vic78
-
Compteur de contenus
12 -
Inscrit(e) le
-
Dernière visite
Récompenses de vic78
")





-
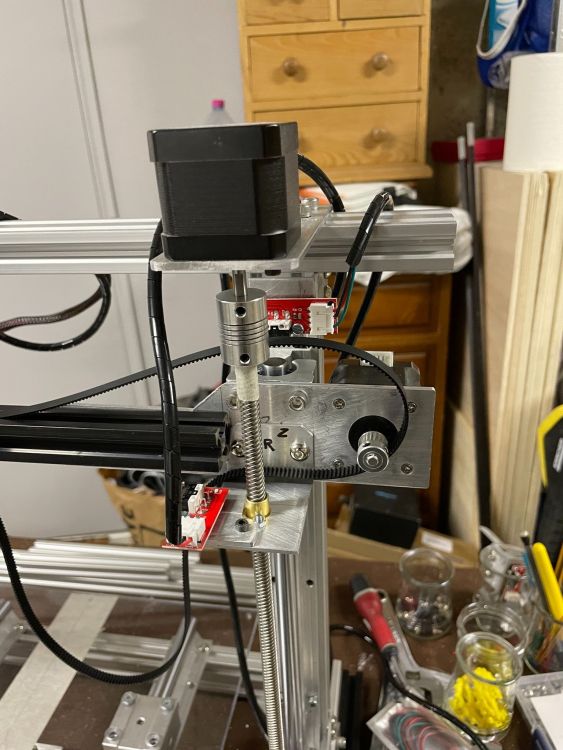
Bonjour à tous et une très très bonne année 2024 Un tout petit REX sur les travaux réalisés : * Comme le précisait @Lorenzo78 une tige fileté n'est pas adéquate à une imprimante 3D pour les raisons qu'il évoquait, donc => Changement par une courroie. * Le fait qu'elle (l'imprimante) soit opérationnelle j'ai pu imprimer un support pour le moteur et un tendeur. * Un autre constat concerne le réglage du plateau (distance plateau / buse) => Fabrication et installation d'un clone BLTouch trouvé sur le net (utilisation d'un fin de course mécanique avec un servomoteur), pas évident de trouver l'offset de l'axe Z mas une fois fait c'est sacrément mieux. * Un autre sujet, l'imprimante se trouvant au sous-sol non chauffé des effets de warping sont apparus sur mes impressions (il y fait 15° en ce moment) malgré un plateau chauffé (pour l'instant je n'imprime que du PLA). Du coup un caisson s'impose, comme les dimensions sont "hors norme", exclu les solutions basées sur les tables Lack d'I**a, je suis parti sur un caisson DIY en consolidant les informations récupérées dans les divers forums. Pour l'instant j'en suis au châssis en bois de 44mm x 44mm qui est largement suffisant, en termes de dimensions j'ai 70cm x 70cm en largeur/profondeur et 130cm de hauteur. Les 130cm de hauteur se justifient par le fait de vouloir équiper le caisson d'un espace de rangement sur la partie basse du caisson. Il sera équipé d'un système de refroidissement et d'un filtre à particules. Sur les équipements du caisson je suis preneur de toute suggestion et/ou idée (je vous en remercie) Bien amicalement Vic
-
Merci Pat30, En toute modestie je ne m'attendais pas à un tel résultat du premier. Je vais approcher l'extrudeur un peu plus du plateau (qui doit bien frotter sur la feuille de papier). Cordialement
-
Bonjour, Me revoilà 5 mois après mon dernier message. Après avoir réglé quelques problèmes (carte MEGA accidentellement HS entre autres) j'ai finalement fait le premier test hier. Je vous poste la photo du tout premier objet - Premier "vrai" objet (gabarit de perçage pour un montage en cours), je pense que la première couche n'est pas assez "écrasée", image du bas Dites-moi ce que vous en pensez Bien cordialement

-
Bonsoir à tous, Je reviens vers vous car je fais les branchements et quelques test. Premier problème : les EndStops ne fonctionnent pas quel qu'il soit l'état la commande M119 me renvoie toujours "OPEN" J'ai vérifié au multimètre et au repos j'ai bien le connecteur fermé et ouvert s'il est actionné. Par contre Marlin / Ramps ne le voient pas de cette façon. Avez-vous des pistes d'analyse ? Après un rapide diagnostique au multimètre que crois avoir une piste. Je vous tiendrai au courant. Vic
-
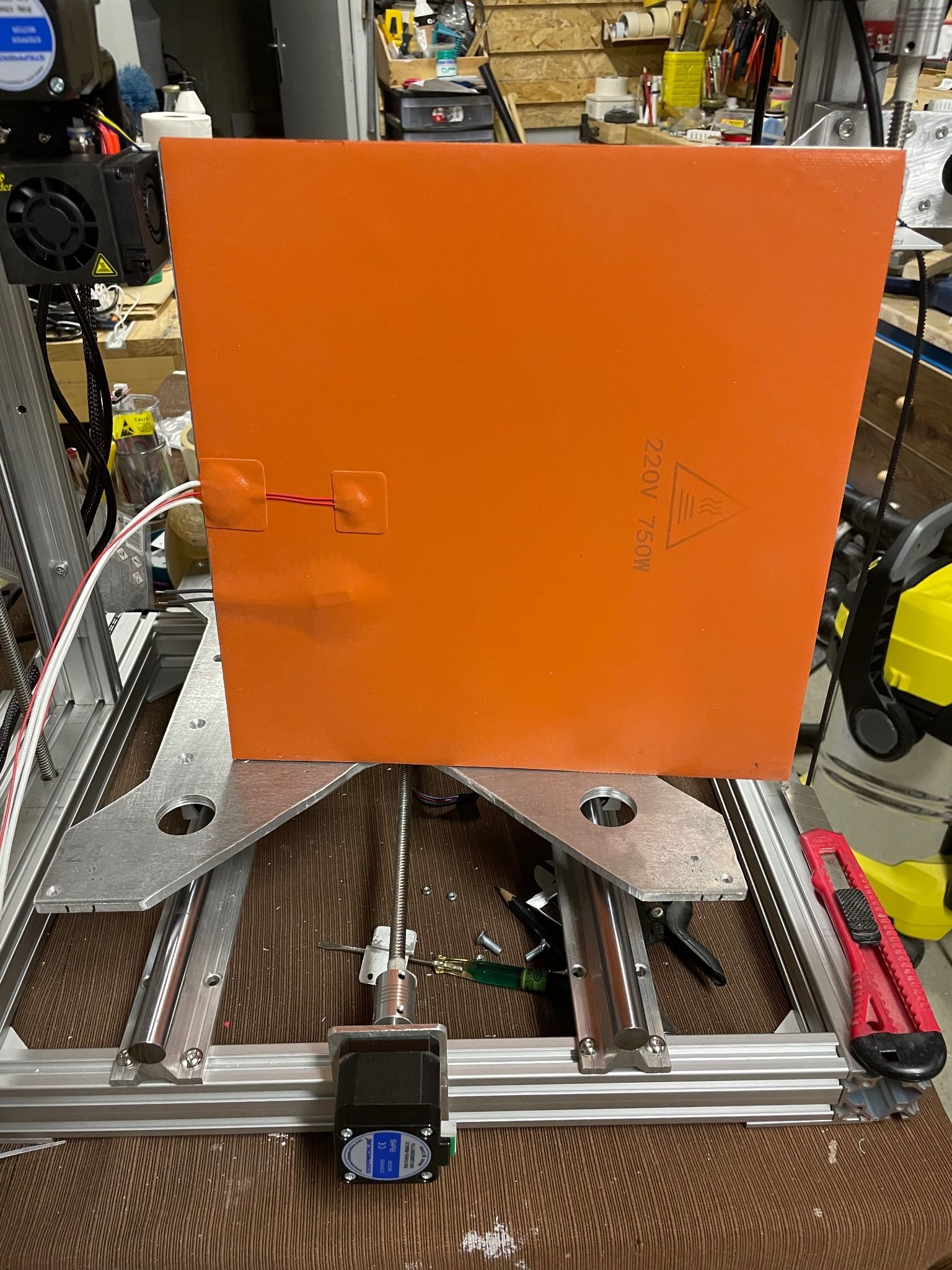
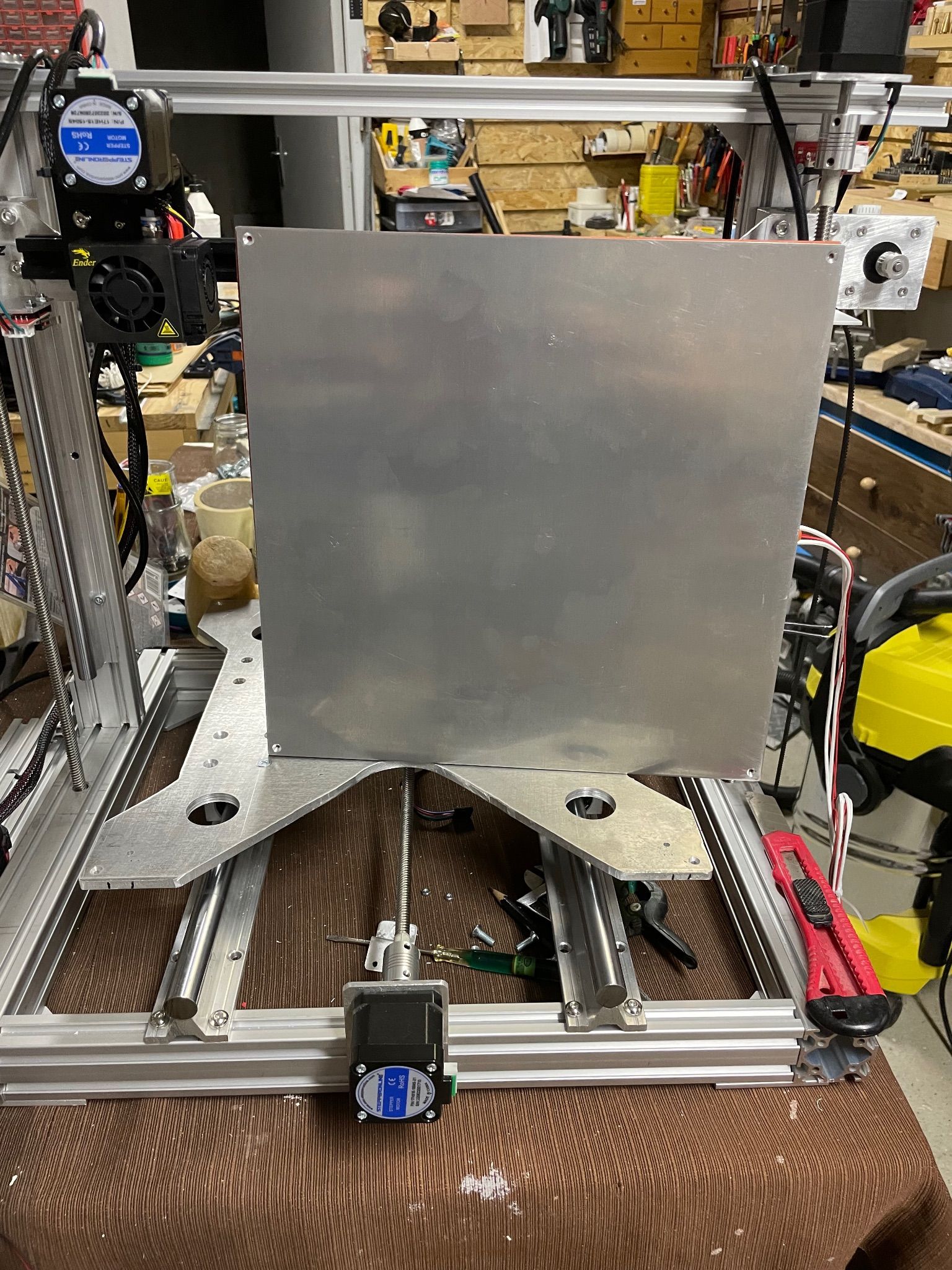
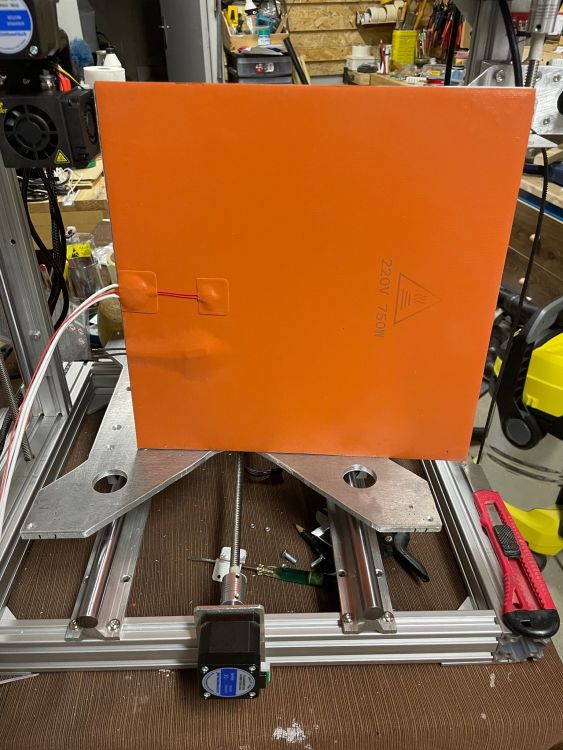
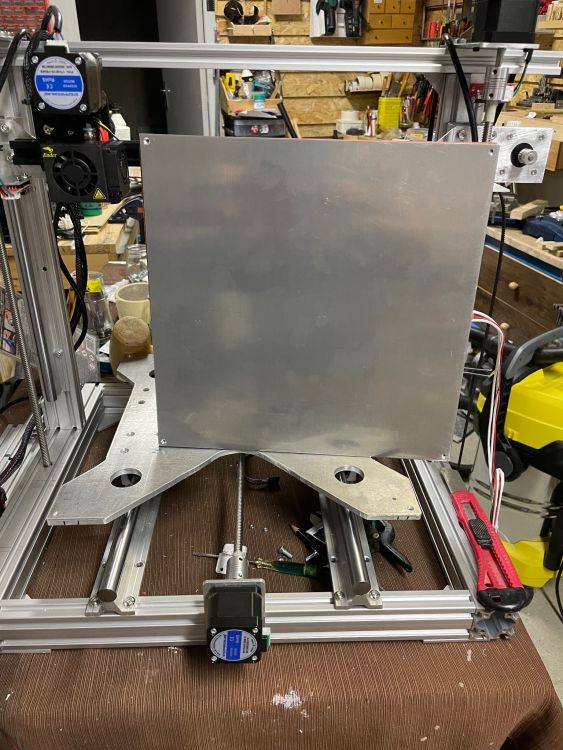
L’aventure continue. plateau en alu de 3mm et lit chauffant en silicone
-
Merci Savate pour ton retour. Tes réponses apportent d'autres questions, pour l'instant restons en là. Je garde tes recommandations/explications dans un coin de mémoire. Pour ne pas tout rechanger, l'axe des X garde le principe de courroie comme prévu, pour l'axe Y, comme tout est déjà en place je reste sur la vis sans fin tout en veillant en particulier sur les points évoqués. Par contre oui, une vis à billes serait un bon choix, à voir avec le temps. Vic
-
Bonsoir Lorenzo78, j'ai un peu réfléchi à ton commentaire entre la vitesse de déplacement par courroie et par tige filetée Sur la majorité des informations trouvées sur le net, la configuration de la RAMPS est faite en 16 micro-steps (les 3 cavaliers positionnés) à tort certainement. Quelle est la raison de ce choix, à savoir que pour mon axe Y je n'ai pas retenu de micro-steps. Si j'applique l'équation de calcul de la vitesse de déplacement pour l'un et l'autre (16 micro-steps pour l'axe X et "ful steps" pour l'axe Y, j'obtiens : Moteurs de 200 pas Courroie GT 2 de 2mm Poulie de 16 dents Tige filetée au pas de 8mm Axe X (200 * 16) / (2 * 16) = 100 => Donc 100 pas pour 1 mm Axe Y (200 / 8 = 25 => Donc 25 pas pour 1 mm Sauf erreur de compréhension pour le même nombre de pas, l'axe Y va plus vite (4 fois) que l'axe X Je fais un petit programme sur un Arduino et un L298 pour tester la vitesse de l''axe Y, je vous tiendrai au courant des résultats Vic
-
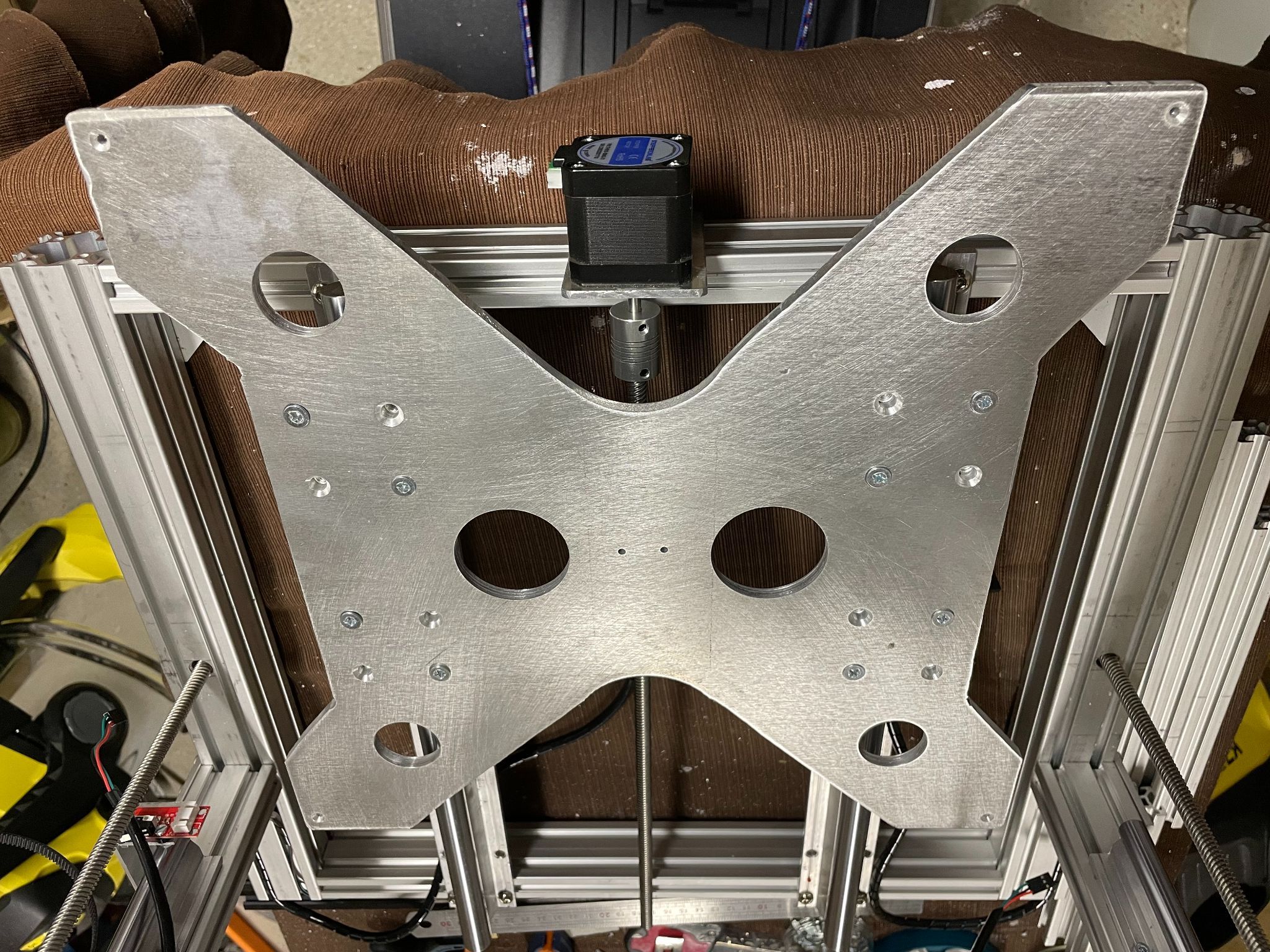
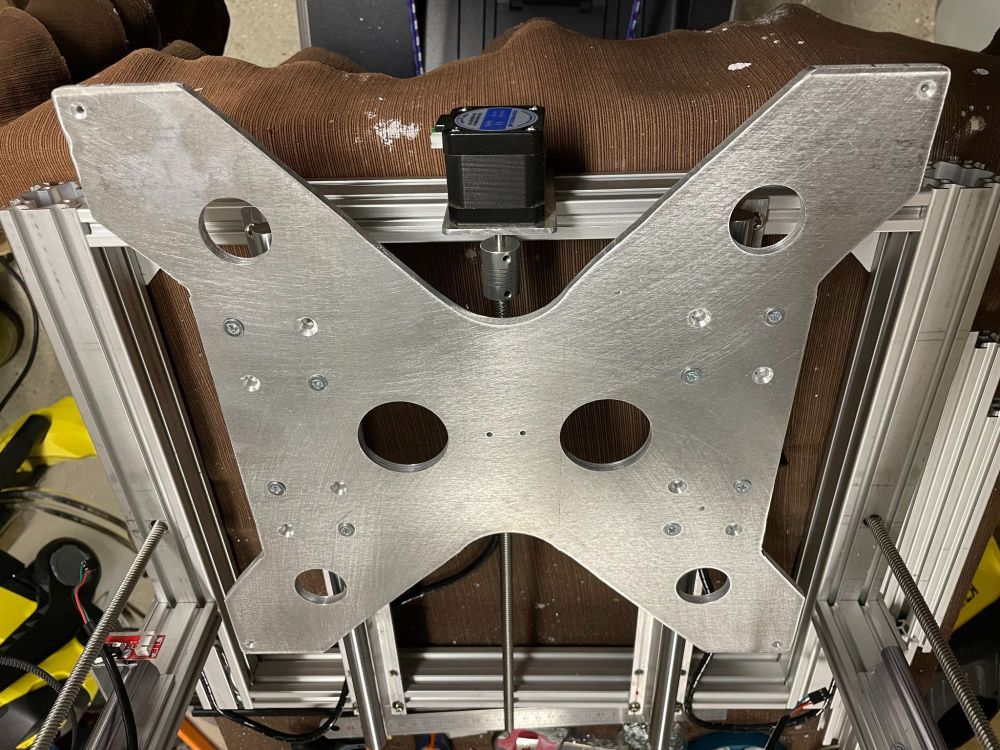
Bonjour à toutes et à tous, Après quelques heures de travail, voici le résultat, j'ai enlevé un maximum de matière pour alléger son poids : Par contre j'aimerai votre retour/avis sur quelques points. Je cherche du coup à fabriquer le lit avec le tapis chauffant et pourquoi pas une plaque de verre, j'ai encore en stock une tôle allu de 6mm, par contre j'ai peur que la masse totale (poids) soit trop importante (moteur NEMA17 des plus classiques). est-ce qu'une tôle allu de 3mm serait suffisante en termes de rigidité ? Sinon qu'y a t-il d'autre comme matériel pour cet usage ? quelle épaisseur pour le verre ? Une dernière question, existe t-il un programme qui permettrait de tester le montage à vide ? Amicalement Vic
-
Merci à tous pour vos retours. Vic
-
Merci @fran6p, je prends note. C'est justement sur ces sujets que j'ai besoin de votre aide/expérience. Mes tiges ont un pas de 8mm/tour, les moteurs sont de 200pas/tour, ce qui fait une résolution de déplacement de 8/200 = 0.04mm par pas moteur, du coup nul besoin configurer des micro pas dans la RAMPS Ce qui n'est pas le cas pour l'axe X. Merci Lorenzo78 pour ton retour. Tu as raison, le mot "voler" n'est pas bien choisi. Oui j'ai gardé une courroie sur l'axe X pour des raisons techniques (ne pas savoir comment la remplacer par une tige et un rail linéaire), c'est là où les limites et le manque de CNC/imprimante 3D se fait sentir. Pour le plateau, je tente un support de plateau en plexi pour l'instant et je compte bien installer un tapis chauffant en silicone et en 220v (que j'ai déjà reçu). Les dimensions ne sont pas standard (400x350) du coup je fais des essais de montage avec du plexi, plus facile à travailler. J'ai une plaque en aluminium de 6mm que j'ai découpé pour y coller le tapis mais je la trouve trop lourde comme plateau, je ferai des essais une fois tout bien branché. Tu as raison sur la rigidité du plateau je me pose la même question, surtout si le socle est en plexi. Reste la possibilité de "fraiser" un support en alu de 6mm du genre : Celui là Voilà mes réflexions et l'état d'avancement Vic
-
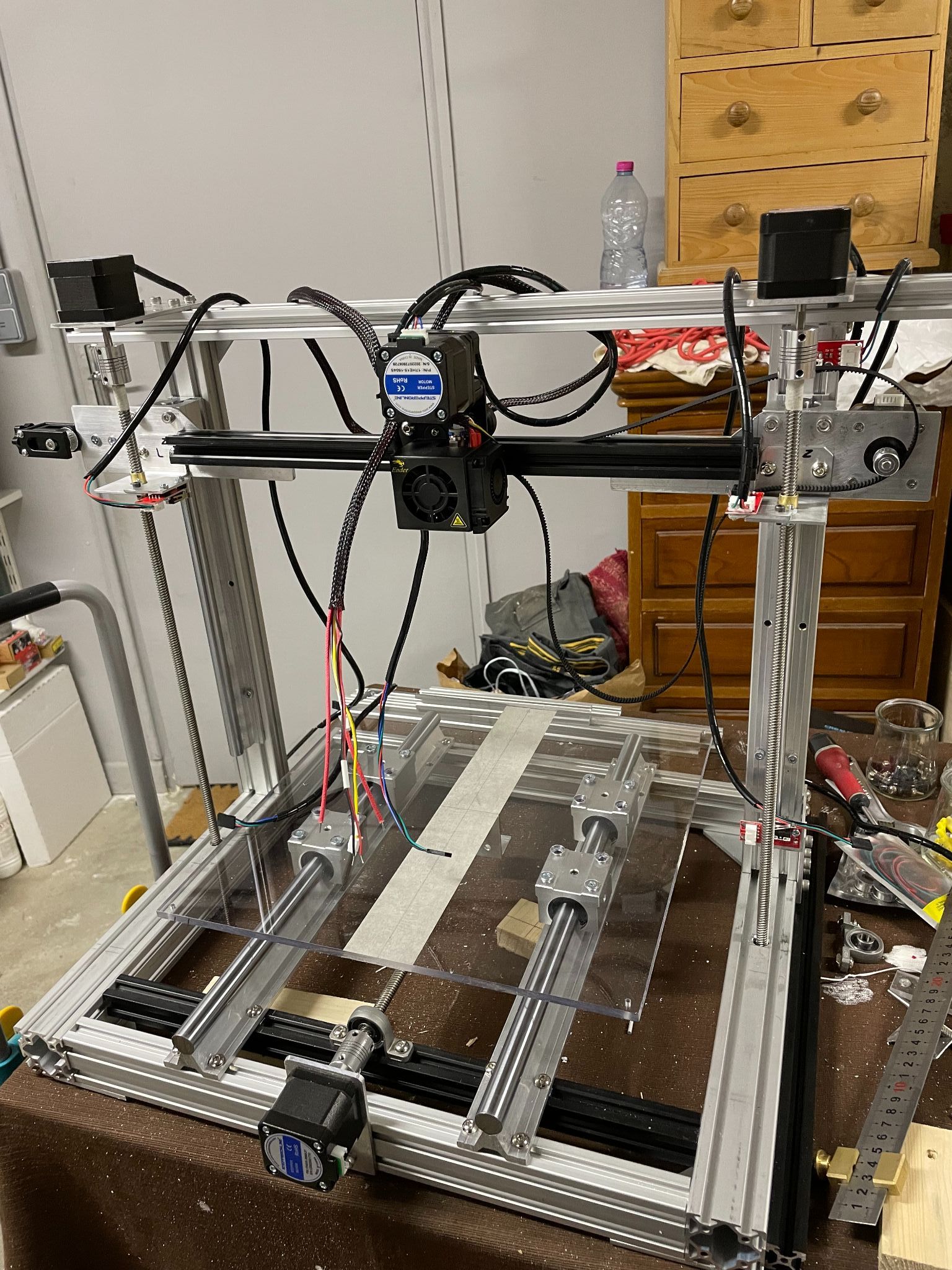
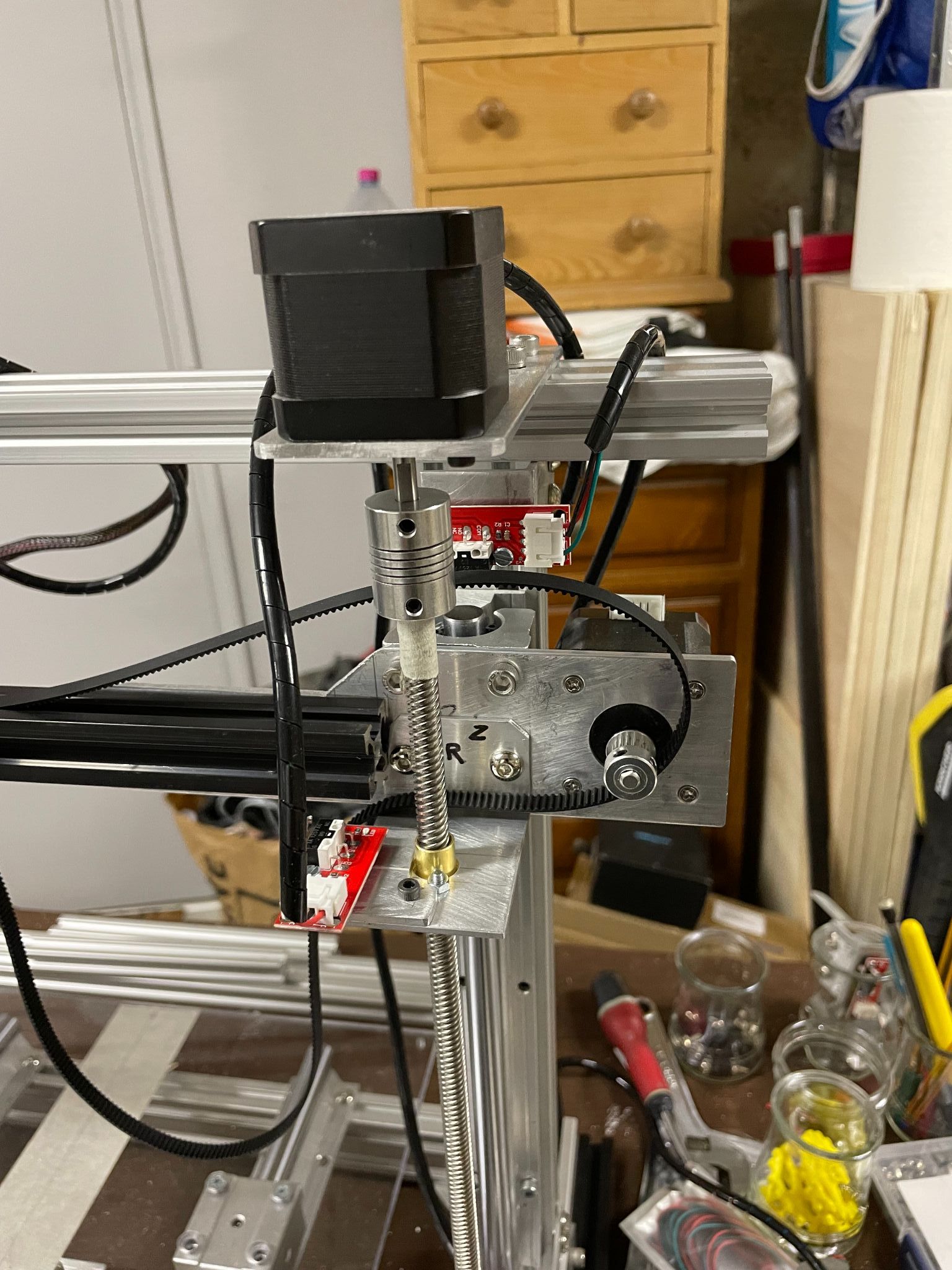
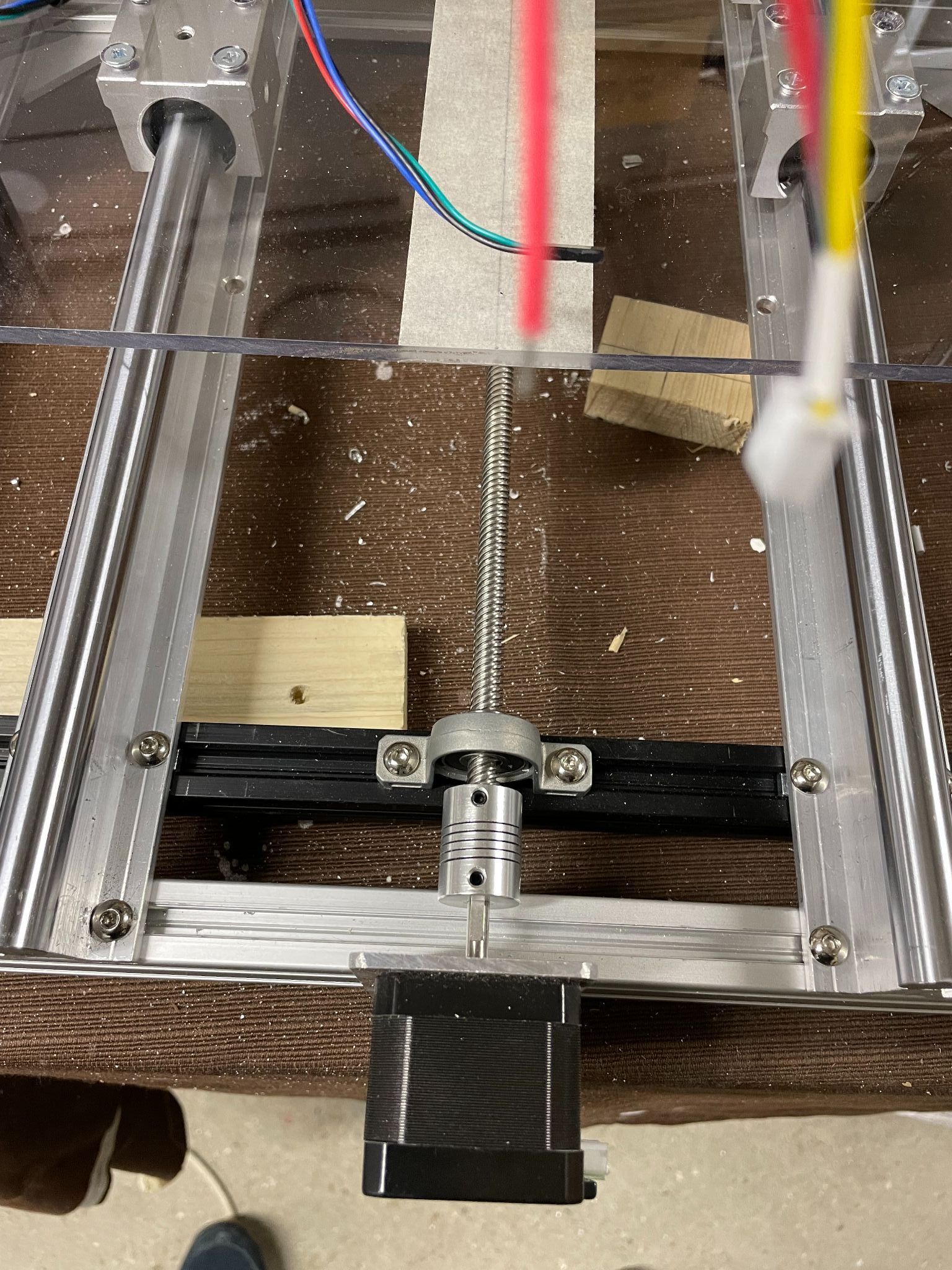
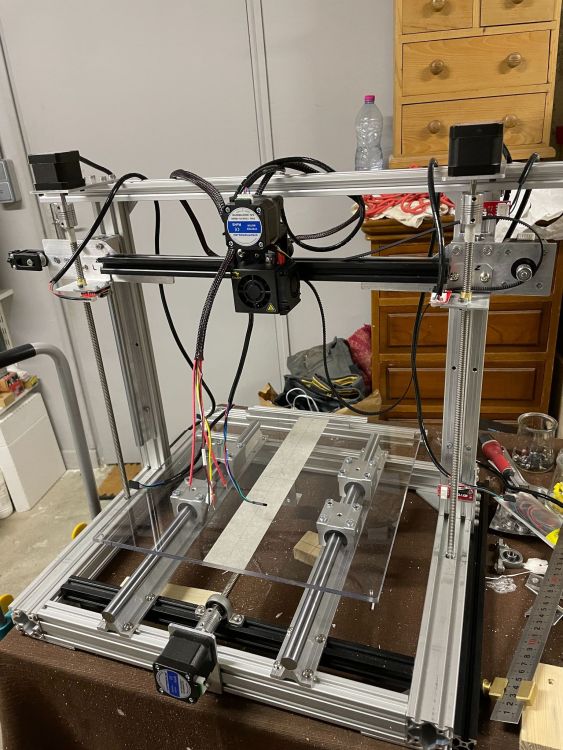
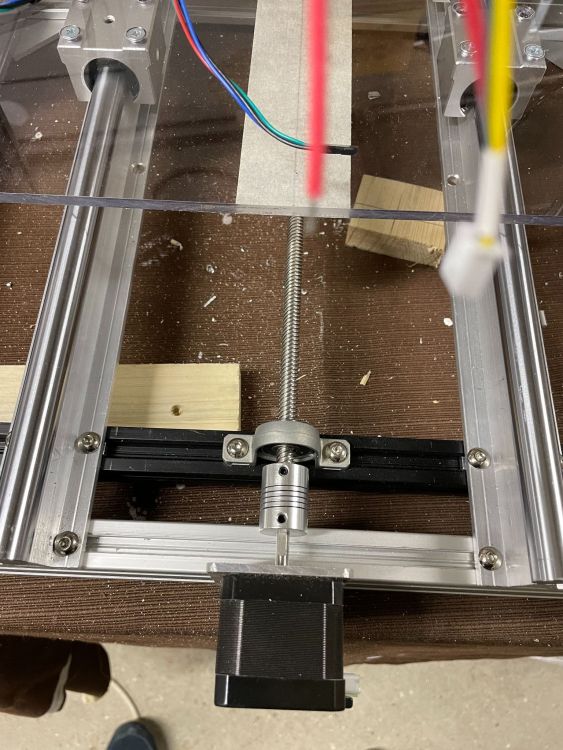
Bonjour à tous, Comme je l'avais précisé lors de ma présentation, je me suis lancé dans la conception de mon imprimante 3D. Sujet entièrement nouveau pour moi, après avoir passé en revue pas mal de postes sur la toile et ne pas souhaité "voler" un quelconque savoir faire je suis parti d'une feuille blanche avec quelques exigences : Pas de modélisation via un logiciel quelconque de 3D (je ne maitrise aucun et pas le temps à apprendre à m'en servir) ça restera principalement un projet pédagogique avant tout et évolutif. composants facilement accessibles (profilés aluminium 2020 /2040 et 4040 basée sur le couple MARLIN 2.1.x (dernière version) + RAMPS 1.4 n'ayant pas d'imprimante 3D, aucun élément plastique supprimer les courroies comme élément de transmission donc : Rails linéaires + tiges filetées et un Kit tête d'impression extrudeur. J'étudie la façon de remplacer la courroie de l'axe des X par une tige filetée et un rail linéaire aussi, peut-être une fois l'imprimante terminée pour pouvoir imprimer quelques éléments nécésaires à cette opération Ci-dessous quelque photos (pas terribles, c'est la pagaille dans l'atelier), J'attends vos commentaires. Vic

-
Bonjour Sébastien et bien venu.
-
Bien venu et j'espère que tu trouveras ton bonheur
-
Bonjour et bien venu
-
Bien venu(e) Seb J'espère comme toi, trouver ici comment se faire plaisir (à mon niveau je n'ai même pas d'imprimante, elle est en construction (début de construction) dans le garage Amicalement