alain48
-
Compteur de contenus
15 -
Inscrit(e) le
-
Dernière visite
1 abonné

Récompenses de alain48
")





-
Problème Ghosting Creality CR 10 S5
alain48 en réponse au topic de miserovitch dans Discussion sur les imprimantes 3D
Merci pour avoir partagé le sujet et pour le lien. -
Problème Ghosting Creality CR 10 S5
alain48 en réponse au topic de miserovitch dans Discussion sur les imprimantes 3D
@miserovitch Oui, en audio je me débrouille mieux qu'en impression 3D Pour en revenir à ce que tu me disais, c'est tres intéressant. Cela semble confirmer que les vibrations sont renvoyées par le support. Une table moins rigide, n'est pas ici forcement un défaut sur ce point, parce-que ok elle donne une ref mécanique moins stable, mais aussi elle peut absorber vu sa plus faible impédance un peu les vibrations de la machine. Alors qu'une table rigide va les renvoyer dans celle ci. Je pense qu'il faut essayer de chercher dans l'amortissement et l'absorption maximum des vibrations et d'eviter leur reflexion. Les balles de squash sont un bon point de départ. On pourrait essayer de poser l'imprimante sur une surface absorbante comme un matelas de mousse par exemple. Un autre point qui me chagrine, c'est la grande distance entre les pieds quand on regarde l'imprimante de coté. Hors le poids du cadre vertical arrive au milieu ou les flexions sont maximales. Je me demande si je ne vais pas rajouter un support en dessous. Alors pas exactement un pied pour ne pas sur-contraindre, mais une sorte de silent bloc pour amortir les flexions et vibrations à cet endroit. Je vais chercher sur cette voie, parceque pour l'instant tous les termes de Jerk et autres paramètres dont tu parles c'est encore du chinois pour moi (mais ça viendra) De toutes façons, je pense que les causes sont multiples. @pascal_lb Oui je suis d'accord. J'imagine le Ghosting venant de la vibration résiduelle lié a une décélération brusque de la tête, lors d'un changement de direction. (il y a peut etre d'autres raisons) Pour reprendre le point de vue voiture, je verrais ça plutôt comme les rebonds après l'arret d'une grosse voiture américaine des années 60 sur ses suspensions apres un pilage brusque. Depuis on a fait des amortisseurs. Merci, je comprends mieux l’intérêt des TL Smoother. Le montage sur des CR 10 peut t'il améliorer les choses? Heuuu tant que l'on y est , ne serait t'il pas possible de scinder le sujet en deux s'il vous plait parce-que on est parti sur une autre direction . -
Problème Ghosting Creality CR 10 S5
alain48 en réponse au topic de miserovitch dans Discussion sur les imprimantes 3D
@pascal_lb Oui et non. Non, parce-que il semble que l'on soit dans un régime transitoire lors de changement brusque de direction. Ce régime transitoire , s’accompagne d’oscillations mécaniques du système. Ce qui pourrait se traduire par les ghostings. Oui parce-que justement, le régime transitoire est une grosse bête noire de électronique analogique lors d'amplification de hauts parleurs. En gros: quand un grand haut parleur avec un gros moteur reproduit un transitoire (par exemple un coup de grosse caisse), le mouvement mécanique violent de la membrane va renvoyer une tension contre électromotrice importante. Mais en plus il va naturellement osciller quelques temps. Et là de deux choses l'une : ou l'ampli est costaud et il va contrôler et amortir le HP et c'est OK. Ou l'ampli n'a pas les reins assez solide, et le HP va osciller quelques temps. ce qui va donner un son plutôt mou et manquant de grave. C'est la question que je me posais justement sur la capacité des moteurs /drivers de maitriser les oscillations après un mouvement rapide. Dans ce domaine là , je n'y connais pas grand chose. Mais si ça part du même principe, il faut savoir qui des drivers ou des moteurs sont les plus faible. Parceque si ce sont les drivers, changer les moteurs par de meilleurs risquerait d’être décevant, voire d'amplifier le défaut. @miserovitch Donc si j'ai bien compris : tu as testé sur une table branlante avec des balles pour amortir , et sans balle. puis sur le sol (que l'on va qualifier de lourd, et stable) avec et sans balle. Et le meilleurs résultat cela à été sur la table branlante avec les balles. c'est ça? Et après tu as renforcé la table, mais hormis confort acoustique, pas d’amélioration sensible. j'ai compris? -
Problème Ghosting Creality CR 10 S5
alain48 en réponse au topic de miserovitch dans Discussion sur les imprimantes 3D
@miserovitch Je ne comprends pas. Dans le message précédent tu as écrit que d'utiliser des balles de squash en amortisseur avait amélioré les choses? Donc une courroie Gate ne semble pas amener d’amélioration sensible ici. Bravo pour le faussage de l'axe de toutes façons, une courroie trop tendue ce n'est pas bon, ça fait forcer les roulements inutilement et les use prématurément. Je me suis posé la même question, c'est vraiment curieux effectivement. -
Problème Ghosting Creality CR 10 S5
alain48 en réponse au topic de miserovitch dans Discussion sur les imprimantes 3D
Je pars souvent en déplacement ces temps ci, et je n'ai pas pris avec moi mes codes de connections, (mais ç'est arrangé ) donc désolé pour encore cette réponse tardive. @miserovitch Pas mal l'idée de bloquer les vis de réglage et d'utiliser un BLtouch, je pense que j'en viendrais à cette solution tôt ou tard. Pour la contre réaction, c'est une idée en l'air. Comme je te dis je ne connais pas suffisamment le pilotage des moteurs pas à pas. Par contre je sais que ce fut un problème majeur dans l'amplification analogique de hauts parleurs, qui a fait (et fait encore) couler beaucoup d'encre dans les revues spécialisées et donné du fil à retordre au plus grands fabricants durant des décennies. Mais comme je te dis c'est pure spéculation de bazar de ma part. Les guides que tu as montré ont l'air sympa mais effectivement le prix fait réfléchir. Pour le support plateau que tu as montré c'est raisonnable par contre. Faut voir la proportion de gain de poids sur l'ensemble. Surtout que l'on est pas sur du résultat au final. Les balles de squash c'est encourageant. Si je ne me trompe pas, cela veut dire qu'il y a des vibrations dans le système. Quand l'imprimante est posée via ses pieds, elle est couplée a son support et si ce dernier à une impédance mécanique plus élevée qu'elle même (ce qui est presque toujours le cas), il se produit une réflexion à l'interface pied/support avec retour à l'envoyeur des ondes vibratoires. Le fait de mettre des balles, découple non seulement l’imprimante mais absorbe une partie de l’énergie de ces vibrations. C'est peut être une piste à creuser pour trouver le matériau qui amortira le plus . Peut être que les balles sont déjà au top, mais je me demande si avec un matériau plus souple encore on aurait pas mieux? je vais approfondir la question. +1 Pour les courroies, c'est peut être une autre piste. Parceque Si elle sont -même très très peu- élastique, cela suffirait à provoquer des artefacts. Gates, c'est une grosse marque dans le domaine depuis des décennies. Si ils ont pris cette marque (avec le surcout que cela provoque) ce n'est pas pour rien. @fran6p C'est clair que le plateau avec sa vitre est lourd. Sans compter l'objet à imprimer posé dessus. J'ai vu que certains ont imprimé une sorte d'équerre derrière leur moteur Y, ç'est utile? -
Problème Ghosting Creality CR 10 S5
alain48 en réponse au topic de miserovitch dans Discussion sur les imprimantes 3D
@miserovitch Effectivement, c'est bien visible. Pour la taille , ça doit surement jouer, mais j'en ai également avec ma Ender3 bien plus petite. As tu regardé au niveau du plateau? Je ne suis pas convaincu par le système de réglage en hauteur. Il fait son job sans probleme, mais cela induit une sacrée liaison souple entre le chariot et le plateau. Je peux le bouger sans trop forcer, même quand les ressorts sont raisonnablement sous tension. Je ne serais pas surpris que sur les mouvements Y, il n'y ait pas un léger balancement du à l'inertie. Je réfléchi à imprimer des pièces pour brider ce déplcement parasite en X/Y tout en permettant bien sur le réglage vertical. Je ne sais pas si ça va changer grand chose, mais ça sera plus "propre"niveau montage. j'ai vu que certains posaient leur imprimante sur silentbloc, avec des fortunes diverses quand au résultat. Une autre question mais là je n'y connais pas grand chose. Qu'en est t'il de la contre-réaction des moteurs pas à pas vis à vis des drivers? Elle semble assez importante, j'ai été surpris de constater que juste en bougeant le plateau, imprimante déconnectée du secteur, on arrive à allumer l’écran, jusqu’à allumer l'imprimante et faire apparaitre les menus. En fonctionnement, quand il y a un mouvement rapide, le moteur va également renvoyer une tension (d’où le terme contre -réaction) est ce que cela ne va pas perturber le fonctionnement des drivers qui vont avoir du mal à maitriser le fonctionnement du moteur pendant un court laps de temps? -
Tres beau test, avec beaucoup d'impressions, et d'essais.
-
Creality CR 10 S5, reglage de l'axe dual Z et renforcement
alain48 en réponse au topic de alain48 dans Discussion sur les imprimantes 3D
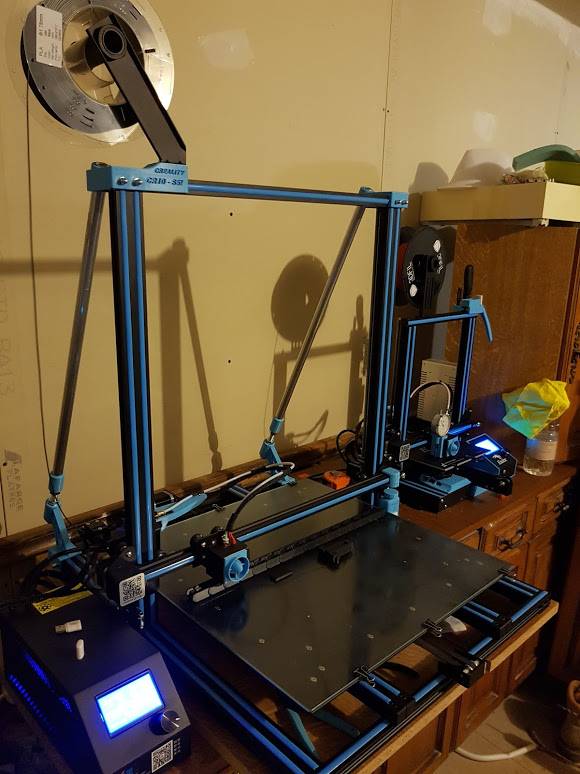
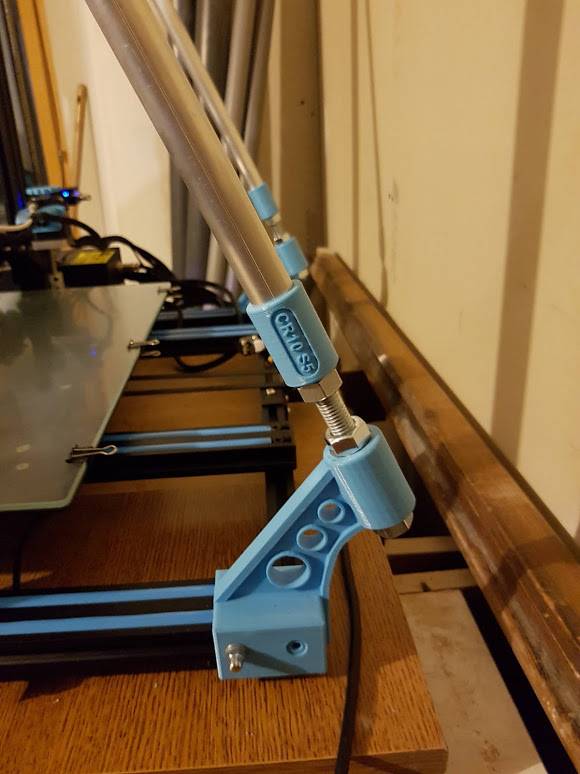
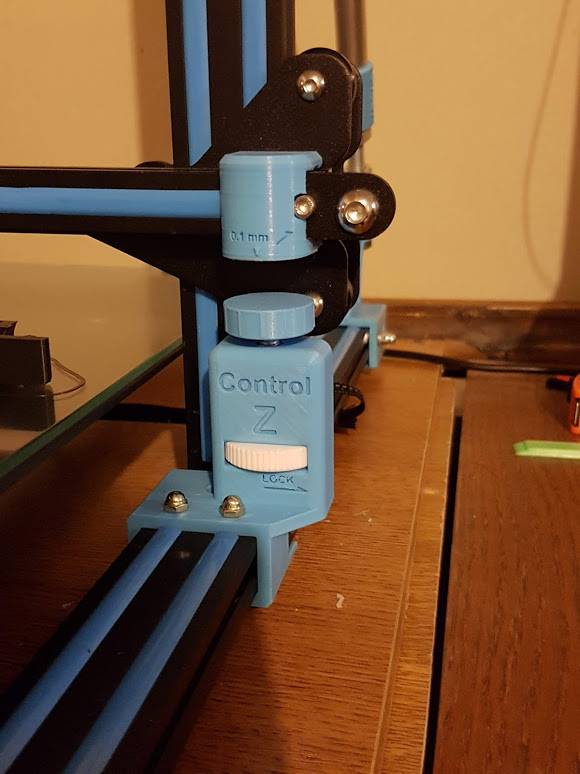
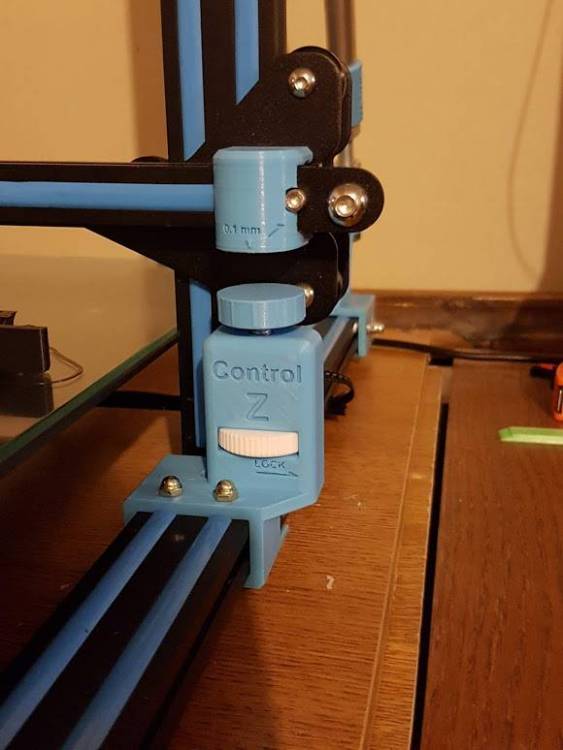
Désolé pour ma réponse tardive, j'ai eu un petit soucis technique et j'ai été quelques jours en déplacement. @Titi78, Merci . C'est amusant, j’étais parti moi aussi sur une idée de cales de calibrage pour la hauteur de l'axe X. Puis ensuite je me suis dis qu'une seule suffirait vu que la référence coté gauche est obtenue par le switch de butée. J'ai rajouté un réglage de hauteur sur cette cale, puis je l'ai fixée pour qu'elle soit toujours disponible...c'est comme ça qu'est né le Control Z. Faire un Gcode, c'est effectivement une très bonne idée, ça évite d'automatiser disable Steeper. Comment fais tu cela? C'est un petit fichier que tu laisses ensuite sur la carte SD? désolé si la question parait très simple, mais je suis encore débutant. Pour la synchro des axes Z, j'avais lu ton passionnant sujet sur ton imprimante. Mais comme je te l'ai dis c’est encore un peu complexe pour moi. Dans quelques mois, je pense que je partirais également sur cette solution. Mais le fait que les deux moteurs soient synchronises par une courroie, ça ne risque pas de faire forcer l'un par rapport à l'autre? Par contre je vais prochainement adopter ta solution de tendeur de l'axe X . @miserovitch, Merci aussi Tu parles de ghosting, sais tu d’où il viennent sur cette machine , et as tu pu trouver des solutions pour les atténuer? Pour la présentation de mes renforts, c’était justement prévu à la suite : Je reposte la vue globale de mon précédent message Ne trouvant pas de renforts pour cette imprimante, j'ai décidé de faire les miens que j'ai préféré les placer à l’arrière, pour mieux garder libre l’accès sur l'avant de la machine. Pour éviter d'avoir un angle trop fermé limitant la rigidité, j'ai un peu reculé et décalé vers le haut le point d'accroche des barres de renforts. J'y ai intégré des rondelles en acier pour donner une bonne portée aux écrous. En haut la fixation englobe les boitiers des roulements des vis de l'axe Z avec un épaulement en dessous pour prendre appui et fixé par deux vis à l'avant. Une empreinte permet de loger l’écrou frein du haut de la tige pour prendre un minimum de place. Car il y en a peu à cet endroit , surtout de l'autre coté ...mais ça passe. Justement de l'autre coté, j'ai fais un ou deux aménagement léger (désolé je n'ai pas de photos) pour laisser passer le levier de l'extrudeur. Je peux atteindre la cote Z=504mm, je ne perds pas de hauteur. Et j'ai rajouté un bossage sur la partie supérieure pour permettre à la bobine de passer aisément. Les bras de renforts sont constitués de tige filetée de 12mm de diamètre entourée d'un tube d'aluminium de 20mm. Ce dernier à un rôle surtout esthétique. Pour bien le centrer, Il y a une cuvette de 20mm de diamètre dans la fixation du haut et dans une pièce spéciale en bas (le petit cylindre ou il y a marqué "CR10-S53 sur la photo suivante. Le tube est ainsi pressé sur la fixation du haut grâce à l’écrou vissé contre cette pièce. Je peux alors solidariser l'ensemble avec deux écrous de part et d'autre de la fixation du bas. Ce qui permet de faire un réglage/serrage simple sans tirer sur la structure et risquer de la déformer. Les fournitures (écrous tige filetée et tube alu) se trouvent facilement en enseignes de bricolage. Si quelqu'un veut les fichiers je lui mets bien volontiers à disposition. J'y ai apporté quelques améliorations, notamment pour renforcer les fixations du bas pas assez solides à mon gout. @Miiras Titi t'a parfaitement répondu j'aurais pas dis mieux. Quand je tourne la vis de l'axe Z du coté gauche, je bloque en même temps celle du coté droit.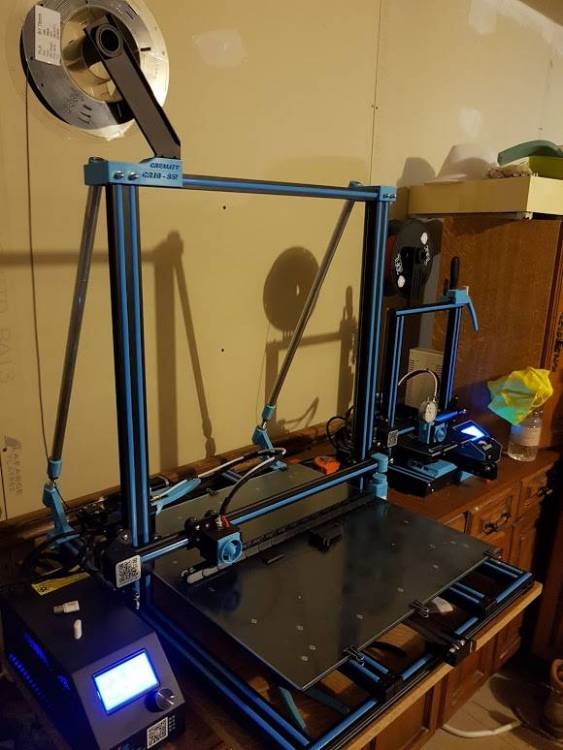




-
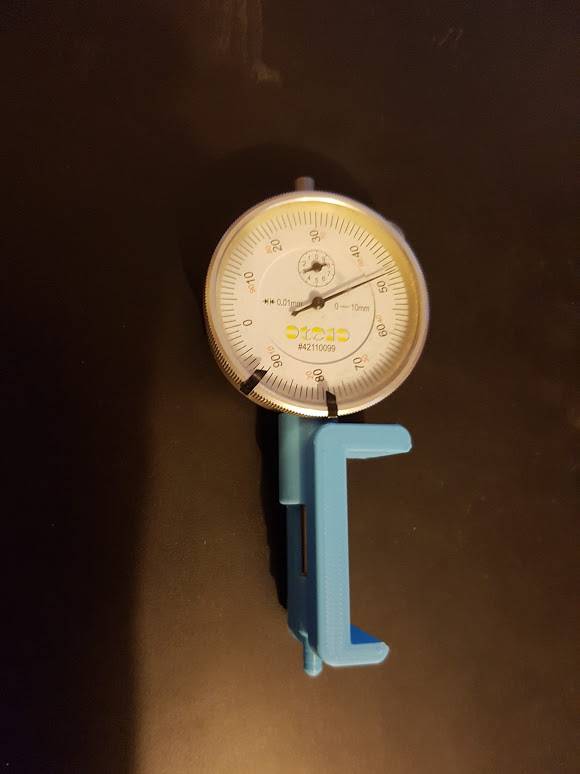
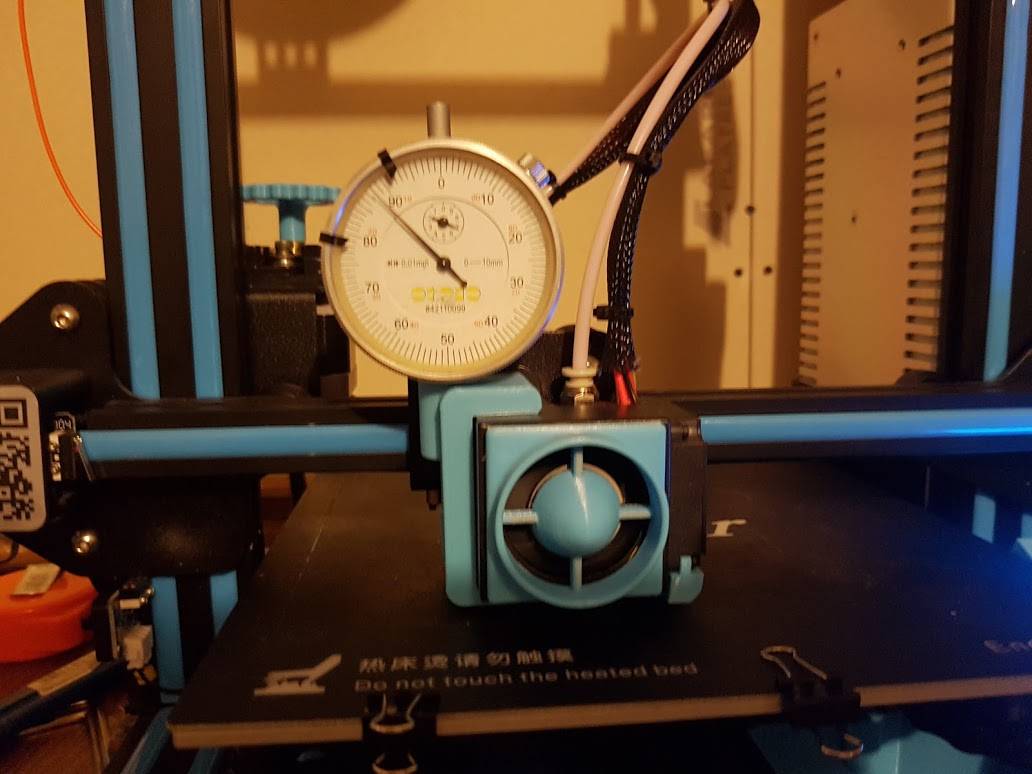
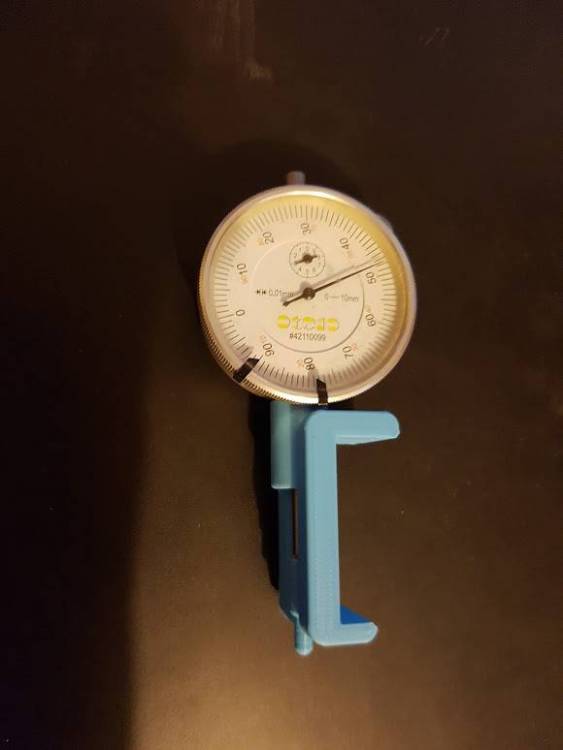
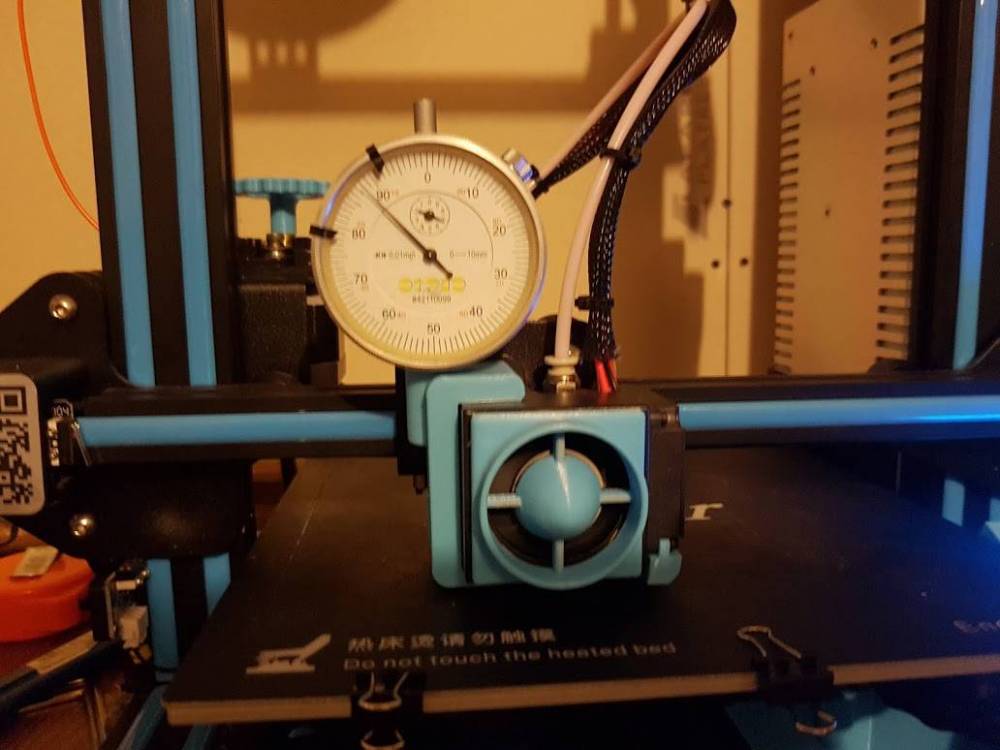
Bonjour, encore débutant dans le domaine de l'impression 3D, j'ai beaucoup appris grâce aux échanges sur le forum. j’apporte a mon tour une modeste contribution , désolé si certains termes techniques ne sont pas exacts . 1) Réglage du plateau. Sur un plateau standard d'une 20taine de cm type Ender 3 c'est déjà pas toujours facile alors sur un de 50cm.... En plus il n'est pas parfaitement plan. Et je n'arrivais pas en plus a obtenir un résultat fiable. Cela bougeait tout le temps. J'ai vite troqué la feuille de papier contre un petit montage que j'ai fais avec un comparateur à aiguille que je possédais. On peut aussi utiliser un comparateur numérique. C'est basique mais pratique cela permet de l'utiliser sur les deux imprimantes et se place en moins d'une seconde. Le voici sur la Ender3 j'ai fais la pince pour placer le palpeur au plus prés de la buse. Bien sur, il n'est est là que durant le réglage, pas pendant l'impression. Le réglage du plateau est bien plus rapide et simplifié. Je règle sur un écart de 15 centièmes de mm en moyenne. En gros entre (10 et 20) entre les deux curseur noir sur le cadran. Note ici le 15 est à gauche donc sur la graduation 85 (c'est plus simple avec un numérique). L'avantage c'est que l'on voit aussitôt l'effet produit par la rotation des vis sous plateau, et on sait vite ou on en est. C'est grâce à lui que j'ai vu que j'avais un soucis sur ma CR10, parce-que le réglage était très difficile et bougeait tous le temps. Notamment entre la droite et la gauche lié à un décalage de l'axe Z d’où la suite... 2) Décalage de l'axe Z Pour ceux qui en savent encore moins que moi, voici la principale raison. Sur l'axe vertical (Z), il y a sur cette imprimantes (et les autres CR 10 S) un double moteur : un de chaque coté. d’où l’appellation "dual Z" . Cela permet d’être sur que la traverse de l'axe X monte bien régulièrement des deux cotés. C'est donc en théorie un "plus" par rapport à des imprimantes plus petites comme la Ender 3 par exemple qui n'ont qu'un seul moteur. En théorie, parce que si ma Ender 3 fonctionne bien, ce n’était pas toujours le cas de la CR10S. Car si il y a deux moteurs...ils n'y a hélas qu'un seul driver. En gros ils reçoivent le même signal, il n'y a pas de correction si décalage car la carte mère est trop simple pour permettre cela. Il n'y a d'ailleurs qu'un seul contacteur du coté gauche pour vérifier le niveau . Donc c'est au petit bonheur la chance. Et les cause de décalages sont nombreuses, par exemple quand l'imprimante est éteinte les moteurs ne pilotent plus les axes qui sous son propre poids peut descendre plus d'un coté que de l'autre...etc etc... Quand on fait "un auto home", le coté gauche se recale sur le Switch...mais il n'y a aucun moyen de vérifier le coté droit. Et à l’œil difficile de s'en rendre compte. Il y a plusieurs méthodes mais souvent pas très simples à mettre en œuvre. A mon niveau du moins. Pour des membres plus chevronnés ce n'est sans doute pas un soucis. Par exemple, supprimer le moteur droit et relier les deux vis sans fin par une courroie pour les "synchroniser". C'est efficace mais compliqué , il faut acheter et rajouter des courroies des tendeurs, fabriquer des pièces de fixations, on perd un peu en hauteur totale. Puis autant utiliser les deux moteurs plutôt qu'un on a quand même plus de couple. J'ai utilisé une autre méthode. j'ai imprimé un petit accessoire fixé à l'imprimante qui permet de contrôler le niveau du Z à droite d’où son nom: "Control Z" parce-que j'aime bien les jeux de mots moyens. Le Principe est simple: c'est un petit plateau circulaire qui sert de référence. Quand on fait un "auto Home " la pièce bleue fixée sur l'axe des X doit venir se plaquer dessus. On voit aussitôt précisément si il y a un décalage. On le règle en tournant le plateau circulaire, ce qui change sa hauteur. Quand le réglage est fait on bloque le contre écrou avec la molette blanche. Note 1 : La pièce du dessus est conçue pour ne pas gêner le passage des courroies. J'ai du un peu la retoucher en la ponçant pour qu'elle arrive bien parallèle à la surface de contact. Le petit onglet indique que quand on tourne le plateau de une graduation vers la droite, il monte d'environ (je dis bien environ) de 0,1 mm. Note 2 : cela sert aussi de buté droite pour l'axe des Z. On pourrait craindre de faire forcer le moteur, mais en réalité ce coté là est souvent plus haut que l'autre, je n'ai rencontré aucun problème. Grace au "Control Z" j'ai vite remarqué que le coté droit avait tendance à vouloir systématiquement remonter ce qui expliquait les réglages erratiques du plateau. j'ai donc cherché ce qui provoquait cela. j'ai mesuré la hauteur de la barre des X en prenant comme origine les traverses...et j'ai trouvé un décalage de plus de 4mm entre la droite et la gauche! Cela provoquait une contrainte. Je l'ai replacée à l’horizontale et j'ai aussi un peu ré-réglé les galets coté droit. Le résultat ne s'est pas fait attendre: les réglages plateau ont tout de suite été plus stables. Procédure globale Réglage de base : je commence par le plateau je fais un ou plusieurs 'Auto home" et je fais un tour avec le comparateur, puis je règle le Control Z au contact. Je fais monter les axes, je fais un ou deux "Auto Home". je revérifie au "control Z" que le coté droit se replace bien et le niveau plateau. Je retouche si il faut, rapidement ça se stabilise. Et c'est OK. Controle de routine : je fais un auto Home. la pièce vient se coller au control Z, c'est OK. Il arrive rarement qu'il y ai un décalage. je fais alors "disable steppers" comme pour régler le plateau et je fais tourner la vis sans fin droite de l'axe Z pour revenir au contact. et c'est tout. Parfois il y a un leger réglage de plateau, mais en général il est bon. (un peu tordu mais bon ) J'ai juste du le refaire quand j'ai renforcé l'imprimante en montant les renforts latéraux, cela à du modifier un peu sa géométrie. C'est pour le prochain épisode. voici une photo en attendant: On voit les renforts et on distingue le "Control Z" en bas. N’hésitez pas si vous avez des questions ou remarques.
-
Bonjour et bonne année. Je me suis acheté pour Noel une Creality CR10-S5. Je me permet de vous donner le liens vers le site ou je l'ai acheté, parce-que 490€ avec le port offert c'est plutôt raisonnable pour cette imprimante. https://smartie.store/product/creality-3d-cr-10s5-3d-printer/ Je ne connaissais pas ce site. Je l'ai reçu, tous est impec. Mais le transport à été plus long que prévu (en grande partie a cause des gréves) Vu que le port était offert, j'ai testé également une bobine de filament PLA orange à 14€90. https://smartie.store/product/3dfil-dark-orange-pla-filament-1kg-1-75mm/ C'est correct, certes pas le meilleur filament que j'ai eu (je n'en connais pas beaucoup), mais il adhère bien au plateau et le orange que j'ai pris est sympa. Il à tendance à faire des micros fils un peu plus que les autres, mais pour des pièces simples il fait le job. Par contre la navigation sur leur site est un peu compliquée au début.
-
Vos impressions 3D de Noël 🎅🎄
alain48 en réponse au topic de Motard Geek dans Projets et impressions 3D
Ah, c'est tout mimi ça. -
Oui mais là ça dépasse carrément mes compétences de plusieurs niveaux. Mais merci tout de même.
-
Merci pour vos bonjours. Voila c'est ajouté. Au passage, je suis impressionné par le nombre d'imprimantes de certains.
-
Oui, ça fonctionne aussi. Seulement mon imprimante est à l’étage au dessous. Bien sur, je dois y descendre pour lancer l'impression, mais avec la carte SD cela m'oblige à y aller deux fois. Pour le post d'un an, je suis désolé, j'ai trouvé plus pratique de poster dans un sujet traitant déjà de la question plutôt que d' en ouvrir un autre avec le même thème. C'est ce que l'on demande en général sur les fora.
-
Ahh, je comprends mieux le pourquoi du rajout d'un Raspberry sur l'imprimante. Je viens de faire une petite recherche sur Octoprint. Merci