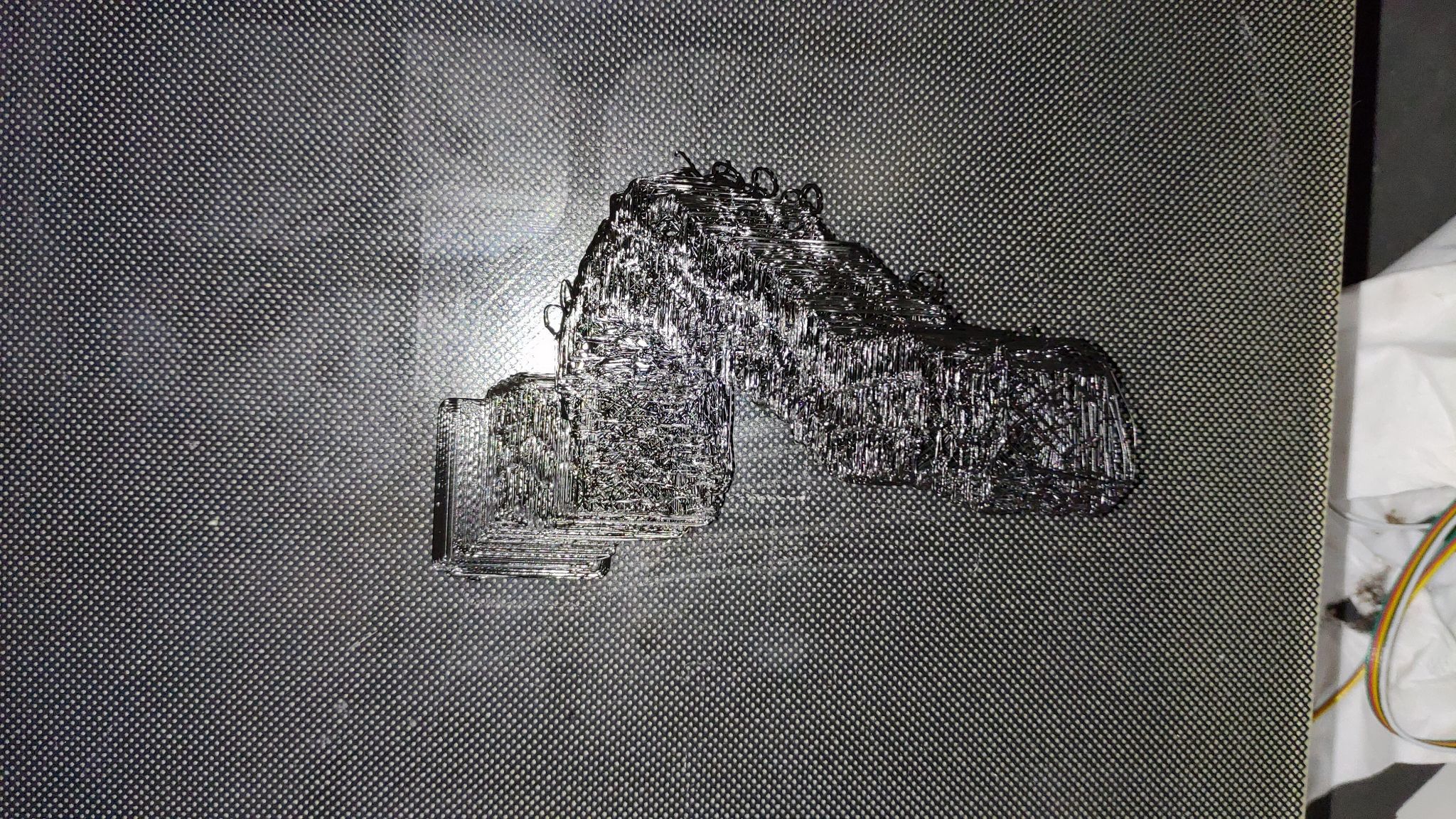
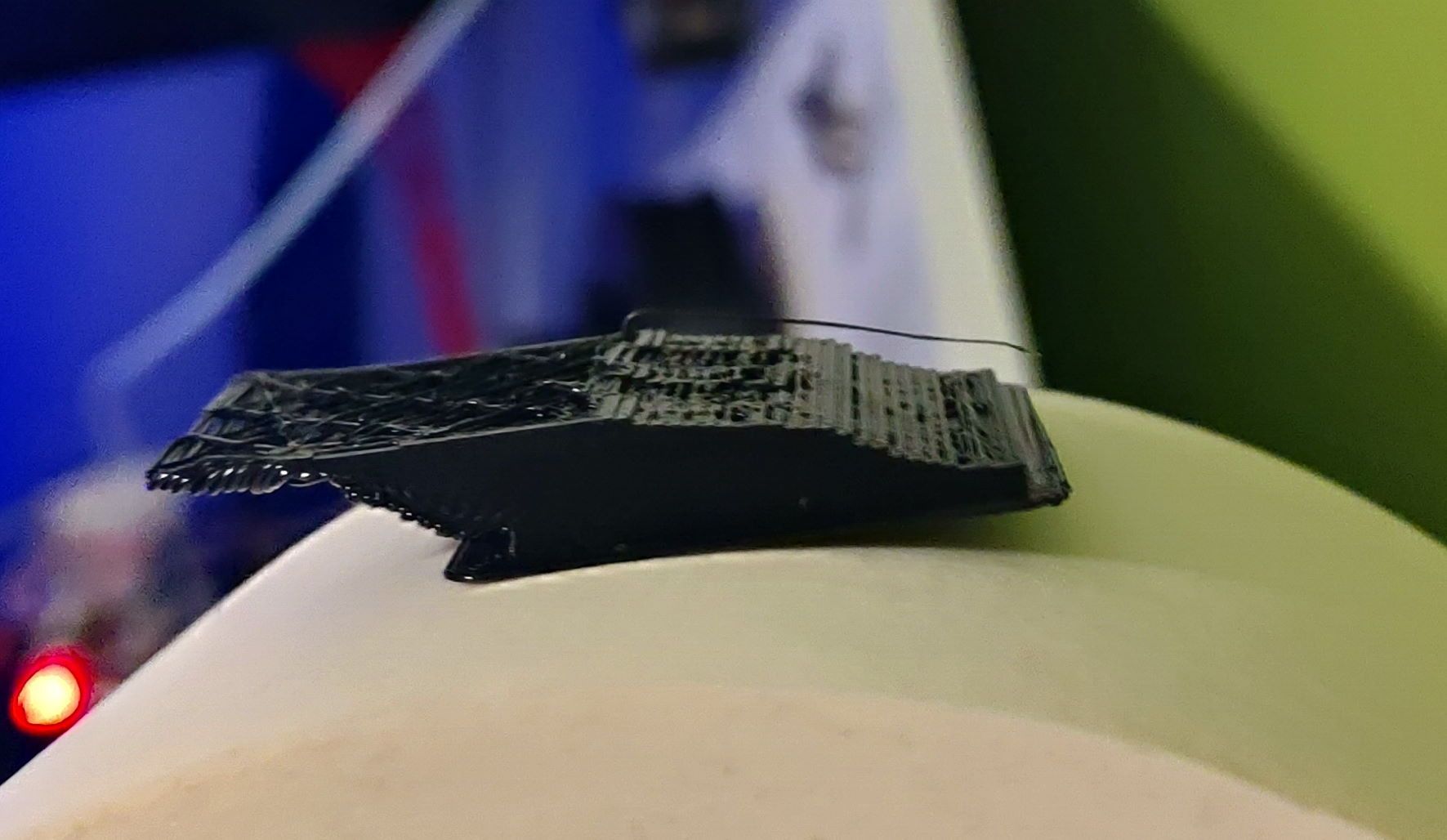
Chose étrange, j'ai du coup deux imprimantes avec le même problème. Elles font du Layer Shift uniquement sur l'axe Y toutes les deux. Carte mère SKR 1.3 TMC2130 SPI. Une avec le châssis Acrylique de la Anet A8, l'autre en châssis AM8. Et j'ai réussi à tout régler mais j'ai du Layer shift sur l'axe Y... Sur l'acrylique j'ai tenté: #define X_CURRENT 635 // (mA) RMS current. Multiply by 1.414 for peak current. #define X_CURRENT_HOME X_CURRENT/2 // (mA) RMS current for sensorless homing /2 en test Mes moteurs sont des 42SHDC3025-24B (current peak 0.9A). Mais même problème avec des 17HS4401 en 1.7A (donc current 1200) Et une sensitivity de 63, le homing fonctionne impec ca force même pas mais ca shift encore.. J'ai mal configuré mon Sensorless ?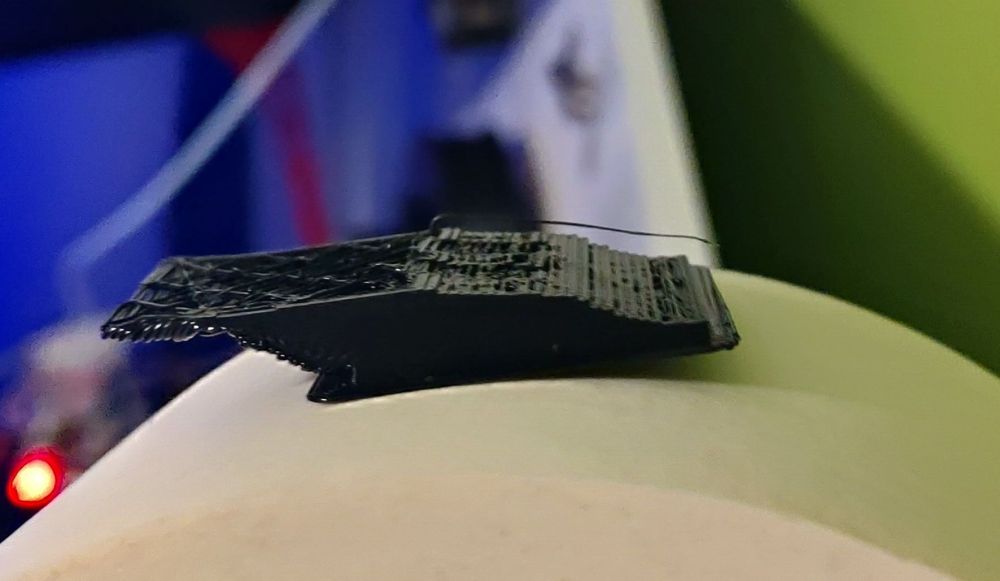
-
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
Bon avant tout merci beaucoup pour vos réponse, j'avoue j'avais la tête dans le guidon. J'ai démonté l'imprimante dés le matin, passé la journée à remonter/câbler la presque totalité du coté alimentation et re-sertis pas mal de connecteurs ça m'as fatigué à fond. Premièrement j'ai repris le firmware de zéro comme tu as proposé en Marlin 2.0.9.x mais mauvaise idée. Des paramètres ne sont pas identiques et j'ai penser aujourd'hui à la branche de chez BIGTREETECH, je suis donc allé télécharger BIGTREETECH-SKR-V1.3-master. Je retourne en 2.0.6.1 mais pas grave en soit ^^ J'ai configuré mes TMC2130 SPI mon bltouch, le sensorless et la premier tour de roue, quel banane je suis... L'axe Y viens vers moi pour faire sont Homing, il était INVERT de base.. Bref place au calculs X:110-124=-14 Y:110-114=-4 #define X_MIN_POS -14 #define Y_MIN_POS -4 Surtout ne pas oublier le "Reset EEPROM" Et pour le bltouch: #define NOZZLE_TO_PROBE_OFFSET { -38, -4, 0 } Lors du homing le bltouch arrive pile sur le X110.0 Y110.0. J'ai mis un margin de 15 pour évite la sorti de plateau vu que j'ai des bords qui laisse les vis apparentes sur mon Ultrabase. Merci encore à vous Jamais j'aurais pensé au Reset EEPROM, sincèrement. La qualité maintenant d'impression est dingue -
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS en réponse au topic de EuReKaLoS dans Biqu / BigTreeTech
J'ai pas trouvé ce dossier quand j'ai cherché sur le net pour être honnête et j'ai repris pas mal de données venant de mon châssis AM8. Pour les informations que tu as demandé, en settant les paramètre comme tu le souligne aucun changement, la prob sort encore du bed. Pour ceci: #define MANUAL_X_HOME_POS 9//(135-126)et(105-115) 135/105 valeur lors du home décalé 126/115 valeur sur la croix #define MANUAL_Y_HOME_POS -10// -39 C'est pour centré ma buse au centre du plateau, j'ai vu pas mal d'info contradictoire. Je vais lire le dossier que tu m'as envoyer je pense que les infos sont beaucoup plus complète que ce que j'ai trouvé ! A propos de #define NOZZLE_TO_PROBE_OFFSET { -25, -5, 0 } Dans la version 2.0.x de Marlin il était noté en gros que si le bltouch se trouve à l'avant gauche, ce sont des valeur négative. Il est décalé de 25 sur la gauche et 5 vers nous comparé à la buse, j'ai juste adapté ces données là car dans Marlin 1.0.x c'était positif. Bon après vérification avec le dossier que tu as fournis c'est exactement ce que j'avais compris... Quand ma buse est au centre du plateau les coordonnées sont: X:135 Y:105 Pour information j'ai laisser les ancien Endstop sans les connectés électriquement comme ca le sensorless homing touche les endstop non branché et le -13 du X est sensé être le même. Sur le Y ca fonctionne j'ai quasiment pas de décalage. Quand je met la buse en fin de bed elle est bien à 0 en Y ou 220. C'est vraiment le Y qui est chiant J'arrive à faire un bed leveling quand je met: #define PROBING_MARGIN 50 Tout mes réglages semble bon. J'ai aussi vérifier toutes les poulie qui possède bien 16dents chacune (et pas 20 comme sur mon autre imprimante). La je tente une cube voir les dimensions. Si ca tombe c'est encore un problème de steps/mm ayant plus les même drivers que la carte mère Anet ^^ -
Upgrade d'une Anet A8 en SKR 1.3 TMC2130 Marlin 2.0.7
EuReKaLoS a posté un sujet dans Biqu / BigTreeTech
Bonjour, je viens de finir l'upgrade de la carte mère de mon Anet A8. L'imprimante possède SKR 1.3 des TMC2130 en SPI Un Bltouch et tourne en sensorless avec deux moteur Z sur un coupleurs parallèle. Le chariot est le suivant: net A8 E3D V6 Bowden MODULAR X Carriage V4 *BEST ONE* Ayant pour offset ceux-ci: define X_MAX_POS 250 define X_MIN_POS -13 define Y_MAX_POS 220 define Y_MIN_POS -13 define Z_MAX_POS 250 define Z_MIN_POS 0 define X_PROBE_OFFSET_FROM_EXTRUDER -25 define Y_PROBE_OFFSET_FROM_EXTRUDER 5 define Z_PROBE_OFFSET_FROM_EXTRUDER 0 define LEFT_PROBE_BED_POSITION 27 define RIGHT_PROBE_BED_POSITION 205 define BACK_PROBE_BED_POSITION 200 define FRONT_PROBE_BED_POSITION 20 J'ai tester un premier cube dont des dimension n'était pas bonne (1.5cm pour X et Y et 2cm sur le Z) en gros j'avais deux trois erreurs sur DEFAULT_AXIS_STEPS_PER_UNIT Maintenant avec ces paramètres: #define DEFAULT_AXIS_STEPS_PER_UNIT { 80 , 80, 400, 420 } J'ai un nouveau problème. Le home fonctionne bien, j'ai du repositionner au centre du plateau mais quand je lance un Bed leveling, ma probe est sortie du BED lors du test inférieur gauche. Alors je ne comprends pas trop ou est le problème, j'ai centré ma buse lors d'un homing ici: #define MANUAL_X_HOME_POS 9//(135-126)et(105-115) 135/105 valeur lors du home décalé 126/115 valeur sur la croix #define MANUAL_Y_HOME_POS -10// -39 Et j'ai tenté de mettre manuellement les point de mesure du bltouch ici: #define LEVEL_CORNERS_INSET_LFRB { 85, 25, 255, 195 } // (mm) Left, Front, Right, Back insets Je vous fournis mes fichiers de configurations. Si vous avez des explications à mon problème ou de quoi m'éclaircir je vous en remercie d'avance Configuration.h Configuration_adv.h -
marlin SKR v1.3 en TMC2130 et Nema 17HS4401
EuReKaLoS a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonsoir, je lutte depuis un moment sur ce problème et il ne me reste plus que ça pour print. J'ai donc un chassis AM8 équipé d'une carte mère SKR v1.3 en Marlin 2.0.6 (dernière version en date). Le tout avec des TMC2130 SPI. Mon imprimante est alimentée par une alimentation PC ATX 350W 80 Plus. Un vrai bltouch et ma carte mère est bien ventilée. Alors tout est assemblé tout fonctionne enfin presque. Lorsque je pilote les axes X, Y et même Z avec le contrôleur sous Octoprint, ça fonctionne et au LCD aussi. Je précise que je suis en Sensorless sur X et Y mais j'ai un bltouch pour Z. Lorsque je commence le homing: G90 G28 X0 Y0 C'est OK mais lorsque je lance G28 Z0 La c'est fini, mon axe Z vibre, ainsi que X et Y, il se déplace un peu et ça tente de calibre le 0 de Z dans le vide avec des vibration... La prob de monb bltouch sort, reste dehors un moment puis peine a rentré. J'ai calculé ceci pour les nema: RMS Current = Max Current / 1.41 Soit: 1,20=1.7/1.41 Puis VREF=(RMS current*2.5)/1.77 1,69=(1,20*2.5)/1.77 (1,52 à 90%) Les potars de vref sont bien en 1,52v J'ai donc dans un premier temps mis 1200 pour: #define X_CURRENT 1200 #define X_CURRENT_HOME X_CURRENT/2 #define Y_CURRENT 1200 #define Y_CURRENT_HOME Y_CURRENT/2 #define Z_CURRENT 1400 Pour le /2 j'ai lu ça dans une doc avec les sensorless pour pas trigger, sinon mes axe font même pas le homing pour X et Y. J'ai abaissé les current à 1000 pour X et Y et laissé 1400 pour Z Pour le sensorless j'ai ceci qui fonctionne plutôt bien #define X_STALL_SENSITIVITY 2 #define Y_STALL_SENSITIVITY 6 Les mouvement sont bon mais ça foire pour l’initialisation 0. Je vous fournis mes fichier de configuration si vous avez une idée Je viens de passé ces trois dernier jours (12h chaque jour) dessus et la je vois pas d'où ça viens... Si vous avez une petite idée Configuration_adv.h Configuration.h -
Imprimant a partir d'un chassi AM8 RatRig
EuReKaLoS en réponse au topic de EuReKaLoS dans Discussion
Salut, donc j'ai presque tout reçu il manque les visserie mais ça sera sur mesure. Ouai le support de bed est noir pour l'habillage mais en vérité c'était le moins cher en prime Mes deux imprimantes sont en caisson avec électronique à l'extérieur et alimentation ATX 80 Plus. Maintenant je m'attaque au firmware pour la SKR 1.3 et donc passage sous Atom et PlatformIO qui est un package pour projet Arduino. Exit donc Arduino. Et je dois avouer pour le moment je n'y comprend rien même si je suis habituer au IDE lol Pour le bed, je dois soudé la thermistance et mes câbles. J'utilise toujours du connectique type ATX PC, c'est moins cher ca tiens bien l'ampérage et les connectiques sont standard donc tout bon. Des pièces aluminiums complète le tout

-
Imprimant a partir d'un chassi AM8 RatRig
EuReKaLoS en réponse au topic de EuReKaLoS dans Discussion
Yop, merci hésite pas, je vais partager tout ce que je trouve et les avancement. Je vais bientôt flashée la carte mère pour tester les Steppers. J'ai aussi prit des Steppers pour faire une conversion CNC d'une fraiseuse manuelle Je vais aussi couplé cette imprimante avec un Pine64 et non pas un Raspberry, on va voir ce que ça donne Je check asap si je peux coupler un hat relais comme pour la Raspberry. Théoriquement il devrais mieux tourné qu'une Raspberry (4 cœurs 2GB de ram) et le porte ethernet est en Gigabits. Matos manquant: -La connectique, proche du standard pour avoir le plug de plug and play possible pour facilité la maintenance en cas de pépins (XH2 6 pin je crois ? comme sur les stppers/CM ?) -Il me manque le Bed; j'ai vu en mesure du 30cm sur l'axe X mais je pense que le battement va me permettre de print uniquement jusque 27cm. -Le support de bed. -Visserie Bed. -Visserie autres -Les support de roulement -Tendeur Y (je vais le prendre en alu) -Pièces de l'axe X (en alu aussi Kit AM8) -Les roulements seront des Drylin Igus (que j'apprécie sur ma Anet A8). -E3Dv6 -Double Mosfet. Pour l'alimentation ca part directement sur une Alimentation PC avec connectique ATX modulable (changement d'alimentation possible et sécurisation électrique). Problématique a éviter: Je ne vais pas prendre des support de 3cm uniquement (SC8UU ou SCS8UU) mais par exemple 6cm de longueur(SCS8LUU je crois) pour la tête (en Bowden). Ça va réduire les zone sensible qui freine les axes (c'était chiant sur ma Anet A8) J'ai des vis qui ne sont pas serrées a fond mais avec du frein filets pour évité de freiner mes axes sur ma Anet A8 (support Bowden imprimé). Ici je ne veut pas avoir ces problèmes la. Je sais le mieux est de partir sur des Axe Linéaire rail mais on verras sur la v3.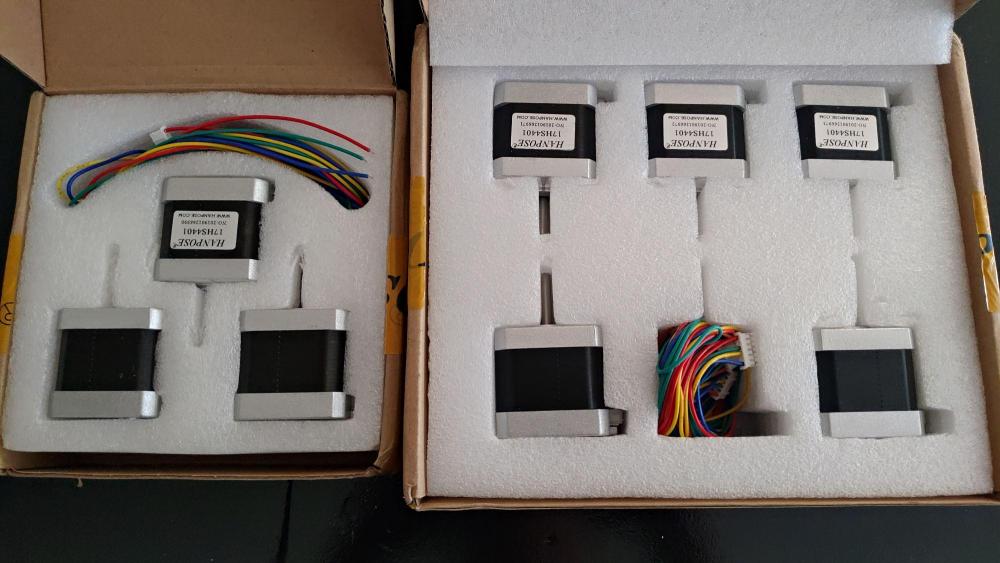
-
Imprimant a partir d'un chassi AM8 RatRig
EuReKaLoS en réponse au topic de EuReKaLoS dans Discussion
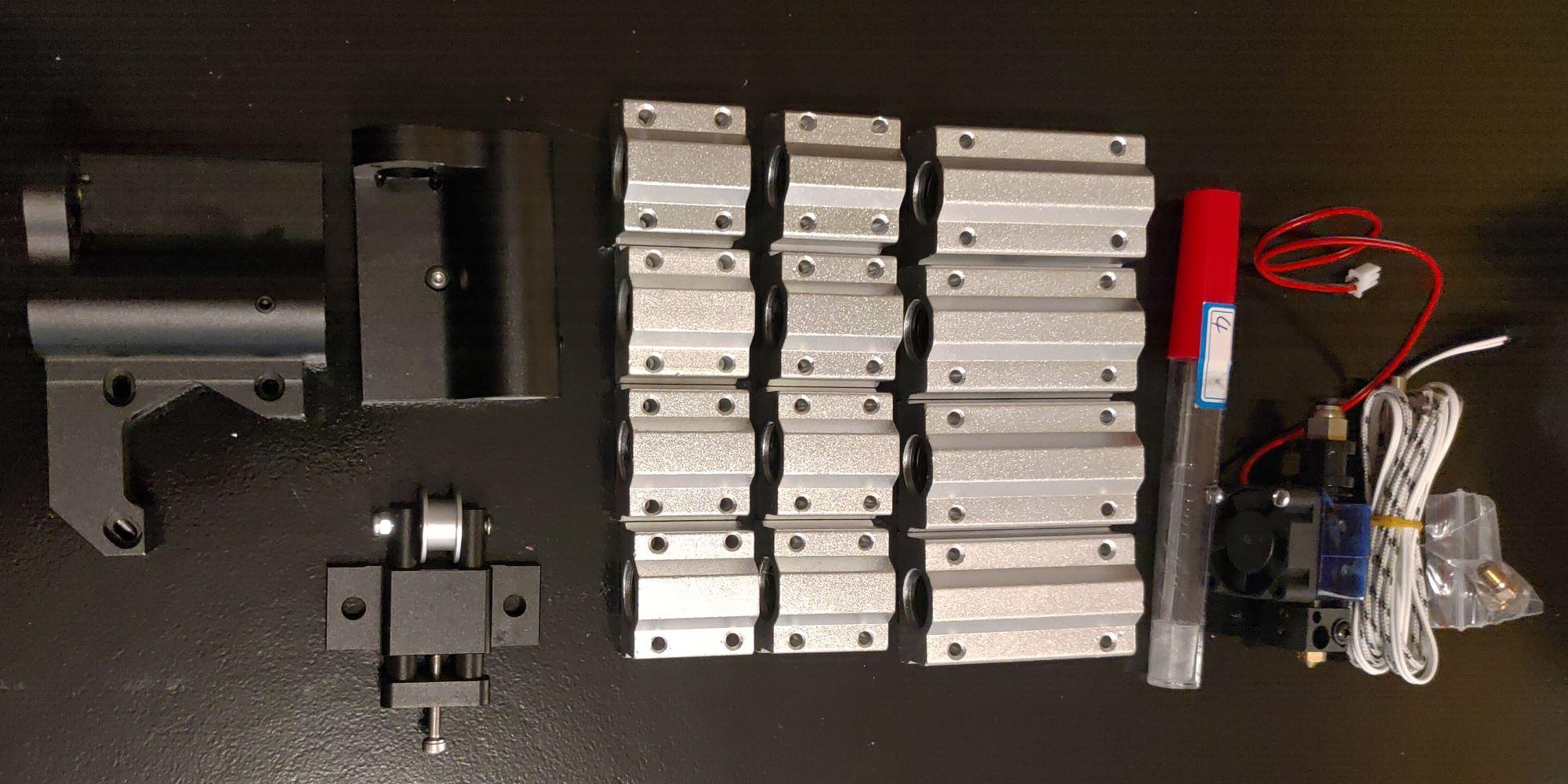
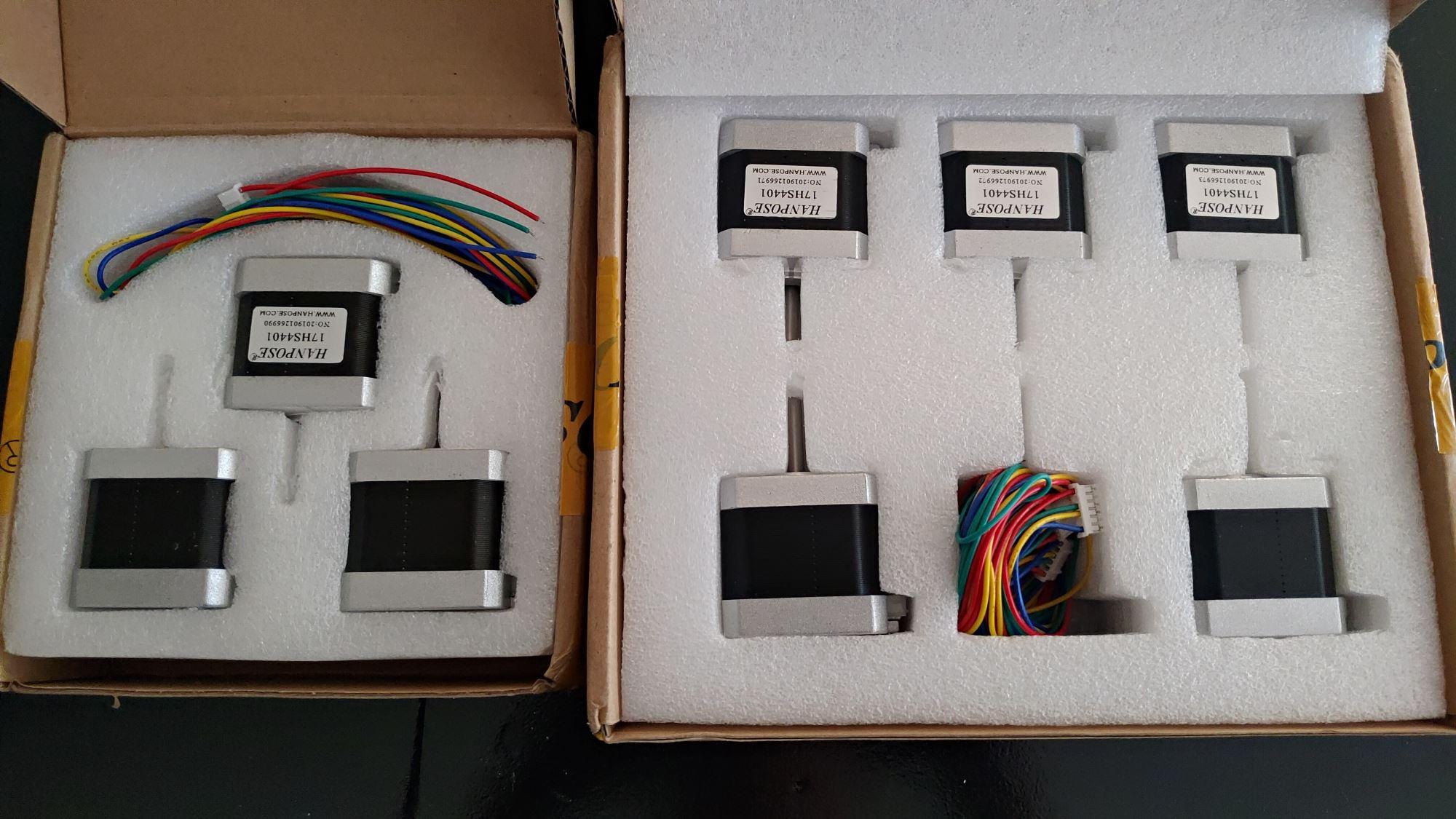
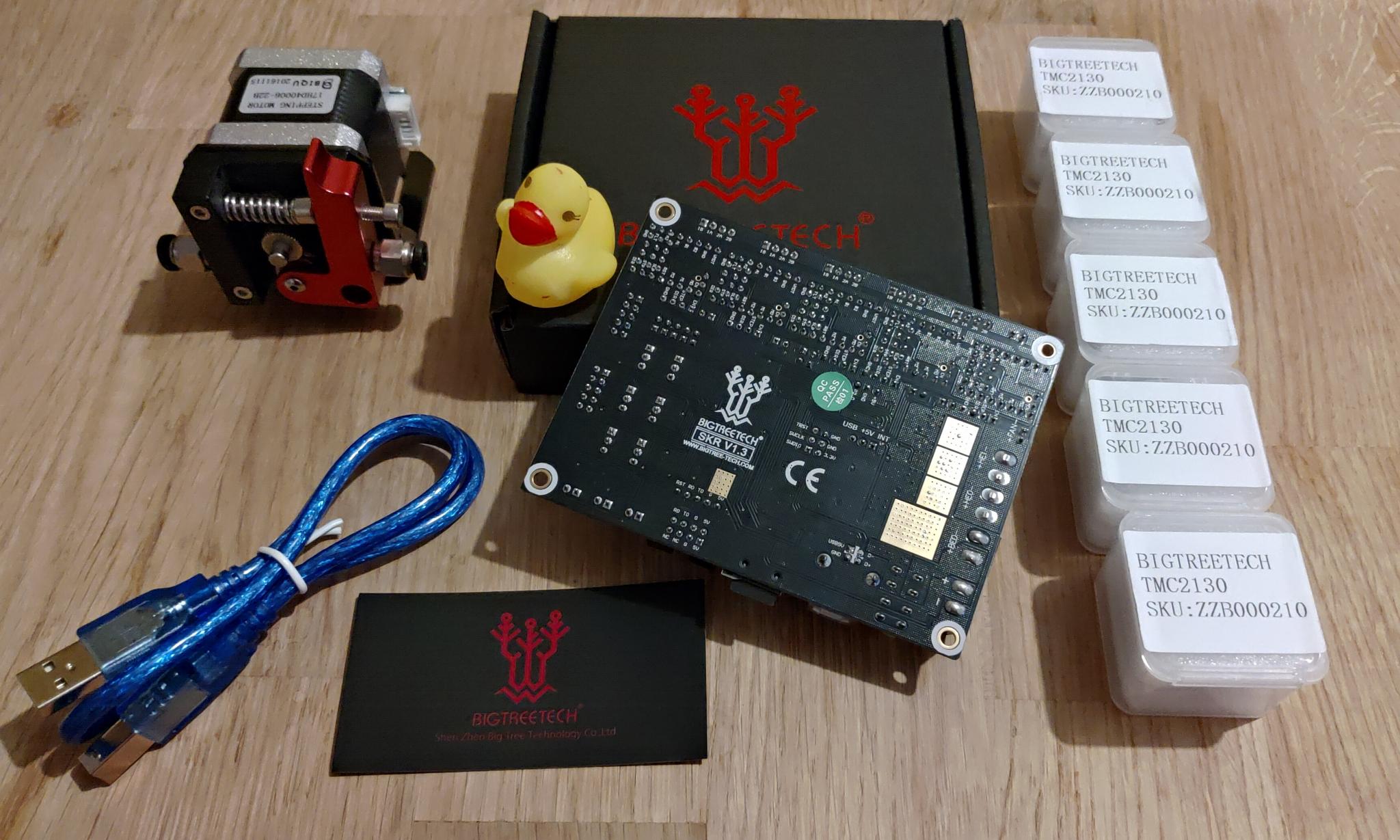
Petite mise à jour, je reçois le matériel petit à petit Je ne sais pas pourquoi ils ont mit un canard xD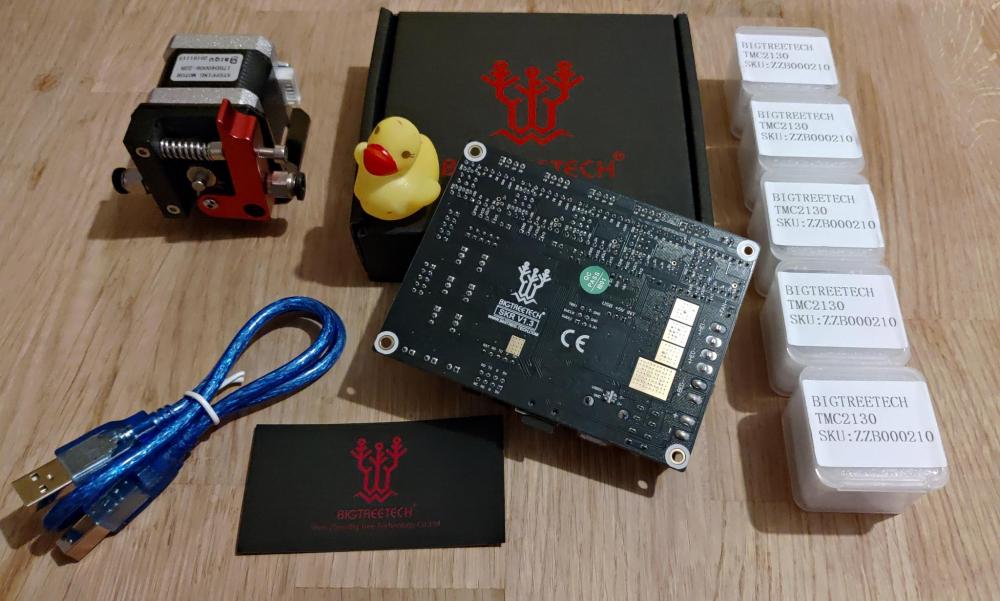
-
Imprimant a partir d'un chassi AM8 RatRig
EuReKaLoS en réponse au topic de EuReKaLoS dans Discussion
Hello bon dimanche a tous héhé. Petite update alors pour mon imprimante sur base de Chassis AM8 que je vais baptisé ER-8 (pour Eureka lol) Je suis donc partis sur ces composants la: Carte mère: BIGTREETECH SKR V1.3 Drivers: TMC2130 LCD: 12864 avec connectiques RAMP Extrudeur: MK8 (c'était moins cher de le prendre à parts) Moteur pas à pas: Nema17 17HS4401 Dissipateur et amortisseur: Nema Avec les mesure sur le chassis: Trapézoïde: T8 400mm Tige linéaire: 8mm de 400mm de long Je pense repartir sur du E3Dv6 par la suite, pas contre pour le bed je ne trouve pas de bed avec des points d'alimentation doublé comme sur le bed Anet (pour évité la chauffe et de cramé les câbles) -
Imprimant a partir d'un chassi AM8 RatRig
EuReKaLoS en réponse au topic de EuReKaLoS dans Discussion
Mais tu n'as pas changé le hardware et c'est ce que je cherche enfaîte Je cherche pas forcément le volume, juste le bon matos pour optimisé le châssis AM8 Exemple si par exemple il est plus judicieux de partir sur une carte mère Tango Et je me suis trompé je souhaité parlé de Klipper non pas Repetier