


chrislam86
-
Compteur de contenus
22 -
Inscrit(e) le
-
Dernière visite
Récompenses de chrislam86
")





Favoris
-
marlin sous alfawise u20 et fonction M600
marlin sous alfawise u20 et fonction M600il y a 58 minutes, Aldo Dell'utri a dit :n aurais tu pas omis de decocher cette options /
// Add a menu item to move between bed corners for manual bed adjustment
//#define LEVEL_BED_CORNERSnon. Ce menu se situe dans Mouvement->Régler niv. lit->niveau des coins. Par contre, je n'ai pas modifié la ligne qui permet de vérifier le centre à la fin (voir infos ci dessous)
il y a 58 minutes, Aldo Dell'utri a dit :est ce que le tuto de egalistel que j ai affiche ci dessus est correct
Je serai tenté de dire oui mais obsolète. Tu peux suivre la partie installation de Visual studio jusqu'à 4:44. Après:(attention, le n° des lignes peut varier de qqs n°)
1- télécharge les sources + les fichiers de configuration (voir les liens dans ce message).
2- Après avoir décompressé les 2 fichiers, tu copies le dossier marlin 2.0.x (1er lien) directement sous C :
3- dans le 2ème lien (fichiers de configuration), tu récupères les fichiers du dossier Configurations-release-2.0.7.2\config\examples\Alfawise\U20\
4- tu copies ces fichiers dans le dossier C:\Marlin 2.0.x\Marlin
5- dans VisualCode, tu cliques sur: file-> open folder et tu choisis le dossier C:\Marlin 2.0.x\
6- tu double-cliques sur le fichier Platformio.ini et tu modifies la ligne 21:
default_envs = STM32F103VE_longer
7- tu double-cliques sur le fichier Marlin\configuration.h, tu dé-commentes (enlève les "//" en début de ligne) les 3 lignes suivantes
525 //#define PID_EDIT_MENU // Add PID editing to the "Advanced Settings" menu. (~700 bytes of PROGMEM)
526 //#define PID_AUTOTUNE_MENU
1428 //#define LEVEL_CENTER_TOO
1757 #define LCD_LANGUAGE en DEVIENT #define LCD_LANGUAGE fr
tu ajoutes cette ligne 1797:
#define SDIO_SUPPORT // Note from Hobi : Added as was not present in the file...
8- tu double-cliques sur le fichier configuration_adv.h, tu dé-commentes la ligne 1345:
//#define SDCARD_CONNECTION LCD
la ligne 1577: #define TFT_BTARROWS_COLOR COLOR_WHITE devient #define TFT_BTARROWS_COLOR COLOR_YELLOW
(ça, c'est juste pour que ce soit moins terne )
)
tu dé-commentes les lignes 1613 //#define BABYSTEPPING
1615 //#define INTEGRATED_BABYSTEPPING
tu modifies les lignes suivantes:
1621 #define BABYSTEP_MULTIPLICATOR_Z 1 devient #define BABYSTEP_MULTIPLICATOR_Z 10
1622 #define BABYSTEP_MULTIPLICATOR_XY 1 devient #define BABYSTEP_MULTIPLICATOR_XY 10
9- Tu cliques sur Terminal->run Build task->platformio->build ça compile et si tout va bien, tu récupères le project.bin dans le dossier des sources C:\Marlin2.0.x\.pio\build\STM32F103VE_longer que tu copies sur la carte µSD.
10- Tu ajoutes un fichier vide que tu nommes Longer3D.UI (ou tu laisses celui qui est déjà sur ta carte µSD = celui que je t'ai fourni)
11- tu sais faire à partir de là...
Bon courage
-
Port
[TUTO] Installation SKR1.4 Turbo sur Alfawise U30_PROIl y a 15 heures, PLFmoto a dit :Cette ligne n'était pas activée :
Pour les cartes BTT SKR14 (et Turbo), il faut déclarer deux ports séries en fonction du matériel «connecté»:
- -1 USB
- 0 TFT
-
3 ESP01S (si le module «Wifi» est utilisé sur la carte (pas sur l'écran BTT TFT) ).
Donc pour toi, le premier en 0 et l'auxiliaire (le second) en -1.

-
Firmware exemple
[TUTO] Installation SKR1.4 Turbo sur Alfawise U30_PROSalut à tous, ça y est, elle est en vie !!! Ça fonctionne !!!
Un grand MERCI à tous ceux qui m'ont aidé dans cette aventure (ils se reconnaîtront)
Donc, comme promis voilà ma version du FW 2.0.5.3
Pour un plateau en 235x235, E3Dv6, extruder type origine, 3Dtouch branché en Pin Z-EndStop, Capteur de fin de filament, double Z et écran BTT TFT35 E3 V3.0 et TMC2209 Uart en spreadcycle. (je crois qu'il y a tout...
https://1drv.ms/u/s!Ah3C0nrtzlG7h0OupBSoZF7L7Yyb?e=r5IX9g
A+

-
[TUTO] Installation SKR1.4 Turbo sur Alfawise U30_PRO
[TUTO] Installation SKR1.4 Turbo sur Alfawise U30_PROPardonnes ma réponse si tardive j'avais la tête dans la machine
Je ne t'ai pas envoyé la bonne doc voici celle utilisée
Préparation:
1- Après avoir flashé Marlin, sur le terminal on commence pour plus de sécurité par un M502 (charger les réglages EEPROM d’origine) puis M500 (enregistrer réglages dans l’EEPROM) puis, si on est un peu maniaque comme moi un petit M501 (charger les données de l’EEPROM).
2- M851 pour vérifier que l’offset est bien à 0 de base (si c’est le cas: parfait sinon on fait M851 Z0 puis M500)
3- G28 puis G28 Z (homing des axes puis on se concentre sur le homing du Z)
4- G1 F60 Z0 (on demande à l’imprimante de descendre à ce qu’elle pense être le 0 de l’axe Z)
5- M211 S0 (on désactive le software endstop pour pouvoir régler notre offset du Z manuellement)
Réglage du Z Offset:
1- On place notre feuille à papier (ou autre cale de 0.10mm environ) sur le plateau et à l’aide de l’écran de l’imprimante (sur le Menu: Mouvement>Déplacer un axe> Déplacer Z) on descend la buse 1mm par 1mm puis 0.1mm par 0.1mm jusqu’à ce qu’on sente un frottement sur la feuille de papier (le papier ne soit pas être coincé mais pas non plus trop libre).
2- Maintenant, on retourne sur la page d’accueil depuis l’écran LCD et on note la valeur du Z affiché (juste en dessous de l’icône qui ressemble à un ventilo sur la droite)
3- On soustrait 0.1mm (l’épaisseur de la feuille ou de la cale) à cette valeur (exemple: si on a Z -2.4 on obtiendra -2.5 ) et on utilise cette valeur pour régler l’offset avec la commande M851 ZX.XX (dans mon exemple M851 Z-2.5)
4- On réactive le software endstop avec M211 S1 puis enregistre le tout avec M500 puis M501
5- On vérifie le Z-offset en envoyant G1 F60 Z0 (normalement on devrait se retrouver au « vrai » 0 du Z maintenant, c’est à dire l’épaisseur de votre cale entre la buse et le plateau)
Activation du nivellement avec le BL Touch:
1- On envoie un G28 (homing des axes)
2- On envoie G29 (on lance la palpation du plateau avec et on attend la fin de la procédure – qui se termine lorsque la buse ne bouge plus)
3- M420 S1 (on active le nivellement automatique avec les données que notre BL Touch vient de générer)
4- On sauvegarde avec M500 puis un petit M501 qui ne mange pas de pain et c’est fini!
Pour info j'ai tout recalibré mais en passant directement par Pronterface puis j'ai lancé une impression directement de CURA en USB. Pour l'instant cela imprime j'attends la fin d'impression pour voir la réaction.
En ce qui concerne la ligne commande //#define MIN_SOFTWARE_ENDSTOP_Z c'est bien ce que j'ai dans mon config H
Merci de l'info je vais donc supprimer cette commande dans dans la calibration du BLTouch.
Je te tiens informé de l'évolution et répondrais en direct à tes réponses car je reste devant l'ordi
Encore Merci
Ps: je suis indiscret mais tu roules avec quoi comme bécane? En ce qui me concerne 600 GSR
-
Moteur U20
Réglage Drivers électronique U20je suis tombé sur ça en cherchant complètement autre chose et je me suis souvenu de de ce poste, donc je vous partage ces info sur les moteur U20/U30:

-
Résolu : Ventilos sur SKR1.4 Turbo
Résolu : Ventilos sur SKR1.4 TurboFaut brancher ton ventilateur sur la sortie HE1 en respectant la polarité et mettre :
#define E0_AUTO_FAN_PIN P2_04
(tu confirmeras en regardant un schéma des pins de la 1.4)
-
Gcode demarrage
[Tutoriel] G-code idéal de début et fin d'impressionVoici mon G-code de démarrage pour mon U20+ avec BLtouch :
M117 Chauffe plateau... M140 S60 ;chauffe plateau-------------- M105 ;donné plateau M190 S60 ;attente chauffe plateau------ M117 Tests... G21 ;Valeurs métriques G90 ;Mode position absolue M107 ;Arret ventilateur M280 P0 S160 ;BL-Touch Alarm realease G4 P100 ;Delay for BL-Touch G28 ;home G92 E0 ;Reset extruder G29 ;Auto leveling M420 Z5 ;LEVELING_FADE_HEIGHT Real activation and set parameters (if not set here, Z-Compensation failed) M500 ;Write data carto G29 G0 Z50 Y22 X0 F1000 ;Lève & prépare M117 Chauffe buse... M104 S200 ;chauffe buse 200------------- M105 ;données buse M109 S200 ;attente buse 200------------- M82 ;absolute extrusion mode M106 S153 ;Ventilateur 60%-------------- G0 Z0.2 F1000 ;Descend G1 X200 E20 F1000 ;Imprime ligne aller G0 Z0.4 F1000 ;Lève G1 X100 E30 F1000 ;Imprime ligne retour G92 E0 ;Reset extruder G0 Z5 F1000 ;Lève M117 Impression...
merci à vous pour l'inspiration
-
Gcode demarrage
[Tutoriel] G-code idéal de début et fin d'impressionU20 Start GCode:
; -- START GCODE --
G21 ;set units to millimetres
G90 ;set to absolute positioning
M106 S0 ;set fan speed to zero (turned off)
M117 Bed Warming UP!
M140 S{material_bed_temperature_layer_0} ; Set Heat Bed temperature
M190 S{material_bed_temperature_layer_0} ; Wait for Heat Bed temperature
M117 Extruder Warming UP!
M104 S160 ; start warming extruder to 160
G28 ; Home all axes
M117 Get that mesh!
G29 ; Auto bed-level (BL-Touch)
M420 Z10 ; LEVELING_FADE_HEIGHT Real activation and set parameters
M500 ; save config
M501 ; config on
M117 Auto Level Done
G92 E0 ; Reset Extruder
M117 Finish war, Extruder!
M104 S{material_print_temperature_layer_0} ; Set Extruder temperature
M109 S{material_print_temperature_layer_0} ; Wait for Extruder temperature
G92 E0 ;zero the extruded length
G1 Z1 F1000 ;move up slightly
M117 Lets Purge the Nozzle
G1 Y60.0 Z0 E9.0 F1000.0 ;intro line
G1 Y100.0 E21.5 F1000.0 ;continue line
G92 E0 ;zero the extruded length again
; -- end of START GCODE --
-
Marlin Bugfix 2.0 + CM Creality 4.2.7 - Axe Z : valeur négative impossible
Marlin Bugfix 2.0 + CM Creality 4.2.7 - Axe Z : valeur négative impossiblePuisque tu utilises Pronterface, voici la liste des Gcodes à utiliser pour régler ton Zoffset :
CitationInstructions de réglage du décalage Z:
0. Préalable, mettre en chauffe le plateau (60° ( M190 S60 )) et éventuellement la buse (170° ( M109 S170 )) pour pouvoir enlever facilement les résidus de filament collés sur celle-ci
1. Effectuer la mise à l'origine des axes de l'imprimante via G28
2. M851 Z0 - Initialiser le décalage en Z à 0 (remise à 0 du Zoffset s'il y en avait un)
3. M500 - Stocker ce réglage en EEPROM
4. M501 - Récupérer les paramètres de l'EEPROM pour les rendre actifs
5. M503 - Afficher les paramètres en cours pour vérifier qu'ils ont bien été pris en compte
6. G28 Z - Mettre à l'origine l'axe Z
7. G1 F60 Z0 - Déplacer la buse au 0 Z
8. M211 S0 - Désactiver les contacteurs de fin de course (pour pouvoir descendre sous le 0)
9. Descendre doucement (pas de 0,01mm) l'axe Z jusqu'à frotter la feuille de papier (ou la cale utilisée), via l'écran de contrôle ou via d'abord un G91 puis une suite de G1 Z-0.1 F120 (ne surtout pas oublier le G91 avant la commande de déplacement)
10. Noter la valeur affichée de la position du Z sur l'écran du boitier (additionner cette valeur (sans tenir compte du signe négatif (autrement dit prendre la valeur absolue )) à l'épaisseur de la cale utilisée)
11. M851 ZX.XX (X.XX étant le décalage en Z calculé au point 10 (valeur négative))
12. M211 S1 - Réactiver les limites des contacteurs de fin de course
13. M500 - Sauvegarder ce réglage en EEPROM
14. M501 - Récupérer les paramètres de l'EEPROM pour les rendre actifs
15. M503 -Vérifier une dernière fois que tout a bien été pris en compte
-
Quelques éléments pour mieux comprendre la zone de palpage avec un ABL afin de paramétrer son Marlin
Quelques éléments pour mieux comprendre la zone de palpage avec un ABL afin de paramétrer son MarlinDe nombreuses questions se posent régulièrement sur ce point.
Ce sujet tente de faire le point sur la manière dont Marlin gère les emplacements du capteur de nivellement par rapport à la buse. Le type de capteur n'a pas d'importance, il peut s'agir d'un BLTouch (ou d’un clone / copie), d’un Touchmi, d'un capteur inductif, capacitif, …, tant que l’on est en mesure de déterminer le décalage de celui-ci par rapport à la buse (ceci ne s’applique pas aux capteurs où la buse elle-même fait office de sonde (piezo, pression, …)).
Pour débuter, on suppose que la buse ne peut qu’atteindre la totalité de la surface du lit d’impression, sans espace supplémentaire. Ainsi les limites du plateau utilisées sont celles définies dans le fichier «configuration.h» à la section [machine] :
// The size of the print bed #define X_BED_SIZE 200 #define Y_BED_SIZE 200 // Travel limits (mm) after homing, corresponding to endstop positions. #define X_MIN_POS 0 #define Y_MIN_POS 0 #define Z_MIN_POS 0 #define X_MAX_POS X_BED_SIZE #define Y_MAX_POS Y_BED_SIZE #define Z_MAX_POS 200
Cette hypothèse permet d'éviter que le chariot portant la tête ne se positionne à des emplacements pouvant provoquer des dommages au matériel. Cependant si des déplacements supplémentaires sont possibles, un décalage complémentaire pourra ensuite être ajouté aux limites (voir plus loin dans ce sujet).
En premier lieu, il faut déterminer le décalage du capteur par rapport à la buse:
- par mesures directes ou
-
en se fiant aux informations (quand / si elles sont fournies) du support du capteur
- via l'impression de celui-ci à partir d'un modèle récupéré sur un des nombreux sites de partage sur Internet (Thingiverse ou un autre)
- de la pièce métallique fournie dans un kit acheté «tout prêt»
Marlin
Les directives de compilation diffèrent en fonction de la version de Marlin
Pour la branche 2.0.x de Marlin, une seule directive définit la marge de «sécurité» utilisée par le capteur pour rester en dehors des bords du lit, par exemple pour éviter les pinces de maintien d’une vitre sur le plateau. Cette marge définit le décalage par rapport au bord du lit :
-
PROBING_MARGIN (configuration.h)
Cette valeur pourra ensuite être utilisée dans «configuration_adv.h», section [Probing Margins] :
#if PROBE_SELECTED && !IS_KINEMATIC //#define PROBING_MARGIN_LEFT PROBING_MARGIN //#define PROBING_MARGIN_RIGHT PROBING_MARGIN //#define PROBING_MARGIN_FRONT PROBING_MARGIN //#define PROBING_MARGIN_BACK PROBING_MARGIN #endifCes paramètres précisent les limites du palpage avec le G-code G29. C’est une portion du plateau d’impression car les capteurs / sondes ne sont généralement pas en mesure d'atteindre tous les points que la buse peut atteindre. Il faudra donc tenir compte des décalages XY de la sonde lors de la définition de ces limites.
Dans Marlin 1.1.x, la marge de «sécurité» était déclarée via la directive MIN_PROBE_EDGE
Les positions limites (positions absolues) que le capteur pouvait atteindre étaient déclarées ensuite, toujours dans «configuration.h», dans la section dépendant du mode de nivellement :
// Set the boundaries for probing (where the probe can reach). //#define LEFT_PROBE_BED_POSITION MIN_PROBE_EDGE //#define RIGHT_PROBE_BED_POSITION (X_BED_SIZE - MIN_PROBE_EDGE) //#define FRONT_PROBE_BED_POSITION MIN_PROBE_EDGE //#define BACK_PROBE_BED_POSITION (Y_BED_SIZE - MIN_PROBE_EDGE)
Décalages du capteur (offsets)
Dans la version actuelle de Marlin (au moment de l’écriture, la 2.0.9.1), les valeurs de décalage sont déclarées dans un tableau :
#define NOZZLE_TO_PROBE_OFFSET { XXX, YYY, ZZZ }
où XXX et YYY sont les décalages entiers (offset) du centre du capteur par rapport à la buse (vue de l'avant de la machine) :
-
Si les deux valeurs sont positives, le capteur est situé à l'arrière-droit,
-
si les deux sont négatives, la position est à l’avant-gauche ,
-
les autres positions possibles sont l'arrière-gauche et l'avant-droit (une valeur positive et une négative).
Marlin fournit un dessin en ASCII pour le rappeler :
* +-- BACK ---+ * | [+] | * L | 1 | R <-- Example "1" (right+, back+) * E | 2 | I <-- Example "2" ( left-, back+) * F |[-] N [+]| G <-- Nozzle * T | 3 | H <-- Example "3" (right+, front-) * | 4 | T <-- Example "4" ( left-, front-) * | [-] | * O-- FRONT --+Pour rappel avec un Marlin 1.1.9.1, la position du capteur était définie à l'aide des constantes suivantes :
#define X_PROBE_OFFSET_FROM_EXTRUDER [XXX] // X offset: -left +right [of the nozzle] #define Y_PROBE_OFFSET_FROM_EXTRUDER [YYY] // Y offset: -front +behind [the nozzle]Limites de la zone du capteur
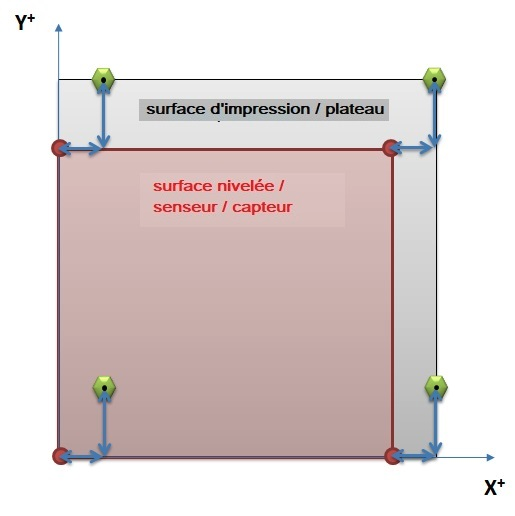
Dans les dessins suivants, la buse, le capteur et les décalages sont définis par :
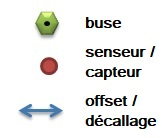
Quatre positions sont possibles pour le capteur (une cinquième existe pour la buse faisant office de capteur, dans ce cas il n’y a plus de décalage puisque palpeur et buse sont à la même position
), ce qui donne les schémas suivants pour les limites de la zone du capteur (zone rouge transparente) :
1. Capteur à l'arrière-droit :
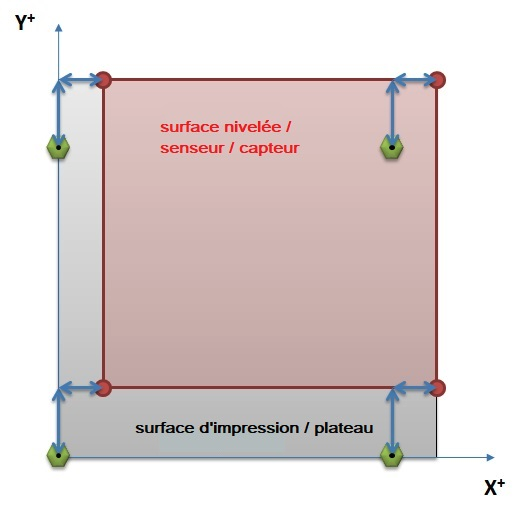
Le capteur peut atteindre les bordures arrière et droite, les limites sont donc fixées par :
Marlin 1.x :
#define LEFT_PROBE_BED_POSITION (X_PROBE_OFFSET_FROM_EXTRUDER) #define RIGHT_PROBE_BED_POSITION (X_BED_SIZE) #define FRONT_PROBE_BED_POSITION (Y_PROBE_OFFSET_FROM_EXTRUDER) #define BACK_PROBE_BED_POSITION (Y_BED_SIZE)
Marlin 2.x :
Pas besoin de déclarer les positions gauche, droite, avant, arrière explicitement car avec cette version de Marlin la calcul est automatique à partir de la déclaration NOZZLE_TO_PROBE_OFFSET
Si un décalage de «sécurité» a été défini par :
-
#define MIN_PROBE_EDGE [valeur] (Marlin 1.x) ou
-
#define PROBING_MARGIN [valeur] (Marlin 2.x)
dans le fichier «configuration.h», les limites de palpage seront modifiées automatiquement pour en tenir compte (Marlin 2.x), ce qui donnera la zone en rouge foncé pour la surface palpée (t = MIN_PROBE_EDGE / PROBING_MARGIN) :
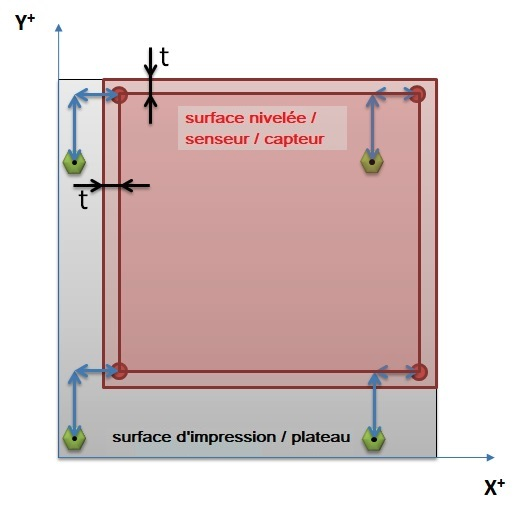
Pour un Marlin 1.x, les limites deviennent :
#define LEFT_PROBE_BED_POSITION (X_PROBE_OFFSET_FROM_EXTRUDER + MIN_PROBE_EDGE) #define RIGHT_PROBE_BED_POSITION (X_BED_SIZE - MIN_PROBE_EDGE) #define FRONT_PROBE_BED_POSITION (Y_PROBE_OFFSET_FROM_EXTRUDER + MIN_PROBE_EDGE) #define BACK_PROBE_BED_POSITION (Y_BED_SIZE - MIN_PROBE_EDGE)2. Capteur à l'arrière-gauche :
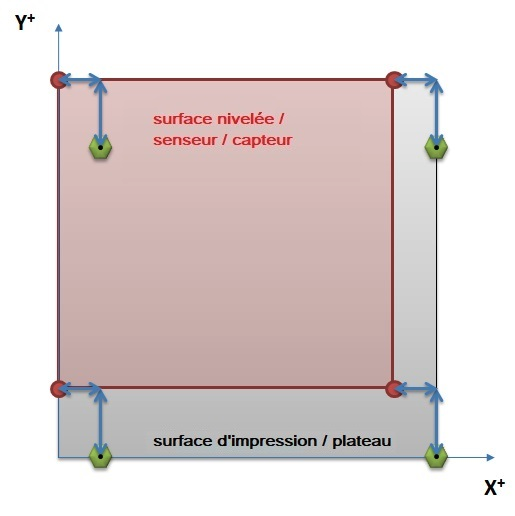
Le capteur peut atteindre les bords arrière et gauche, les limites sont donc fixées par (Marlin 1.x) :
#define LEFT_PROBE_BED_POSITION (MIN_PROBE_EDGE) #define RIGHT_PROBE_BED_POSITION (X_BED_SIZE + X_PROBE_OFFSET_FROM_EXTRUDER - MIN_PROBE_EDGE) #define FRONT_PROBE_BED_POSITION (Y_PROBE_OFFSET_FROM_EXTRUDER + MIN_PROBE_EDGE) #define BACK_PROBE_BED_POSITION (Y_BED_SIZE - MIN_PROBE_EDGE)3. Capteur à l'avant-gauche :
Le capteur peut atteindre les bords avant et gauche, les limites sont donc fixées par (Marlin 1.x) :
#define LEFT_PROBE_BED_POSITION (MIN_PROBE_EDGE) #define RIGHT_PROBE_BED_POSITION (X_BED_SIZE + X_PROBE_OFFSET_FROM_EXTRUDER - MIN_PROBE_EDGE)) #define FRONT_PROBE_BED_POSITION (MIN_PROBE_EDGE) #define BACK_PROBE_BED_POSITION (Y_BED_SIZE + Y_PROBE_OFFSET_FROM_EXTRUDER - MIN_PROBE_EDGE)4. Capteur à l'avant-droit :
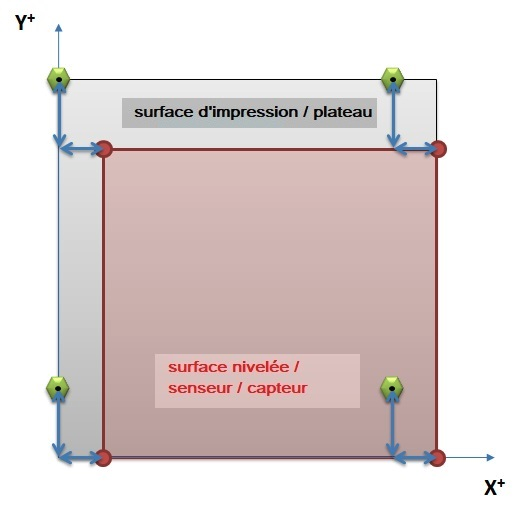
Le capteur peut atteindre les bords avant et droit, les limites sont donc fixées par (Marlin 1.x) :
#define LEFT_PROBE_BED_POSITION (X_PROBE_OFFSET_FROM_EXTRUDER + MIN_PROBE_EDGE) #define RIGHT_PROBE_BED_POSITION (X_BED_SIZE - MIN_PROBE_EDGE) #define FRONT_PROBE_BED_POSITION (MIN_PROBE_EDGE) #define BACK_PROBE_BED_POSITION (Y_BED_SIZE + Y_PROBE_OFFSET_FROM_EXTRUDER - MIN_PROBE_EDGE)Les bases de la définition des limites physiques de la zone du capteur ont été passées en revue.
CAS OÙ LA BUSE PEUT SE DÉPLACER EN DEHORS DES LIMITES DU PLATEAU
Cela devient légèrement plus compliqué lorsqu'il y a un espace de déplacement supplémentaire.
L'espace de déplacement supplémentaire peut être déclaré dans le fichier de configuration :
// Travel limits (mm) after homing, corresponding to endstop positions. #define X_MIN_POS [XX] #define Y_MIN_POS [YY]où [XX] et [YY] sont les valeurs de décalage entre le contacteur de fin de course (endstop) et l'origine (les flèches orange représentent X_MIN_POS et Y_MIN_POS (homing offset)) :
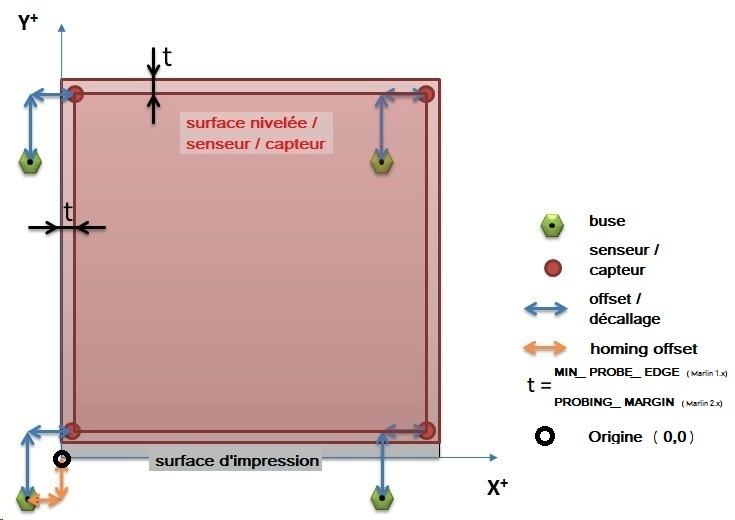
Résultats des constantes de décalage pour une sonde à l’arrière-droit, exemple pour un Marlin 1.x :
#define LEFT_PROBE_BED_POSITION (X_PROBE_OFFSET_FROM_EXTRUDER + X_MIN_POS + MIN_PROBE_EDGE) #define RIGHT_PROBE_BED_POSITION (X_BED_SIZE - MIN_PROBE_EDGE) #define FRONT_PROBE_BED_POSITION (Y_PROBE_OFFSET_FROM_EXTRUDER + Y_MIN_POS + MIN_PROBE_EDGE) #define BACK_PROBE_BED_POSITION (Y_BED_SIZE - MIN_PROBE_EDGE)Idem si la tête d'impression est capable de se déplacer plus loin sur l'axe X ou Y aux autres extrémités des axes, on pourra «augmenter» la taille maximale du plateau.
Exemple avec une buse pouvant se déplacer de 20mm à droite et en arrière du plateau :
#define X_MAX_POS X_BED_SIZE + 20 #define Y_MAX_POS Y_BED_SIZE + 20Particularité de Marlin 2.0.x
Par analogie avec les graphiques précédents, on peut dessiner les limites du lit (l'exemple ci-dessous suppose une sonde montée à l'arrière et à droite)
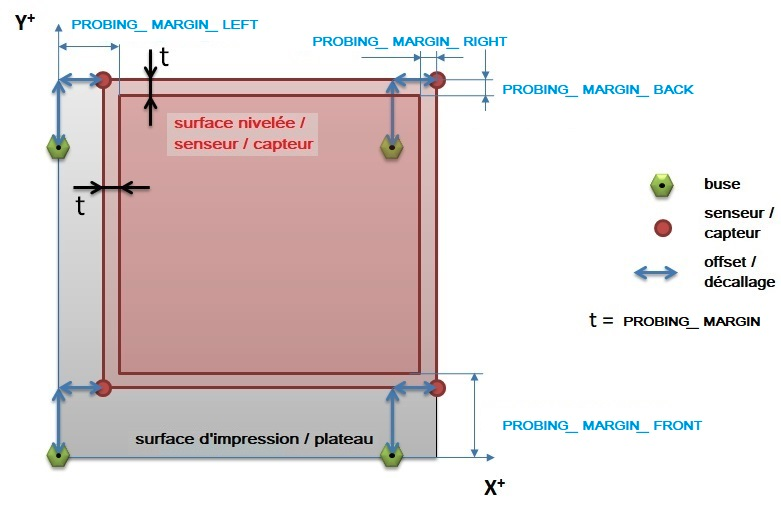
Les décalages du capteur par rapport à la buse ayant été définis dans le fichier configuration.h, via :
#define NOZZLE_TO_PROBE_OFFSET { XXX, YYY, ZZZ }Marlin 2.0.x ajustera automatiquement la surface de palpage de la sonde en fonction des décalages (offsets) précédents et du PROBING_MARGIN défini pour les 4 côtés du lit.
Dans le dessin ci-dessus, le «PROBING_MARGIN_LEFT» ajoute le décalage X à la marge de «sécurité» automatiquement, idem pour le «PROBING_MARGIN_FRONT», pas besoin de faire le calcul

Si l’on voulait utiliser des valeurs absolues au lieu du calcul automatique de Marlin, il faudrait alors les déclarer explicitement en remplaçant la variable «PROBING_MARGIN» par des valeurs entières puis décommenter la ligne pour qu’elle soit prise en compte lors de la compilation.
Exemple :
#if PROBE_SELECTED && !IS_KINEMATIC #define PROBING_MARGIN_LEFT 15 //#define PROBING_MARGIN_RIGHT PROBING_MARGIN #define PROBING_MARGIN_FRONT 25 //#define PROBING_MARGIN_BACK PROBING_MARGIN #endifC’est en tout cas ainsi que j’ai compris la manière dont Marlin gère l’espace de travail d’un capteur ABL (Auto Bed Leveling). J’ai peut-être compris de travers, si c’est le cas, n’hésitez pas à me le signaler.
-
Problème avec U20 et SKR3 sous Marlin
Problème avec U20 et SKR3 sous Marlinil y a 24 minutes, Tony007 a dit :je ne sais pas comment déclaré les TMC2209 afin d'utiliser la communication UART
1- il suffit de remplacer TMC2209_STANDALONE par TMC2209 + placer un cavalier sous chaque pilote dans la position indiquée au point 3.2.2 de la doc de la carte (ligne 3, colonne de gauche et centrale): BIGTREETECH SKR 3 user manual.pdf
2- la subdivision des pas sera donc spécifiée ici:
#define X_MICROSTEPS 16, #define Y_MICROSTEPS 16,...
Si tu pars sur 16, il faudra penser à x2 les pas/mm actuels.
Les valeurs des courants peuvent être laissé ( #define X_CURRENT 800, ... )
il y a 24 minutes, Tony007 a dit :c'est la dimension du bed le home n'est pas centré
4- normal puisque la taille de ton plateau n'était pas correct. Dans le doute, je laisserais l'origine à 0:
#define X_MIN_POS 0
#define Y_MIN_POS 0Au pire, tu corrigeras plus tard avec un M206.
EDIT:
il y a 25 minutes, Tony007 a dit :je dois décommenter //#define EEPROM_INIT_NOW // Init EEPROM on first boot after a new build. pour ne pas faire la manip a chaque fois ?
Si tu veux. Il faut juste avoir conscience que ça initialise les paramètres spécifiques de ton imprimante (pas/mm, PIDs,...). Il faut donc penser à noter ces valeurs afin de les renseigner après flashage, à moins que tu ne les saisisses dans le firmware.
il y a 24 minutes, Tony007 a dit :c'est le bed qui chauffe jusqu'à 50 et après j'ai une alerte "printer halted. Kill called !"
tu m'étonnes
 , avec tes valeurs de PID du lit chauffant, c'est clair que ça doit affoler les sécurités
, avec tes valeurs de PID du lit chauffant, c'est clair que ça doit affoler les sécurités  . Aller, 1 p'tit réglage de PID, et ce sera nickel:
. Aller, 1 p'tit réglage de PID, et ce sera nickel:
-
soit tu le fais dans le menu "auto-tune lit" (un truc dans le genre
 ) qui apparait dans le mode Marlin si tu décommentes: //#define PID_AUTOTUNE_MENU
) qui apparait dans le mode Marlin si tu décommentes: //#define PID_AUTOTUNE_MENU
- soit en envoyant des Gcodes:
Pour le plateau chauffant:
M303 E-1 S70 C8
en retour:
RECU: p:841.68 i:152.12 d:1164.25
tu envoies la commande avec tes propres valeurs:
M304 P841.68 I152.12 D1164.25
Tu sauvegardes et tu lis les valeurs de l'eeprom:
M500
M501En passant, tu pourras le faire pour la buse:
Pour la buse:
M303 E0 S210 C8
en retour, tu devrais avoir quelque chose comme ça (les valeurs seront différentes):
RECU: p:17.22 i:1.00 d:74.22
tu n'as plus qu'à envoyer la commande avec tes propres valeurs:
tete: M301 P17.22 I1.00 D74.22M500
M501
-
soit tu le fais dans le menu "auto-tune lit" (un truc dans le genre
-
carte mère 4.2.2 vs 4.2.7 Apports et différences
carte mère 4.2.2 vs 4.2.7 Apports et différencesoui, si tu as pensé à modifier le Gcode de démarrage dans le trancheur. Pour mémoire: Pour appliquer la correction, il faudra modifier le GCode de démarrage dans le logiciel de tranchage (CURA,...). Tu as 2 solutions:
1- palper ton plateau à chaque début d'impression (long et probablement inutile): après le G28 de ton GCode de démarrage tu tapes G29
2- tu palpes ton plateau et tu enregistres le résultat (préférable et à refaire en cas de nivellement suspect): avant d'imprimer, tu envoies: G28 puis G29. Tu sauvegardes le nivellement avec la commande M500. Ces opérations peuvent également se faire en imprimant ce fichier SauveMatrice.gcode . Dans le Gcode de démarrage, après la ligne G28, tu tapes M420 S1. Si tu veux que le nivellement s'estompe à jusqu'à 2mm de haut, tu tapes M420 S1 Z2
-
Problème avec U20 et SKR3 sous Marlin
Problème avec U20 et SKR3 sous MarlinSalut,
Il y a 2 heures, Tony007 a dit :lorsque je scanne le bed avec le BlTouch il vient en butée en X à droite
Comme ton BLtouch est très décalé par rapport à ta buse (-55 en X), il faudrait augmenter ce paramètre dans le fichier configuration.h:
#define PROBING_MARGIN 50
Il y a 2 heures, Tony007 a dit :Une autre chose, est-ce qu'il faut modifier le G-code de démarrage pour activer le BlTouch ?
oui, voir ce message