AlphAndruino
-
Compteur de contenus
147 -
Inscrit(e) le
-
Dernière visite
Tout ce qui a été posté par AlphAndruino
-
Je confirme que ca venait bien de là. J'ai installé mon Yumi Pad mais j'ai débranché l'écran avant et aucun soucis sur une impression de 18h. Aucun bytes_retransmited dans le log
-
En même temps, je me demande.... Pour pouvoir reclasser Marlin avec xloader, j'ai été obligé de désactiver la connexion serie de l'écran, c'est une option sur mon firmware écran modifié. Si j'ai été obligé de le faire pour xloadet. Je me demande si il ne fallait pas que je le fasse pour klipper, pour l'utiliser....
-
Et d'ailleurs il est réinstallé, plein le dos de Klipper
-
Merci mais pas besoin j'ai un firmware custopm : Molise
-
Je suis en train de me reconfigurer un Marlin
-
Bon, bonne, ou mauvaise, nouvelle, mais ce n'est pas non plus un problème de vitesse d'impression. J'ai descendu les viteses à 50mm/s et ça vient de se planter, tout pareil. Je désepsère
-
Oui, c'est ça, elle attends les 200 voire un tout petit peu plus sur les grandes lignes. Sinon, elle tiens bien les 150, par exemple sur le remplissage
-
Entre 100 et 200 mm/s
-
ok, merci de l'info Quand aux vitesses d'impression?
-
Hum, c'est bien ce que je craignais, je l'ai comparé au log de l'impression d'un benchy qui, lui, fonctionne bien et les graphs ont la même tronche. Mais quand même le bandwidth m'interpelle, il est très grand et vachement variable. Peut-être une autre piste, mais l'alim de l'imprimante et le rapsberry sont sur la même multiprise, celà pourrait-il être une cause d'interférence, sachant que l'imprimant est sur une prise connectée. En fait, mes problèmes de mcu timeout se posent quand je tente d'imprimer des fichier plus gros, genre une boite et son couvercle (2 essai, le premier mcu timeout, le second ok) et là, c'est la tête de Dark Vador que j'imprime taille réelle, ou presque, qui elle fail à chaque tentative. Des benchy ou des cubes de calibration, je n'ai aucun souci mais des plateaux complets ou de grosses pièces, crash. La vitesse d'impression pourrait-elle avoir un impacte sur la communication entre le host et le mcu ou avec la surface d'impression (sous entendu la dimension de ce qu'il y a à imprimer) Si j'imprime moins vite, ça pourrait marcher, en gros, sur une grosse pièce?
-
Salut Pour infos, j'ai changé de câle usb, pour être sûr d'en avoir un rapide et blindé et je lui ai ajouté un tore de ferrite, question de... J'ai bien cru que c'était bon, mais pas de bol, plantage à 13% de l'impression après presque 5h de print...Bouhhhh. En continuant de creuser, se suis tombé su ce site : https://sineos.github.io/ C'est cool, mais je ne comprend pas trop ce que je vois. Je joint mon le fichier log de mon dernier crash, si un sachant au grand coeur traine dans le coin. Je devrais recevoir mon Yumi pad cette semaine. klippy 2024-12-05.zip
-
ah, ok, mais du coup, ce n'est pas mon cas, mais merci du tuyau
-
Non, je n'ai qu'un rapsberry, je verrais ça quand j'aurais reçu mon klipper pas. Mais quel rapport?
-
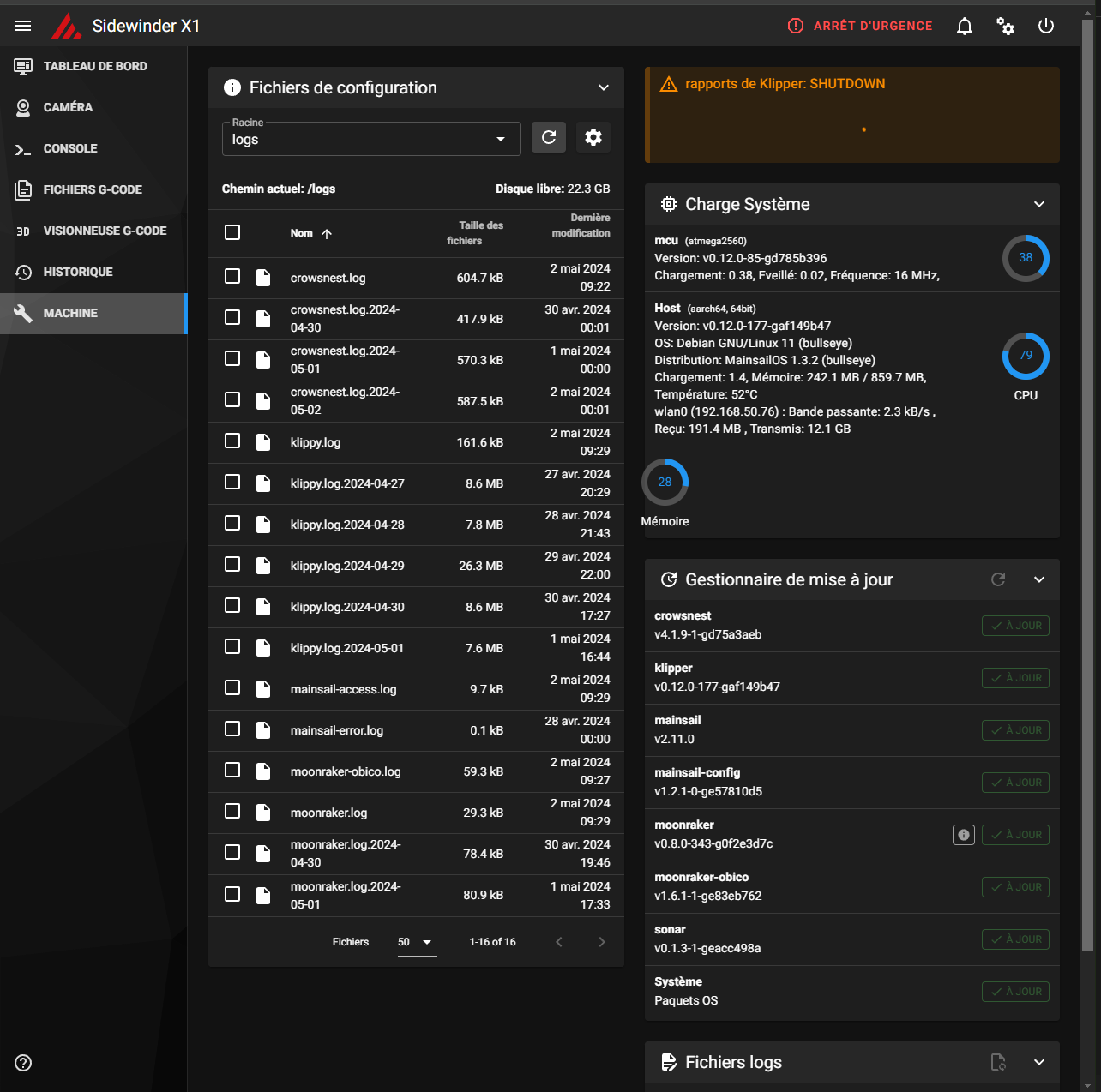
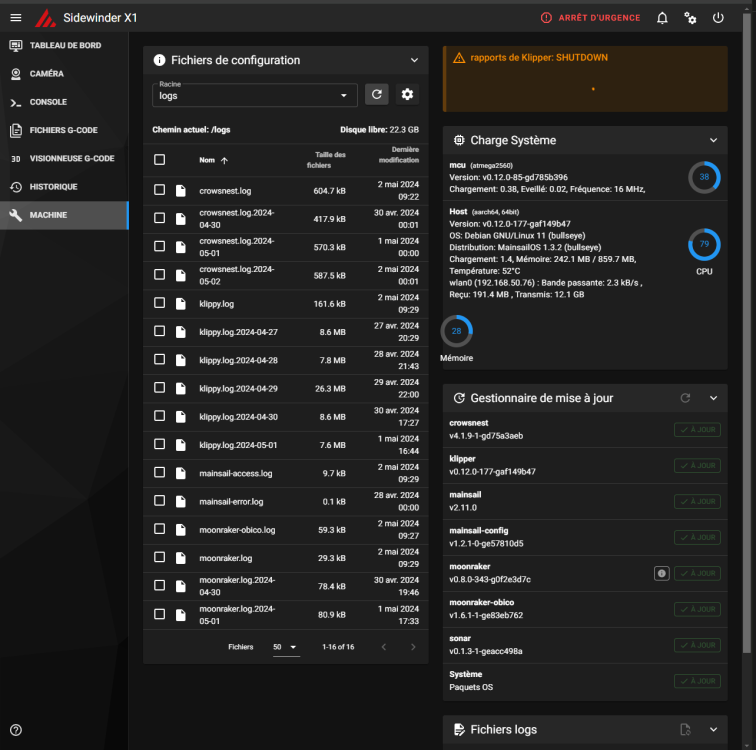
Nouveau crash Je désespère. Je joint klippy.log et Moonraker.log, au cas où.... Ainsi qu'une capture d'écran des infos machines juste après le crash. A noter que je dois faire un redémarrage du firmware pour que Klipper se reconnecte Par contre, bonne nouvelle, je devrais recevoir mon Yumi pad dans pas longtemps. Je ne sais pas si ça aidera, mais bon. Klippy.txt Moonraker.txt
-
Si c'est ça, c'est la merde , je suis loin d'être assez balèze en linux pour débuggeur ce genre de problème. Je viens de relancer mon impression qui a merdée 3 fois de suite en partant d'un klippy.log vierge pour voir si j'ai plus d'info et je suis la charge processeur pour voir si ça ne viendrait pas d'uun ouverload ou vitesse d'impression triop importante, j'ai aussi changé le câble usb, et le port sur le rapsberry, mais je n'ai que des vieux câbles. Enfin, croisons les doigts
-
Oui, à ce niveau tout était bon, pas d'arrêt d'urgence non plus. Pour le moment, jincriminerais le câble usb pas assez rapide ou de mauvaise qualité
-
Hello Mes impressions, pas toutes, mais certaines, s'arrête sans préavis. Si je regarde les logs Klipper, j'ai ce message d'erreur : Timeout with MCU 'mcu' (eventtime=323718.695482) Transition to shutdown state: Lost communication with MCU 'mcu' Je ne peux pas redémarrer Klipper, je dois éteindre et rallumer l'imprimante. J'ai trouvé une info comme quoi celà pouvait être du à ModemManager.service, je l'ai donc désactivé, mais ça ne change rien. So far, j'ai quand même réussi à imprimer ce que je voulais au bout de la seconde tentative en relançant le fichier (même gcode) mais là, sur ce que je veux imprimer, ç fait la troisième fois que ça m'arrive. Et c'est quoi la 'mcu' le Rapsberry ou l'imprimante?
-
Problème BL Touch et Klipper lors du home Z
AlphAndruino en réponse au topic de AlphAndruino dans Artillery
OK, j'avais joué sur ce paramètre mais je ne l'avais pas compris Oui, 5mm de diamètre -
Salut, Ca y est, j'ai passé le cap, j'ai fait mon installation hier. Pas de problèmes particuliers hormis avec le bl-touch. Lors du home du Z, la tête se positionne au milieu de l'axe X et fait son home, alors qu'elle devrait positionner le bl-ltouch au centre du plateau conformément à l'offset, j'ai essayé plusieurs valeurs d'offset de la sonde mais rien ne change, j'aurais loupé un truc? Et bien sûr, impossible de faire un bed levelling, j'ai une erreur Move out of range quand la tête arrive à droite Voici mon fichier printer.cfg : [include mainsail.cfg] [stepper_x] step_pin: ar54 dir_pin: ar55 enable_pin: !ar38 microsteps: 16 rotation_distance: 40 endstop_pin: ^!ar3 position_endstop: 0 position_max: 310 homing_speed: 60.0 [stepper_y] step_pin: ar60 dir_pin: ar61 enable_pin: !ar56 microsteps: 16 rotation_distance: 40 endstop_pin: ^!ar14 position_endstop: 0 position_max: 310 homing_speed: 60 homing_positive_dir: false [stepper_z] step_pin: ar46 dir_pin: !ar48 enable_pin: !ar62 microsteps: 16 rotation_distance: 8 endstop_pin: probe:z_virtual_endstop position_min: -3 position_max: 400 homing_speed: 30 second_homing_speed: 1 [stepper_z1] step_pin: ar36 dir_pin: !ar34 enable_pin: !ar30 microsteps: 16 rotation_distance: 8 [extruder] step_pin: ar26 dir_pin: ar28 enable_pin: !ar24 microsteps: 16 rotation_distance: 7 nozzle_diameter: 0.400 filament_diameter: 1.750 heater_pin: ar10 sensor_type: EPCOS 100K B57560G104F sensor_pin: analog13 min_extrude_temp: 190 min_temp: 5 max_temp: 300 max_extrude_only_distance: 500 max_extrude_cross_section: 2.0 [heater_bed] heater_pin: ar8 sensor_type: EPCOS 100K B57560G104F sensor_pin: analog14 min_temp: 5 max_temp: 150 [fan] pin: ar9 kick_start_time: 0.500 [heater_fan my_nozzle_fan] pin:ar7 heater: extruder heater_temp: 50.0 fan_speed: 1.0 [mcu] #make sure this reflects your serial port you found when flashing klipper serial: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 [printer] kinematics: cartesian max_velocity: 200 max_accel: 3000 max_z_velocity: 50 max_z_accel: 100 square_corner_velocity: 5 [bltouch] sensor_pin: ^ar18 control_pin: ar11 x_offset:-49 y_offset:-25 speed:10 samples:3 samples_result:average set_output_mode: 5V probe_with_touch_mode: true stow_on_each_sample: false [safe_z_home] home_xy_position: 122,183 speed: 100 z_hop: 20 z_hop_speed: 20 [bed_mesh] speed: 800 mesh_min: 30,30 mesh_max: 270,270 probe_count: 5,5 mesh_pps: 2,2 algorithm: bicubic bicubic_tension: 0.2 move_check_distance: 3.0 split_delta_z: .010 fade_start: 1.0 fade_end: 5.0 [bed_screws] screw1: 55,55 screw1_name: front left screw2: 255,55 screw2_name: front right screw3: 255,255 screw3_name: back right screw4: 55,255 screw4_name: back left speed: 100.0 [screws_tilt_adjust] screw1: 22,83 screw1_name: front left screw2: 222,83 screw2_name: front right screw3: 22,283 screw3_name: back left screw4: 222,283 screw4_name: back right speed: 100.0 screw_thread: CW-M5 #uncomment the following lines to use Z_TILT_ADJUST and uncomment G34 Macro to use G34 #[z_tilt] #z_positions: # 10,155 # 270,155 # #points: # 10,155 # 270,155 #speed: 100 #horizontal_move_z: 10 [gcode_macro G29] gcode: BED_MESH_CLEAR G28 BED_MESH_CALIBRATE BED_MESH_PROFILE SAVE=x1 #[gcode_macro G34] #gcode: # G28 # Z_TILT_ADJUST [gcode_macro G35] gcode: G28 SCREWS_TILT_CALCULATE [gcode_macro START_PRINT] # Reference https://github.com/KevinOConnor/klipper/blob/master/docs/Config_Reference.md#gcode_macroA # On how to override default parameters #default_parameter_BED_TEMP: 60 #default_parameter_EXTRUDER_TEMP: 200 gcode: # Home the printer G28 #Probe Everytime G29 #load saved mesh at print start instead of probe. Uncomment to use but comment out G29 #BED_MESH_PROFILE LOAD=x1 # Use absolute coordinates G90 # Move the nozzle near the bed G1 X0 Y0 Z5 F3000 # Move the nozzle very close to the bed G1 Z0.15 F300 G92 E0 ;Reset Extruder G1 X20 Y5 Z0.3 F5000.0 G1 Z0.3 F1000 G1 X200 Y5 F1500.0 E15 G1 X200 Y5.3 Z0.3 F5000.0 G1 X5.3 Y5.3 Z0.3 F1500.0 E30 G1 Z3 F3000 G21 ; set units to millimeters G90 ; use absolute coordinates M83 ; use relative distances for extrusion G92 E0 [gcode_macro END_PRINT] gcode: # Turn off bed, extruder, and fan M140 S0 M104 S0 M106 S0 # Move nozzle away from print while retracting G91 G1 X-2 Y-2 E-3 F300 # Raise nozzle by 10mm G1 Z30 F3000 G90 # Disable steppers M84 [pause_resume] recover_velocity: 50. #[filament_switch_sensor my_sensor] #Move filament runout sensor from TFT to X+ endstop pin. Uncomment all but this line if you want to use this #pause_on_runout: False #runout_gcode: PAUSE #insert_gcode: RESUME #switch_pin: ar2 # Arduino aliases for atmega2560/1280 (Arduino mega) boards [board_pins arduino-mega] aliases: ar0=PE0, ar1=PE1, ar2=PE4, ar3=PE5, ar4=PG5, ar5=PE3, ar6=PH3, ar7=PH4, ar8=PH5, ar9=PH6, ar10=PB4, ar11=PB5, ar12=PB6, ar13=PB7, ar14=PJ1, ar15=PJ0, ar16=PH1, ar17=PH0, ar18=PD3, ar19=PD2, ar20=PD1, ar21=PD0, ar22=PA0, ar23=PA1, ar24=PA2, ar25=PA3, ar26=PA4, ar27=PA5, ar28=PA6, ar29=PA7, ar30=PC7, ar31=PC6, ar32=PC5, ar33=PC4, ar34=PC3, ar35=PC2, ar36=PC1, ar37=PC0, ar38=PD7, ar39=PG2, ar40=PG1, ar41=PG0, ar42=PL7, ar43=PL6, ar44=PL5, ar45=PL4, ar46=PL3, ar47=PL2, ar48=PL1, ar49=PL0, ar50=PB3, ar51=PB2, ar52=PB1, ar53=PB0, ar54=PF0, ar55=PF1, ar56=PF2, ar57=PF3, ar58=PF4, ar59=PF5, ar60=PF6, ar61=PF7, ar62=PK0, ar63=PK1, ar64=PK2, ar65=PK3, ar66=PK4, ar67=PK5, ar68=PK6, ar69=PK7, analog0=PF0, analog1=PF1, analog2=PF2, analog3=PF3, analog4=PF4, analog5=PF5, analog6=PF6, analog7=PF7, analog8=PK0, analog9=PK1, analog10=PK2, analog11=PK3, analog12=PK4, analog13=PK5, analog14=PK6, analog15=PK7, # Marlin adds these additional aliases ml70=PG4, ml71=PG3, ml72=PJ2, ml73=PJ3, ml74=PJ7, ml75=PJ4, ml76=PJ5, ml77=PJ6, ml78=PE2, ml79=PE6, ml80=PE7, ml81=PD4, ml82=PD5, ml83=PD6, ml84=PH2, ml85=PH7 #*# <---------------------- SAVE_CONFIG ----------------------> #*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated. #*# #*# [extruder] #*# control = pid #*# pid_kp = 21.465 #*# pid_ki = 0.980 #*# pid_kd = 117.521 #*# #*# [heater_bed] #*# control = pid #*# pid_kp = 48.362 #*# pid_ki = 0.638 #*# pid_kd = 915.854 #*# #*# [bltouch] #*# z_offset = 2.045 #*# #*# [bed_mesh default] #*# version = 1 #*# points = #*# 0.000000, 0.032500, 0.040000, 0.105000, 0.195000 #*# -0.037500, -0.045000, -0.005000, 0.045000, 0.112500 #*# -0.002500, -0.015000, 0.005000, 0.062500, 0.145000 #*# 0.115000, 0.077500, 0.055000, 0.080000, 0.080000 #*# 0.072500, 0.035000, 0.020000, 0.015000, 0.055000 #*# x_count = 5 #*# y_count = 5 #*# mesh_x_pps = 2 #*# mesh_y_pps = 2 #*# algo = bicubic #*# tension = 0.2 #*# min_x = 30.0 #*# max_x = 270.0 #*# min_y = 30.0000000001 #*# max_y = 270.0 #*# #*# [bed_mesh x1] #*# version = 1 #*# points = #*# 0.000000, 0.032500, 0.040000, 0.105000, 0.195000 #*# -0.037500, -0.045000, -0.005000, 0.045000, 0.112500 #*# -0.002500, -0.015000, 0.005000, 0.062500, 0.145000 #*# 0.115000, 0.077500, 0.055000, 0.080000, 0.080000 #*# 0.072500, 0.035000, 0.020000, 0.015000, 0.055000 #*# x_count = 5 #*# y_count = 5 #*# mesh_x_pps = 2 #*# mesh_y_pps = 2 #*# algo = bicubic #*# tension = 0.2 #*# min_x = 30.0 #*# max_x = 270.0 #*# min_y = 30.0000000001 #*# max_y = 270.0 Voici le log d'un G29 09:08 Move out of range: 319.000 55.000 5.000 [0.000] 09:08 Move out of range: 319.000 55.000 5.000 [0.000] 09:08 probe at 259.000,55.000 is z=1.342500 09:08 probe at 259.000,55.000 is z=1.340000 09:08 probe at 259.000,55.000 is z=1.340000 09:08 probe at 199.000,55.000 is z=1.580000 09:08 probe at 199.000,55.000 is z=1.577500 09:08 probe at 199.000,55.000 is z=1.577500 09:08 probe at 139.000,55.000 is z=1.717500 09:08 probe at 139.000,55.000 is z=1.720000 09:08 probe at 139.000,55.000 is z=1.715000 09:08 probe at 79.000,55.000 is z=1.875000 09:08 probe at 79.000,55.000 is z=1.872500 09:08 probe at 79.000,55.000 is z=1.855000 09:08 G29
-
Préparation pour migration sous Klipper d'une Sidewinder X1 PArt 2
AlphAndruino en réponse au topic de AlphAndruino dans Artillery
OK, merci beaucoup -
Préparation pour migration sous Klipper d'une Sidewinder X1 PArt 2
AlphAndruino en réponse au topic de AlphAndruino dans Artillery
OK, du coup, si je comprend bien, D4 = ^AR4? Si je regarde les allias pour un Arduino Mega, qui est dans le printer.cfg de Clanks et qui est le même que dans le github de Klipper il y a PG5 comme correspondance et je ne vois pas de D4 dans les définitions d'alias. Et les ^ et ! que je vois devant certains pin ça correspond à quoi? Des états genre ouvert/fermé? et il y a aussi des combinaison ^! ? Je viens de trouver ça ; https://github.com/makerbase-mks/Klipper-for-MKS-Boards/blob/main/MKS Gen l/README.md C'est bon comme ref? -
Préparation pour migration sous Klipper d'une Sidewinder X1 PArt 2
AlphAndruino a posté un sujet dans Artillery
Salut, Suite à mon premier post, cette fois ci, je me pose la question du capteur de filament. Utilisant Octoprint, j'avais fait la manip de ce pdf pour que la fin de filament soit détectée par octoprint : https://www.lesimprimantes3d.fr/forum/applications/core/interface/file/attachment.php?id=109475 C'est branché à l'emplacement "D4". Du coup ça correspond à quoi comme pin pour Klipper? Question subsidiaire, où puis-je trouvé les correspondance de la carte MKS Gen L avec les définition de pin Klipper? -
Préparation pour migration sous Klipper d'une Sidewinder X1
AlphAndruino en réponse au topic de AlphAndruino dans Artillery
Poupidou!!! Bien vue l'aveugle. J'était totalement passé à côté de ces 2 infos. OK, du coup je capte mieux, et celui de Clanks me correspond puisque mon imprimante est stock à part le BL-Touch. Merci beaucoup -
Préparation pour migration sous Klipper d'une Sidewinder X1
AlphAndruino a posté un sujet dans Artillery
Bonjour, Comme indiqué dans le titre, je me prépare sérieusement à migrer. Du coup, je commence à regarder la doc Klipper et à chercher des fichiers printer.cfg. J'en ai trouvé 2, un ici : https://github.com/Clank50AE/Clanks-Klipper-Configs/blob/master/SideWinder X1 BLTouch.cfg et l'autre là : https://gist.github.com/GarthSnyder/082bd165a36c95a1d29cb714254bcc12 Le souci c'est que déjà la configuration de base des steppers est différente, pour le premier : [stepper_x] step_pin: ar54 dir_pin: ar55 enable_pin: !ar38 microsteps: 16 rotation_distance: 40 endstop_pin: ^!ar3 position_endstop: 0 position_max: 310 homing_speed: 40.0 et pour le second : [stepper_x] step_pin: P2.2 dir_pin: !P2.6 enable_pin: !P2.1 step_distance: 0.006240639 endstop_pin: !P1.29 # P1.28 for X-max position_endstop: -1 position_min: -1 position_max: 305 homing_speed: 65 second_homing_speed: 5 Au delà des paramètres présent dans l'un et pas dans l'autre, ça je peut m'en arranger, ce qui m'inquiète c'est la définition des pin qui ne sont pas identiques. arxx pour l'n "t Px.y pour l'autre. Une âme charitable pourrait m'expliquer le pourquoi? -
BL Touch - méthode Guero Loco - X1
AlphAndruino en réponse au topic de elliryc_niamreg dans Artillery
Merci