taratata
-
Compteur de contenus
114 -
Inscrit(e) le
-
Dernière visite
Récompenses de taratata
")





-

Gérer le ventilo extruder
taratata en réponse au topic de taratata dans Discussion sur les imprimantes 3D
merci à tous -
Gérer le ventilo extruder
taratata en réponse au topic de taratata dans Discussion sur les imprimantes 3D
comment peut-on gérer un ventilateur sur le bornier 12/24v en haut à gauche de la SKR 1.3 (à gauche du bornier pour le moteur X)?
-
Gérer le ventilo extruder
taratata en réponse au topic de taratata dans Discussion sur les imprimantes 3D
ou trouve t-on la configuration par défaut (dans Marlin) du bornier "FAN" ? remibora, qu’entends tu par un transistor piloté par le microcontrôleur? -
Gérer le ventilo extruder
taratata en réponse au topic de taratata dans Discussion sur les imprimantes 3D
merci fran6p -
Gérer le ventilo extruder
taratata en réponse au topic de taratata dans Discussion sur les imprimantes 3D
Merci remibora, pour l'info de la version du firmware. je suis passé sur la version 2.0.9. Le ventilateur heatbreak est sur #define E0_AUTO_FAN_PIN P2_04 #define EXTRUDER_AUTO_FAN_TEMPERATURE 50 puis, simplement branché le ventilateur dédié au refroidissement du filament en sortie de buse sur la borne FAN (FAN_CNC) pin 2.3. le ventilo est dispo via Repeiter-host ou par les commandes M106 P1 S50 M107 P1 En branchant le ventilo sur le bornier 12/24v à gauche du bornier dédié au moteur X, le ventilo tourne mais pas d'accés au commandes GCODE M107 ou M106. quel solution s'il vous plaît? merci de votre temps -
Gérer le ventilo extruder
taratata en réponse au topic de taratata dans Discussion sur les imprimantes 3D
donc le pin sur lequel je l'ai configurer, est pour le heatbreak. mon but est de gérer le ventilo à refroidir le filament déposé par la buse. alors il faudrait le configurer en pin 2.3? -
bonjour à tous, j'ai une skr 1.3 sans écran configurée avec la version Marlin-bugfix-2.0.x -- 020008. Je gère un seul extruder en HE0 pin 2.7 selon le PINOUT de la mainboard, on peut connecter un ventilateur en HE1 pin 2.4 puis configurer Marlin : identification du pin depuis le fichier ../Marlin-bugfix-2.0.x -- 020008 - C\Marlin\src\pins\lpc1768\pins_BTT_SKR_common.h section Heaters / Fans le pin 2.4 corrrespond à FAN1_PIN se paramètre est à reporter dans le fichier ../Marlin-bugfix-2.0.x -- 020008 - C\Marlin\Configuration_adv.h section @section extruder #define E0_AUTO_FAN_PIN P2_04 #define EXTRUDER_AUTO_FAN_TEMPERATURE 50 Effectivement, le ventilo s'enclenche une fois la température de seuil atteinte. la question est la suivante : comment gérer avec les deux commande GCODE M106 M107 le ventilateur. j'ai essayé : M107 pour l'arrêt, mais le ventilo continue toujours de fonctionner M106 P0 S50 pour diminuer sa vitesse de rotation, rien n'y fait. merci pour votre temps et de l'aide
-
Moteurs X et Y tourne lors de la cmc G1 X100 F4800
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
Je troune en rond ..... Moteur SL42STH40-1684A Step Angle 1.8° - 200 PAS par révolution (360°/1.8°) Step Angle Accuracy ±5% (full step, no load) Voltage 2.8V Current per phase 1.68A Rated Current – Courant Nominal Resistance per phase 1.65Ω Resistance accuracy ±10% Inductance per phase 3.2mH Inductance accuracy ±20% Holding torque 3.6 Kgcm (0.4 Nm - ) Moment of inertia 54 g/cm2 Orientation torque 150 g/cm Temperature rise 80°C max (rated current, 2 phases on) Ambient temperature -20°C ~ +50°C Insulation resistance 100MΩ min, 500VDC Shaft radial play 0.02 mm max (450g load) Shaft axial play 0.08 mm max (450g load) Max. radial force 28N (20mm from the flange) Max. axial force 10N Weight 0.28 kg Length 40 mm 1 bar = 10N/cm2 j'ai calculer le Vref du TMC2208 V3.0 selon ce forum de la personne suivante stef_ladefense. je joints mes fichiers Configuration.h et Configuration_adv.h du firmware Marlin-bugfix version 020008 #define X_CURRENT 1190 est calculer selon 1.68A/1.414 = 1.19A = 1190 mA les moteurs X et Y répondent bien en distance et Home individuel mais, j'obtient toujours echo:busy:processing puis l'erreur : Error:Printer halted. kill() called! [ERROR] Error:Printer halted. kill() called! même en testant #define INTERPOLATE false ou #define INTERPOLATE true Configuration.h Configuration_adv.h -
Moteurs X et Y tourne lors de la cmc G1 X100 F4800
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
j'ai fais des test avec les moteurs pas à pas SL42STH40-1684A dont le courant nominal est de 1.68A. J'ai configuré #define X_CURRENT 1190 un problème survient en mettant X_MicroSteps à 256. La distance parcourue ne correspond pas et en exécutant G28 X ou G28 Y j'obtient l'erreur Error:Printer halted. kill() called!. J'ai changer câbles (moteur & endstep), moteurs, TMC aussi, rien y fait. cette erreur n’apparaît plus si l'on descend à 16 ou 32 comme valeur pour la variable X_MicroSteps. comment configurer le TMC 2208 V3.0 à 256 PAS? merci pour votre temps. -
Moteurs X et Y tourne lors de la cmc G1 X100 F4800
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
dans Marlin - Configuration_adv.h, dois je spécifier le nombre de pas à 256 ou laisser à 16 à la ligne #define X_MICROSTEPS? #if AXIS_IS_TMC(X) #define X_CURRENT 600 // (mA) RMS current. Multiply by 1.414 for peak current. #define X_CURRENT_HOME X_CURRENT // (mA) RMS current for sensorless homing #define X_MICROSTEPS 256 // 0..256 #define X_RSENSE 0.11 #define X_CHAIN_POS -1 // -1..0: Not chained. 1: MCU MOSI connected. 2: Next in chain, ... //#define X_INTERPOLATE true // Enable to override 'INTERPOLATE' for the X axis #endif A quoi sert cette option? #define X_INTERPOLATE true -
Moteurs X et Y tourne lors de la cmc G1 X100 F4800
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
merci pour la solution qui résout le prob. -
Moteurs X et Y tourne lors de la cmc G1 X100 F4800
taratata a posté un sujet dans Biqu / BigTreeTech
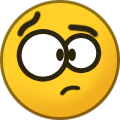
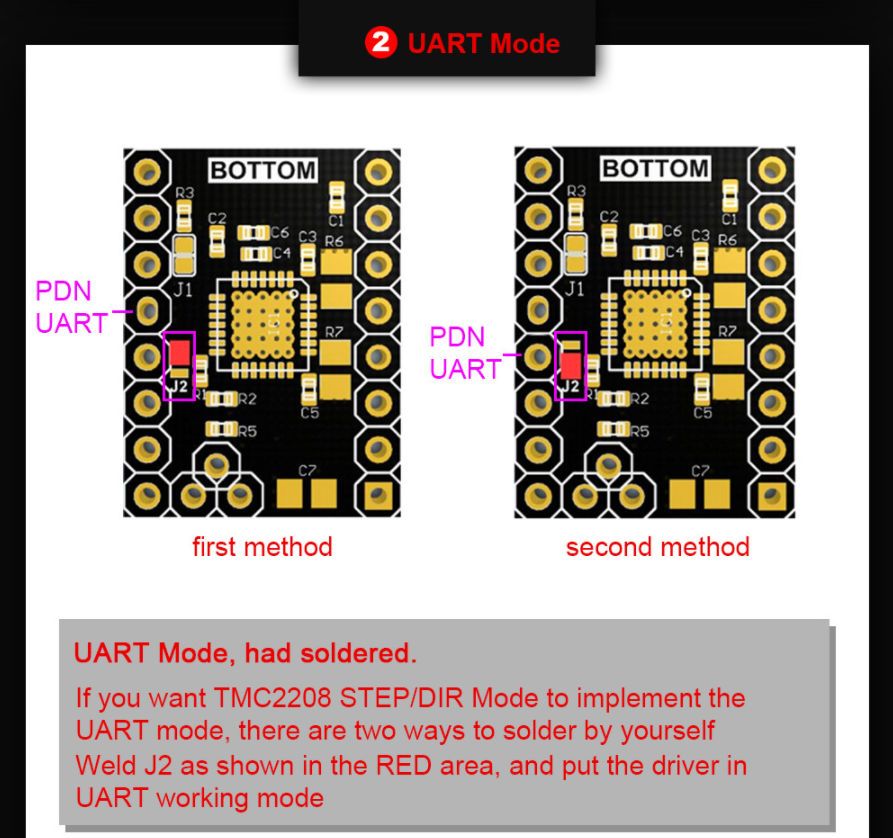
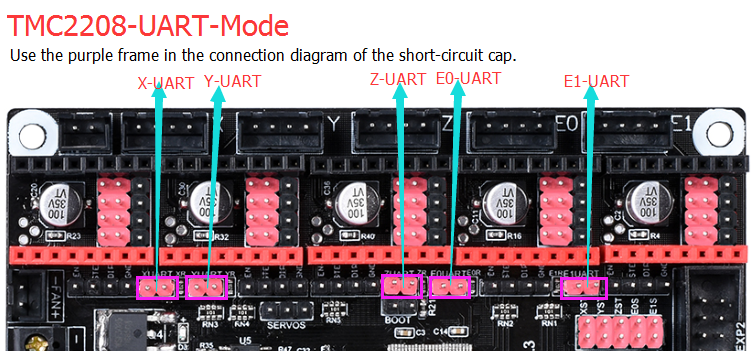
bonjour à tous, j'ai une SKR V1.3 avec en X & Y le driver TMC2208 V1.3 en mode UART. La configuration physique du mode UART sur le TMC est un point de soudure sur J2 comme indiqué sur cette image. La pose de jumper est faites sur les PINs X-UART et YUART comme indiqué sur cette image trouvez en pièce jointe les deux fichiers Configuration.h et Configuration_adv.h Depuis RepeiterHost, je lance la commande G1 Y100 F4800 les deux moteurs X & Y tourne ensemble. Après vérification de la configuration Marlin (FIRMWARE_NAME:Marlin 2.0.8), je ne comprends pas le problème... merci pour votre temps Configuration.h Configuration_adv.h
-
Identification du contrôleur TMC-2208
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
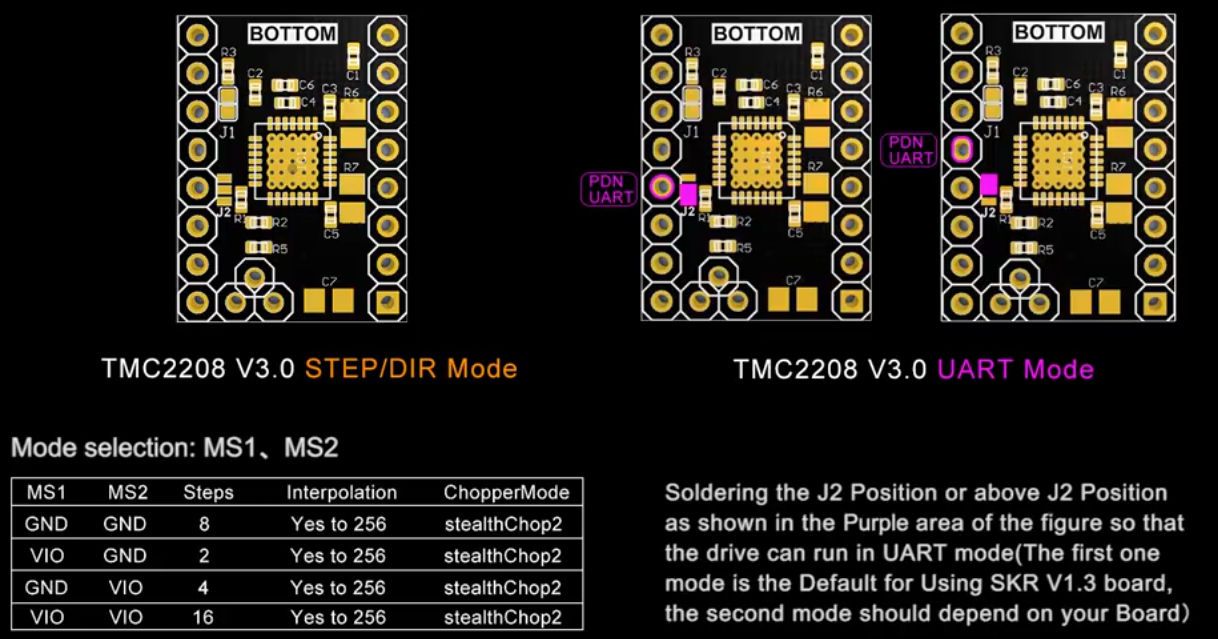
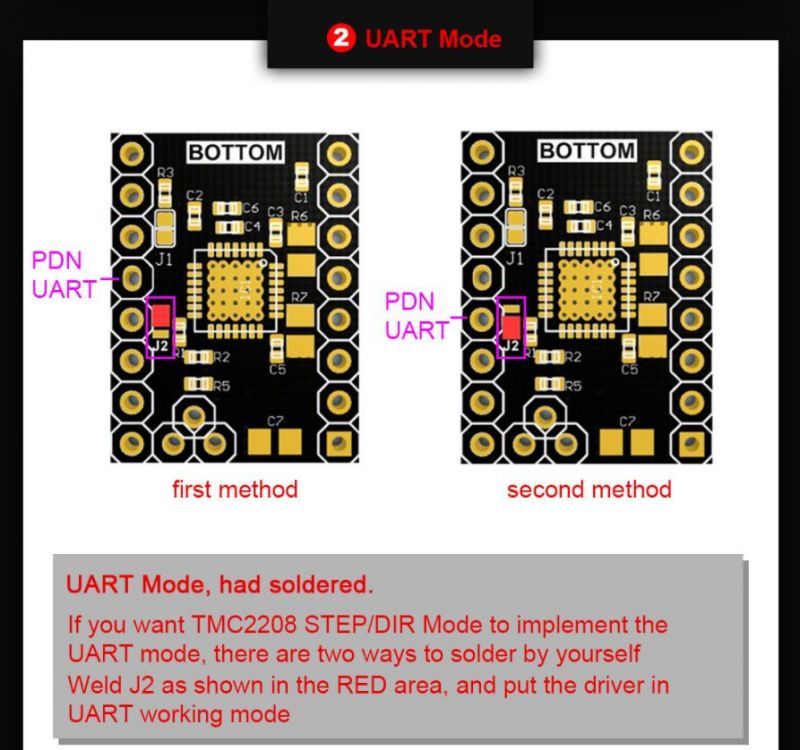
merci Tircown, c'est bien ce qu'il me semblait. il y a bien un différence entre souder les ceux du haut_milieu et souder les ceux du bas_milieu Alors bas_milieu est pour la carte SKR1.3 et haut_milieu autres carte ... lien -
Identification du contrôleur TMC-2208
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
Justement, le point de soudure J2 est confus. S'il n'y a pas de point de soudure, alors il est en mode STEP/DIR. (cela j'ai bien capté) Par contre, selon cette documentation et cette vidéo (1.35 minutes), c'est pas clair. il y a deux façons de raccorder J2 il semble que raccorder le pins du haut avec celui du milieu est le mode STEP/DIR et raccorder le pins du bas avec celui du milieu est le mode UART merci pour ta lumière, j'aimerai bien comprendre svp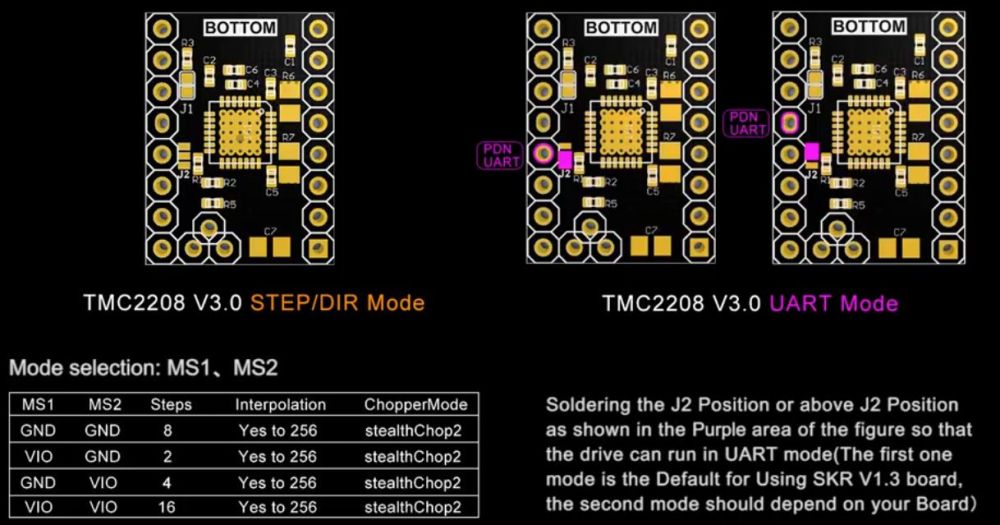
-
Identification du contrôleur TMC-2208
taratata en réponse au topic de taratata dans Biqu / BigTreeTech
d'après cette article, il semble que non (voir paragraphe --> Some modern modules have a three-pad jumper pre-configured for UART, along with three pins sticking up from the top.