LLE
-
Compteur de contenus
41 -
Inscrit(e) le
-
Dernière visite
Récompenses de LLE
")





-
Limit switchs et Homing pour Alfawise C10 / CNC3018
LLE en réponse au topic de Anaximore dans Entraide : Questions/Réponses sur les CNC et Lasers
Hello, je ressors ce poste qui date un peu et je suppose que la réponse est trouvé mais cela peux toujours servir pour les autres Toutefois, voici ce que j'ai compris : $20 = Limite soft : Réglage de la limite du plateau avec les paramètres $130 pour x ,$131 pour y et $132 pour z $21 = Limite hard : Ce sera donc les fin de courses qui arrête le déplacement du plateau "EndStop" $22 = Homing : cette fonction permet , avec fin de course de délimité le 0 en x, y, z. $23 = Direction du homing. La valeur à indiquer permet d'avoir le sens de déplacement. * $23 = 0 (par défaut) : Le home se trouve en haut et à droite de la zone de travail * $23 = 1 : Le home se trouve en haut et à gauche de la zone de travail * $23 = 2 : Le home se trouve en bas et à droite de la zone de travail * $23 = 3 : Le home se trouve en bas et à gauche de la zone de travail * $23 = 4 : Là,je sèche, j'ai pô compris. $27 = Distance où le fin de course,ne sera plus actif. Pour faire le homing, tu passes $22=1 et $23 en fonction de ton origine. Pour info, la fonction de "rebond" est direct dans le cycle de Homing. Les paramètres $24 est la vitesse "rapide" et le paramètre $25 est la vitesse "lente". Tu as également le paramètre $26 qui permet de limité les "parasites" qui viendraient du contact. Le limite soft permet de ne pas déplacer la tête en dehors de la zone et bloque donc le déplacement si ce déplacement dépasse la zone de travail. Je n'ai pas testé les limites hard. Voilà, j'espère avoir été clair. Lien intéressant : https://github.com/gnea/grbl/wiki/Set-up-the-Homing-Cycle https://github.com/gnea/grbl/wiki/Grbl-v1.1-Configuration -
@jmarie3D l'idée de travailler sur un autre plan est une bonne idée à exploiter.
-
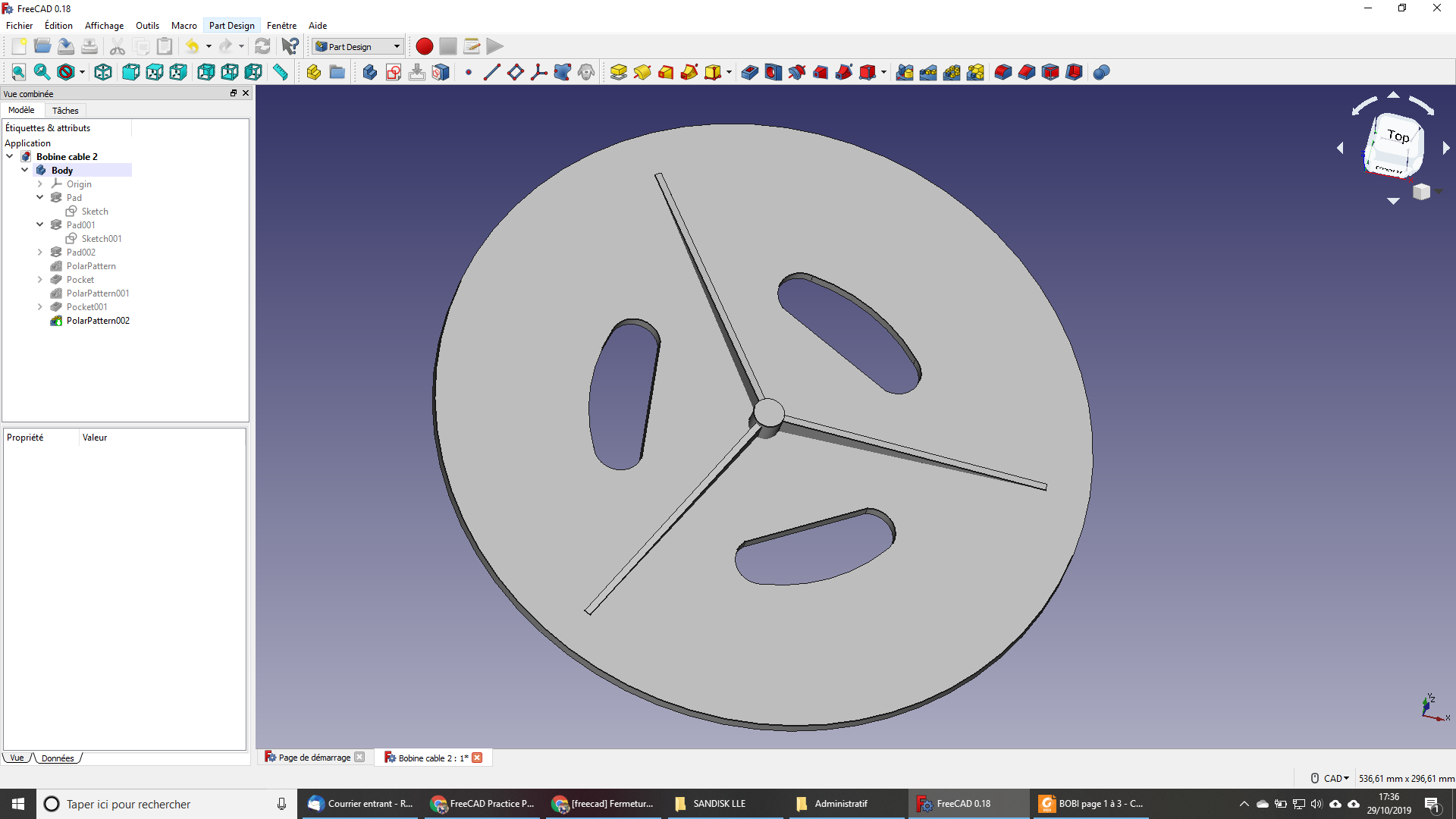
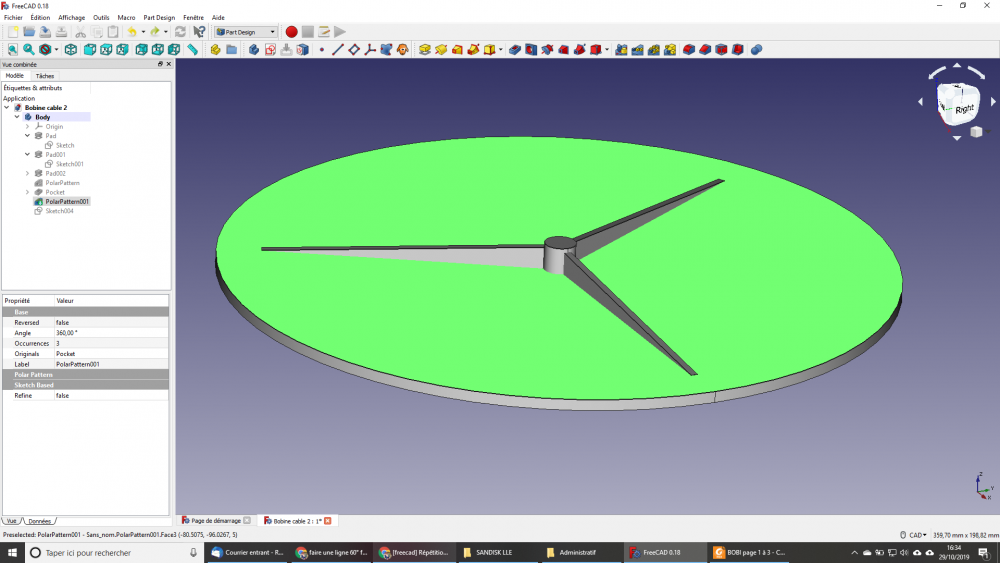
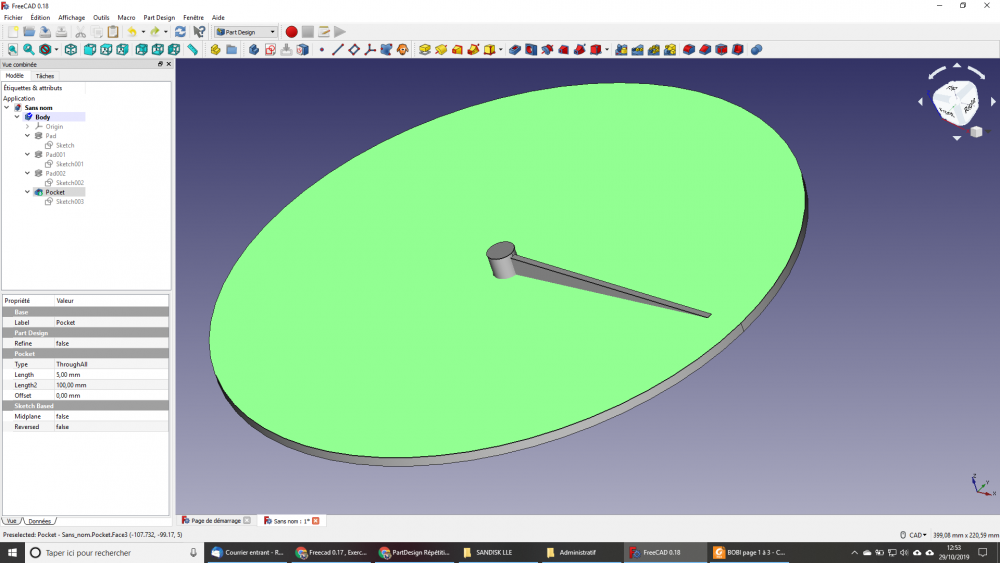
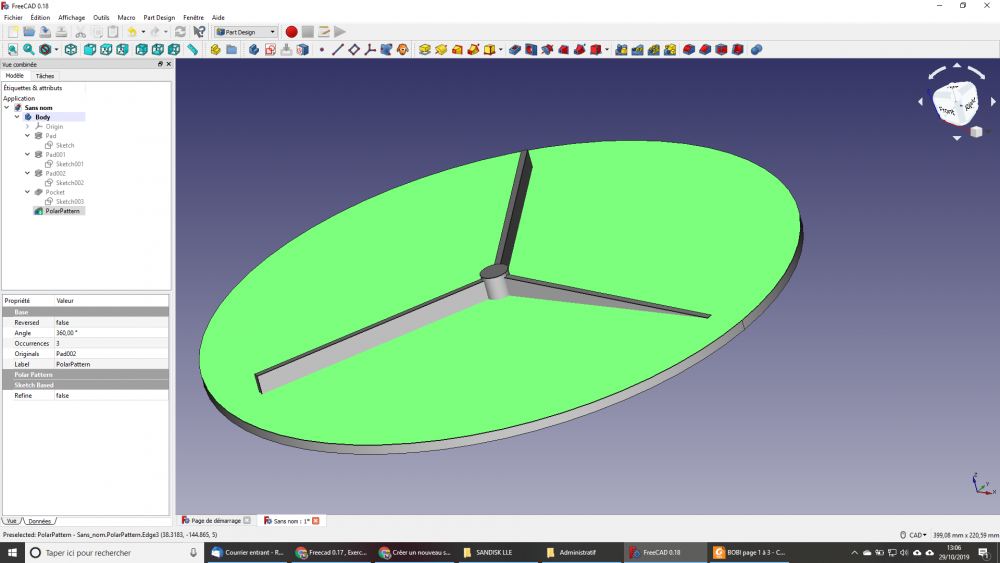
Bon aprèsquelques heures de recherches, j'ai réussi à faire ce que je voulais. Voici ma démarche : 1. j'ai fais une répétition circulaire avec mon rectangle seul : Ça j'y arrive. 2. j'ai créé la partie que je voulais enlevé sur 1 pièce comme sur l'image. 3. J'ai sélectionn2 la dernière action , ce qui m'a sélectionné toute ma pièce, et j'ai appliqué une répétition circulaire et ... HOP... c'est good.. Bon je sais pas si je suis très explicite mais je sais que quelques experts pourront préciser mes explications au besoin.
-
Bon, je dois être plus consciencieux et surtout réfléchir. En effet, je ne voyais pas que des point n’étaient pas liés. En faisant une contrainte "point" j'ai résolu le problème.
-
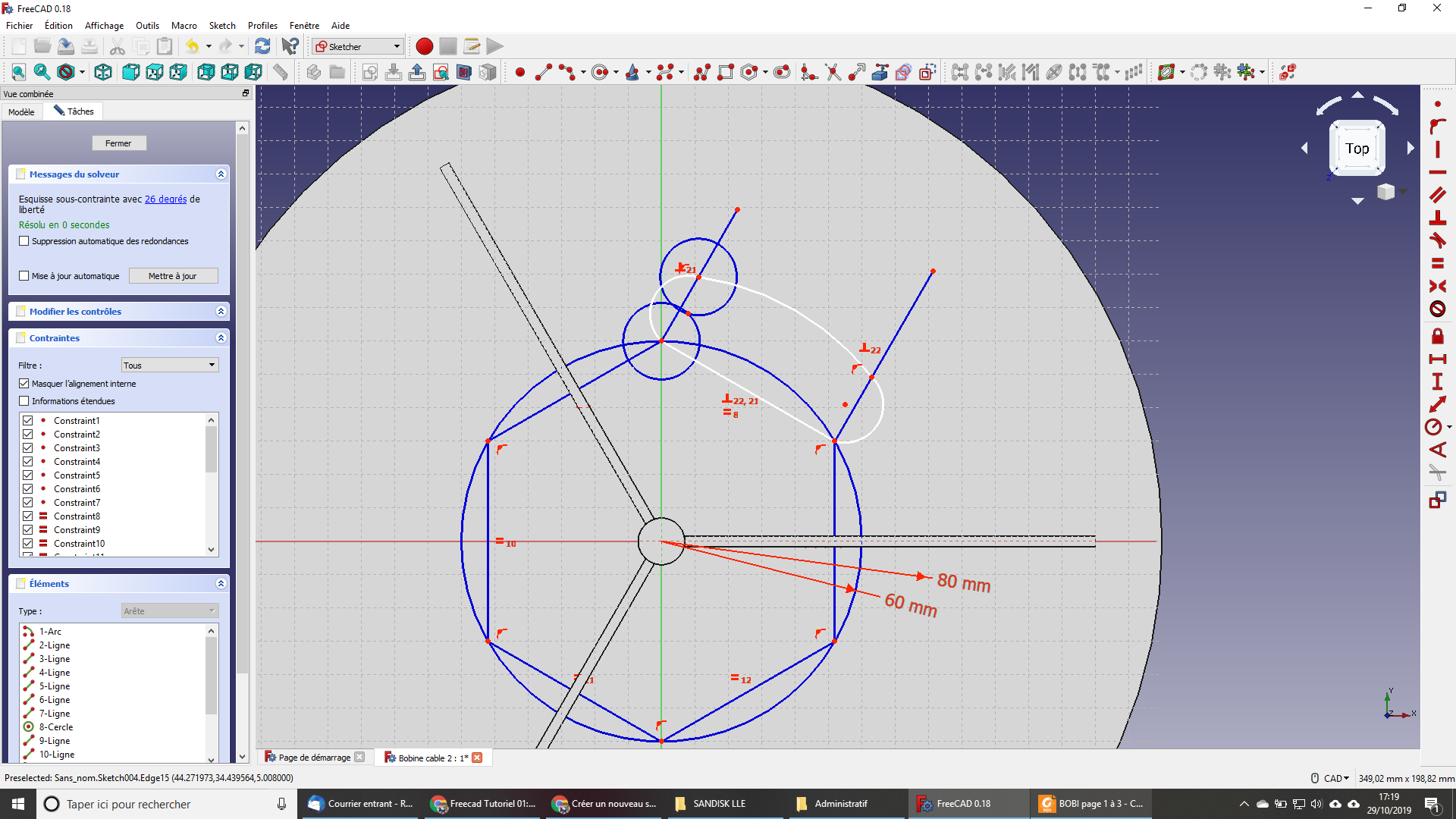
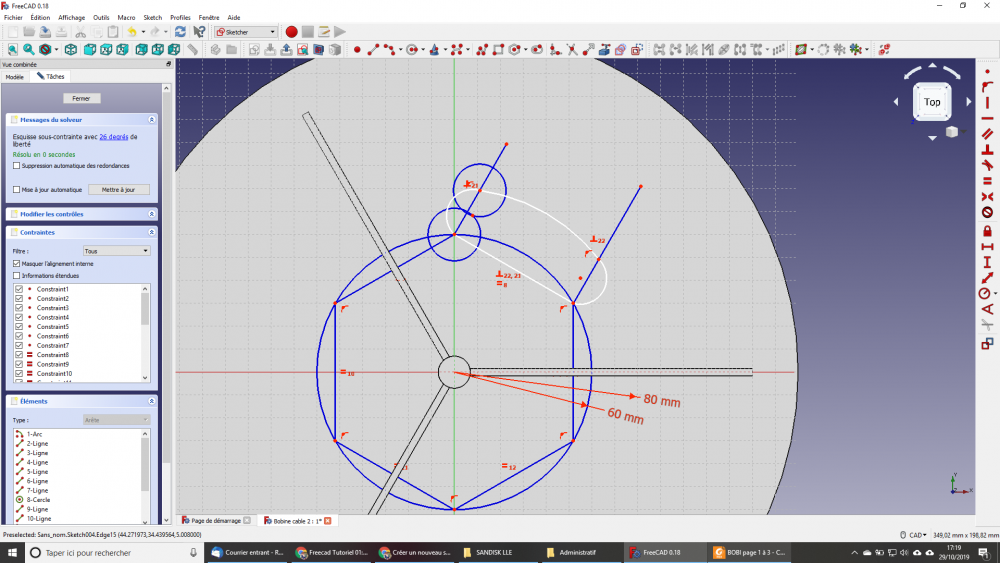
Bonjour,suite à mon sujet "Répétition circulaire", je poursuis ma modélisation et je suis une nouvelle fois en panne. J'ai dessiné une forme, avec plusieurs formes de base, et je n'arrive pas à la fermer pour en faire un cavité. Des idées ?? Bobine cable 2.FCStd
-
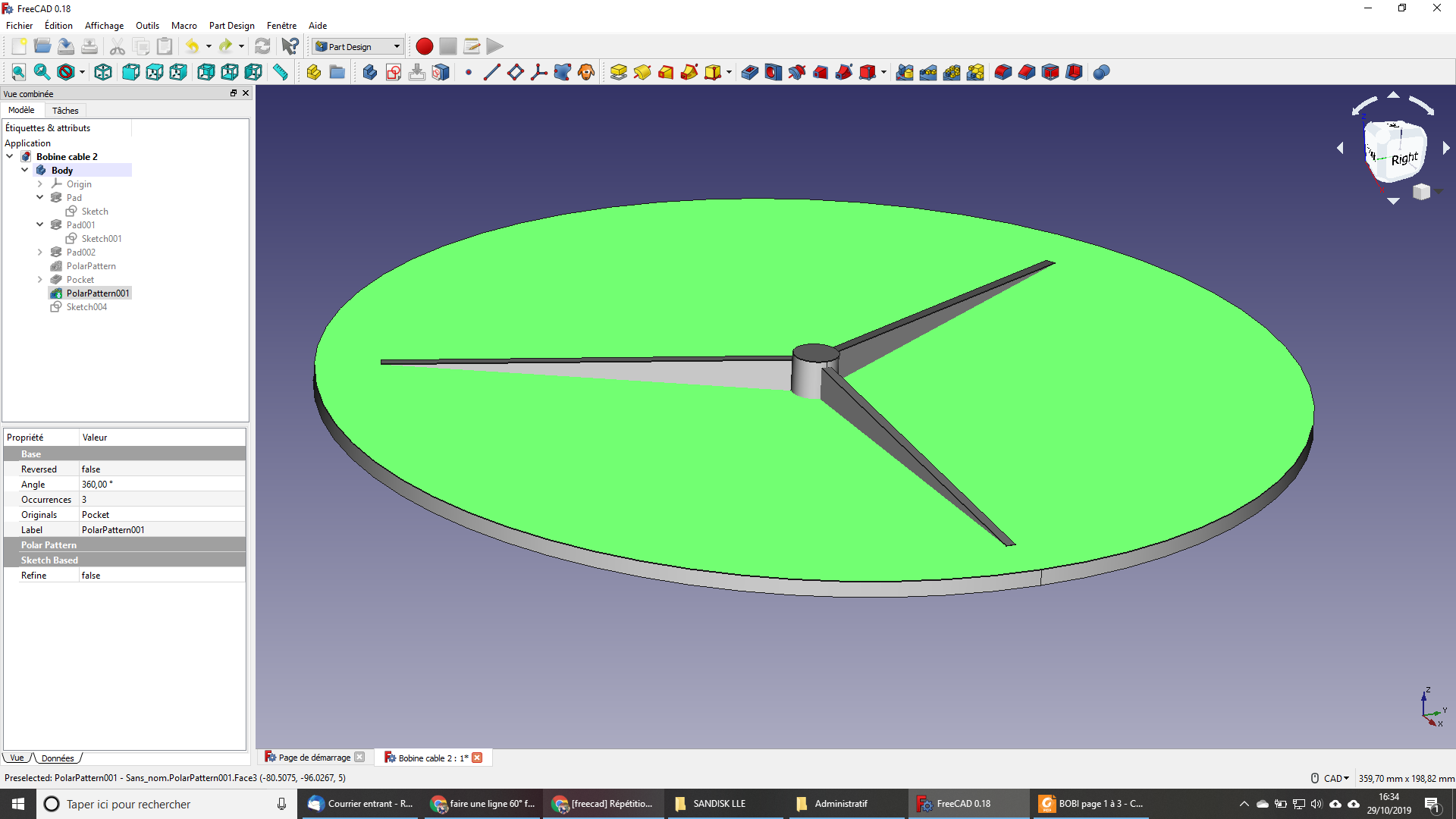
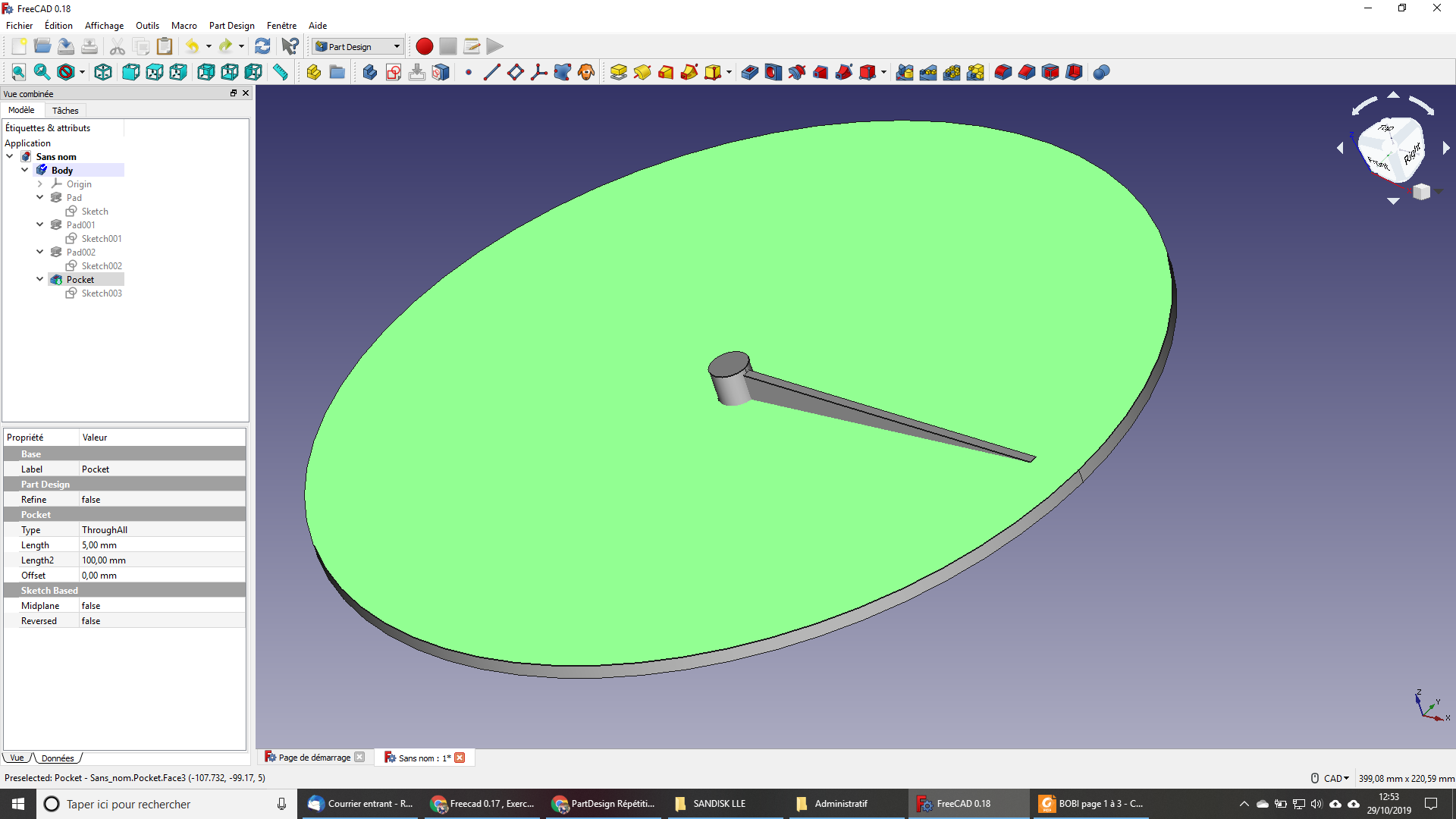
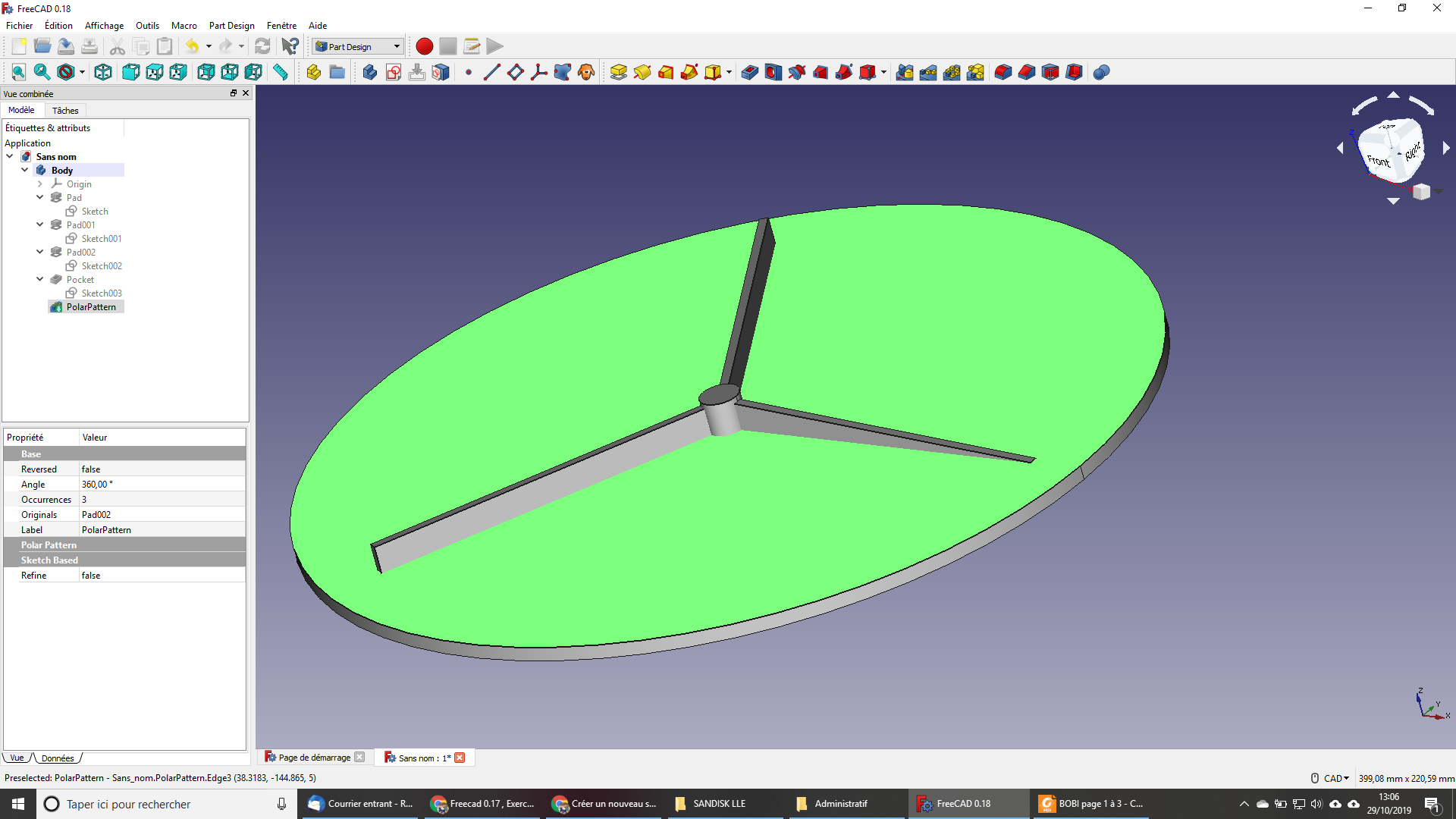
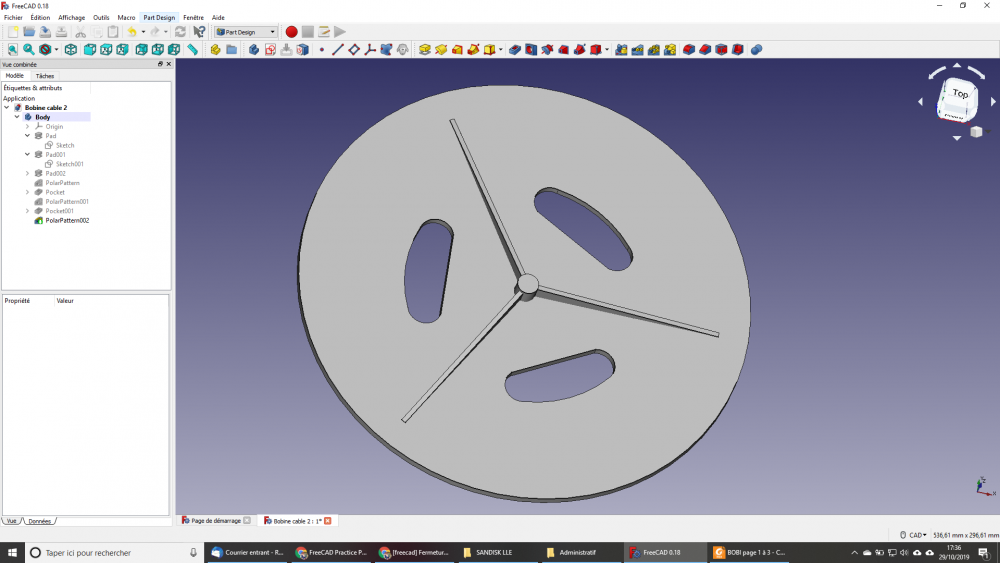
Bonjour, Je voudrais répéter une forme de façon circulaire. J'ai bien suivi la fonction répétition circulaire et sur une fonction "pocket" pas de souci.. Toutefois si vous regardé l'image, vous pouvez voir la forme que je souhaite répéter. Je me prends la tête et d'après ce que je vois , je dois ajouter une fonction. Je n'arrive pas à faire ça mais je ne désespère pas. A vos idées,merci beaucoup Bobine cable.FCStd
-
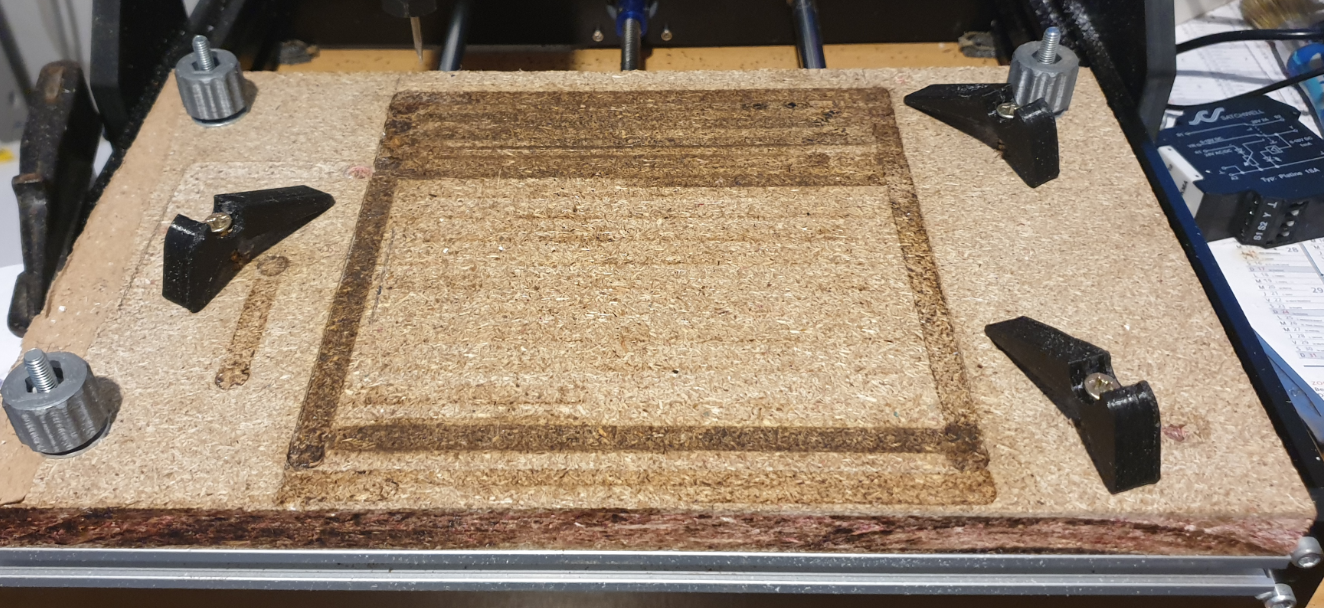
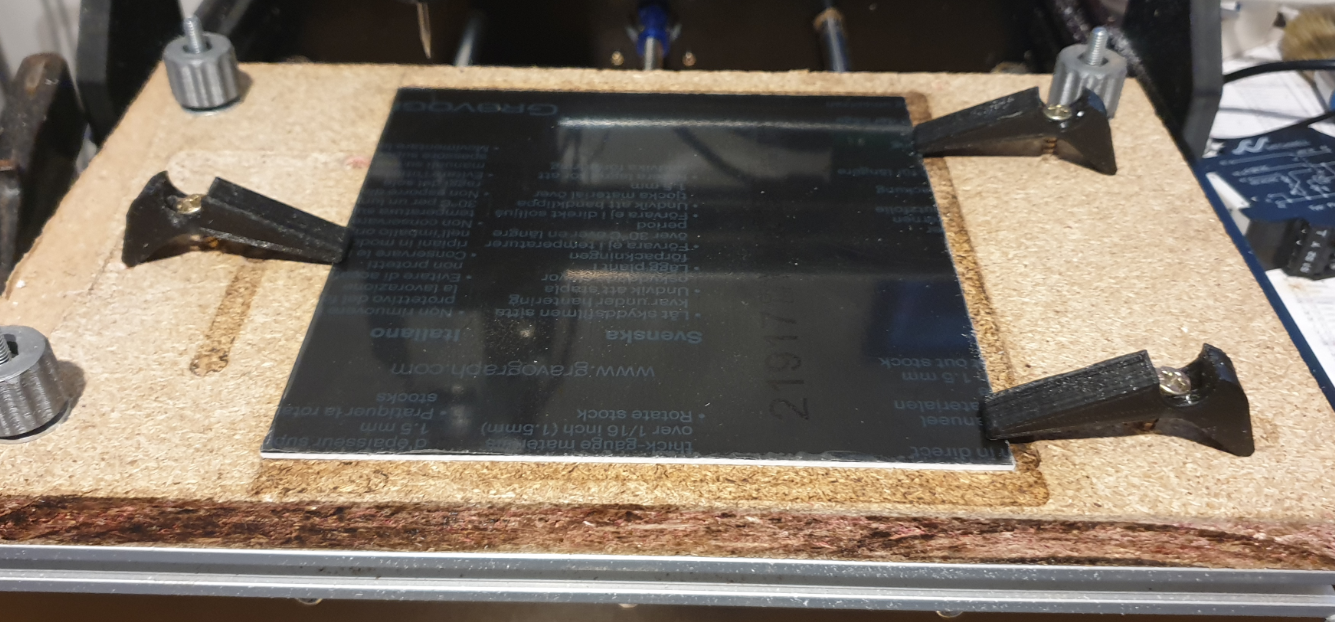
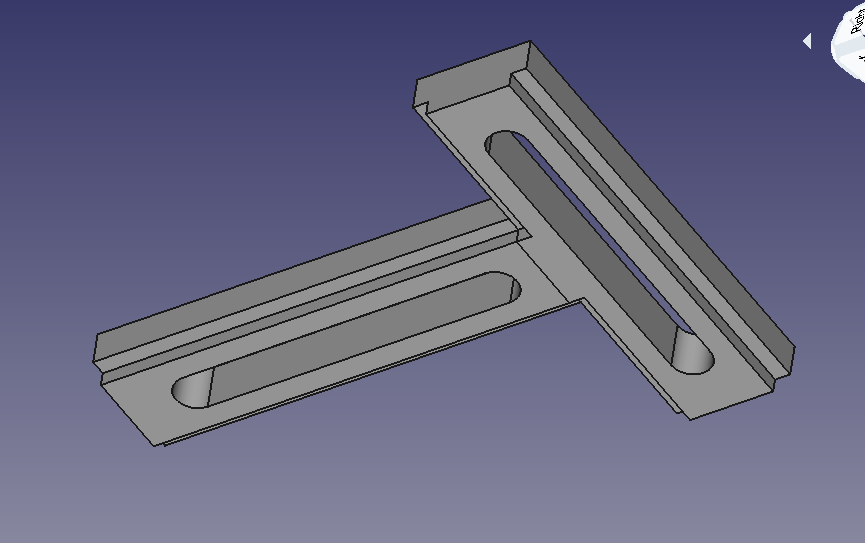
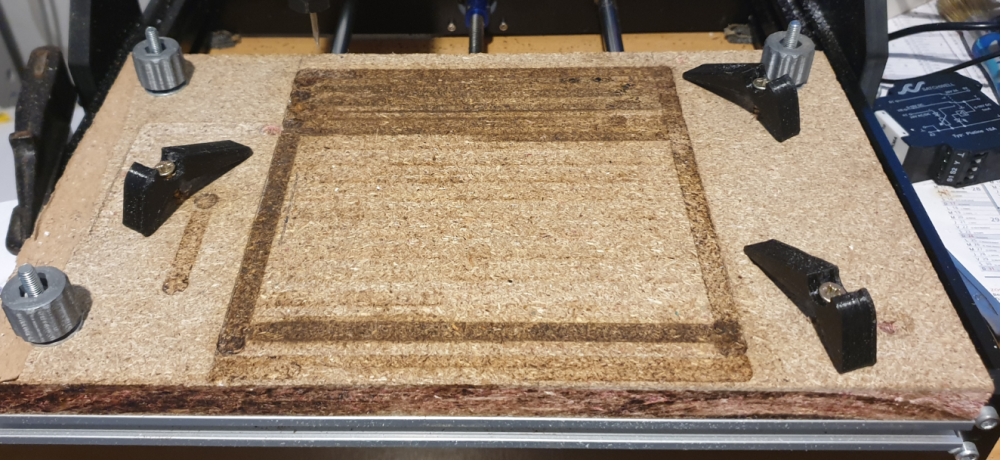
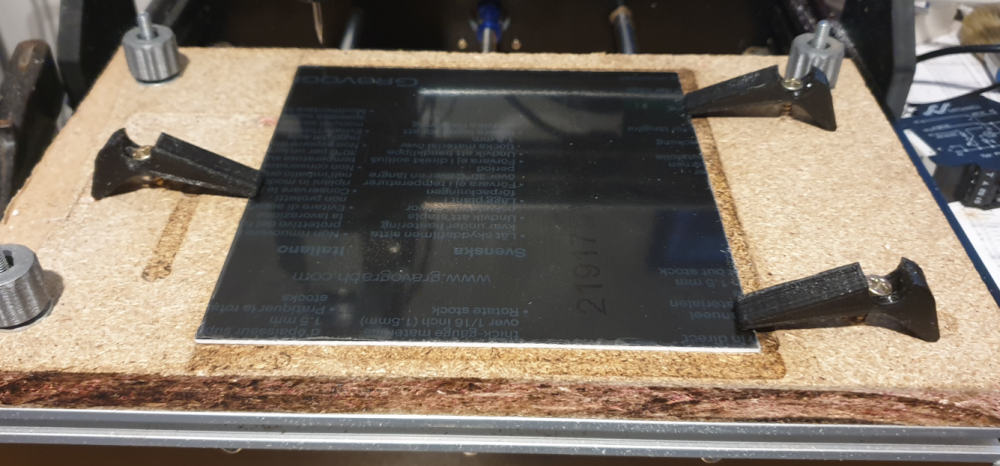
Oui , c'est du gravoply et j'en ai fais des étiquettes pourries. Aujourd'hui j'ai trouvé le bon paramétrage : Rotation 10000 Tr/min , Avance 300 mm/min, pénétration 100 mm/min, passe de 0,1 mm (je vais tenter 0,2 mm par la suite). Pour le maintien, je l'ai fait de 2 façons : 1. Avant le surfaçage. J'ai fait des pièces que j'i imprimé avec un "déport" de 2mm qui permet de bloquer la plaque (ci joint le fichier freecad). 2. Après surfaçage. Après le surfaçage de mon martyr, j'ai fais une zone de 150x150 pour positionner la plaque et je la maintien avec des "support classiques" Voila... Merci Vector pour le lien. Support T etiquettes CNC.FCStd
-
C'est effectivement , pour moi, ce qui est important, merci... Mais je note, et garde en en tête, tout de même les remarques de vector, tout est bon à prendre...
-
Je ferai donc attention la prochaine fois...
-
Merci pour la remarque vector et je suis soulagé que le trou est correct. Le cerveau humain est tellement fascinant...
-
L'idée n'est pas mauvaise effectivement, mais pour ma part, cela m'a beaucoup aidé. J'essaierai pourquoi pas cette méthode. Merci beaucoup Voici le résultat final...

-
Bonjour, Je reviens sur le sujet afin de vous donner des nouvelles suite à vos commentaires. Je suis surpris que mes réponses précédentes ne soient plus là. Est ce que j'ai oublié de valider ma réponse ?? on ne le saura jamais. Toutefois, mon dernier message vous remerciez de vos retour et de vos idées si simple et logique ! Je n'avais pas pensé à un surfaçage pour faire un martyr... Voici mon retour : Le surfaçage a été plus que laborieux et j'ai "bouffé" 2 fraises DREMEL diamètre 6 pour une surface de 150x150. Bon , c'est ma faute, j'ai lancé les passes à trop faible vitesse de rotation et du coup ma fraise a brûlé à cause du bois accumulé sous la fraise. En tout ça, c'était fait. J'ai relancé un essai de gravure sur plastique et c'est à ce moment que je me suis rendu compte de ma vitesse de rotation. Un petit passage dans Inkscape pour élaborer mes étiquettes et voilà le tout envoyé sur la machine.. Résultat : Super, j'ai enfin fini par avoir des étiquettes correctes !! voici une petite vidéo pour vous montrer.. Encore 1h30 de gravure et je vous envoi le résultat final !! Merci encore pour votre réactivitée et pour les excellent conseils prodigué. Cela prouve encore une fois qu'il y a plus d'idée dans plusieurs tête que dans une et que l'entraide et le fondement de la réussite... Seul on va plus vite, ensemble on va plus loin… Sans titre.avi
-
freecad Modélisation sur mauvais plan
LLE en réponse au topic de LLE dans Dessiner / modéliser en 3D
Ok , je comprends bien.. merki beaucoup pou tes réponses rapides... -
freecad Modélisation sur mauvais plan
LLE en réponse au topic de LLE dans Dessiner / modéliser en 3D
oups pas su bien exprimé.. sur ton Sketch001 tu as fais 2 carrés et c'est entre ces 2 carrés que tu as montes ?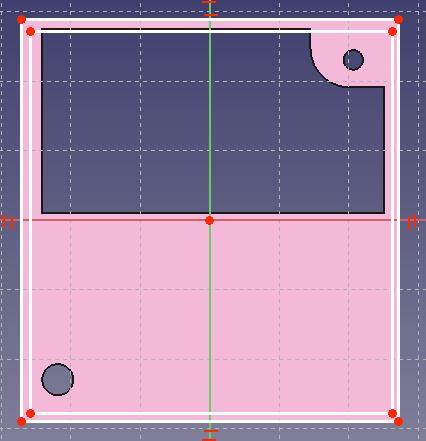
-
freecad Modélisation sur mauvais plan
LLE en réponse au topic de LLE dans Dessiner / modéliser en 3D
Ok , nickel... Merki pour cette solution. Une dernière question, c'est quoi la fonction pour faire une protrusion des 2 carrés ?