Adrien
-
Compteur de contenus
23 -
Inscrit(e) le
-
Dernière visite
Récompenses de Adrien
")





-
Bonjour Laurent ! Effectivement, le lien n'est plus directement accessible, mais il n'a pas disparu ;-) : https://www.dagoma.fr/boutique/produit/box/box-le-petit-robot-educatif-scott-by-la-machinerie.html De plus, j'ai créé un repo Git avec les éléments existants pour que ce soit plus simple à l'avenir et que je puisses mettre à jour le contenu plus facilement et créer un wiki : https://github.com/LaMachinerie/SCOTT Bonne soirée à toi !
-
Salut Eric ! Actuellement je suis salarié dans le FabLab de La Machinerie du coté robotique. Cool ! Je note pour la prochaine version. Ha oui ... Je comprend :-) Impeccable ! C'est vrai qu'il y a déjà ce qu'il faut, mais j'ai d'autres idées de développement qui vont, je pense, nécessiter des blocks perso. Ok ! Je vais l'intégrer aux fichiers de design !
-
Salut ERT86, Merci pour tes retours et content que le kit te plaise ;-) Concernant les cosses, c'est étrange. J'en parle à Dagoma tout de suite pour voir ce qu'il s'est passé ( car normalement les cosses sont présentes ... ). Le programme SUMO est assez basique en fait : le robot tourne sur lui même Si il voit un objet il regarde à gauche et à droite pour voir sa direction En fonction de la distance il fonce sur l'objet ( le robot adverse dans ce cas ) Si il ne voit plus rien il recommence le programme au début Un petit conseil : tu peux descendre la vitesse du robot en modifiant le paramètre dans les sous programmes "avant", "arriere", etc ... Ca permet aussi de régler la dérive du robot si on veut. Je suis en train de travailler sur une méthode plus facile à mettre en oeuvre pour les enfants et en // je regarde aussi comment modifier ArduBlock et créer ma propre couche d'ArduBlock pour Scott afin d'intégrer les blocs directement avec les paramètres qui vont bien ;-) Mais c'est pas vraiment mon domaine donc je regarde ça a la rentrée avec un usager du FabLab. On peut atteindre le niveau du robot SUMO avec les enfants en passant par plusieurs phases/programmes : Faire détecter un objet et s'arrêter Faire détecter un objet et tourner à droite/gauche Faire détecter un objet et enregistrer la distance dans une variable Faire détecter un objet et regarder à gauche/droite et choisir l'espace ou c'est libre Et enfin inverser le précédent programme pour que le robot fonce sur l'autre robot ;-) C'est assez long mais super gratifiant quand les enfants réussissent ça ! J'ai pris note pour l'interrupteur. Pour le capteur de ligne c'est une des version prévue mais je n'ai pas encore trouvé de capteurs suffisamment robustes, efficaces en haute lumière et facile à mettre en oeuvre pour le moment. J'utilise/fabrique des capteurs pour mes gros robots en général, mais c'est beaucoup trop compliqué ^^ Je continu de tester des prototypes avec les enfants à la rentrée. Pour la bille, le système de clips n'est pas optimal en effet. Sur certaines imprimantes ça passe, sur d'autre non ... Je réfléchit à une autre solution. La bille n'a finalement pas besoins de tourner pour que ça fonctionne vu le poids du robot. On test également les patins en téflon ;-) Et enfin pour la carte Dagu, vous pouvez la trouver sur GoTronic un peu moins chère je pense. C'est vrai que cette carte est super mais reste un peu chère et il est également difficile de rentrer en contact avec le fabriquant. Voila pour cette réponse un peu longue ;-)
-
Bonjour, Désolé du retard ! on va regarder ça ensemble. Peux tu ouvrir le menu "outils" et me faire un screenshot de la barre de menu et de ce que tu vois dans "carte" et "board" svp ? Une erreur de chargement peut apparaitre suite à un soucis avec les drivers ou avec le port COM. Si le voyant bleu clignote c'est qu'il reçoit bien des données. Par contre pourquoi avoir / Vouloir vider la mémoire ? La mémoire du programme tu veux dire ? Tout est écrasé lors du chargement d'un nouveau programme normalement. Si tu veux, pour éluder tout autre problème de programmation, tu peux tester avec un programme vide. Ouvre un nouveau fichier ( fichier > nouveau ). Si le programme n'est pas vide, alors copie/colle ce contenu et essaye de le charger : void setup() { // put your setup code here, to run once: } void loop() { // put your main code here, to run repeatedly: }
-
Salut Boupa, As tu correctement selectionné la version de la carte comme montré sur la slide 55 ("outils > type de carte > Arduino NG or older" ) ? Quand tu branche le Dagu, quels ports sont proposés ?
-
Merci pour la modif ... Je vais regarder sur mon fichier si je peux trouver un compromis avec une bille de 9,4 pour que ça fonctionne avec tous les diamètres.
-
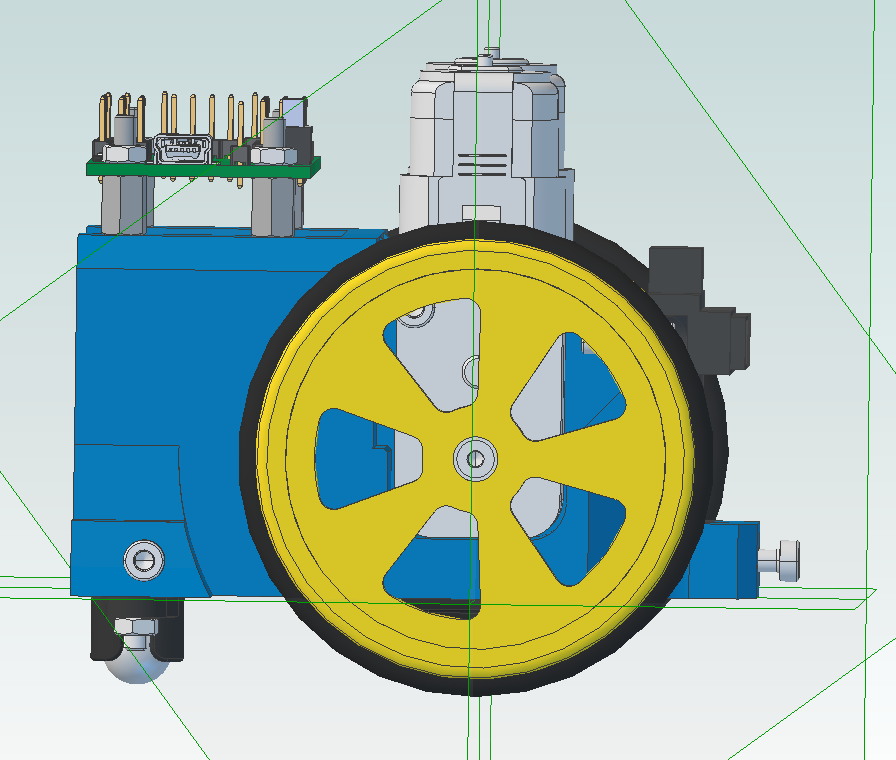
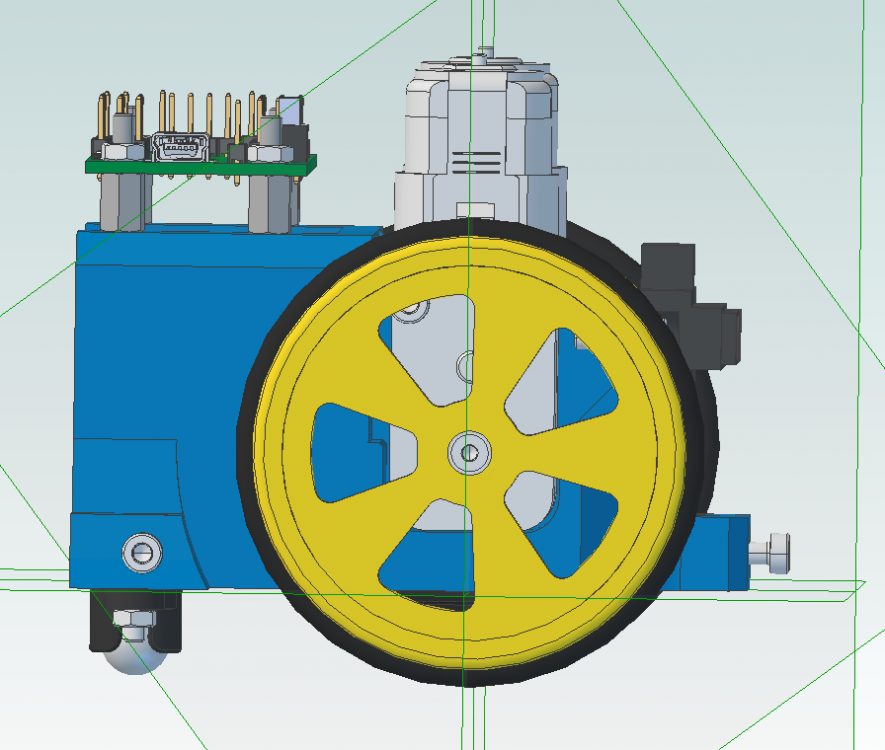
Bonjour a tous, Merci pour la photo boupa ! J'ai fait un re-design des roues pour les joints de 5mm ainsi que pour le chassis ... Bidulle et boupa : vous avez utilisés le fichier du forum ou celui de chez dagoma ? Normalement, le nouveau fichier seul pour les roues règle le problème ( chez moi en tt cas ). Mais afin de plus avoir de soucis, j'ai changé le fichier du chassis pour laisser plus de marge ( voir photo ). J'attendais d'avoir la photo de Bidulle de la roue qui touche le châssis ( j'avais mis vidéo dans mon message ... désolé ... ) pour finir la mise à jour et envoyer les fichiers à Dagoma. Merci pour ce retour, et dites moi ce que ça donne chez vous avec les nouveaux fichiers.
-
Salut ! Tu peux poster une vidéo de la roue qui touche châssis sans la vis stp ? Cela peut se régler avec un petit re-design. Pour la vis, si elle est trop longue, tu peux utiliser une petite vis à bois. C'est juste pour éviter que la roue parte, mais ce qui fait la liaison en rotation c'est bien les méplats. Je suis en train de voir avec Dagoma pour changer ces vis.
-
Ok ... Alors normalement la roue doit s'enfoncer beaucoup plus que ça sur l'axe ... Il y a 2 méplats qui doivent permettre à la roue de se monter sur l'axe. Tu as essayé d'appuyer un peu plus fort dessus ?
-
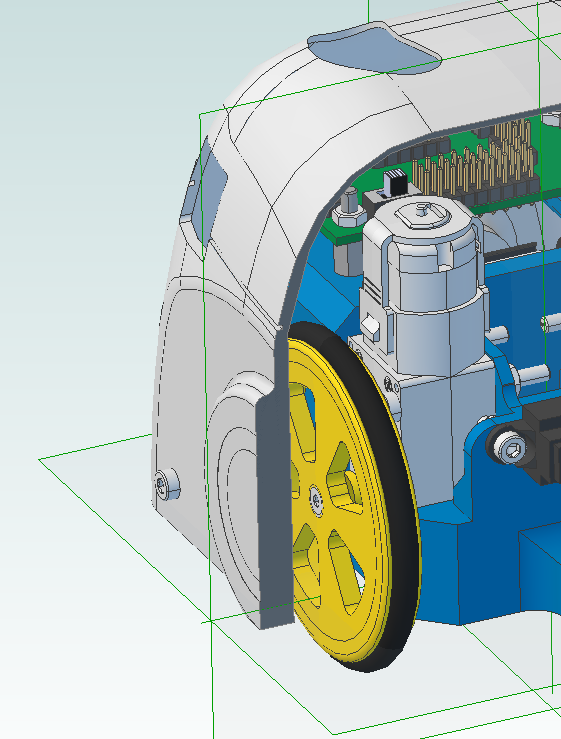
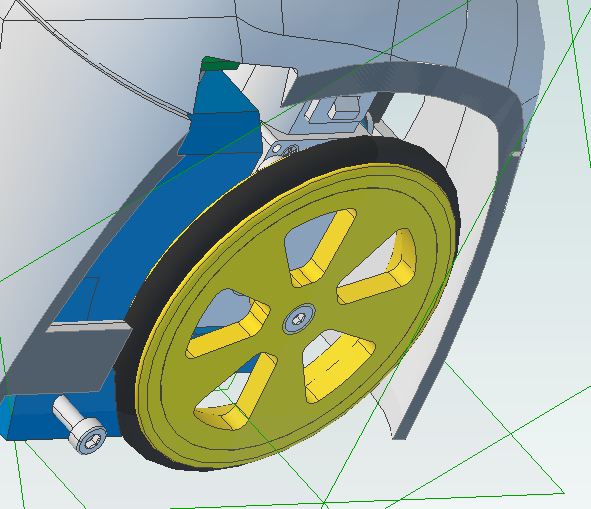
Salut ! Merci pour toutes ces remarques ! je vais regarder pour améliorer ça ! Et pas de soucis, je ne prend pas du tout ça comme des critiques négatives mais bien purement constructives ! Par contre, je suis plus étonné par le fait que les roues touchent la coque ... Ca touche à quel endroit ? J'ai fait la modification sur la route quand j'ai vu ton message, du coup, je n'ai pas eu le temps de tester en vrai ( je suis de retour dans mon fablab demain aprem ... ), mais sur mon modèle CAO, je n'ai pas remarqué de contact visuellement même avec mes vues en coupe ... Peux tu me dire où cela touche ?
-
Bonjour ! Oui, normalement vous auriez du recevoir des joints de 3mm ... J'ai donc refait un fichier pour des joints de 5 mm ( en pièce jointe ) et je vais regarder ce soucis avec Dagoma. Désolé pour ce problème de soudure. La soudure était-elle "cassée" / ou le fil cassé / ou vraiment dessoudé ? Je fais remonter à Dagoma pour voir ce que l'on peut faire pour sécuriser les prochains kits. Pour les soucis de documentation, je suis en train de réfléchir à une amélioration de la notice sur ce point. Vous auriez souhaités : + ou - de textes ? + ou - de schémas ? + ou - de photos ? Une vidéo du montage vous aurait-elle aidée ? Quelles étaient les étapes qui vous ont sembler vraiment flous ? Bon ... Au moins un point positif ^^ J'espère qu'il vous apportera satisfaction dans le temps. N'hésitez pas à me faire vos retours si vous vous vous apercevez d'un problème sur le kit ( ou si vous avez de belles images de vos robots aussi ;-) ). Pour information, un nouveau châssis avec des fixations optimisées ainsi qu'une coque plus fine ( donc plus rapide à imprimer mais aussi plus fragile lors de chutes de répétées à 80 cm du sol - testé en FabLab ^^ ... ) sont en ligne sur le site depuis jeudi.
-
Ce qu ifaut savoir c'est que notre structure ne gere pas qu'un FabLab. C'est un Tiers lieux avec à l'interieur : - Un coworking - Un FabLab - Un incubateur - Une boutique Partagée - Un espace de médiation robotique pour les jeunes Du coup, aucun outils ne permet de gérer ces différents espaces d'un coup ;-) Mais pour un FabLab qui débute, FabManager est un super outil !
-
@MatC Ok ! Alors on avait débuté le FabLab en 2012 donc bien avant "FabManager" de la Casemate, du coup on est partit sur : - Site web : agenda, parc machine, horaires, modes de fonctionnement - Dolibarr : gestion financière, adhésion, factures, etc... - Redmine : gestion de projet et documentation - Makake : documentation Et là on est en train de voir pour utiliser Diaspora pour le réseau des usagers.
-
Alors test rapide sous mac avec ardublock : ça ne fonctionne pas avec les fichiers que j'ai produit ... Mais ! J'ai une solution ! Plutôt que d'utiliser arduBlock en téléchargement sur le blog d'origine, j'ai ré-utilisé le fichier stocké dans les paquets de DuinoEDU. Et là, miracle ! Ca fonctionne ! Bon ça veux dire que je dois tester sous linux maintenant mais ça va grandement simplifier la documentation ! Pour les fichiers de programmation, j'envois un mail à Dagoma dans la minute ! Tu trouveras les fichiers en pièce jointe.
- 43 réponses
-
- 3
-

-
- robotique
- discovery200
- (et 1 en plus)
-
Bonsoir Xavier, Pas de soucis pour le message ;-) C'est normal que ce soit frustrant. Ok pour les roues. Tu me diras si ça passe bien, sinon je modifierais les jeux. Coté écrous sur le châssis, je n'avais pas remarqué ... Je vais imprimer le fichier en partit pour tester ... Coté DuinoEdu, malheureusement pas encore ... Mais tu peux installer ArduBlock qui fonctionne pareil mais intègre moins de fonctions ( et est surtout en anglais ... ). http://blog.ardublock.com/engetting-started-ardublockzhardublock/ Si tu as des soucis avec l'installation fait moi signe, on regardera ensemble. Je n'ai pas encore testé suffisamment longtemps sous cet environnement, c'est pour ça que dans la documentation, j'ai indiqué uniquement la version windows qui fonctionne bien et sur laquelle j'ai le plus de retour ( et la version mac également, en cours de doc ). Par contre coté code, je ne suis pas sur que les codes fournis pour duinoedu fonctionne pour ardublock ... Je n'ai pas encore regardé, mais je peux faire l'essai et te faire des fichiers spécifiques pour ardublock.