Juju6768
-
Compteur de contenus
5 -
Inscrit(e) le
-
Dernière visite
Visiteurs récents du profil
190 visualisations du profil

Récompenses de Juju6768
")




-
Un grand Merci, A présent c'est nickel Avant: Après: Tu me retire un sacré poids, je ne savais plus ou chercher, sa m'apprendra a suivre les notes de mises a jours J'ai tellement bosser sur cette imprimante que c'en étais devenu frustrant a un point ou j’hésitais a la jeter par la fenêtre Merci a tous

-
Bonjour, La seul raison est que je n'ai pas suivi le fil des mises a jours Je vais l'installer et voir si sa arrange mon problème.
-
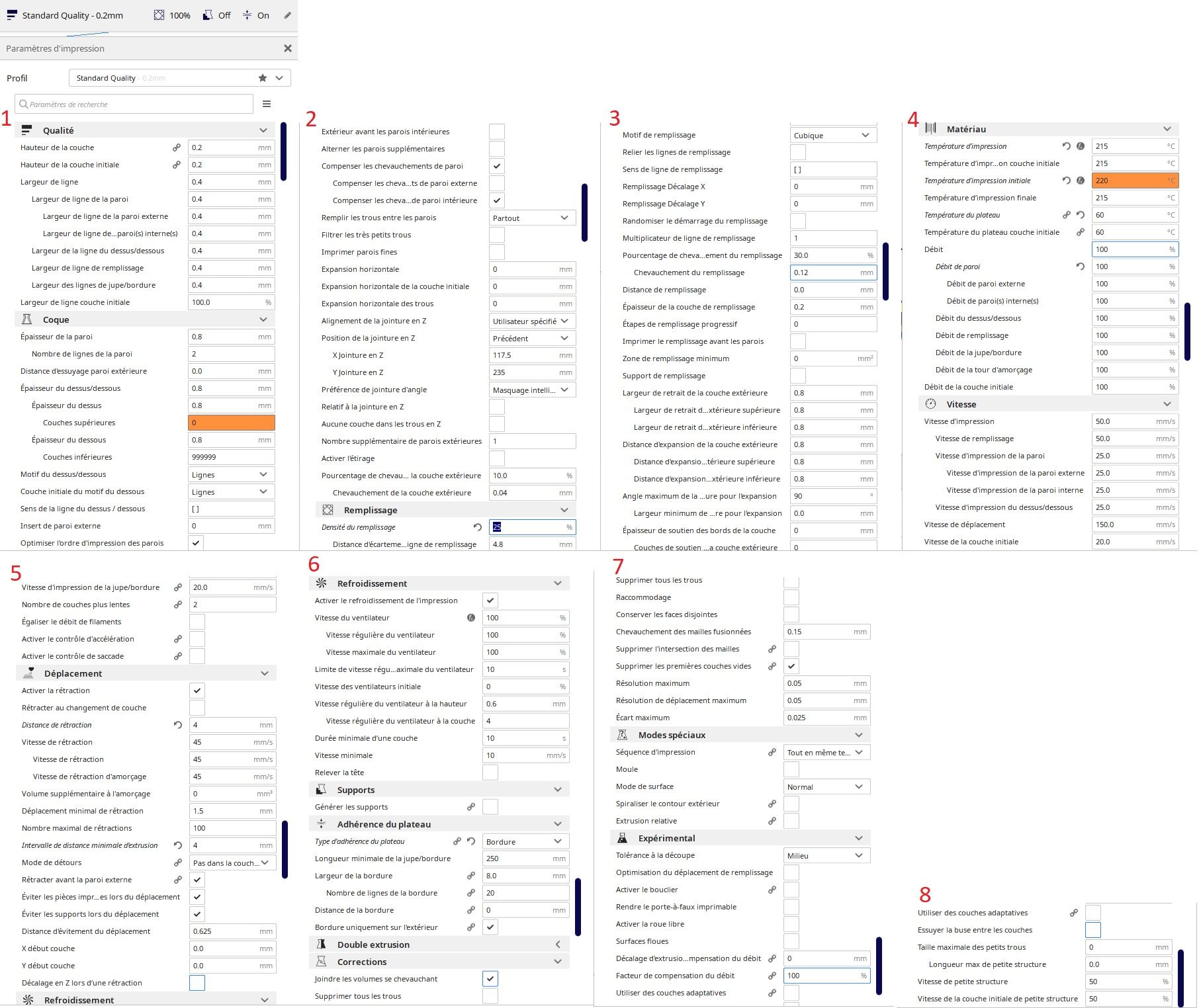
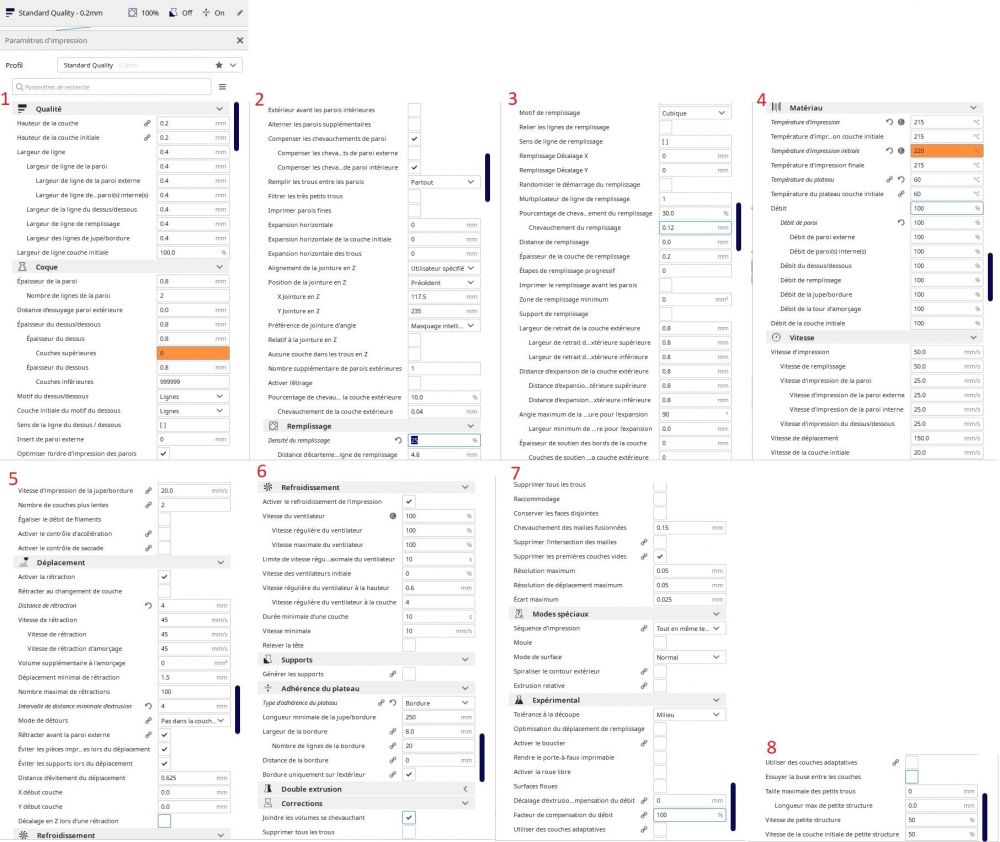
Bonjour Je vous pris d'accepter mes excuses,je suis de nature impulsive, j'éviterais de réagir de la sorte a l'avenir. j'ai essayer très maladroitement de capter votre attention, il est toutefois vrai qu'obtenir une aide efficace dans ce domaine est difficile, mais sa n'excuse pas le ton, vous ne me devez rien et vous avez bien raison de le souligner. Je suis un brin caractériel je l'admet volontiers, mais je ne suis pas imperméable a la remise en question. Je trouve que tu a raison, j'ai eu un excès de confiance en faisant tout en un coup alors que j'aurais du y aller par paliers, j'ai eu cette réflexion au cours de la semaine et je suis progressivement revenu en arrière, j'ai remis l'extrudeur stock et la tête d'origine le résultat est le même donc j'ai laisser l'extrudeur d'origine ( je n'aime de toute façon pas le BMG) mais j'ai remis le petsfang et le hotend E3DV6, la prochaine étape est de préparer des connecteurs pour brancher la carte mère d'origine en volant pour essais. Les courroie sont bien tendus, les excentriques X et Y sont régler de sorte a ce qu'il n'y ai aucuns points dur sans avoir de jeux, pour le Z je devrais démonter la tige pour vérifier. J'utilise Cura 4.7.1 , voici l'intégralité des paramètres du profil: Voici les paramètres que j'ai entré dans la section " motion" de Marlin, je suis passer a une 1.1.9 que j'ai paramétrer moi même. /** * Default Axis Steps Per Unit (steps/mm) * Override with M92 * X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]] */ #define DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, 400, 94 } /** * Default Max Feed Rate (mm/s) * Override with M203 * X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]] */ #define DEFAULT_MAX_FEEDRATE { 500, 500, 5, 25 } /** * Default Max Acceleration (change/s) change = mm/s * (Maximum start speed for accelerated moves) * Override with M201 * X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]] */ #define DEFAULT_MAX_ACCELERATION { 500, 500, 100, 5000 } /** * Default Acceleration (change/s) change = mm/s * Override with M204 * * M204 P Acceleration * M204 R Retract Acceleration * M204 T Travel Acceleration */ #define DEFAULT_ACCELERATION 500 // X, Y, Z and E acceleration for printing moves #define DEFAULT_RETRACT_ACCELERATION 500 // E acceleration for retracts #define DEFAULT_TRAVEL_ACCELERATION 500 // X, Y, Z acceleration for travel (non printing) moves /** * Default Jerk (mm/s) * Override with M205 X Y Z E * * "Jerk" specifies the minimum speed change that requires acceleration. * When changing speed and direction, if the difference is less than the * value set here, it may happen instantaneously. */ #define DEFAULT_XJERK 10.0 #define DEFAULT_YJERK 10.0 #define DEFAULT_ZJERK 0.3 #define DEFAULT_EJERK 5.0 j’espère ne pas vous avoir trop froissé avec mon message précédent, je voudrais vraiment pouvoir échanger et acquérir les connaissances qui me permettrons de faire fonctionner cette machine le mieux possible.
-
Quel convivialité ce forum. lors de mes recherches je vois toujours des posts provenant d'ici avec pleins de réponses pertinentes et la vous allez me dire que personne d'expérimenter ne peut prendre le temp d'au moins me donner une piste ? J'ai déjà remarquer que dans ce domaine obtenir de l'aide efficace étais bien difficile.
-
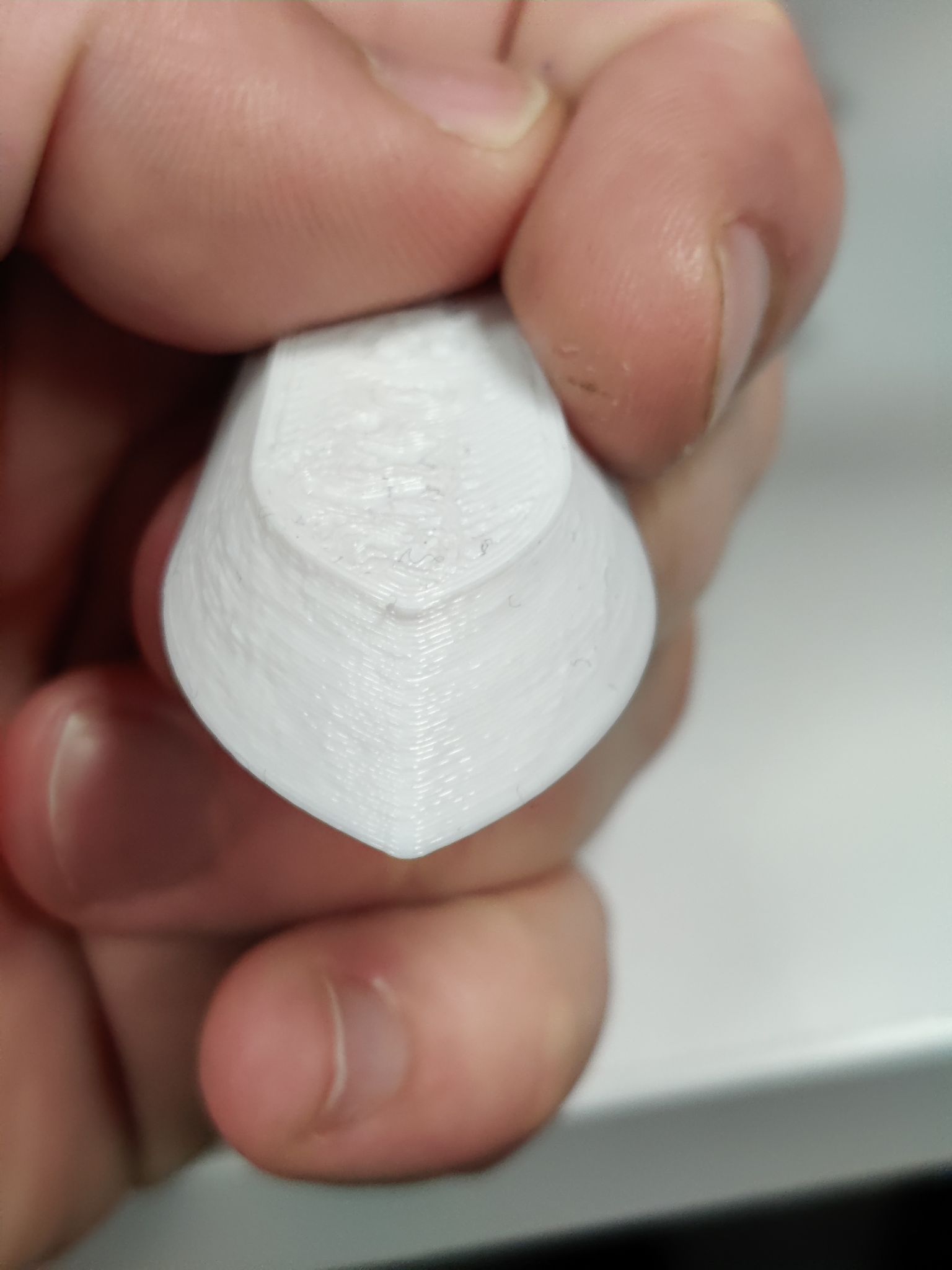
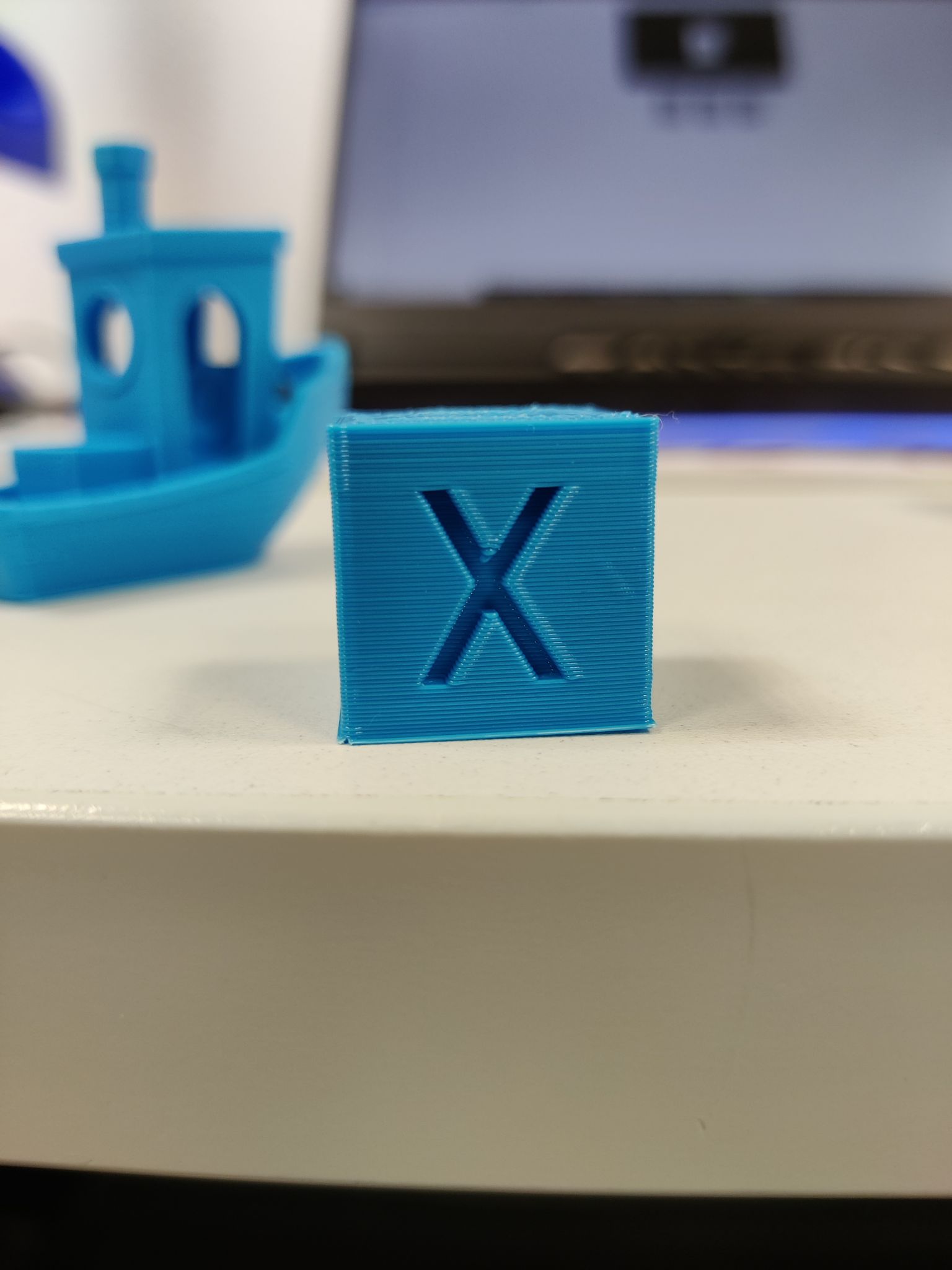
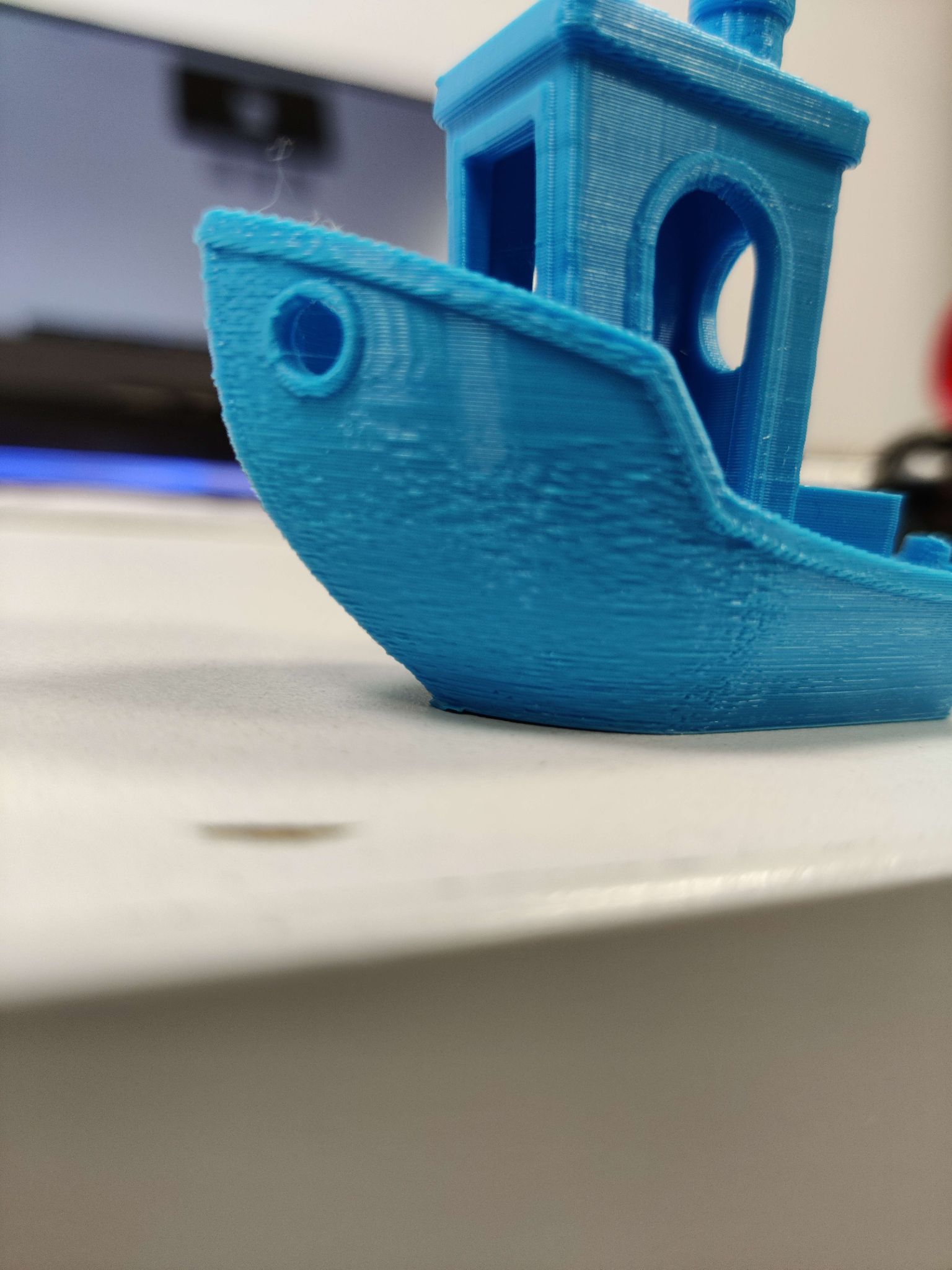
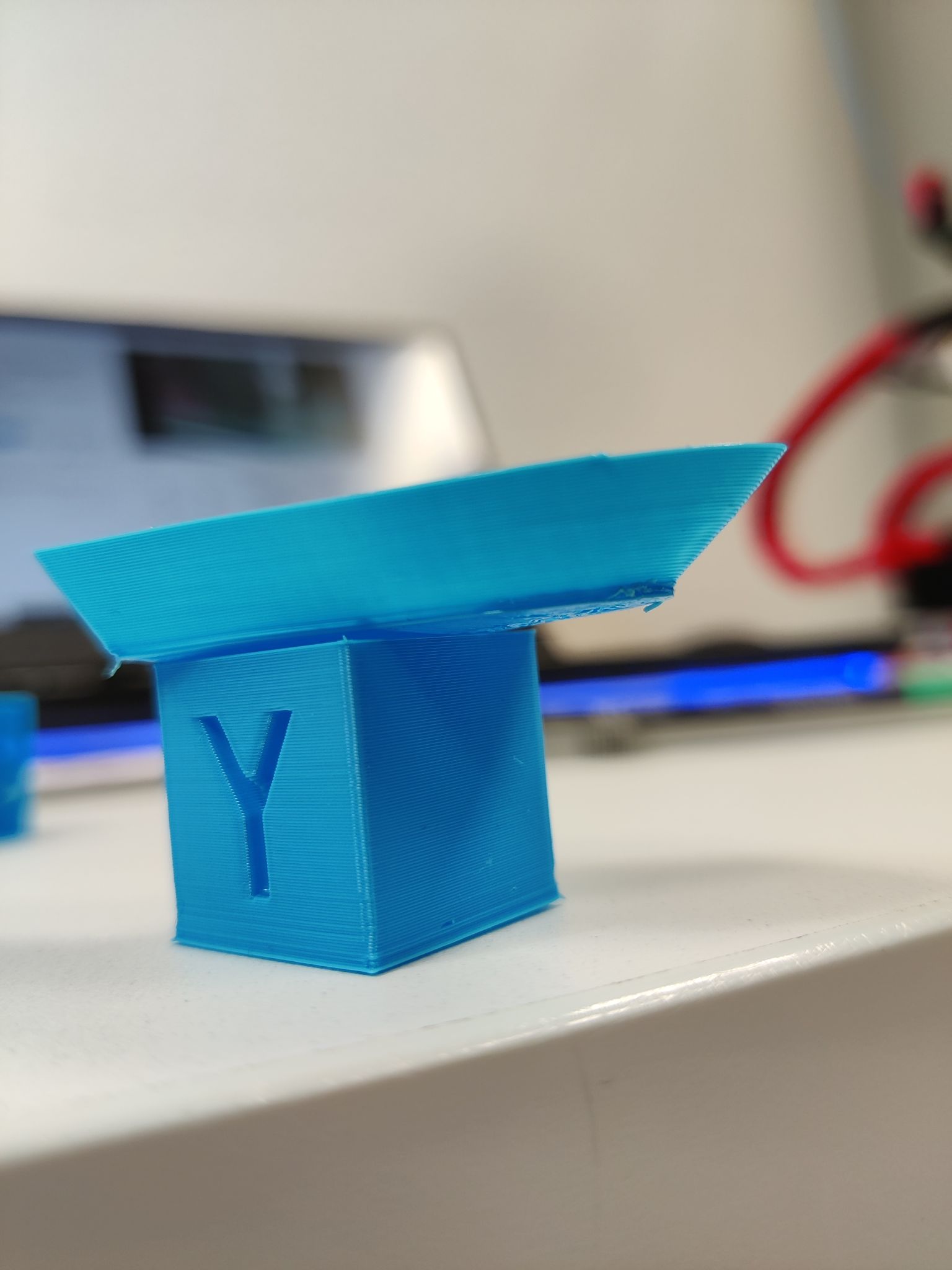
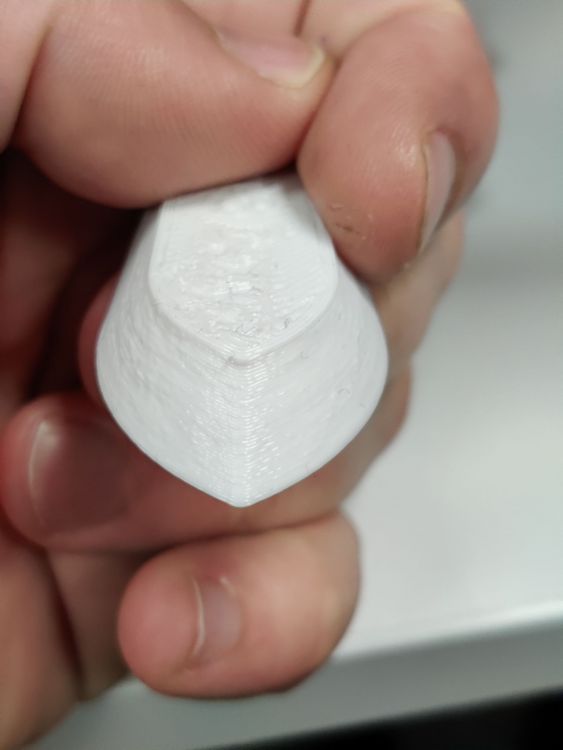
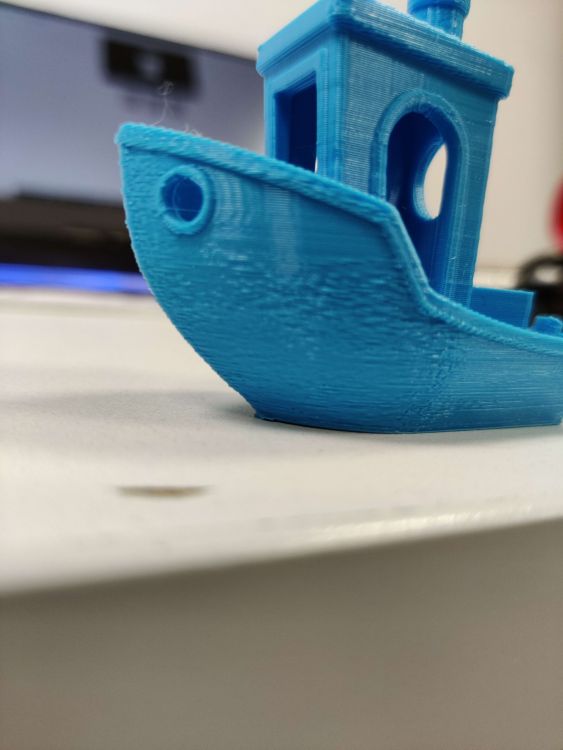
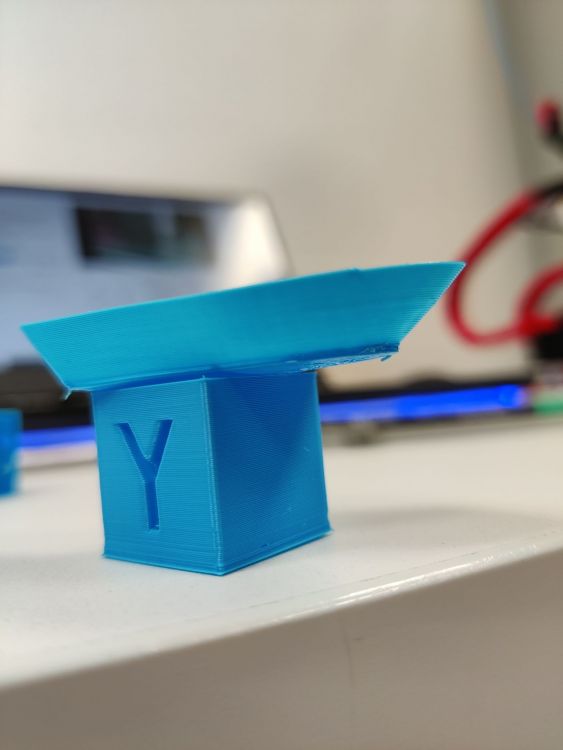
Bonjour, Je rencontre un Problème de qualité avec ma Creality ender 3, J'ai acheter cette imprimante en occasion pour la trafiquer et donc d'apprendre par moi même sans pour autant trafiquer mon Artillery Genius qui fonctionne parfaitement. j'ai donc entrepris une refonte de la carte mère, de l'extrudeur et de la buse et j'ai ajouter un BL-touch. Le firmware est Marlin 1.1.8, j'ai pris la base du guero Loco ou j'ai juste activer le babystepping et l'incrémentation de M290 dans M851, pour pouvoir règler mon Z Offset via le TFT (24), j'ai aussi modifier les Step par MM de E (extrudeur BMG que je vais remplacer par un titan, je trouve le BMG trop contraignant), j'ai un peut baisser le Jerk et l'acceleration, je reviendrais plus en détails sur les valeurs que j'ai entré si vous le juger utile. Tout fonctionne presque bien je précise que je suis sur le profil de base pour la Ender 3 sur cura, a part la Température, le remplissage et la vitesse, je n'ai rien toucher. -J'ai commencer par imprimer un Cube de calibration en 0.32 , qui n'est pas parfait mais acceptable: -j'ai ensuite imprimer un benchy en 0.2: Je remarque qu'elle réussi bien les surfaces droites mais dès qu'il y a un porte a faux et des angles c'est la catastrophe, J'ai calibrer l'extrudeur, il extrude bien 100 mm demander, j'ai imprimer des cubes en mode spiralisé j'obtenais 0.5 mm au lieux de 0.4, j'ai donc baisser le débit a 80% et je mesure bien 0,4 mais le problème est toujours présent. - J'ai imprimer un début de benchy en mode spiralisé et on peut voir que la coque est propre: On m'a suggérer de faire une tour de température, mais je n'en vois pas l’intérêt, je l'ai tout de même fait, je l'ai stopper car j'avais d'autres essais en tête et le cran 220° avais parfaitement été réaliser. J'imprime ce PLA sur ma genius a 220° pour 60mms sans aucuns problème et quand bien même chaque machine est différente, je pense que les impressions spiralisé foirerais aussi voir encor + si le problème étais la température. Je bloque, pourriez vous m'aider SVP ?

-
Bonjour, Je m'appelle julien, j'ai 32 Ans, Automaticien industriel dans la région du Haut-Rhin. je suis possesseur d'une Artillery Genius et d'une Ender 3 (Qui n'a plus grand chose a voir avec une Ender 3) je me suis inscrit sur ce forum car je rencontre certains problème avec la Ender 3 et étant encor tout frais dans le domaine de l'impression 3D j'ai besoin d'un support autre que les groupes Facebook pour poser des Questions, ils sont très bien, mais au fur et a mesure de mes précédente recherches je suis souvent tomber sur des post du forum et j'ai remarquer que les réponses sont plus complètes. Voila pour ma présentation, au plaisir d'échanger avec vous