Alexandre Cès
-
Compteur de contenus
14 -
Inscrit(e) le
-
Dernière visite
Récompenses de Alexandre Cès
")





-

probleme fichier STL
Alexandre Cès en réponse au topic de Alexandre Cès dans Entraide : Questions/Réponses sur l'impression 3D
Merci, je lai refait d'une autre manière et la aucune erreurs. Mais je note la méthode que tu ma donner car c’était exactement ça ! -
probleme fichier STL
Alexandre Cès en réponse au topic de Alexandre Cès dans Entraide : Questions/Réponses sur l'impression 3D
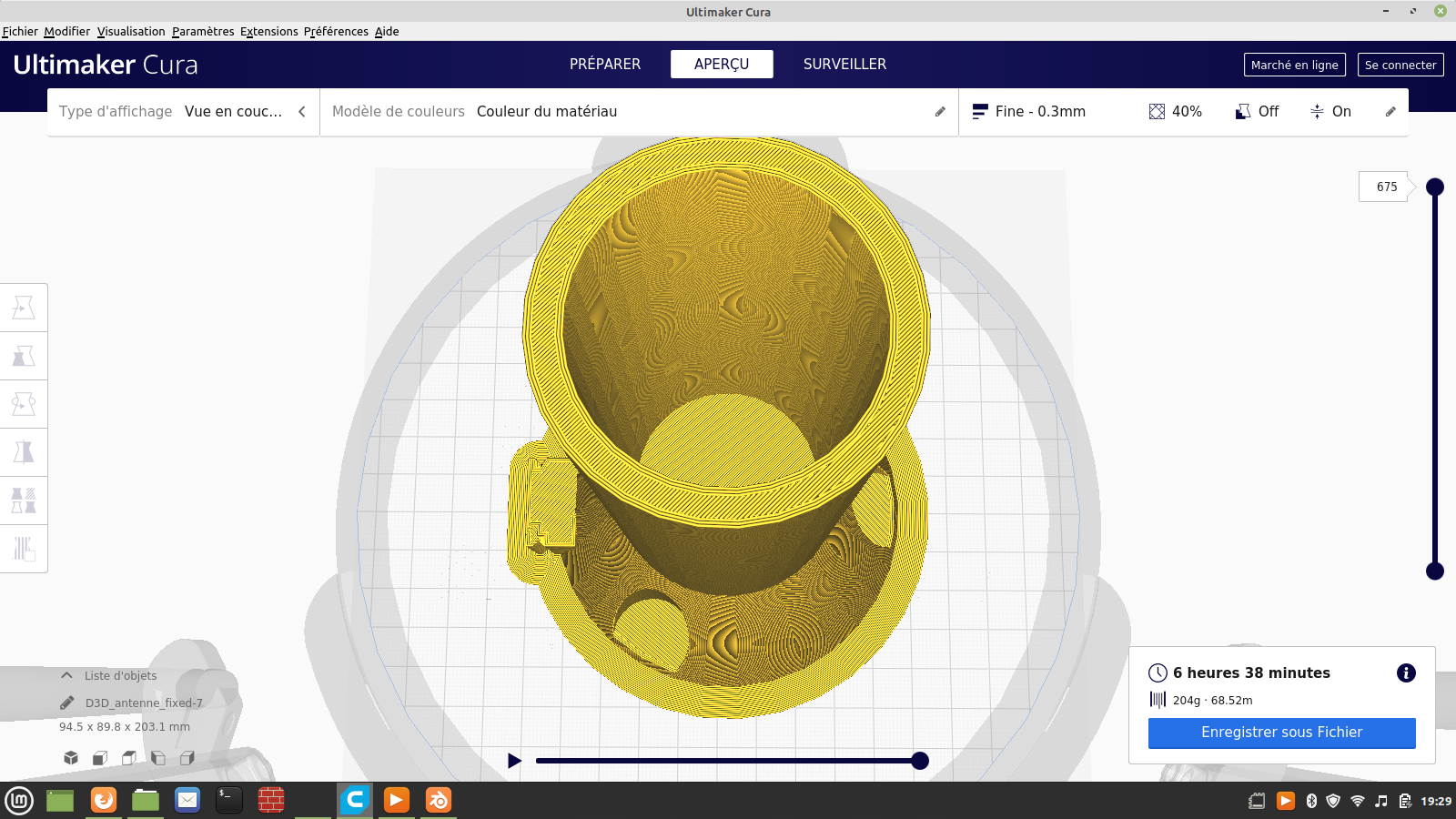
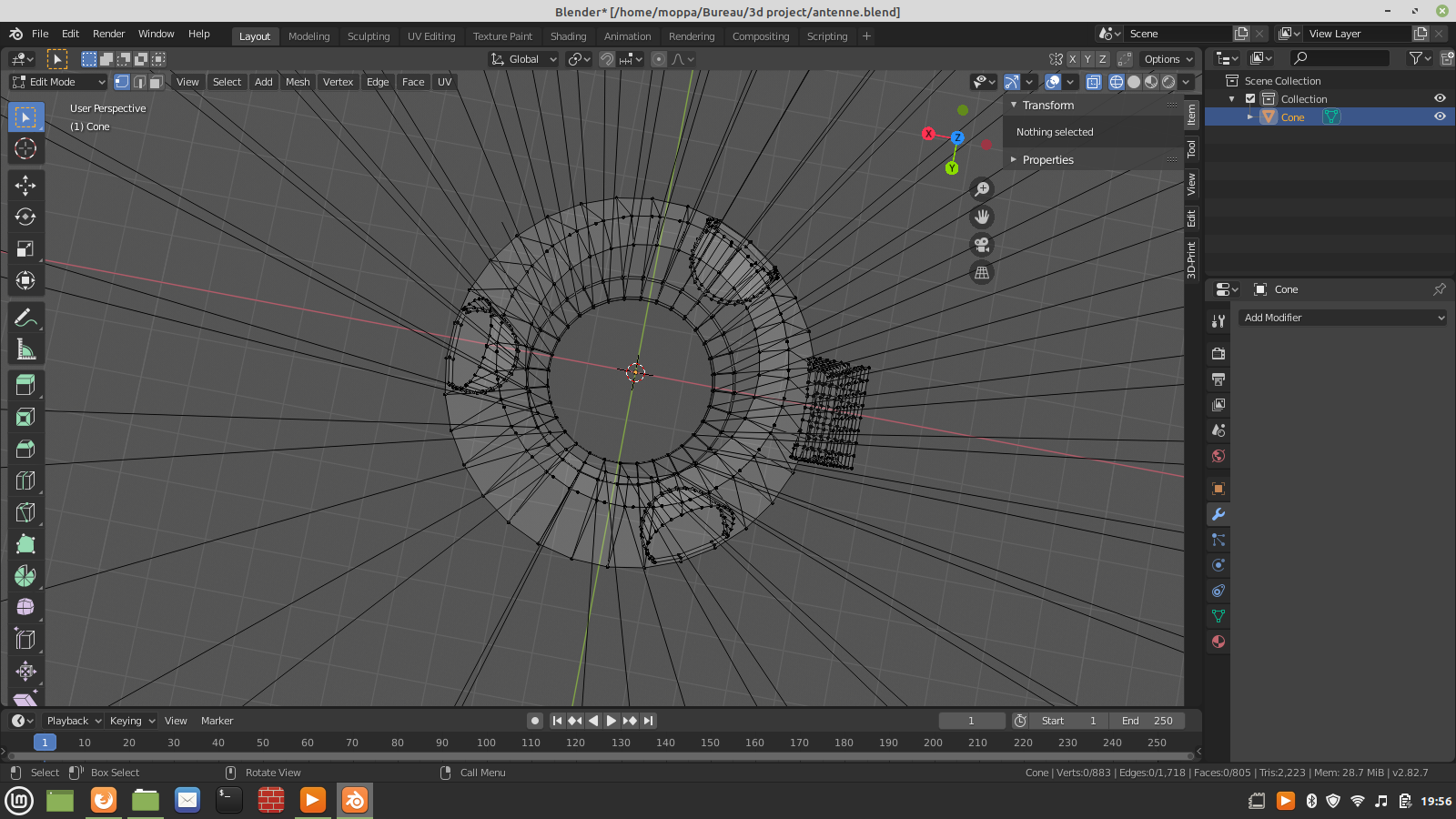
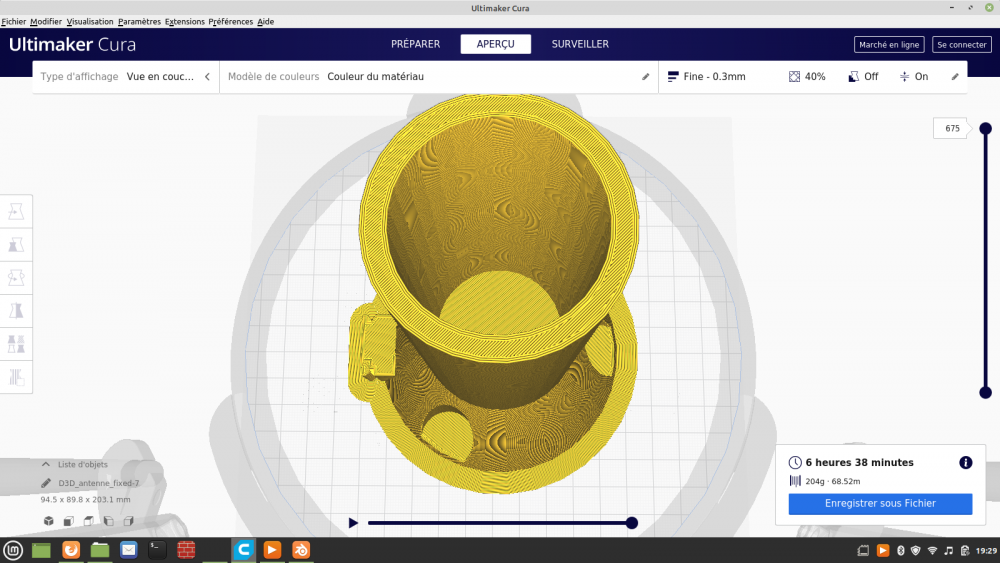
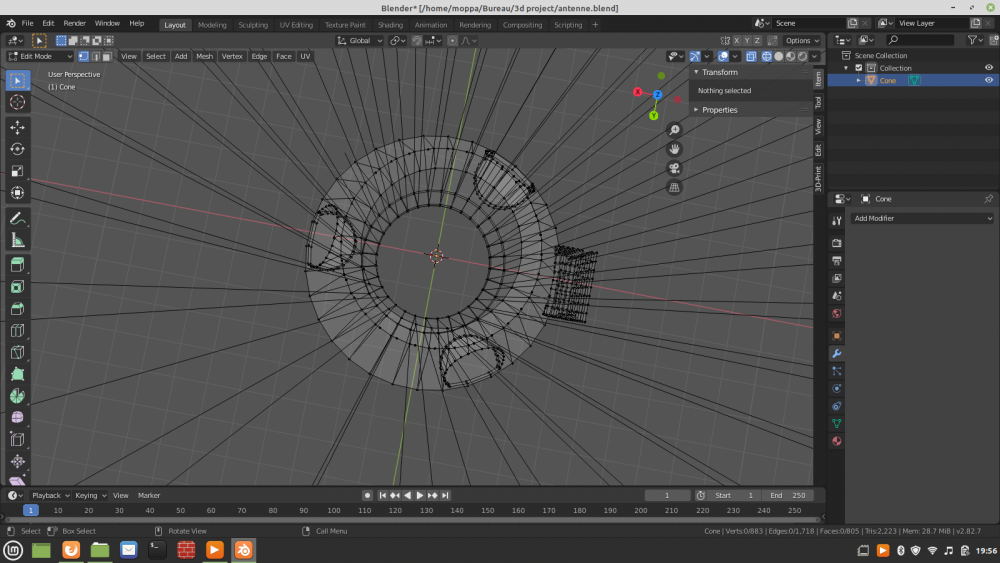
Bonjour, j'en ai refait un avec blender(un peut plus petit) je ferme bien tous et je vérifie encore et je corrige avec Netfabb, mais le problème reste. Une partie le tube est correcte mais la partie du cône, il y un pleins alors qu'il est censé être un tube au centre. De la couche 1 a 200 c'est plein alors qu'il y a le tube au centre du cône normalement.( je suis censé avoir un tube de 200mm et pas 140mm !) A partir de la couche 200 jusqu’à 675 le tube est correct. Sinon effectivement Netffab corrige des petite erreur tels que les 3 ouverture. Je vois vraiment pas ou je fait une erreur ! tout est fermer jais fait attention en le refaisant. antenne_fixed.obj antenne_fixed(1).stl antenne.blend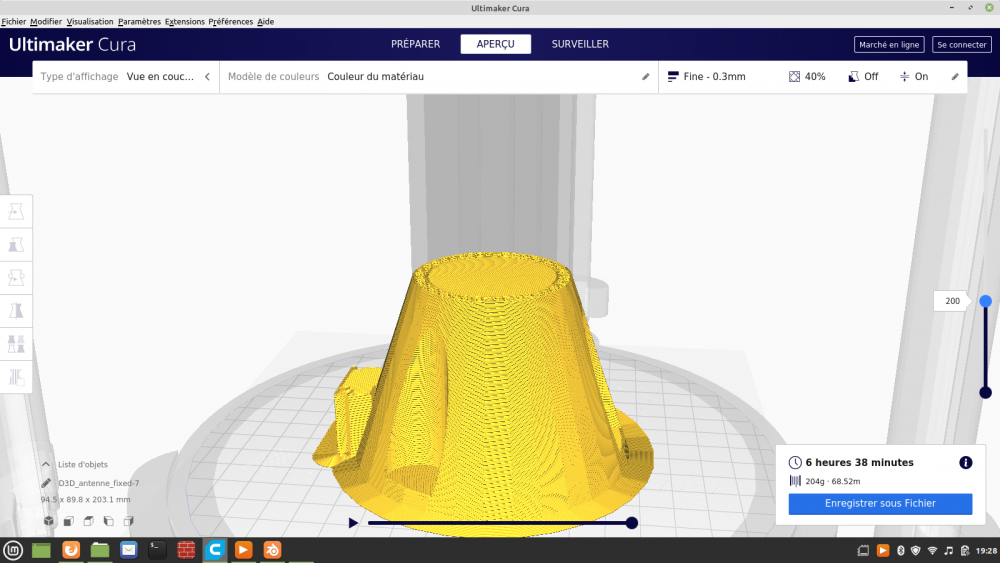
-
probleme fichier STL
Alexandre Cès en réponse au topic de Alexandre Cès dans Entraide : Questions/Réponses sur l'impression 3D
c Merci quand même. je vais le refaire et j’utiliserai netfabb online si jai un problème. -
probleme fichier STL
Alexandre Cès en réponse au topic de Alexandre Cès dans Entraide : Questions/Réponses sur l'impression 3D
merci, je suis aller sur le site. Mais alors je comprend pas trop du-moins j'ai mis le fichier mais ça na rien changer. Ce que je n'arrive pas a comprendre c'est il est fermer sur l’éditeur comment est il possible que avec cura. merci, j'avais mal compris ton message au départ mais en éditant le stl effectivement ce n'est pas très visible. je comprend mieux ton message maintenant. de mon coté jai essayer de le corriger comme fran6p ma conseiller mais ca ne change rien. -
probleme fichier STL
Alexandre Cès en réponse au topic de Alexandre Cès dans Entraide : Questions/Réponses sur l'impression 3D
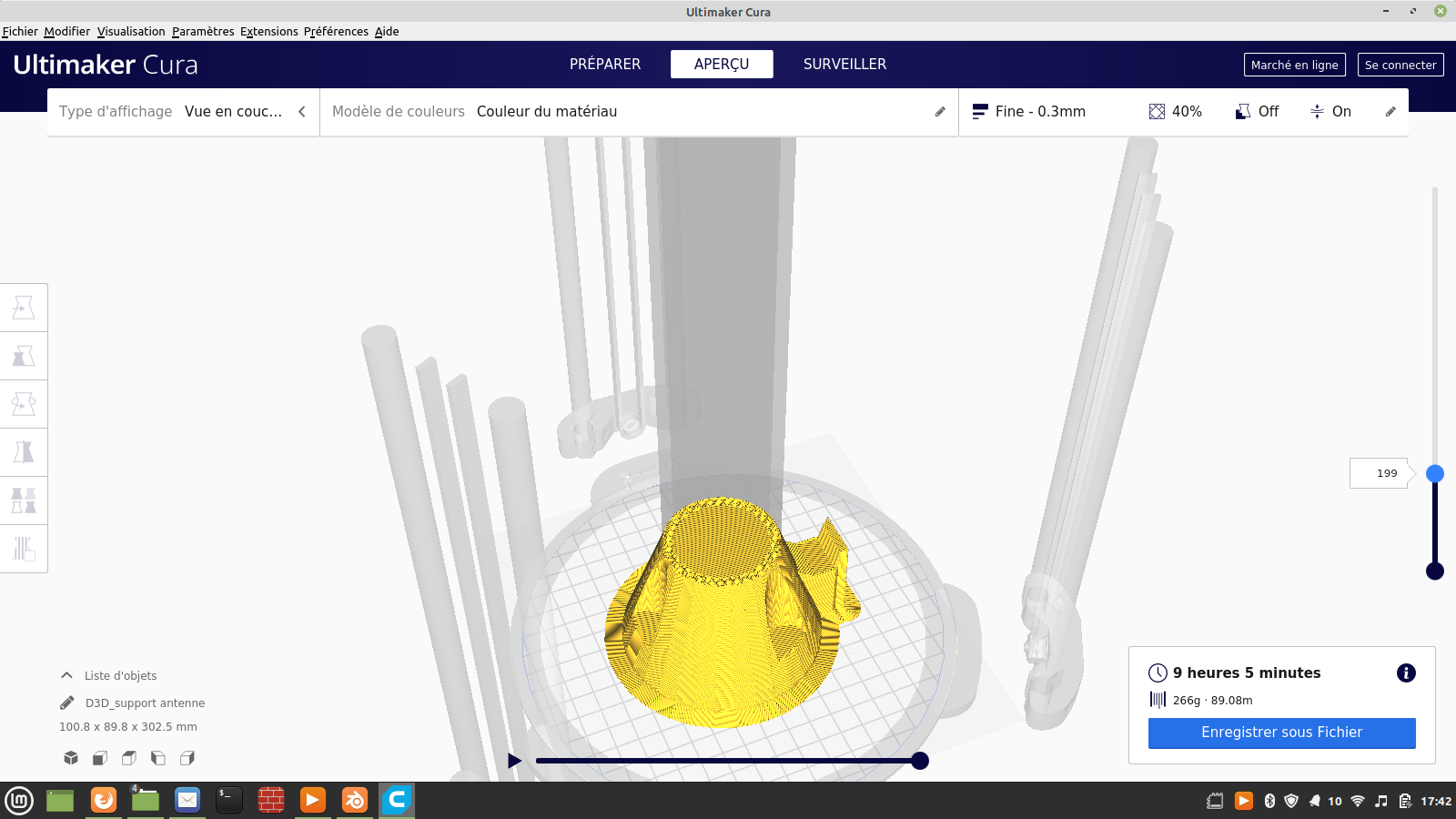
D'accord mais ça sera la même chose que STL que j'ai mis dans mon post. c'est un fichier fait avec blender. La parti qui est censé être vide c'est de début ce que j'ai mis en image plus haut. support antenne.blend -
probleme fichier STL
Alexandre Cès a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour, J'ai modéliser un support. Mais alors le problème est que un endroit qui est vide a l’édition est plein avec Cura. J'ai bien-sur modifier et vérifier si il manquer des face etc ... Mais le problème reste. Je me suis dit autant demander de l'aide, car j'ai beau chercher je trouve pas ou est l'erreur. Si quelqu'un accepte de m'aider je suis preneur Merci d'avance . support antenne.stl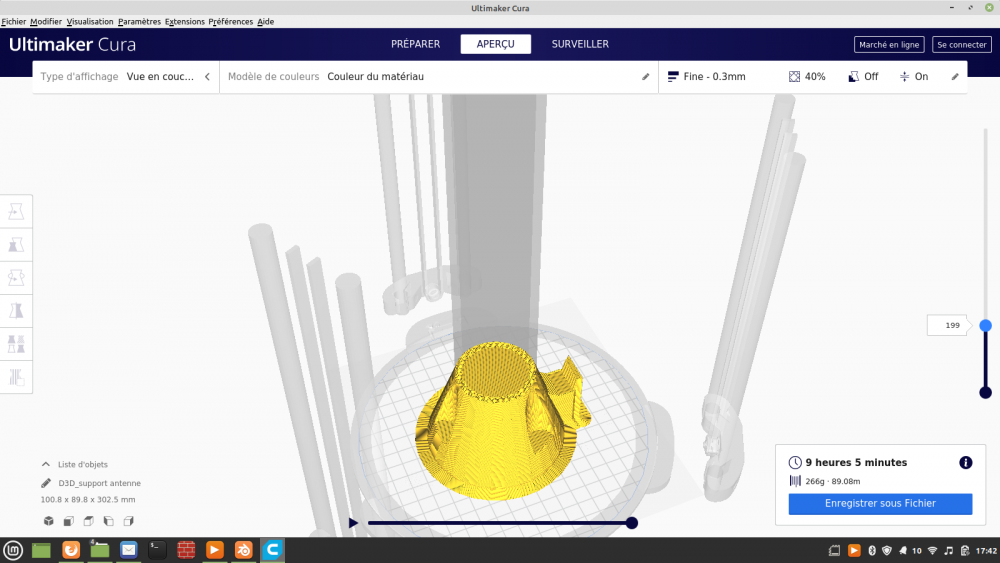
-
Alexandre Cès a changé sa photo de profil
-
probleme ancienne kossel linear plus
Alexandre Cès en réponse au topic de Alexandre Cès dans Anycubic
j'ai essayer, ca a marcher pour l'auto bed levelling mais par contre quand j'ai descendu l'axe z pour verrier si c’était bien a zéro. L'imprimante a couper net et plus moyen de la rallumer, je pense que la carte de contrôle est a changer, quand je pense que j'ai voulu gagner du temps!!!!!!! -
probleme ancienne kossel linear plus
Alexandre Cès en réponse au topic de Alexandre Cès dans Anycubic
Alors finalement il n'y a aucun problème (je ne sais pas pourquoi le lendemain quand je l'ai relancer elle fonctionner normal) Mais le seul problème que j'ai c'est que je n'ai pas encore la sonde pour faire l'autobedlevelling, avec le corona virus compliquer de recevoir de chine. Alors je me suis dit si je prenais un fil que je le connecter sur le plateau aluminium et l'autre sur la buse, lors du contact cela équivaudrai a la même chose qu'un interrupteur.(la sonde est juste un interrupteur connecter a la carte après tous). le seul problème est que cela changerai les dimension , le programme soustrait la dimension de la sonde. #if ANYCUBIC_PROBE_VERSION == 0 #define Z_PROBE_OFFSET_FROM_EXTRUDER 0 // Z offset: -below +above [the nozzle] #elif ANYCUBIC_PROBE_VERSION == 1 #define Z_PROBE_OFFSET_FROM_EXTRUDER -19.0 // Z offset: -below +above [the nozzle] #else #define Z_PROBE_OFFSET_FROM_EXTRUDER -16.8 // Z offset: -below +above [the nozzle] #endif // Certain types of probes need to stay away from edges #define MIN_PROBE_EDGE 20 Est ce que c'est ici que l'on peut changer la taille de la sonde ? car moi il faudra que je la baisse a 0 dans mon cas. (je pense que c'est ca mais je demande au cas ou car je ne suis pas un expert) -
probleme ancienne kossel linear plus
Alexandre Cès en réponse au topic de Alexandre Cès dans Anycubic
je reviens ici car il y a tous de même un soucis, la vitesse des moteurs est beaucoup trop lente, cela avance 1 par 1 mm pour faire un homing. Cela fait aussi ça pour tous les déplacement. j'ai chercher et j'ai trouver ces ligne de code //#define DISTINCT_E_FACTORS /** * Default Axis Steps Per Unit (steps/mm) * Override with M92 * X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]] */ // variables to calculate steps #define XYZ_FULL_STEPS_PER_ROTATION 200 #define XYZ_MICROSTEPS 16 #define XYZ_BELT_PITCH 2 #define XYZ_PULLEY_TEETH 20 // delta speeds must be the same on xyz #define DEFAULT_XYZ_STEPS_PER_UNIT ((XYZ_FULL_STEPS_PER_ROTATION) * (XYZ_MICROSTEPS) / double(XYZ_BELT_PITCH) / double(XYZ_PULLEY_TEETH)) // 80 #define DEFAULT_AXIS_STEPS_PER_UNIT { DEFAULT_XYZ_STEPS_PER_UNIT, DEFAULT_XYZ_STEPS_PER_UNIT, DEFAULT_XYZ_STEPS_PER_UNIT, 96 } // default steps per unit for Kossel (GT2, 20 tooth) j'ai poster ici car je ne suis pas sur a 100 % mais est ce bien ici pour configurer la vitesse des moteurs ? -
probleme ancienne kossel linear plus
Alexandre Cès en réponse au topic de Alexandre Cès dans Anycubic
Merci pascal, je n'avait pas fait les modifications Configuration.h et Configuration_adv.h indiquer. désoler de vous avoir embêter il y avait longtemps que je n'avais plus configurer mon imprimante. -
probleme ancienne kossel linear plus
Alexandre Cès en réponse au topic de Alexandre Cès dans Anycubic
Merci pour votre réponse. j'ai télécharger la version Auto Bed Leveling mais alors cela marche un coup sur 2. (je m'explique l’écran est affiche la présentation et et se fige comme lorsqu'on téléverse le firmware) Par contre la version sans Auto Bed Leveling et qui ne reconnais pas le lit chauffant elle marche !!!! la je doit avouer que je ne sais plus trop quoi faire ! -
Bonjour, j'ai une anycubic kossell linear plus l'ancien model, j'avais dans l’idée d'y mettre la sonde pour faire l'autobed leveling. Donc j'ai installer télécharger et installer marlin . Le seul problème est que maintenant l'imprimante est inutilisable j'ai un écran bleu figer. En plus avec le corona virus ma sonde ne risquer pas d'arriver vu que l'on peut commander que en chine. Je voudrais savoir ou retrouver le firmware compatible avec ce model, car j'ai ésseiller tous ce disponible sur le site marlin aucun ne marche (toujours l’écran bleu). Sinon dans le pire des cas j'en rachète une vue le prix car la sonde a elle seul vaut 1/10 du prix et je la garde pour les piece en rechange ou en faire quelque chose d'autre .