romano
-
Compteur de contenus
14 -
Inscrit(e) le
-
Dernière visite
Récompenses de romano
")





-
Buse 1mm ou 0.8mm versus 0.4mm
romano en réponse au topic de romano dans Discussion sur les imprimantes 3D
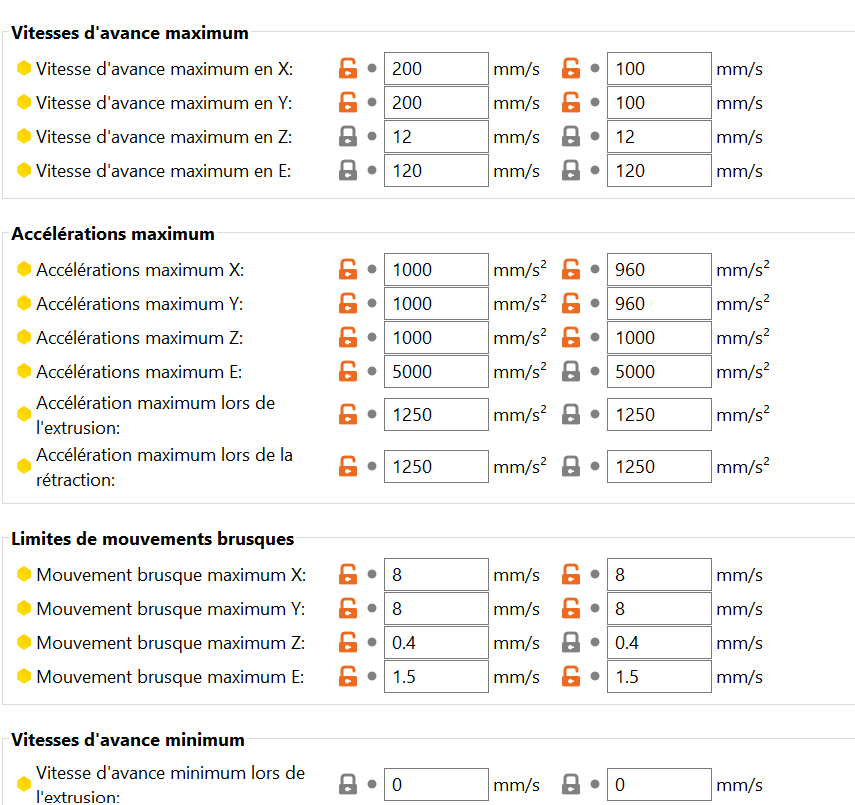
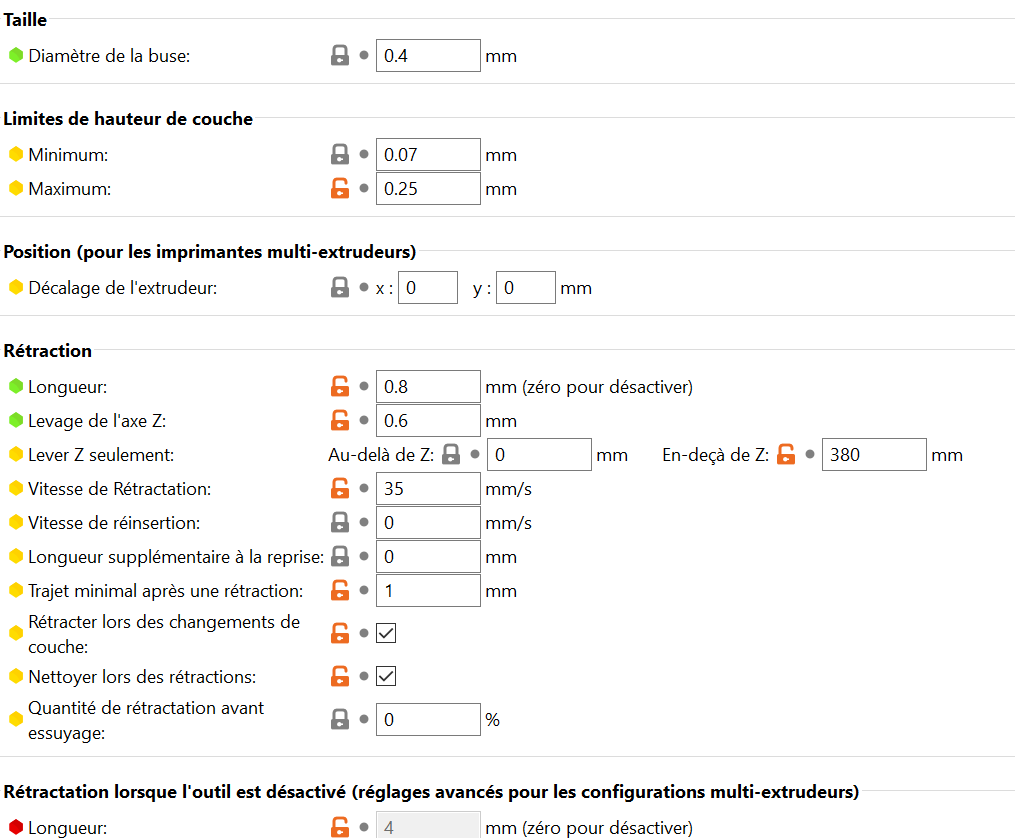
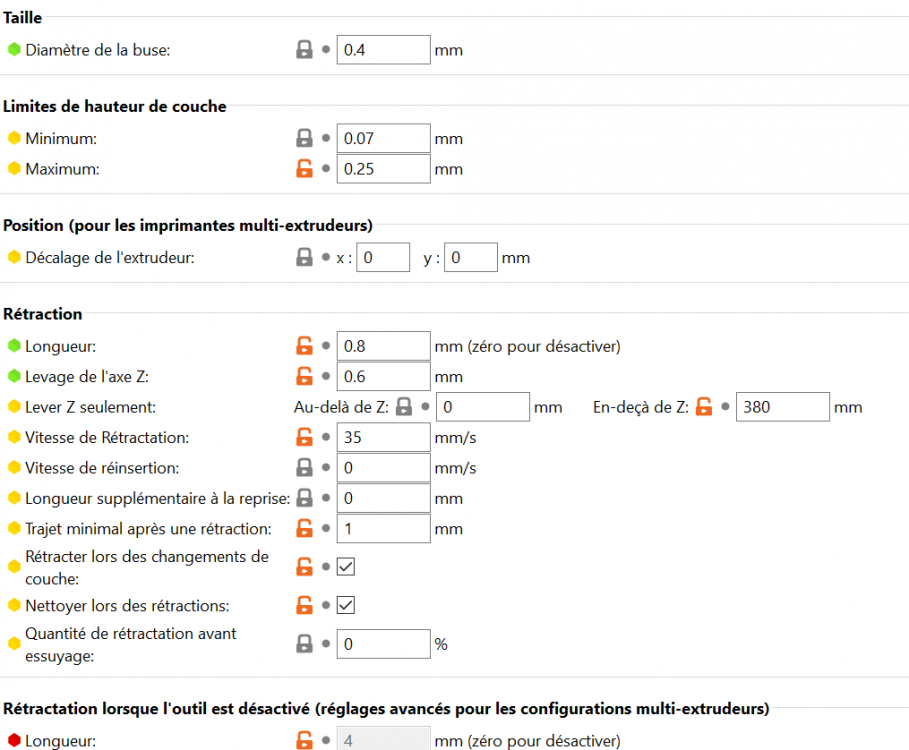
Comment les caractériser? Sans que cela prenne un temps infini... Idem pour le MVS comment le caractériser? Je ne vois pas où il se renseigne dans PS. En attendant, j'ai utilisé le fichier fourni avec le pack du fw Wagster pour X1. ce qui donne les données visibles sur les sshots en PJ de ce msg. ok cool.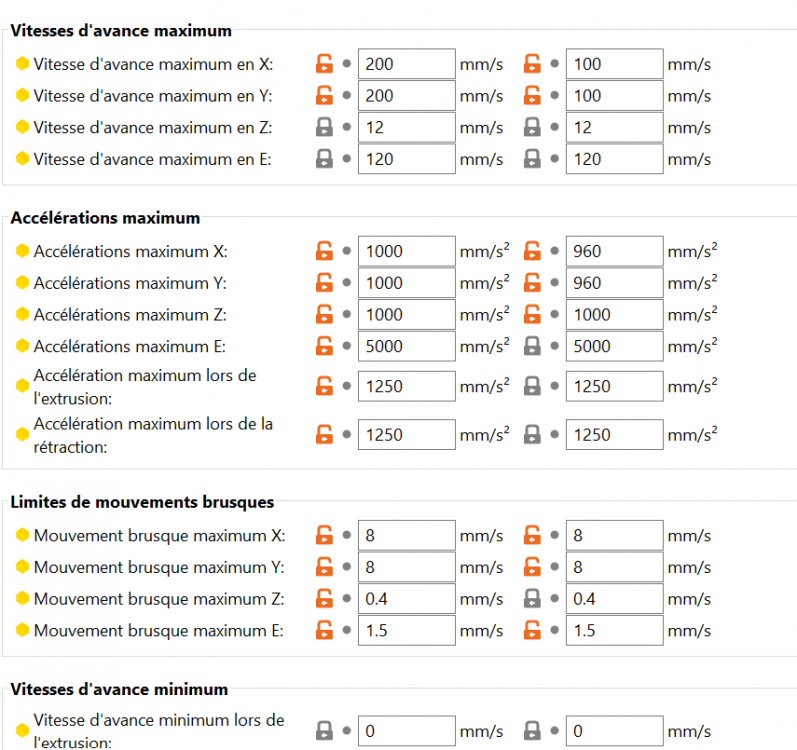
-
Buse 1mm ou 0.8mm versus 0.4mm
romano en réponse au topic de romano dans Discussion sur les imprimantes 3D
J'ai essayé d'appliquer ta méthode mais j'avoue que certains paramètres modifiés sont peu concret pour moi. Tel que: Onglets remplissage (solide ou pas): le % débit de remplissage reste à 100 mais le % de la largeur de ligne de remplissage peut passer, lui, à 200. Ca donne quoi en résultat? Entre autres. J'ai joué vite fait avec PrusaSlicer et ce soft le meme temps/conso que IDM une fois bidouillé. No comment... Le truc qui m'intéresse grandement sous IDM c'est les modifcateurs topologique. Indispensable pour renforcer des zones avec contraintes mécaniques localisés (vis, appui en compression pour joint...). Si vous savez me montrer la même chose sous PrusaSlicer... -
Buse 1mm ou 0.8mm versus 0.4mm
romano en réponse au topic de romano dans Discussion sur les imprimantes 3D
et du coup tu slices avec quoi? -
Buse 1mm ou 0.8mm versus 0.4mm
romano en réponse au topic de romano dans Discussion sur les imprimantes 3D
Pas de souci pour le pavé : difficile de traiter ce genre de sujet en 3 lignes! Je vais tout re-relire posément et ne manquerait pas de revenir avec quelques interrogations après avoir tenté de mettre en pratique tes conseils sous idm... -
Bonjour à tous, Je m'interroge sur les avantages/inconvénients de chaque dia. de buse. Dans les grandes lignes je sais juste que: - la 0.4 saura sortir plus de détails qu'une 0.8/1mm - les buses en 0.8/1mm réduisent grandement le temps d'impression En ayant joué avant les slicers (cura et ideamaker) je m'aperçois par exemple que les slices en 0.8mm me donnent une conso totale environ 2 fois supérieur malgré une simple coque/layer de 0.72 vs 2 coques/layer de 0.36 pour la config 0.4mm. Ce que je ne comprend toujours pas!!! Si vous aviez une explication pour ce dernier point et partager vos avis sur l'utilisation de "grosse" buse: ça serait utile à la communauté. Merci. Romain.
-
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
Ca ne déclenche pas trop de réactions... -
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
Comme demandé. -
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
Des photos de quoi en particulier ? La zone où sont les drivers? -
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
comment tu vois ca dans le retour au M122? quoi vérifier dans marlin? concernant le montage: tous les jumpers sont démontés. Ceux en-dessous des drivers et ceux liés au SPI. -
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
Je le refais ce soir et C&P ça dans le topic. Donc: >>> M122 SENDING:M122 axis:pwm_scale/curr_scale|flags|warncount X Y Z E Enabled false false false false Set current 800 800 800 800 RMS current 1436 1436 1436 1436 MAX current 2025 2025 2025 2025 Run current 25/31 25/31 25/31 25/31 Hold current 12/31 12/31 12/31 12/31 CS actual 0/31 0/31 0/31 0/31 PWM scale vsense 0=.325 0=.325 0=.325 0=.325 stealthChop false false false false msteps 256 256 256 256 tstep 0 0 0 0 PWM thresh. [mm/s] OT prewarn false false false false triggered OTP false false false false pwm scale sum 0 0 0 0 pwm scale auto 0 0 0 0 pwm offset auto 0 0 0 0 pwm grad auto 0 0 0 0 off time 0 0 0 0 blank time 16 16 16 16 hysteresis -end -3 -3 -3 -3 -start 1 1 1 1 Stallguard thrs uStep count 0 0 0 0 DRVSTATUS X Y Z E sg_result stst * * * * olb ola s2gb s2ga otpw ot 157C 150C 143C 120C s2vsa s2vsb Driver registers: X 0x00:00:00:00 Bad response! Y 0x00:00:00:00 Bad response! Z 0x00:00:00:00 Bad response! E 0x00:00:00:00 Bad response! Testing X connection... Error: All LOW Testing Y connection... Error: All LOW Testing Z connection... Error: All LOW Testing E connection... Error: All LOW -
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
je vais vérifier et essayer de mettre à jour si besoin. Ce que je ne pige pas c'est que le firmware est issu de ce qui est dispo sur le site de BTT pour cette SKR V1.3... -
SKR V1.3 AVEC TMC2208
romano en réponse au topic de romano dans Entraide : Questions/Réponses sur l'impression 3D
j'ai déjà suivi cette vidéo et tout était déjà OK. -
SKR V1.3 AVEC TMC2208
romano a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour a tous, Je viens de monter une skr v1.3 avec des TMC 2208 sur ma ender3. Après avoir flashé le firmware pour la mettre en concordance avec ma config matérielle vient le test des moteurs (retour origine et déplacements)... Et là c'est la cata : les distance ne sont pas respectées et les moteurs donnent des "à coups". Sans parler du bruit (mais la vidéo parle d'elle même!!!). J'ai vérifié les jumper, viré ceux dédiés au SPI, regardé le courant dans le firmware(0.8A), le nombre de pas est à 16... Si vous avez une idée : partagez car là... Je sèche ! Vidéo postée sur FB