
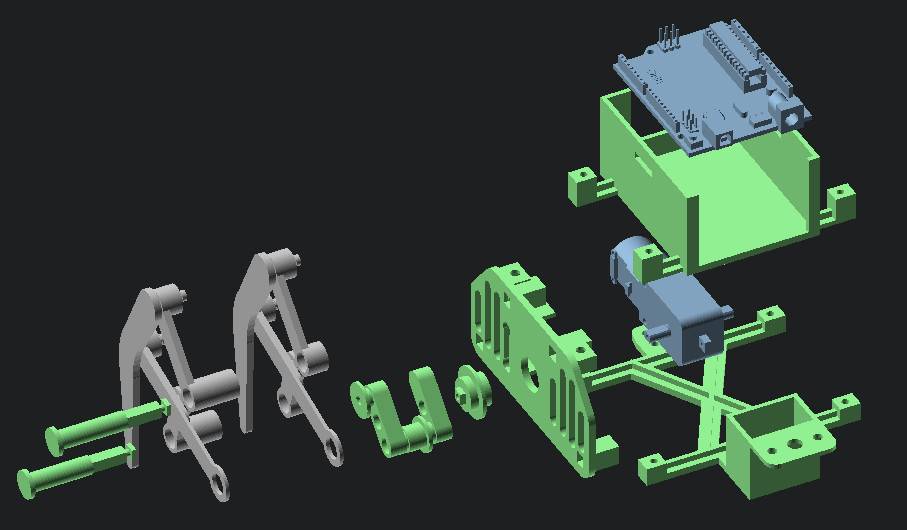
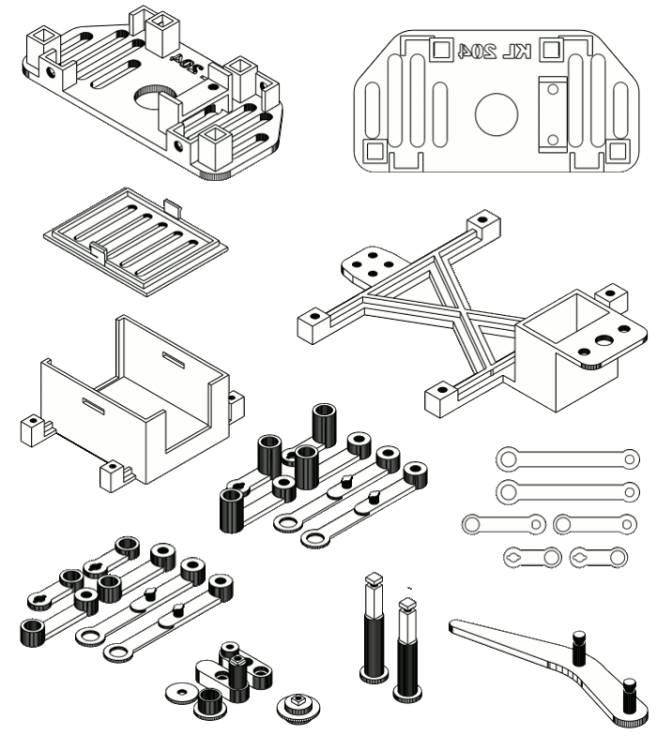
J'ai crée ce robot octopode se base sur le mécanisme de Klann. Il s'agit mécanisme plan conçu pour simuler l'allure d’un animal à pattes et remplacer la roue. Le mécanisme se compose d’une "jambe" qui entre en contact avec le sol, d’une manivelle, de deux culbuteurs, et deux bielles, le tout relié par des liaisons pivotantes.
Il a été conçu sur OpenSCAD et imprimé avec une Creality CR-20
Plus de détails et fichiers stl sur mon site robotix.ah-oui.org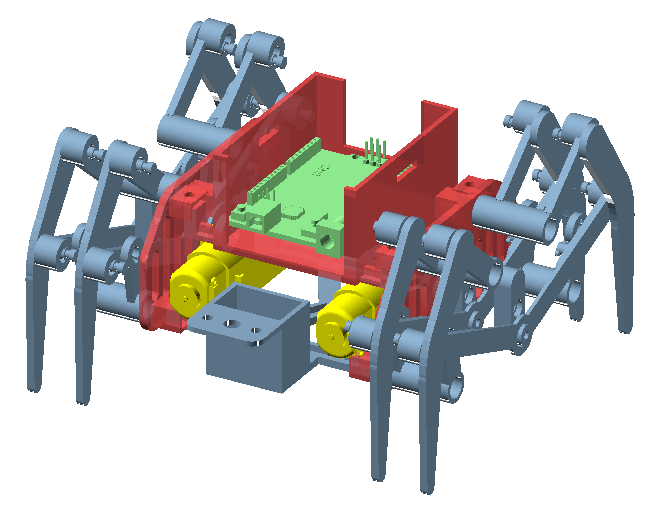
- Album created by roberto
- Mis à jour
- 1 image
- 1 508 vues
0 Album Comments
Aucun commentaire à afficher.