mmaura66
-
Compteur de contenus
10 -
Inscrit(e) le
-
Dernière visite
Récompenses de mmaura66
")





-
Palpeur Z avec servo moteur DE200 (et Marlin Git)
mmaura66 en réponse au topic de mmaura66 dans Mise à jour et/ou amélioration
J'ai toujours un décalage que je n'arrive pas à corriger donc j'ai fait marche arrière et remis le palpeur inductif. -
Alors ça fonctionne pour toi ?
-
Palpeur Z avec servo moteur DE200 (et Marlin Git)
mmaura66 en réponse au topic de mmaura66 dans Mise à jour et/ou amélioration
Pas besoin, par contre c'est mieux prévoir une rondelle sur la vis qui va dans le bras pour supprimer un peu de jeux. De plus les vis d'origine sont trop courtes, faut en trouver des plus longues. -
Palpeur Z avec servo moteur DE200 (et Marlin Git)
mmaura66 en réponse au topic de mmaura66 dans Mise à jour et/ou amélioration
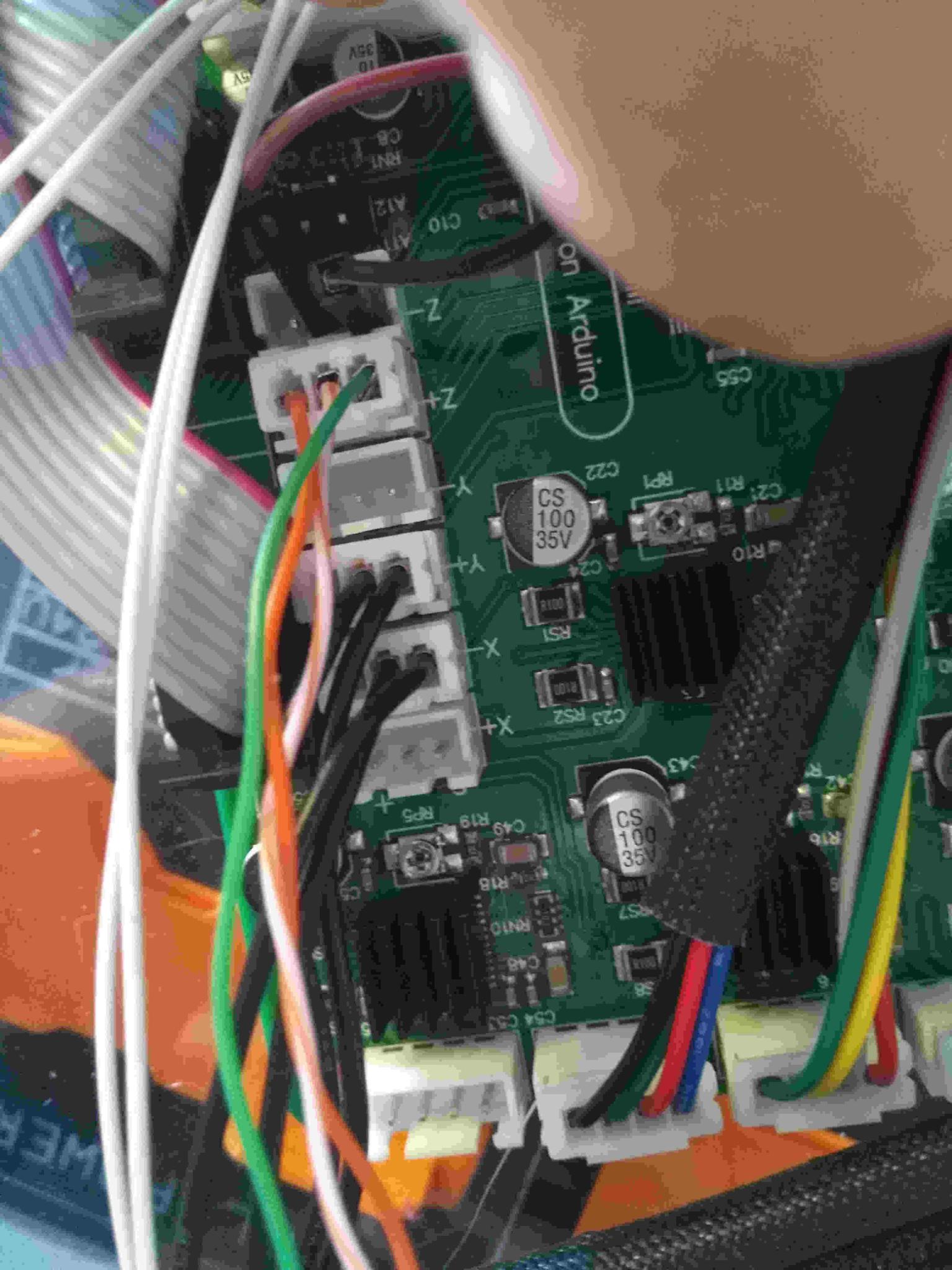
Bonjour, Dans mon cas, comme j'ai switché sur le git marlin, j'ai préféré recâbler tous les capteurs de façon plus logique. Z- il y a le capteur du palpeur Z+ la commande du servomoteur Y+ le capteur de buté Y (Y butte pour les coordonnées MAX) X- le capteur de butté X (X butte pour X minimum) PS: Je viens de modifierle bras, pour essayer de réduire la variation entre deux touchés (M48), j'ai 0.07 . Je mettrais à jour thinkverse et le 1er post quand je l'aurais testé.
-
Bonjour, je pense que ma réponse résout aussi ce problème ...
-
Bonjour, je me suis battu contre ce problème pendant plusieurs mois, retour en SAV et tout... j'ai trouvé la réponse sur un autre forum me rappel plus lequel. C'est a cause de fait que les têtes E3D sont entièrement métallique a l'intérieur du corps, et le filament peut accrocher. Je n'ai pas osé faire le test au début, mais après le retour du SAV (corps de chauffe neuf) voyant que le problème persistait, j'ai pris le risque (qui à mon avis n'en ai pas un). Au final je met une goutte d'huile de colza sur un bout d'éponge traversé par le filament, et depuis plus de problème. Ce n'est vraiment pas la peine d'en mettre beaucoup, ni de renouveler trop souvent. pour info j'imprime avec du filament BQ à 190° (205° la première couche) PS: La première fois j'ai mis la dose ! ça c'est traduit par un manque d’adhérence, j'ai nettoyé mon plateau avec un mélange vinaigre blanc bicarbonate.

-
Palpeur Z avec servo moteur DE200 (et Marlin Git)
mmaura66 en réponse au topic de mmaura66 dans Mise à jour et/ou amélioration
Oui mais je n'ai fait que le G28 sur la vidéo. Oui c'est bien ça, la pièce remplace le roulement. -
Palpeur Z avec servo moteur DE200 (et Marlin Git)
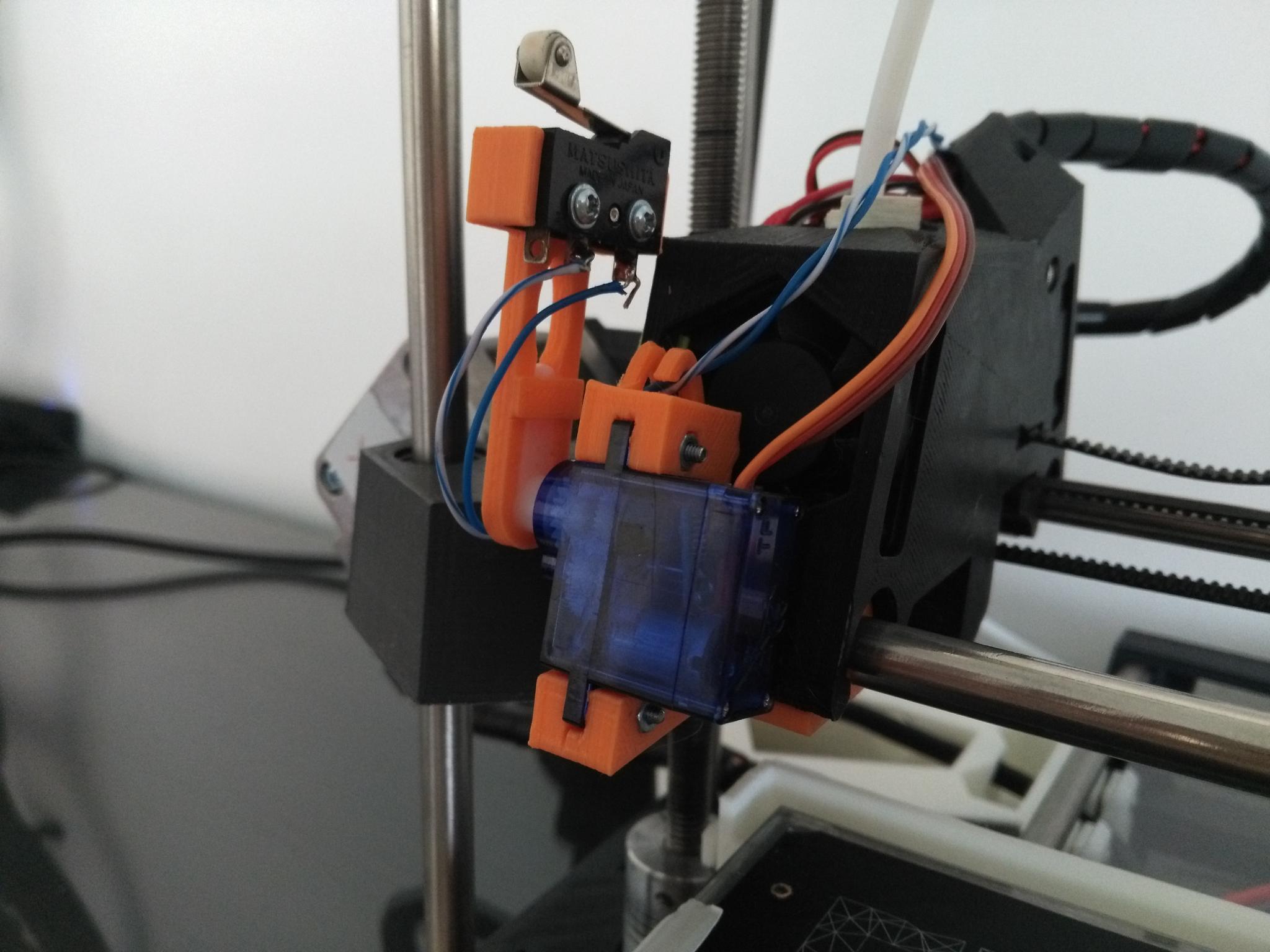
mmaura66 a posté un sujet dans Mise à jour et/ou amélioration
Bonjour, J'en avais assez des variations de précision du palpeur inductif dues au changements de températures (préchauffe). Aussi ai-je décide de faire un palpeur avec un servomoteur. Le servomoteur est un SG90. les fichiers sont la https://www.thingiverse.com/thing:2503106 Bon parlons un peut firmware, et c'est la que ça se complique... Au départ j'ai voulu adapter le source marlin téléchargé chez Dagoma, et comment dire ... il semble que leur configuration du firmware Marlin leur soit propre et personnellement je la trouve incompréhensive ... J'ai donc opté pour la version GitMarlin (officielle https://github.com/MarlinFirmware/Marlin). Mon git Je ne vais pas expliquer toute la configuration de Marlin, c'est vraiment trop long et trop dépendant de la machine, j'ai un clone du git Marlin avec mes modifications (https://github.com/mmaura66/Marlin). Les fichiers modifiés sont (détails): Marlin/Configuration.h Marlin/Configuration_adv.h Marlin/pins_RAMPS.h Marlin/thermistortable_17.h Marlin/thermistortables. Si vous clonez mon git, sachez que : j'ai un lit chauffant un écran LCD 12864 j'utilise le servomoteur Pensez a garder le doigt sur la touche on/off quand vous faite les tests !! Options propres au servomoteur //ligne 612 ordonne le mouvement du servo pour palper #define Z_ENDSTOP_SERVO_NR 0 // Defaults to SERVO 0 connector. #define Z_SERVO_ANGLES {0,180} // Z Servo Deploy and Stow angles //ligne 663 décalage du point palpé #define X_PROBE_OFFSET_FROM_EXTRUDER -13 #define Y_PROBE_OFFSET_FROM_EXTRUDER -43 // Y offset: -front +behind [the nozzle] // offset approximatif #define Z_PROBE_OFFSET_FROM_EXTRUDER -15.80 #define X_MIN_POS -2 #define Y_MIN_POS -1 #define Z_MIN_POS -20 #define X_MAX_POS 203 #define Y_MAX_POS 203 #define Z_MAX_POS 173 //sinon on butte en hauteur ! (zoffset a ~= -15) //1577 #define NUM_SERVOS 1 // Servo index starts with 0 for M280 command #define SERVO_DELAY 300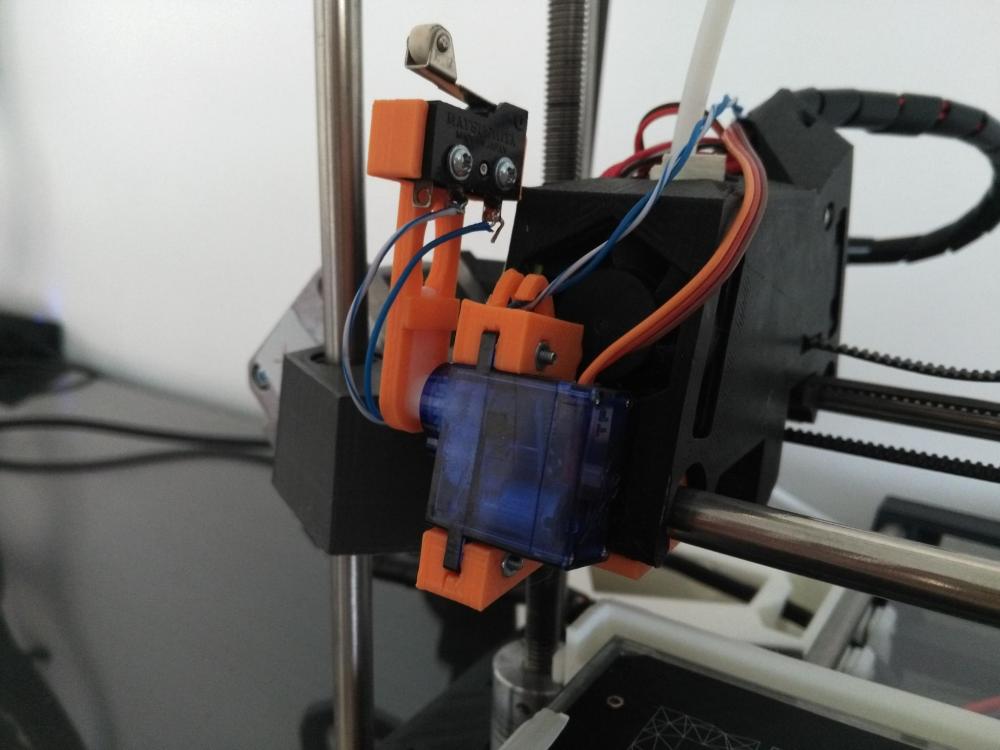
-
cura Paramètres Dagoma pour Cura 2.3
mmaura66 en réponse au topic de DelFr dans Paramétrer et contrôler son imprimante 3D
Merci pour ces conf ^ -
Bonjour, je m'appelle Mathieu, j'ai 40 ans. J'aime le biiiip, l'informatique, ma femme mes enfants et le biiiip. On vient de m'offrir une DiscoEasy 200, et je vais me lancer dans l'impression 3D.