Chercher dans la communauté
Résultats des étiquettes.
10 résultats trouvés
-

TRINAMIC, histoire, fonctionnement et autres joyeusetés des TMC2xxx
stef_ladefense a posté un sujet dans Tutoriels
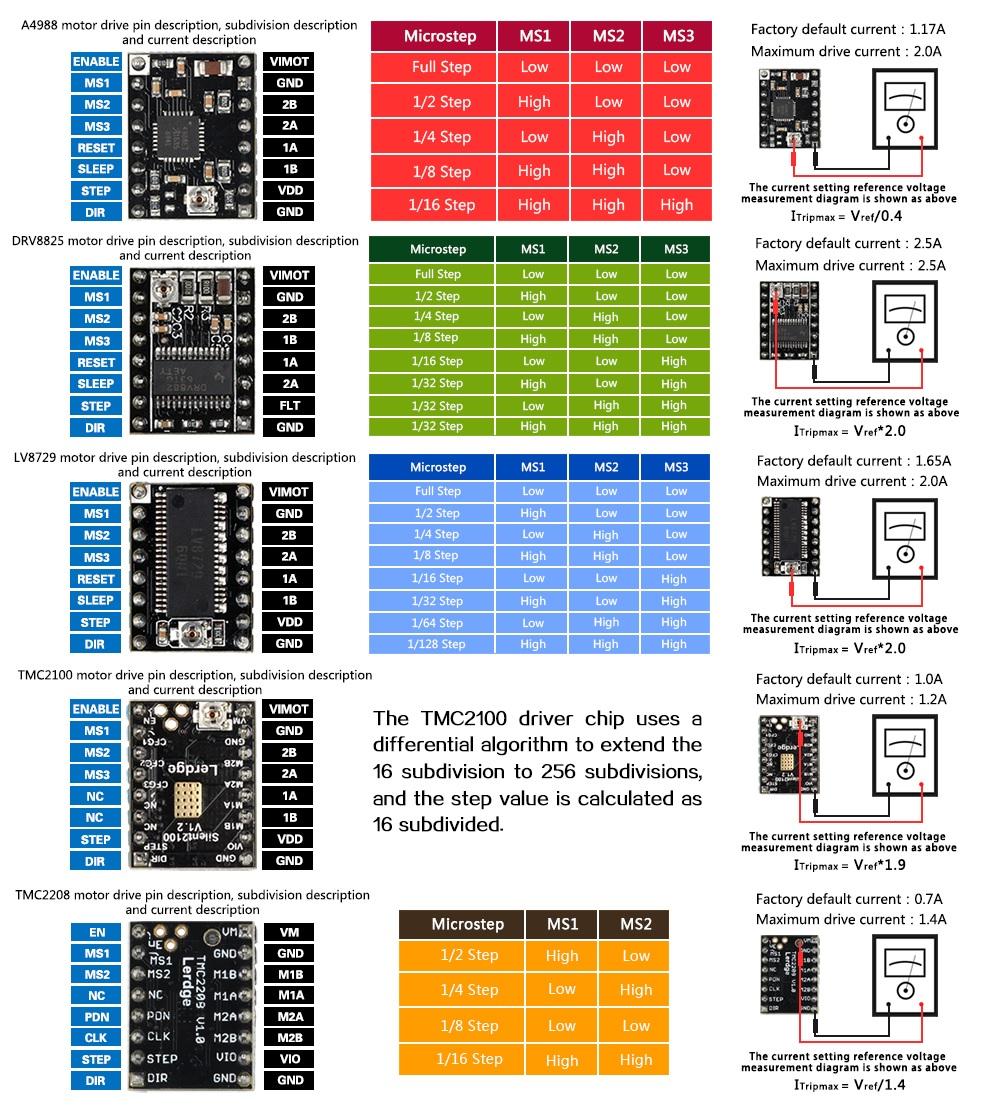
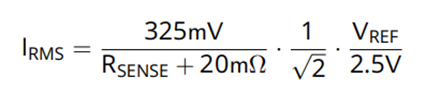
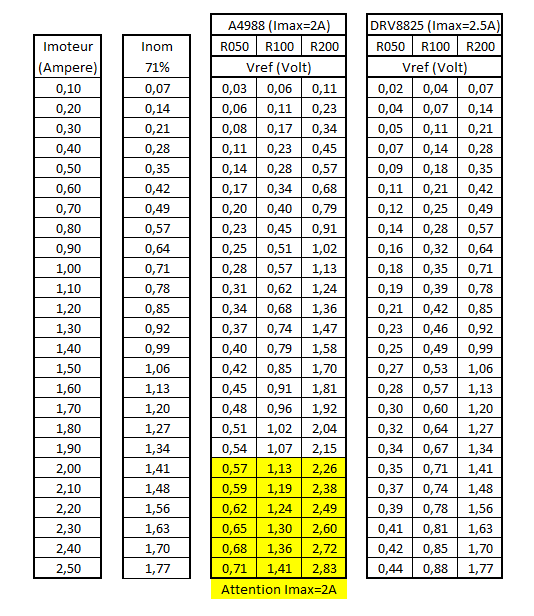
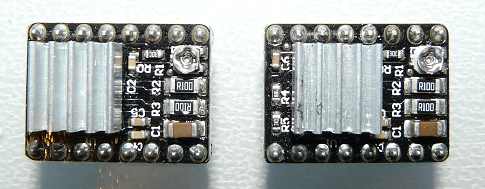
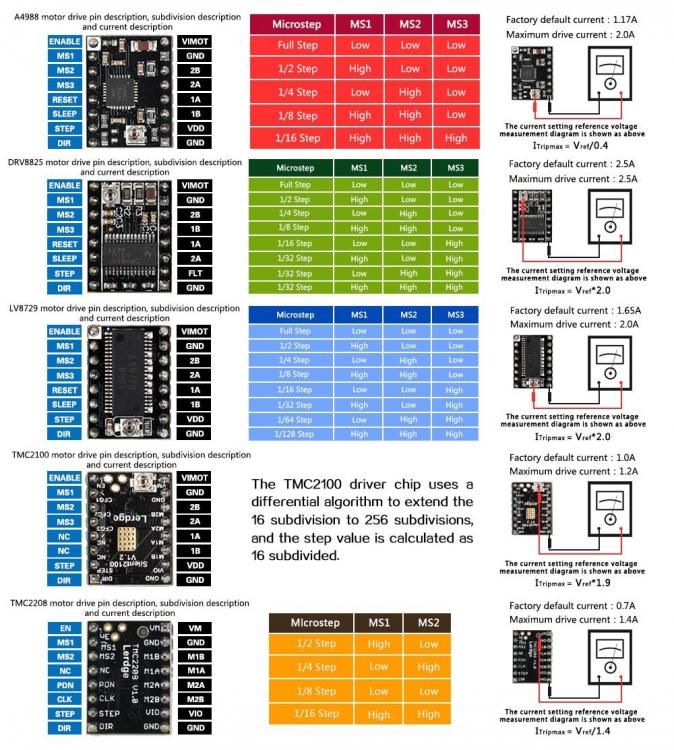
Bonjour à toutes et tous, Puisque ces questions reviennent régulièrement, je vais essayer d’expliquer comment utiliser les modules équipé de puce Trinamic de type TMC2xxx et comment les régler en fonction du courant consommé par le moteur. Petit historique : Faire tourner un moteur pas à pas n’est pas bien compliqué, quelques transistors et quelques lignes de code suffisent, par contre c’est du pur binaire avec pleins d’inconvénients, des accélérations brutale, vibrations et bruits d’ondes carrées caractéristiques. Dans les années 2000 Texas Instruments étudie un système de chip tout en un, qui regroupe, les générateurs de rampe PWM pour permette des micros pas, les étages de puissances, la régulation de courant, mais surtout une gestion logique interfaçable sur tous types de microcontrôleurs. Sorti en 2010 le DRV8825 comprends donc une intégration poussée tout en un et les bases du pilotage moderne avec 3 signaux logiques DIR, STEP et ENABLE. En 2012 Allegro sort sa propre version qui fonctionne sur des bases équivalentes, l’A4988. Depuis les années 90, Trinamic s’intéresse au contrôle du mouvement piloté et conçoivent une technologie de contrôle matériel et non plus logiciel, ce qui est essentiel pour avoir un fonctionnent des moteurs de manière efficace, fiable, fluide et silencieux. Peu à peu l’industrie plébiscite la précision de fonctionnement de leurs produits. Alors que l’explosion de l’impression 3D personnel est déjà bien débutée, Trinamic annonce mi 2015 son dernier circuit intégré de commande et de pilote de moteur pas à pas à un axe. Le TMC2100. Rapidement apparait sur le marché grand public un module équipé avec le TMC2100. D’une conception différente de ce qui existe alors, il apporte un pilotage bien plus optimisé et surtout silencieux, et sera suivi rapidement par des améliorations avec les TMC2208, TMC2209… etc. La forme actuelle des modules enfichable de 2 x 8 boches est certainement dû à la société Pololu qui à développer depuis les années 2000 pléthores de modules spécialisés robotique, faciles à changer en cas d’upgrade ou de destructions. Compatibilités et particularités des modèles Trinamic : Quand on regarde un module, la première chose qui saute aux yeux est l’absence de composant sur sa face supérieure, il n’est peuplé qu’au recto ! Pourquoi ? Parce que celui qui a dessiné le PCB a lu les notes technique du fabriquant ! Merci à lui ! Les puces Trinamic possède un pad thermique sous son boitier et est donc brasé en dessous du circuit imprimé ce qui a le mérite de laisser toute la place au verso pour le dissipateur thermique. La liaison thermique avec le dissipateur se fait via un double plan de masse percé d’une multitude de via traversant le circuit imprimé pour un échange thermique optimal, de loin beaucoup mieux qu’à travers l’époxy du boitier du composant. ATTENTION on trouve des modules qui utilisent des puces TMC22xx avec la puce sur le DESSUS ! N’achetez pas ça ! Elles sont instables ! Cette conception est de loin la meilleure approche en industrie et on en use et abuse presque pour tous composant qui chauffe, il est d’ailleurs dommage que l’A4988 n’en profitent pas, son pad thermique étant placé aussi sous son boitier… Encore un qui n’a pas lu les notes de conceptions, c’est dommage car on trouve toujours le meilleur dans les notes d’application, même le dessin optimisé du PCB pour tests. Sa deuxième particularité est qu’ils ont les sorties des enroulements moteur inversées. Rien d’insurmontable et nous avons au moins deux façons pour le gérer : Agir directement dans la source (Marlin,…) par la déclaration logique de l’inversion du sens de rotation de chaque moteurs, ou inverser le sens du connecteur du moteur, coté carte de contrôle ou coté moteur. Gestion de l’énergie ou les fameux modes StealthChop et SpreadCycle : StealthChop est le mode par défaut de fonctionnement silencieux du pilote, aussi bien à l'arrêt qu’à des vitesses faibles à modérées. C’est le mode préféré pour les axes X, Y et Z. SpreadCycle est le mode standard hautement amélioré par rapport aux DRV8825 et A4988, préférable pour le moteur de l’exdrudeur quand le mode Linear Advence est utilisé ou quand de très hautes vitesses sont nécessaires, ces dernières sont rare sur nos machines à la maison. Leurs mises en place dépendent du pilote : TMC2100 est dit Standalone (autonome) et n’est pas pilotable, sa configuration est confiée aux signaux CFG1 et CFG2. TMC2130 est utilisable en Standalone mais c’est surtout qui soit pilotable par bus SPI qui le caractérise, en mode standalone c’est qu’un équivalent TMC2100 avec configuration via CFG1 et CFG2. L’utiliser seulement si la carte de l’imprimante le supporte. TMC2208 est utilisable en Standalone, avec ou sans une configuration avancé via l’écriture dans sa mémoire OTP, ou par UART (RS232). Il utilise le mode StealthChop par défaut, pour le passer en mode SpreadCycle il faut soit, écrire dans sa mémoire OTP (Programmable qu’une fois, aucun retour en arrière possible), soit le piloter en mode UART. TMC2209 est utilisable en Standalone, par UART chainable (par 4) et/ou OTP. Il possède en outre une broche SPREAD de configuration hardware qui permet de le faire travailler en mode StealthChop (LOW) ou SpreadCycle (HIGH). Upgrade ? Changer de pilotes vers des TMC vont donc apporter une gestion des moteurs optimisée par rapport aux pilotes de base, même en standalone et aussi jouer sur le bruit, ou plutôt le silence, généré par les moteurs, la contrepartie c’est que l’on s’aperçoit vite que les ventilateurs sont bruyants… très bruyants, trop ? A l’heure actuelle, autant utiliser le TMC2209 qui est le mieux optimisé, plus souple à utiliser et permet des pointes de courant jusqu’à 2.8A. Mais si vous avez un lot de 2208, voire de 2100 utilisez les ! Si vous utiliser le mode Linear Advence, il est préférable de configurer le pilote de l’extrudeur en mode SpreadCycle. L’optimisation StealthChop génère alors trop de problème de régularité. Si vous êtes équipé en TMC2100, une patte à couper, un bout de fil et une brasure va solutionner le problème pour l’extrudeur. Avec un TMC2208, on trouve des modules pour programmer sa mémoire OTP, c’est une usine à gaz car il faut souvent relier un pont de soudure sous le 2208 pour pouvoir communiquer avec ! C’est expliqué sur le site de Watterott. Attention écrite dans sa mémoire OTP est définitif, aucun retour en arrière possible ! Avec une TMC2209, c’est prévu via une broche ou un pont de brasure. Une autre solution c’est de simplement utiliser le pilote d’origine (A4988 ou DRV8825 avec sa Vref réglée correctement là aussi). La Vref : Allez donc faire un tour sur mon post dédier dans un premier temps. La Vref, ou tension de référence, sert au pilote à générer en interne le courant maximum qui passe dans le moteur, il est important de la régler correctement. Trop faible, le moteur va perdre des pas, trop fort il va vibrer et beaucoup chauffer. Pour mesurer ce courant, le pilote utilise des résistances de faible valeur, incluses dans la boucle de contre réaction de l’alimentation du moteur, la tension a ses bornes est égale à sa valeur multipliée par le courant la traversant (U=R*I), ce sont les fameuse Rsense. Pour les pilotes équipés des puce Trinamic TMC2xxx, ces résistances font généralement 110mΩ (notée R110 sur leur boitier) et ce n’est pas complètement par hasard, nous le verrons plus bas. Mais il arrive (chez Creality entre autre) qu’elle fasse 150mΩ (R150), chacun est libre ! Trinamic fourni (tout comme ces homologues) la formule de calcul dans les appnotes de ses puces. Cette formule est : Le courant est exprimé en RMS (de l'anglais root mean square), c’est la valeur efficace d'un signal périodique, correspondant en électricité et en mode sinusoïdal à Irms = Imax / Racine(2). Nous pouvons donc écrire : Vref = Irms * (Rsense+20)/325 *2.5 * Racine(2) Prenons le cas où Rsense est égal à 110mΩ (110+20)/325 = 0.4 et 0.4 * 2.5 = 1 Avec Rsense à 110 mΩ ça simplifie le calcul, on comprend ce choix de valeur maintenant ? donc Vref = Irms * Racine(2) hors en mode sinusoïdal : Irms = Imax / Racine(2), donc on remplace : Vref = Imax * Racine(2) / Racine(2) ce qui donne Vref = Imax Imax c’est le courant max du moteur (peak). En électronique on n’utilise jamais le max, ça chauffe voir ça brule, des fois ça explose, par compromis on utilise souvent une fourchette entre 70% et 80%. Puisque nous somme en mode sinusoïdale autant utiliser 1 / Racine(2) qui est proche de 71%. On règle Vref à la valeur de Imax / Racine(2), exemple pour un courant de 1.5A, Vref = 1.5 * 0.707 = 1.06V. ATTENTION cette simplification du calcul n’est valable qu’avec Rsense = 110mΩ Prenons maintenant une valeur de Rsense = 150mΩ Irms = 325 / (Rsense+20) * 1 / Racine(2) * Vref / 2.5 Vref = Irms * (Rsense+20) / 325 *2.5 * Racine(2) Comme précédemment on remplace Irms par Imax / Racine(2) et on vire Racine(2) / Racine(2) Vref = Imax * (Rsense+20) / 325 *2.5 on peut écrire * 2.5/325 -> / 325/2.5 -> / 130 Vref = Imax * (Rsense+20) / 130 Prenons par exemple Imax = 1.5A Vref = 1.5 * (Rsense+20) / 130 Vref = 1.5 * 170 / 130 = 1.96 Régler donc Vref à 1.96 / Racine(2) = 1.39V Simple non ? On peut bien sûr régler Vref dans la fourchette jusqu’à la valeur de Imax. Plus on s’en approche, plus le couple sera important et plus le moteur va chauffer, En cas de masse lourde à déplacer, augmentez Vref, mais faites-le en commençant de la valeur calculée et en augmentant par palier de 0.1V sans dépasser Vref max. Ce n’est jamais une bonne idée d’augmenter Vref à cause d’une mauvaise mécanique qui force. Feuille Excel pour calculer Vref, renseignez la valeur de Rsense et le courant Imax du moteur et hop ! TMC_Vref_V2.xlsx Réglage du Vref au multimètre : Un petit tournevis plat adapté (parfois livré avec les pilotes) un multimètre en calibre 2V un bout de fil fin et souple. En premier lieu, éteindre la machine avec son interrupteur. Trouvez une masse (sur un bornier d’alim par exemple) et y fixer la pointe de touche négative (noire) dessus. Dénudez 5cm de chaque côté du fil fin, l’enroulez d’un côté sur la pointe de touche positive (rouge) et de l’autre sur la partie métallique du tournevis. Un bout de scotch aiderait à tenir certainement. Déconnectez un par un en les repérant les connecteurs qui vont aux moteurs. Allumez la machine. Réglez chaque potentiomètre à la valeur Vref calculée, attention à la position des dissipateurs thermique, les coller en fonction d’où se trouve le trou de réglage pour ne pas être gêné par la suite. Éteindre la machine avec son interrupteur. Remettre les connecteurs moteurs à leurs emplacements d’origine et dans le bon sens. Déconnectez la pointe de touche du multimètre et resserrez éventuellement le bornier qui l’a accueilli. ATTENTION Si le moteur est relié au pilote lors du réglage, vous risquez fortement de détruire le pilote, la carte peut aussi être détruite. Note sur le mode UART : Pour l’instant ce mode n’est véritablement pas encore utilisable avec Marlin. Ce n’est pas suffisamment mûr dans le code pour piloter les moteurs en temps réel via UART ou SPI et quand ça sera possible, ça le sera seulement sur des cartes 32 bits à cause de la puissance de calcul requise. La seule chose qui ne fonctionne pas trop mal c’est de configurer les pilotes via le soft. On les initialise au démarrage avec leur Vref et leur mode de fonctionnement, mais c’est assez compliqué à mettre en œuvre, en mode UART, il faut obligatoirement utiliser des ports supportants les interruptions pour que SoftSerial fonctionne, mais ces ports non utilisés sont limités. Avec des TMC2208, c’est un port par module (on peut utiliser la même pin pour TX et RX), avec un TMC2209, on peut chainer 4 module en parallèle sur le même port). Personnellement je testerais certainement un jour le pilotage de TMC2209, avec le chainage c'est intéressant niveau port libre, ce qui simplifiera la mise en œuvre. Par contre quand je vois le nombre de problèmes ouverts sur le Githup Marlin je suis presque sûr d’essuyer les plâtres, donc à voir quand ça sera stabilisé. De plus il est rare de revenir sur ces réglages, à moins d’un changement de pilotes ou de moteurs.
- 23 réponses
-
- 11
-

-

-

-
Bonjour à toutes et tous, J’entends souvent beaucoup de choses sur le réglage des drivers moteurs, bien souvent on me parle d’un réglage usine hypothétique, ou à l’oreille ou lors des nuits de pleine lune quand le vent souffle à l’ouest ! Je lis souvent « moi j’ai une Vref à 1.6V » et ça ne veut rien dire car il manque des informations capitales ! Le courant généré peut passer du simple au double ou même être hors limite si les modules ne sont pas strictement identiques ! Donc NON, le réglage de la tension de référence (Vref) sur un driver de moteur pas à pas ne se fait pas de manière empirique ! Il faut absolument connaitre plusieurs caractéristiques pour régler correctement ces bestioles. - Coté driver, le circuit utilisé A4988 ou DRV8825 a son importance et va surtout de pair avec la valeur des résistances « Rsense » qui sont présentent sur le PCB, elles-y sont souvent sérigraphiées « S1, S2, S1X, S2X, R1, R2…», et peuvent avoir comme valeur 0.05 ohm (Marquage R050), 0.1 ohm (R100) ou 0.2 ohm (R200) donc on sort la loupe pour être sûr. - Coté moteur, il faut chercher son courant de fonctionnement par phase (Imax) qui a été calculé par le fabriquant en fonction de ses caractéristiques. Si ce courant n’est pas indiqué par le vendeur du moteur, on cherche chez SON fabriquant avec SA référence dans son datasheet. Sous-alimenté, il va perdre son couple et risque même de vibrer sans pouvoir garder sa position stable. Suralimenté, il va faire beaucoup de bruit par résonance et bien entendu surchauffer (le driver également par contre réaction). Après une longue discussion avec un constructeur de moteur de type Nema (GE), il s'avère que le Imax d'un moteur n'est pas son Inominal, il faut donc diviser Imax par racine de 2 pour trouver Inom. j'ai donc mis à jour le tableau en correspondance. On calcule donc la valeur de Vref à régler avec le petit potentiomètre, la formule est donnée dans le datasheet du constructeur du driver, et est : on calcule Inom = Imax divisé par racine(2) Pour un A4988 : Inom = Vref / (8 * Rsense) donc Vref = Inom * 8 * Rsense Pour un DRV8825 : Inom = Vref / (5 * Rsense) donc Vref = Inom * 5 * Rsense La valeur maximale de la limitation de courant est donc définie en interne en fonction de la valeur des Rsense et de la tension de la broche Vref. Exemples de calculs : Un A4988 avec des Rsense de 0.05 ohm (Marquage R050) et un moteur avec un Imax à 1.8A, Inom = 1.27A : Vref = 1.27 * 8 * 0.05 = 0.51V. Un DRV8825 avec des Rsense de 0.1 ohm (Marquage R100) et un moteur avec un Imax à 2.1A, Inom = 1.48A : Vref = 1.48 * 5 * 0.1 = 0.74V. Un A4988 avec des Rsense de 0.2 ohm (Marquage R200) et un moteur avec un Imax à 1.5A, Inom = 1.06A : Vref = 1.06 * 8 * 0.2 = 1.7V. Important : Le courant maximum par phase pour un A4988 est de 2A et 2.5A pour le DRV8825. Donc si vous êtes dans la limite haute de votre drivers, réduisez un peu Imax. La température du driver peut monter à plus de 150°C si son courant arrive à son maximum admissible et il doit être de toute façon correctement refroidit par un dissipateur et si possible par un flux d’air au-delà de 1A par phase. Il passera en protection thermique et coupera le courant moteur si sa température arrive hors limite. Voir les datasheets pour les courageux, dont les tableaux « Relative Current and Step Directions » et « Step Sequencing Settings ». http://www.allegromicro.com/~/media/Files/Datasheets/A4988-Datasheet.pdf http://www.ti.com/lit/ds/symlink/drv8825.pdf Pour les TMC2xxx, il suffit de prendre Inom du tableau et de régler Vref à la même valeur. ex moteur 1.5A, Inom = 1.06A, Vref = 1.06V attention ceci n'est valable que pour Rsense = 110mΩ la formule donnée par Trinamic est IRMS = 325mV / (RSENSE + 20mΩ) * 1/√2 * VREF/2.5V avec des RSENSE = R110 = 110mΩ nous simplifions puisque 325/(110+20) = 2.5 (c'est pour ça que l'on trouve les pilotes avec ces valeurs de RSENSE sur le marché) IRMS = 2.5 * 1/√2 * VREF/2.5V 2.5 / 2.5 = 1 donc IRMS = 1/√2 * VREF je me débarrasse de 1/√2 en multipliant par √2 des deux cotés √2 * IRMS = √2 * 1/√2 * VREF donc √2 * IRMS = VREF VREF = √2 * IRMS et nous savons que IRMS = IMAX / √2 VREF = √2 * IMAX / √2 donc VREF = IMAX comme on prends 70% par sécurité, pour un courant de 1.5A, nous avons 1.5*0.7 = 1.05, réglage de VREF à 1.05V et ça tombais bien, puisque en prenant 70% de sécurité, c'est comme si on divisais par √2 (0.707...) c'est une astuce d'électronicien c'est comme si en prenant 70% de sécurité, on prenait la valeur RMS de ce courant IMAX pour simplifier, avec 70% de sécurité, IMAX * 0.707 = IMAX / √2 = IRMS donc on peut régler VREF à la valeur APPARENTE de IRMS, sous entendu que ça contient déjà les 70% de sécurité. mais ça ne fonctionne qu'avec des RSENSE à 110mΩ vous trouverez un XLS pour ces calculs, vous pouvez y changer Rsense si ça valeur n'est pas standard. ATTENTION les TMC sont hyper sensible à la température, ils doivent impérativement être refroidit sous un courant d'air, avec un dissipateur conséquent. Bonne lecture. Stef le tableau corrigé pour avoir une idée de Vref en fonction des valeurs d'Imax du moteur. TMC_Vref_V2.xlsx
- 193 réponses
-
- 14
-
-
-
-
Bonjour Je cherche a changer les drivers d'origine de mon imprimante (A4988) par des TMC2208 ou des TMC2100. J'ai fais pas mal de recherche mais je suis débutant et j'ai peur de me tromper. Je ne trouve pas non plus les réponses à mes questions sur le forum. C'est pour cette raison que je demande votre aide. D'après ce que j'ai compris, le design des drivers pour carte mère makerbot n'est pas habituel pour le sens des broches. Le PCB est inversé. Donc 1er question : Quel driver est le plus adapté a mon imprimante? Les TMC2208 ou TMC2100? Je ne trouve pas de TMC2208 avec le bon design. Est ce que je dois acheter le driver sans broches et les souder moi même pour avoir les broches du bon coté ou est ce qu'il existe TMC2208 déjà tous fait pour makerbot que je n'aurais pas trouvé malgré toute mes recherches? Pour les TMC2100 j'en ai trouvé avec le bon design mais ils n'ont pas de vis de réglage du vRef... Donc comment regler le vRef avec ces drivers? Merci de votre aide.
-

TMC2100 Quel mode de fonctionnement ?
Lubudik a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour tout le monde, J'ai une question à poser. J'ai vu que sur le forum elle avait déjà été posée le 29/12/2017 (tiens ? Le jour de mon anniversaire)… mais aucune réponse n'a été donnée. Quel mode de fonctionnement du TMC2100 adopter sur une CR-10 avec la carte MKS Gen 1.4 ? - le mode StealthChop : plus silencieux mais moins de couple ou - le mode StradCycle : un peu plus bruyant mais plus de couple Si quelqu'un a des conseils, je suis preneur. Bien à vous tous -
Bonjour, J'ai acheté cet ensemble Mks gen L v1.0 + Drivers TMC2100 + Ecran tactile TFT 28 V3.0 pour installation sur Ender 3, et je l'ai reçu le 12 juillet. Je vais recevoir le 25/07 une Prusa I3 MK3, ce qui rend cet achat inutile. Je revends le tout à un amateur intéressé pour 50€ alors que la valeur d'achat (voir copie écran ci-dessous) est de 94,48 € ! PROFITEZ DE L'AFFAIRE (je prends les frais de port à ma charge) Règlement sur Paypal, et expédition dans la foulée ... PS (et PJ) : pour ce qui est de mon sérieux, vous pouvez voir en PJ ma cote sur PRICEMINISTER ....

-
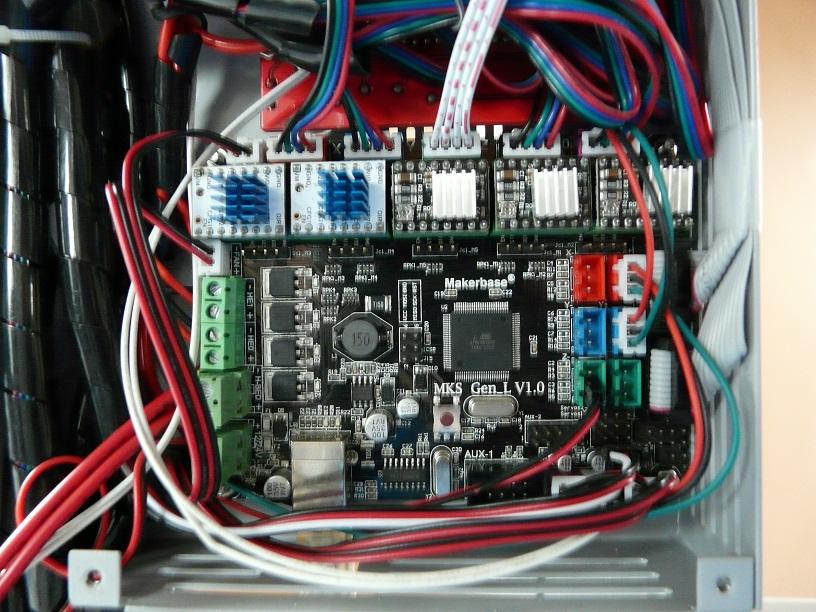
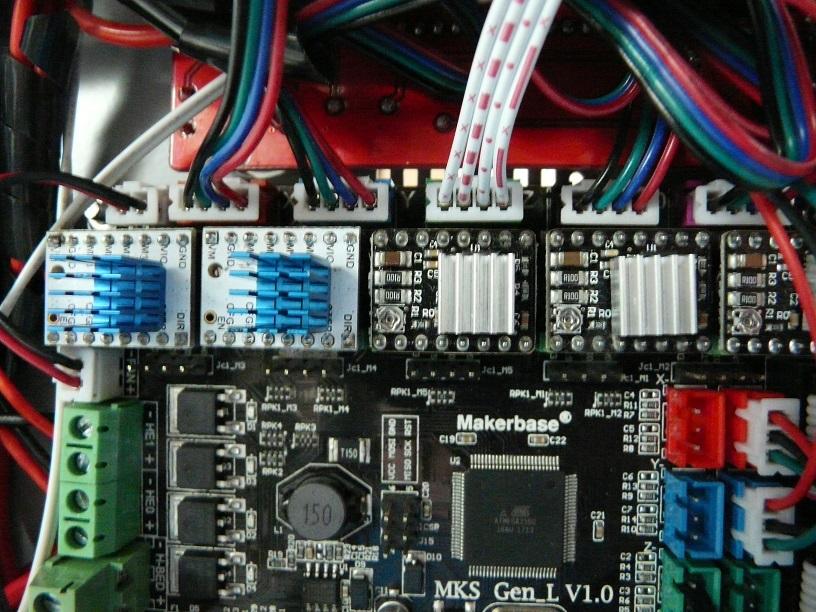
Salut ! Après avoir tester la Tornado, il apparait que si les DRV8825 sont nettement plus silencieux que les A4988, ils n'en restent pas moins audibles ... Je voulais aussi améliorer le rendu et je m'étais posé la question de mettre des smoothers. Tant qu'à ouvrir la bête, j'ai préféré remplacer les steppers DRV8825 par des TMC2100. Cela m'évite d'installer des smoothers. Je n'ai fait (pour l'instant) que les steppers X et Y qui sont ceux qui donnent le maximum de rendu. Le sujet a déjà été traité ailleurs dans ce forum, mais voici un rappel du montage de ces TMC2100. Les TMC2100 et les DRV8825 se montent dans le même sens, et donc dans le sens contraire du A4988. Cela a son importance si on ne veut pas tout cramer. J'ai prévu 2 séries de TMC2100 : - Les TMC2100 en StealthChop (configuration par défaut : zéro bruit mais couple plus faible), - Les TMC2100 en SpreadCycle (CFG1 soudé : silencieux et couple plus important). L'idée est de tester les TMC2100 de base et voir si il y a des pas qui sautent. Je suis parti sur l'idée que sur une CoreXY, les 2 moteurs servent au mouvement ... De base, les TMC2100 sont configurés à 0.47v, ce qui est très bas. Je les ai monté à 0.8v, comme lu sur beaucoup de tutoriels. J'ai constaté des pertes de pas (et cela s'entend à l'oreille par un bruit pas "souple"). J'ai ensuite mis les TMC2100 à 1.1v. Là, je n'ai constaté aucune perte de pas. J'en suis à mes premières impressions, donc l'avenir me dira si cela est stable. Je vous tiendrai au courant. Pour info, toutes les mesures (et donc réglages) doivent être fait avec les moteurs déconnectés (sur la carte mère dans mon cas). C'est dit ... Pour info, ces steppers chauffent beaucoup. En fonctionnement, un radiateur de DRV8825 est chaud, un radiateur de TMC2100 vous brûle. Le ventilateur de la carte-mère de la Tornado est donc le bienvenu. Bien entendu, soit on inverse la connectique au cul du moteur, soit on modifie le firmware pour inverser le sens du mouvement X et Y (les TMC2100 ont une logique inverse). Pour ma part, modification du firmware (configuration.h) : #define INVERT_X_DIR true (au lieu de false) #define INVERT_Y_DIR true (au lieu de false) #define INVERT_Z_DIR true Et on modifie les steps/mm, car le DRV8825 est en 1/32 alors que le TMC2100 est en 1/16 : Toujours dans configuration.h : #define DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, 1600, 188 } au lieu de { 160, 160, 1600, 188 } On peut aussi modifier ces paramètres dans l'interface de l'imprimante. Si on ne fait pas cette modification, 100mm demandés deviennent 200mm, et au premier AutoHome, la tête va s'exploser dans la barre du fond (vécu ...). Voici quelques photos de l'intérieur : Pour ceux qui veulent régler leur DRV8825 au petits oignons et qui n'ont pas de loupe : les DRV8825 sont en R100. J'ai imprimé quelques pièces de tests : le résultat est bluffant ! Aucun bruit des moteurs ... plus aucune vibration même lors de changement rapide de direction de la tête ... seul le ventilateur de la tête est audible (prochaine modif ) ! En gros, ces TMC2100 et le ventilateur de la tête changé = imprimante totalement silencieuse. Le résultat de l'impression est une nette amélioration de la qualité et du rendu. Je vous mettrai quelques photos plus tard. Verdict sur le TMC2100 : "must have" ("forcément nécessaire").
-
Salut à tous, Voilà quelques temps que cette idée me trotte dans la tête et j'ai bien envie d'améliorer ma petite méga. Dans un premier temps ça passera par l'écran MKS et le merlin officiel grâce aux supers tutos de @Murdock. Ensuite, j'aurai pensé à plusieurs modifications et j'aurai quelques questions et aurai aimé avoir vos avis. Mettre des TMC2100 pour gagner en bruit mais apparemment ils sont plus sensible à la chauffe. Donc il faut surement rajouter un ventilo et il faudra trouver le bon réglage. Ensuite je voudrais aussi installer un piezo pour faire le bed levelling et ainsi pouvoir changer de taille de buse sans tout re-regler à chaque fois. Et enfin j'envisage de passer au multicouleur en rajoutant un (ou deux) extrudeur(s) mk8 et en installant l'une de ces 2 tête d'impression et faire un système dans le style de la mk2 originale. https://fr.aliexpress.com/item/Hot-12v-24v-Cyclops-and-Chimera-Extruder-2-In-1-Out-2-colors-Hotend-Bowden-with/32796885685.html?spm=a2g0s.13010208.99999999.372.VLQBmx ou en trois entrées https://fr.aliexpress.com/item/Newest-3D-Printer-Parts-3-in-1-out-Multi-color-Extruder-Hotend-Kit-NF-THC-01/32813067592.html?spm=a2g0s.13010208.99999999.379.VLQBmx Mais pour le multicouleurs je suis moins sûr de la faisabilité. Sera-t-il possible de faire une tour de purge grâce au trancheur (normalement oui au prix de quelques cheveux). Mais aussi au niveau de la carte Trigorila je crois qu'il y a une entrée pour le second extrudeur donc normalement pas de soucis de coté là, mais est-il possible de commander trois extrudeurs? C'est beaucoup moins sûr. Voilà merci pour vos conseils et avis.
-
Ici, le même article sur les firmwares mais équipés entièrement de TMC2100 (ou TMC2208). Je n'ai pas testé le TMC2208 mais il utilise les mêmes fonctions que le TMC2100. Pour les fonctions avancées du TMC2208, je ferai une version spécifique plus tard. Firmwares 1.1.8 (tmc2100 & BL-Touch): Flyingbear Tornado, 1 Extrudeur, BL-Touch, Steppers TMC2100 (x4) : Marlin-Tornado_1E_Auto_TMC2100_v1.1.8_EN_by_TMT.zip Flyingbear Tornado, 2 Extrudeurs, BL-Touch, Steppers TMC2100 (x5): Marlin-Tornado_2E_Auto_TMC2100_v1.1.8_EN_by_TMT.zip Firmwares 1.1.8 (tmc2100 & Z-switch): Flyingbear Tornado, 1 Extrudeur, Switch Z, Steppers TMC2100 (x4) : Marlin-Tornado_1E_Zswitch_TMC2100_v1.1.8_EN_by_TMT.zip Flyingbear Tornado, 2 Extrudeurs, Switch Z, Steppers TMC2100 (x5) : Marlin-Tornado_2E_Zswitch_TMC2100_v1.1.8_EN_by_TMT.zip
- 6 réponses
-
- 1
-
-
- flyingbear
- tornado
- (et 4 en plus)
-
-
Salut à tous ! Ma BW fonctionne plutôt bien maintenant que j'ai viré ce qui n'allait pas. Cependant elle loge dans mon salon est fais pas mal de bruit ! Je viens de commander des SilentStepStick TMC2100 chez watertott pour la rendre plus silencieuse mais également pour enlever les défauts "peaux de saumon" que j'ai sur mes pièces. Je les recevrai bientôt et je vous ferai un retour ! Stay tuned !