.jpg.8c3870515f90c023f5fce5136ea07aae.jpg)
experteas
-
Compteur de contenus
10 -
Inscrit(e) le
-
Dernière visite
Récompenses de experteas
")





-
.thumb.jpg.656d783b4bf74416f56bddb7ec2d2b20.jpg)
Problème chevauchement PrusaSlicer
experteas a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
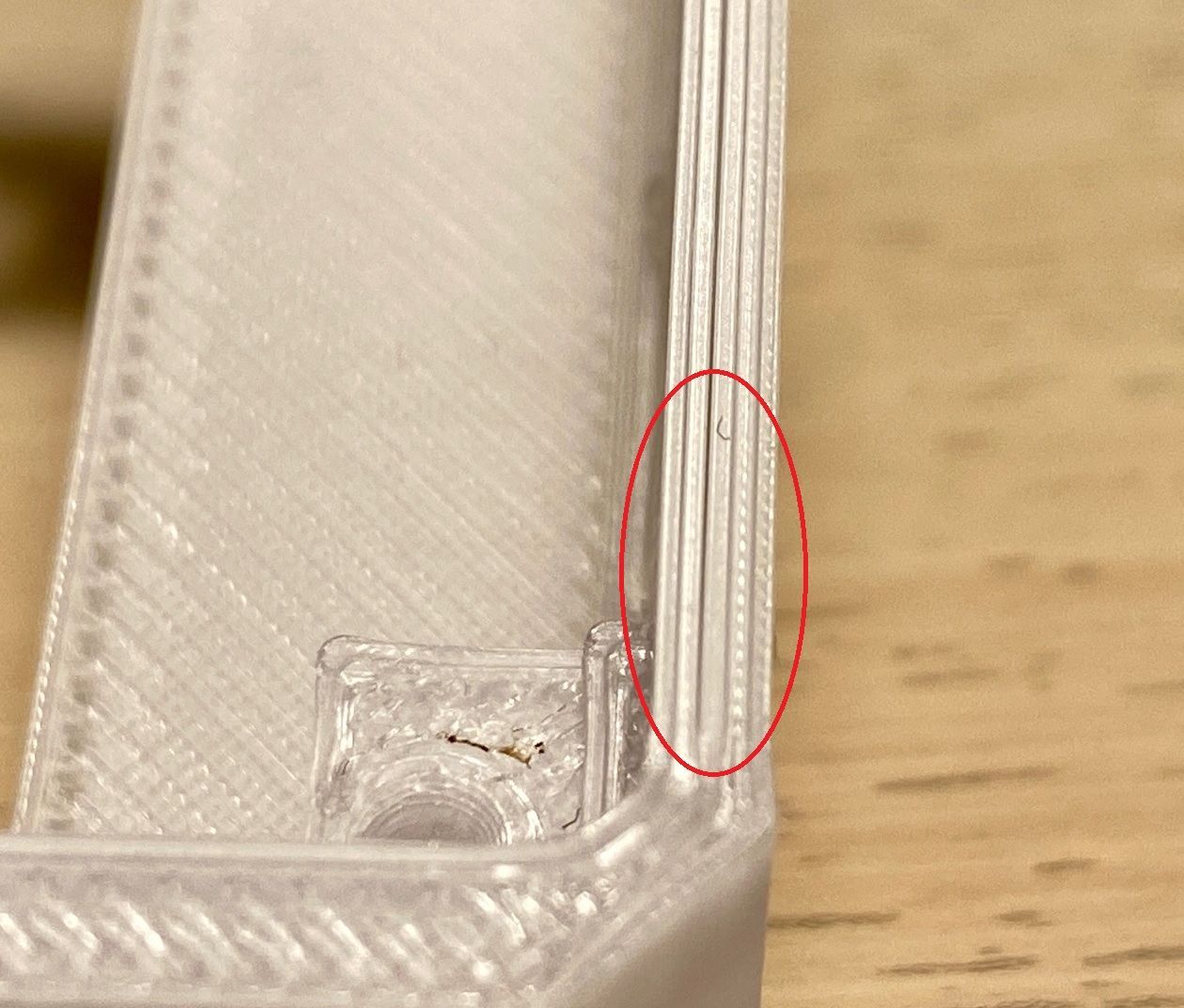
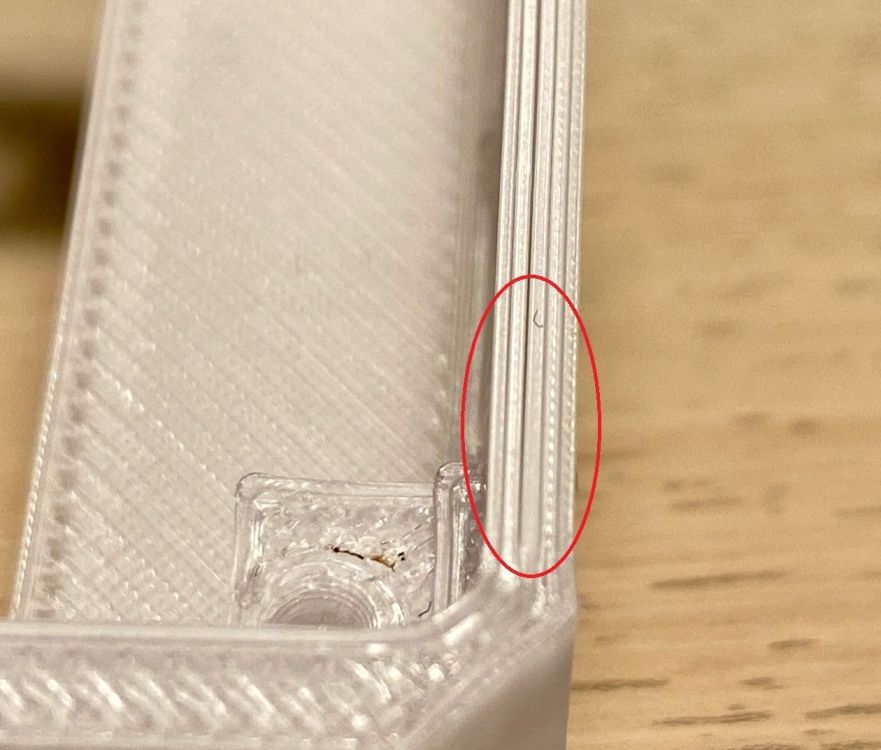
Bonjour à tous, Je fais appel une nouvelle fois à vos lumières concernant un problème de chevauchement de ligne lors de mes impressions. J'ai depuis peu, changé la carte mère de mon alfawise U20 suite à un mauvaise manip sur la CM original de ma U20. Je tourne maintenant sur Marlin et j'en suis plutôt content bref passons. J'ai également migré sur Prusa Slicer (j'étais sur Cura) et j'avoue que niveau tranchage, on est un cran au dessus. Le soft est plus précis et me pose quelques problème lors de mes dernières impressions je m'explique. Mes parois ne se soudent pas entre elles, voici une photo : Je tiens à préciser que malgré ce soucis, l'ensemble de mon impression est très correct, je n'ai pas de sous extrusion, ma première couche est quasi parfaite. Je précise également que j'imprime en PETG Eryone 1.75 Le fichier STL est une pièce de la Prusa MINI que j'ai choppé sur le site officiel de Prusa donc modélisation de bonne qualité. Voici mes paramètres d'impression : Température BED / BUSE : 65° / 235° Hauteur de couche : 0.2mm Débit : 100% Largeur d'extrusion par defaut : 0.45mm Largeur couche/périmètre/périmètre EXT/remplissage : 0.5mm Limite hauteur de couche MINI : 0.08mm Limite hauteur de couche MAX : 0.28mm J'ai comparé avec Cura le même fichier, le même PETG avec les même paramètres et pas de problème... J'entendu déjà dire "reste sur Cura alors..." Mouai ok mais ca ne résout pas mon soucis. Est ce que l'un d'entre vous aurai une petite idée ? Réduire simplement la largeur de couche ? Merci d'avance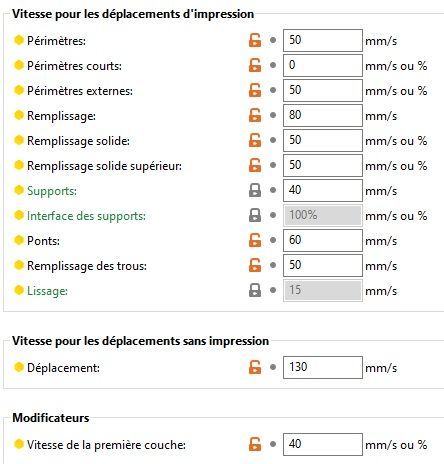
-
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
Hello, Petit retour sur mon (mes) problème(s). Je suis revenu sur les contacteurs de fin de course et j'ai abandonné le SENSORLESS, je n'arrivais pas à ce que je voulais (auto home impossible etc) Résultat avec les switchs c'est beaucoup plus simple^^ J'ai cependant du activer #define ENDSTOP_NOISE_THRESHOLD 2 pour que les homes fonctionnent correctement. Question 1 : Est ce que l'un d'entre vous pourrait m'éclairer sur cette fonction obscure ? (j'ai lu qu'activer cette fonction pouvait réduire la qualité des prints) Question 2 : J'ai dessouder la pin de mes drivers X/Y/Z, est ce que je dois faire la même chose pour l'extrudeur ? (je ne l'ai pas fais dans le doute, il semble fonctionner correctement) Voila voila -
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
La tu m'a clairement perdu ahah A mon souvenir je n'ai rien déclaré au sujet des pins, est ce que tu peux développer un peu s'il te plait ? J'ai l'impression que c'est dans ce coin là qui l'on défini les paramètres concernant le HOME etc. Je me dis que peut-être j'ai mal fais quelque chose ici. Je te l'ai dis, il y a pas mal de zone d'ombre -
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
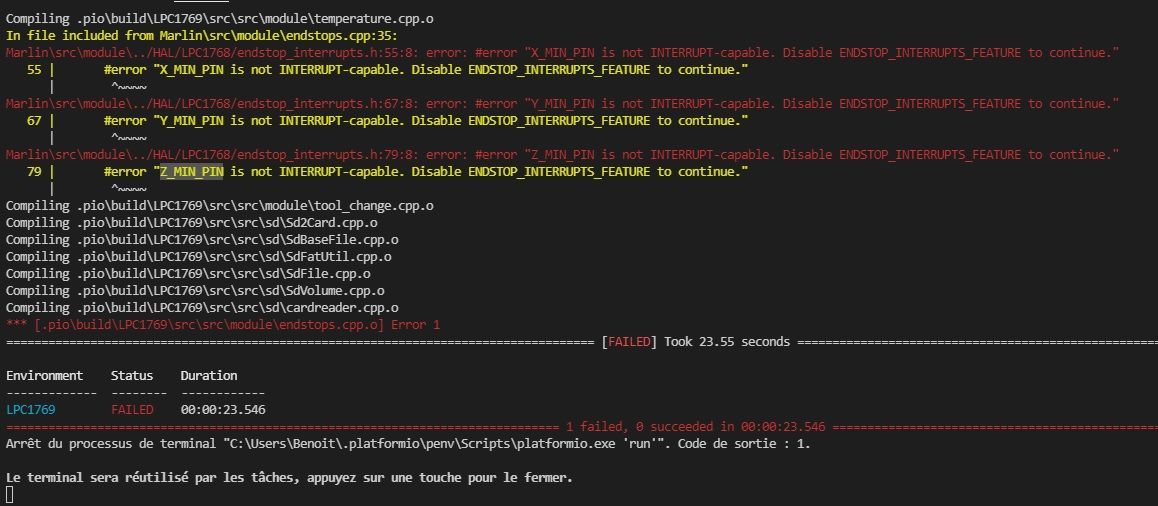
Re, J'ai limité la température à 100 par ce je ne dépasse pas 70°c lors des mes impressions (6O° pour le PLA et 70° pour le PETG) J'ai mis 100° en sécu au cas ou je ferais une mauvaise manip, les connecteurs sur la U20 sont pas foufou et un courant trop fort risquerait de faire tout fondre (peut-être pas mais, on se sait jamais) Pour ne rien te cacher, l'affectation des ports COM reste une zone obscure pour moi.. Si j'ai bien compris le SERIAL PORT sert à déclarer la carte SKR 1.4 turbo et le SERIAL PORT_2 sert à déclarer le TFT 35 ? j'ai bon m'sieur ? ^^ Je vais inverser les deux pour checker C'est pas bête de comparer avec le marlin de la U20, ou l'as tu trouvé ? peut-être ici ? Etant donné que je commence tout juste à mettre le nez dans marlin, j'ai encore un peu de mal avec l'architecture et certains terme tel quel ENDSTOPPULLUPS ou ENDSTOP_INTERRUPTS_FEATURE mais j'apprends au fur et à mesure. Concernant les ENDSTOPPULLUPS : Les désactiver nécessite de retirer le SENSORLESS_HOMING, ce qui est fâcheux dans mon cas car j'aimerais supprimer les fin de course X&Y. Dans le cas de l'upgrade la U20 je pense que les endstoppullups sont décommentés car il y a toujours les capteurs fin de courses. A la rigueur, ça vaudrait le coup que je branche les capteurs X,Y,Z et que j'essaie sans les endstops Concernant ENDSTOP_INTERRUPTS_FEATURE : Je n'arrive pas trop à trouver à quoi correspond ce paramètre. Quoi qu'il en soit lorsque je décommente j'ai cette erreur : Pour répondre à ta question après flashage, non je ne fais jamais de reset avec M502 puis M500 pour save. Cependant je fais "initialiser EEPROM" dans configuration>configuration avancée, après modif de la config. Je ne sais pas si c'est utile d'ailleurs. Lorsque je fais une modif sur VSC, je "build" puis je copie sur la SD que j'insert ensuite dans la carte mère (je me doute bien qu'un process plus simple doit exister, je fais ça à l'ancienne lol) Question autre : Est ce que mon problème ne ce situerait pas dans la section z probe option Un grand merci pour ton aide et ta patience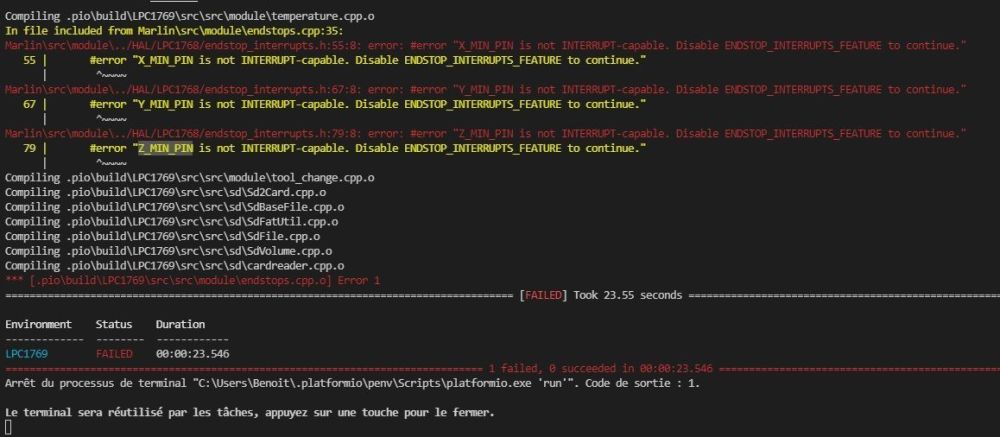
-
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
Alors, J'ai décommenté #define BABYSTEPPING pour voir ce que ça donne et il y a du bon comme du mauvais je m'explique. 1er démarrage de l'imprimante, lorsque je lance une autohome, le HOME X ok, HOME Y ok aussi mais le Z ne veut rien savoir. Il monte de la distance du BUMP.. J'ai tenté de désactiver le BUMP, à part laisser les axes en tension, ça ne résout pas mon problème. Par acquis de conscience j'ai inversé le switch du Z par celui en X mais les deux semblent fonctionner correctement (testé au multi aussi au cas ou..) La seule fois ou j'arrive à faire un HOME Z correct c'est au 1er démarrage de l'imprimante et lorsque je commence pas un HOME Z. La ça fonctionne correctement, qu'importe ma position de Z, l'axe descente jusqu'à activer le fin de course. J'avoue que je sèche complet.. J'hésite à recommencer ma compile Marlin de zéro au cas ou j'aurais fais une bêtise quelque part mais pas sûr que ce soit la bonne solution. Bye -
experteas a changé sa photo de profil
-
Hello, Nouveau sur ce forum mais pas en impression 3D je tente ma 1ère réponse J'ai comme toi une U20 depuis un moment donc je peux essayé de te donner 2/3 pistes. Effectivement, un extrudeur qui saute est souvent lié à la partie hotend de l'imprimante (la partie chauffante). La première chose que j'aurais fais à ta place c'est dévisser le raccord sur lequel est maintenu le PTFE afin que tu puisse tester l'extrudeur sans avoir à passer le PLA par la buse (qui peut être en mauvais état). N'oublies pas d'extraire ton fil avant de démonter ton raccord sinon tu n'y arrivera pas (extrait le fil avec la buse chauffée) Ainsi, une fois l'imprimante chauffée, tu extrude un peu de PLA et tu vois ce que ça fait. Si ça ne saute plus, ne cherche pas tu as un problème avec le hotend. Si ça saute toujours la c'est relou Et dans le pire des cas, si t'en veux plus, je te la prends
-
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
Hello, Après un petit moment d'absence, me revoila. Merci fran6p pour le tuto sur les TMC, il m'a bien aidé, merci Poisson 21 pour tes conseils, vous êtes au top J'ai donc suivi tous vos conseils et j'ai modifié courant et Vref. Courant moteur : Irms > courant crête / 1.414 (racine de 2) Irms = 1200 mA RMS J'ai donc modifié les valeurs de X & Y et j'ai laissé le Z et l'extrudeur à 800mA (paramètre par defaut). J'ai bien compris qu'il faudrait quand même vérifier la température des moteurs pour être sûr qu'ils ne chauffent pas trop mais normalement ça devrait le faire (à priori) Sensibilité : ici j'ai augmenté la valeur à 120 (initialement à 8 ) et X&Y s'arrêtent sans forcer en butée donc je suis plutôt content. Il faudra peut-être modifier ses valeurs à l'avenir, ce sera des tests à faire. Capteur fin de course Z : J'aime pas couper, j'ai donc dessoudé la pin en trop sur le DRIVER du Z et pluger mon capteur en lieu et place sur la SKR, inversé l'état logic du capteur et miracle ça fonctionne MAIS lorsque je fais un Z home, l'axe monte un tout petit peu puis s'arrête > le home ne fonctionne pas Pourtant, lorsque je fais bouger l'axe Z via marlin, l'axe monte et descend dans le bon sens et quand j'appuis sur le capteur, l'axe s'arrête correctement.. Comprends pas trop mais je fouille Question 1 : Pourquoi ne pas monter le courant moteur Z à 1200mA également vu que c'est le même moteur que les autres ? Afin que le l'axe Z reste en position fixe, ne faut-il pas que le courant soit en cohésion avec le type du moteur utilisé ? Peut-être qu'il n'a pas besoin d'autant de courant pour resté fixe auquel cas, un courant trop haut (1200mA par ex) le ferait trop chauffer ? Question 2 : L'extrudeur peut-il rester à un courant de 800mA ? ou faut-il ajuster en testant ? Encore une fois merci pour votre aide Configuration.h Configuration_adv.h EDIT J'ai essayé de toucher à ça : #define X_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Y_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Z_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. #define X_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Y_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Z_MAX_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. #define Z_MIN_PROBE_ENDSTOP_INVERTING true // Set to true to invert the logic of the probe. J'ai modifié les Z_MIN_ENDSTOP // Z_MAX_ENDSTOP & Z_MIN_PROBE, je suis passé de false à true pour tester. L'axe Z bouge un peu plus longtemps (vers le bas) lorsque j'essaie un home. Par contre la distance de mouvement varie d'un home à l'autre c'est très étrange ^^ Je continue de fouiller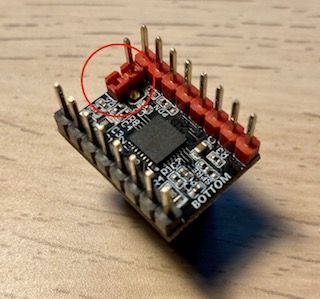
-
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
Hello, Alors j'ai suivi vos conseils et voici ce que j'ai fais depuis : Je suis passé sur marlin 2.0.9.2, fais toutes mes modifs et ça fonctionne MAJ du firmware du TFT 35, good aussi Modifié mes PID (bed & buse), je n'ai plus d'alarme c'est top. Pour résoudre mon problème de sensorless, j'ai pas mal planché sur le réglage en courant et tension de mes moteurs, et la je bloque.. On trouve un peu de tout sur les forums, j'ai l'impression que tout le monde y va de son calcul, pas facile de faire le tri. J'ai bien compris que il n'y avait pas de vérité générale, nos moteurs ne sont pas tous identiques. J'ai mesuré la tension ref des TMC 2209 tel que je les ai reçu : X= 1.244v Y= 1.259v Z= 1.253v E= 1.236v Voila ce que j'ai compris: Concernant les TMC 2209 et leurs donnés constructeur, je suis parti de la doc BTT TMC 2209 J'ai utilisé la vidéo de amis GueroLoco pour la Vref Pour la Vref Après recherche, mes moteurs (42BYGH 40H-2-19D) tourne à 1.5A en courant "nominal" et 1.7A max Courant Irms = (Vref x 1.77) / 2.5 Or il existe une autre formule > Courant Irms = Imax / 1.414 Vref = (Irms x 2.5) / 1.77* {la donnée 1.77 peut-être aussi de 1.9 semble t-il, ce qui correspondrait à la marge de sécurité ?) Si je suis les calculs du Guero, cela me donne : Irms = 1.7A / 1.414 Irms = 1.2A {Si c'est la valeur à remplacer dans #define X_CURRENT....800, cela me parait un peu élevé comme valeur) Vref = (1,2 x 2.5 ) / 1.77 Vref = 1.69v Est ce que ce serait les paramètre à modifier dans marlin et sur le driver ? Merci d'avance et encore, pour votre aide platformio.ini Configuration.h Configuration_adv.h -
Endstop SKR 1.4T + 2209 // Help me
experteas en réponse au topic de experteas dans Entraide : Questions/Réponses sur l'impression 3D
Hello, Tout d'abord merci pour ta réponse. Comment passer pour un nœud dès le première post, check Effectivement, les lignes n'étaient pas décommentées.. c'est une erreur de ma part, j'ai juste pas fais attention, merci d'avoir regardé. Pour le BIP, je vais me pencher sur le calibrage des PID, les sondes sont d'origines comme toute l'imprimante d'ailleurs. Merci pour les infos du TFT, je vais plancher dessus également. Bonne soirée. -
Bonjour à tous, Je me présente, Benoit, 31 ans, nouveau fraichement arrivé Je me suis inscris sur ce forum après des heures passé derrière mon écran, chercher, fouiner et cliquer font partie da ma passion d'imprimeur fou. j'ai découvert l'impression 3D en 2019, ce qui m'a poussé à l'achat d'une alfawise U20 puis d'une anycubic photon un an plus tard. J'ai toujours eu les mains dans la bricole, électronique, auto/moto, bâtiment, ma femme aussi (#bof) Tout ça pour dire, que je suis ravis de faire partis des votres, j'essaierai de participer si mes connaissances me le permettent et si le sujet me parle.. A bienôt Ben.
-
Endstop SKR 1.4T + 2209 // Help me
experteas a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour à tous, Après de longue heures de lecture sur ce forum, me voila inscris pour faire appel à vos lumières. TOPO : J'ai une alfawise U20 (standard) depuis presque 3 ans. J'en suis très content, j'ai passé plusieurs Kg de PLA & PETG dessus avec succès. J'utilisais Octoprint (via Rpi) pour mes print, plus simple et meilleur contrôle J'ai toujours utilisé Cura, j'ai pas mal creusé ce slicer, fais beaucoup de test et jamais de problème bloquant. Malheureusement, suite à une mauvais manip, la carte mère d'origine à rendu l'âme Projet : Je me suis offert une SKR 1.4 turbo avec des TMC 2209 V1.2 et un TFT 3.5 V3.0 Je compte utilisé des MOSFET (bed et buse) Passer toute l'électronique en standalone sous l'U20 Découverte de MARLIN et ce n'est pas une mince affaire... GALERES Résultat des courses je sèche sur pas mal de point, même avec ma config assez simple. Malgré toutes mes recherches sur les forums, YouT, en français en Anglais, je perds chaque jour un peu plus de tiff et dieux sait qu'il ne m'en reste plus beaucoup ^^ Ce que j'ai fais HARDWARE : Câblage moteurs ............. (42BYGH 40H-2-19 D) Pose TMC 2209 ............... (avec un seul cavalier, je n'ai rien coupé) Câblage alim 24V ............ Câblage TFT .................... Capteur fin de course ..... (j'aimerais faire sans) Modifié la Vref ................. Ce que j'ai fais MARLIN 2.0.x bugfix: Je précise que je suis partis de la config marlin préparée pour la SKR 1.4, téléchargée sur le github lien github SRK 1.4 Déclaré l'environnement .................................... Déclaré la carte mère ......................................... Défini les ports série .......................................... Déclaré les TMC 2209 ....................................... Baissé le BAUDRATE à 115200 ......................... Modifié le sens de rotation moteur .................. Vérifié diamètre filament .................................. Modifié la température BED MAX .................... Modifié la TEMP MIN EXTRUDE ....................... Défini paramètres préchauffage PLA & PETG Défini SENSORLESS ........................................... (rentre en conflit avec les endstop settings je pense) Modifié les courants d'axes .............................. Modifié les PID ................................................... (j'attends les tests de print) J'en oublie forcement.. Mes premiers tests : La CM fonctionne bien, le TFT aussi (les é mode fonctionnent correctement) Les moteurs tournent dans le bon sens Le plateau et la buse chauffent Lors du X_HOME, le moteur force de ouf en butée malgré avoir testé plusieurs sensibilité La ou je sèche : le SENSORLESS (je garderai le switch pour le Z bien sur) Montée en température de la buse (à 100°, la carte fais bip bip = je panique) Surement d'autres point que je n'ai pas encore abordés, qui viendront à la suite (si vous l'acceptez ) Voyez en ce post une demande d'aide, je commence l'exploration de MARLIN. Je ne suis qu'au début de mon upgrade et risque d'avoir beaucoup de question dans mon aventure. J'aimerais souligner que je ne suis pas une bille en électronique, j'ai fais des études (lointaines) en électronique (BEP & STI). Si ce post gène ou qu'il est redondant, je le supprimerais, mon but n'est pas de faire de doublon Je vous laisse les ficher : configuration.h // configuration_adv.h // platformio.ini Un grand merci d'avance à vous tous Respect robustesse Configuration.h Configuration_adv.h platformio.ini