


AH12
-
Compteur de contenus
7 -
Inscrit(e) le
-
Dernière visite
Tout ce qui a été posté par AH12
-
klipper Installation sonic pad sur CR10 Max
AH12 en réponse au topic de AH12 dans Paramétrer et contrôler son imprimante 3D
Si je branche en "Z-" la capteur est toujours "triggered" et ça me génére une erreur quand je commence le palpage. Même avec la pin rétracté il est triggered donc il se met en défaut. -
klipper Installation sonic pad sur CR10 Max
AH12 en réponse au topic de AH12 dans Paramétrer et contrôler son imprimante 3D
Bonjour Pommeverte, Je n'ai toujours pas résolu mon problème et je commence à désespérer. j'ai vu effectivement lors de ma recherche la doc de Klipper et le résultat du test n'est pas probant. J'ai fais la procédure : Exécutez BLTOUCH_DEBUG COMMAND=pin_down, vérifiez que le pointeau se déplace vers le bas, exécutez BLTOUCH_DEBUG COMMAND=touch_mode, exécutez QUERY_PROBE, et vérifiez que la commande rapporte "probe : open". Ensuite, tout en poussant légèrement le pointeau vers le haut avec l'ongle de votre doigt, exécutez à nouveau QUERY_PROBE. Vérifiez que la commande rapporte "probe : TRIGGERED" La dernière étape qui consiste à pousser légèrement le pointeau vers le haut ne fonctionne pas, c'est à dire que la sonde ne se rétracte pas automatiquement et une fois rentrer complètement, la sonde rapporte "open". En réalité elle est toujours détecté "open" sauf si je branche le cr touch en "Z-". Je vais essayer de brancher le signal retour en A11 comme tu l'as proposé et je vous tiens au courant. Merci! Il faut faire un pont entre "Z-" et "A11" ou brancher directement en "A11"? -
klipper Installation sonic pad sur CR10 Max
AH12 en réponse au topic de AH12 dans Paramétrer et contrôler son imprimante 3D
Oui effectivement c'est une traduction automatique. -
klipper Installation sonic pad sur CR10 Max
AH12 en réponse au topic de AH12 dans Paramétrer et contrôler son imprimante 3D
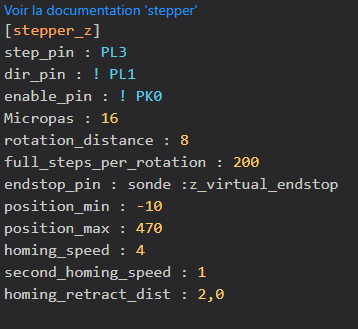
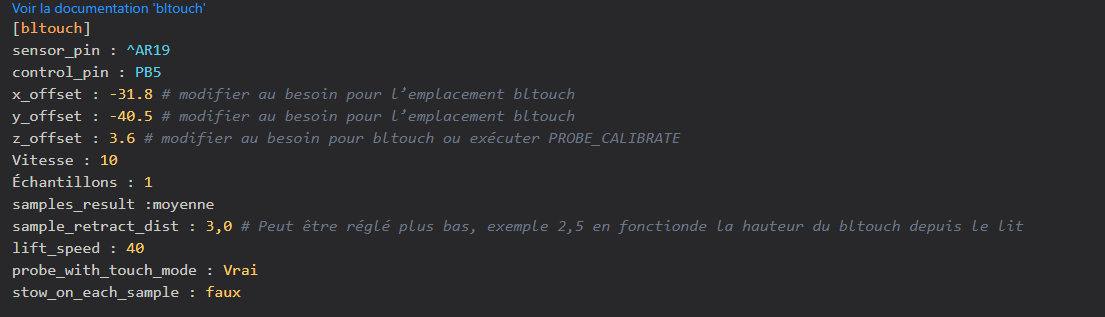
Bonjour, je viens de tester avec ^AR19 et ça ne fonctionne pas non plus. Je me pose aussi la question suivante: est-ce qu'il ne faut pas aussi modifier le stepper_Z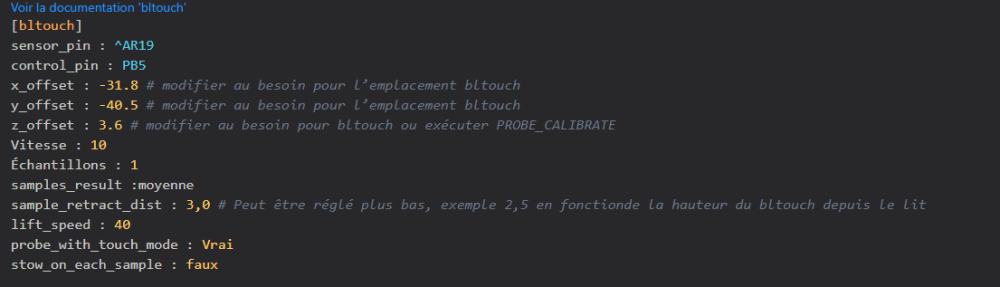
-
klipper Installation sonic pad sur CR10 Max
AH12 en réponse au topic de AH12 dans Paramétrer et contrôler son imprimante 3D
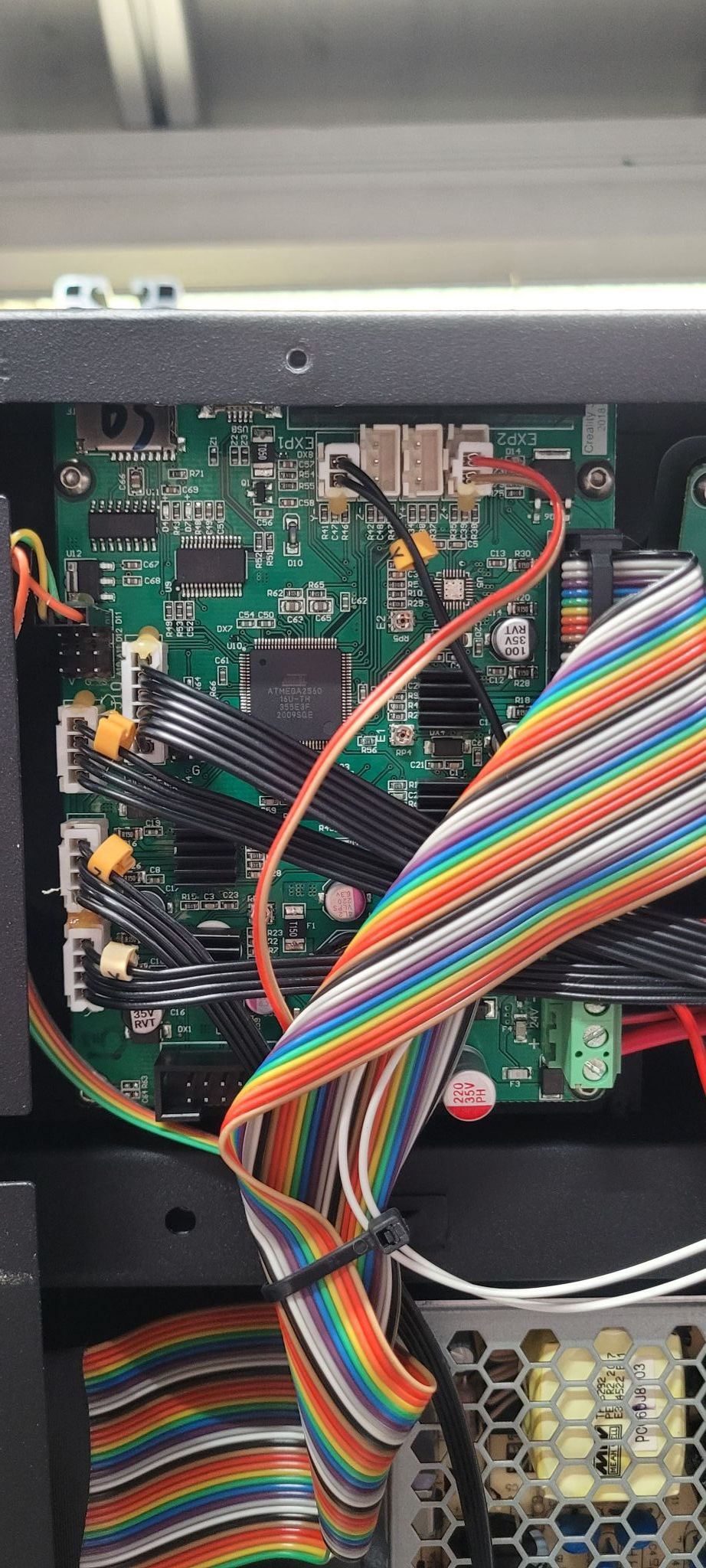
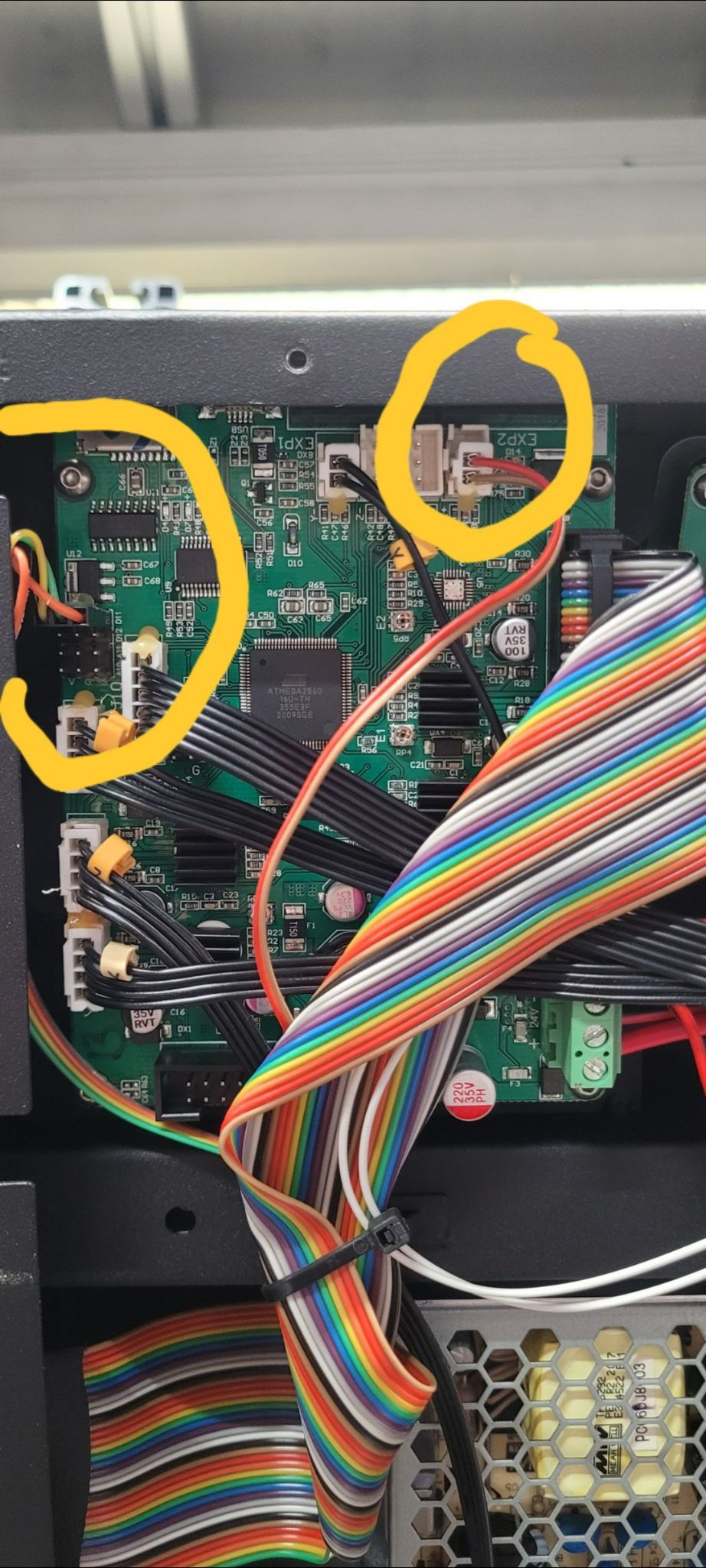
Je viens d'essayer sans le pull up (^): PD3 / PD2. Il n'y a aucun changement J'ai aussi essayé AR18 à la place de PD2/PD3 Idem. Le Cr touch est connecté sur la carte mère (voir photo). Après je ne sais pas comment associer ça au PD2/PD3 ? J'ai pensé à aller voir dans marlin mais je ne sais pas ou trouver le fichier cfg de marlin. Je n'ai que le firmware et c'est un fichier HEX.

-
klipper Installation sonic pad sur CR10 Max
AH12 en réponse au topic de AH12 dans Paramétrer et contrôler son imprimante 3D
Je viens d'essayer et aucun changement, je peux toujours controler la pin (monter descendre) mais pas détecter une zone de contact. J'ai essayé avec ^PD1 ^PD2 ^PD3 ^PD4 sait-on jamais, mais pas de changement non plus. Je pense qu'il faut creuser par là, car si je change ce paramètre mais qu'il n'y a aucune modification alors c'est louche. Je précise que le Cr touch fonctionner très bien que je tourner avec le firmware Marlin. -
klipper Installation sonic pad sur CR10 Max
AH12 a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous, Cela fait deux semaines que tente de connecter le sonic pad à ma cr10 max mais il n'y a pas moyen. Mon imprimante a été modifié avec une tête d'impression Bondtech en direct drive ainsi qu'un CR touch (et pas un BL touch). J'ai testé la procédure standard mais arrivé à choisir la carte mère de l'imprimante donc la Atmega 2560 je ne peux pas compiler le firmware de l'imprimante. J'ai suivi des tutos et personne n'a ce problème donc je ne comprend pas. J'ai donc testé une autre solution. J'ai sélectionné depuis le sonic pad la cr10 V2 avec l'ATMEGA 2560, le firmware se compile et ensuite je peux commencer la phase de test. Je saute l'étape des tests car pas les bon paramètres puis je vais sur le site web du sonic pad pour modifier le "Printer-cfg". Ensuite je remplace le "Printer.cfg" de la cr10 v2 par celui de la cr 10max, je sauvegarde puis je commence les tests par un Z-home. La tête d'impression vient se positionner au centre du plateau après être aller en butée en x et y puis elle commence à descendre, la pin du cr touch descend mais quand elle se trouve en contact avec le plateau elle ne se rétracte pas (ne détecte pas) et la tête vient s'enfoncer dans la plateau sans jamais s'arrêter (donc j'éteint très vite l'imprimante). Ma question est pourquoi le cr touch ne détecte pas. De plus, j'arrive à piloter la sortie et la rétractation du cr touch depuis le site web sonic pad avec les commandes : 11:47:36 // Sending BLTOUCH_DEBUG COMMAND=pin_down 11:47:47 $ BLTOUCH_DEBUG COMMAND=pin_up 11:47:47 // Sending BLTOUCH_DEBUG COMMAND=pin_up Je vous mets le fichier cfg # !Creality CR-10 Max with Sprite Pro # Creality CR-10 Max configuration for Creality Sonic Pad by JoniK # Based on CR-10S Pro V2 and Ender S1 Pro = Sonic Pad model.cfg to suit # Creality V2.4 8 bit mainboard and Fluidd # Firmware should be compiled for the AVR atmega2560 # Creality CR-10 Max has Sprite Pro extruder so thermistor and rotation_distance values will be different to standard # Please ensure you PID autotune your heaters rather than just using my PID values # This machine is fitted with a BLtouch so X,Y & Z offsets will need to be calibrated too # Serial address /dev/serial/by-id/usb_serial_* # DO NOT COPY THIS FILE WITHOUT CAREFULLY READING AND UPDATING IT FIRST # Incorrectly configured parameters may cause damage. ###fluidd set ####======>Do not modify this configuration [virtual_sdcard] path: ~/gcode_files [display_status] [pause_resume] [gcode_macro PAUSE] description: Pause the actual running print rename_existing: PAUSE_BASE # change this if you need more or less extrusion variable_extrude: 1.0 gcode: ##### read E from pause macro ##### {% set E = printer["gcode_macro PAUSE"].extrude|float %} ##### set park positon for x and y ##### # default is your max posion from your printer.cfg {% set x_park = printer.toolhead.axis_maximum.x|float - 5.0 %} {% set y_park = printer.toolhead.axis_maximum.y|float - 5.0 %} ##### calculate save lift position ##### {% set max_z = printer.toolhead.axis_maximum.z|float %} {% set act_z = printer.toolhead.position.z|float %} {% if act_z < (max_z - 2.0) %} {% set z_safe = 2.0 %} {% else %} {% set z_safe = max_z - act_z %} {% endif %} ##### end of definitions ##### PAUSE_BASE G91 {% if printer.extruder.can_extrude|lower == 'true' %} G1 E-{E} F2100 {% else %} {action_respond_info("Extruder not hot enough")} {% endif %} {% if "xyz" in printer.toolhead.homed_axes %} G1 Z{z_safe} F900 G90 G1 X{x_park} Y{y_park} F6000 {% else %} {action_respond_info("Printer not homed")} {% endif %} [gcode_macro RESUME] description: Resume the actual running print rename_existing: RESUME_BASE gcode: ##### read E from pause macro ##### {% set E = printer["gcode_macro PAUSE"].extrude|float %} #### get VELOCITY parameter if specified #### {% if 'VELOCITY' in params|upper %} {% set get_params = ('VELOCITY=' + params.VELOCITY) %} {%else %} {% set get_params = "" %} {% endif %} ##### end of definitions ##### {% if printer.extruder.can_extrude|lower == 'true' %} G91 G1 E{E} F2100 {% else %} {action_respond_info("Extruder not hot enough")} {% endif %} RESUME_BASE {get_params} [gcode_macro CANCEL_PRINT] description: Cancel the actual running print rename_existing: CANCEL_PRINT_BASE gcode: TURN_OFF_HEATERS {% if "xyz" in printer.toolhead.homed_axes %} G91 G1 Z4.5 F300 G90 {% else %} {action_respond_info("Printer not homed")} {% endif %} G28 X Y {% set y_park = printer.toolhead.axis_maximum.y|float - 5.0 %} G1 Y{y_park} F2000 M84 CANCEL_PRINT_BASE [include timelapse.cfg] # [mcu rpi] # serial: /tmp/klipper_host_mcu # [adxl345] # cs_pin: rpi:None # spi_speed: 2000000 # spi_bus: spidev2.0 # [resonance_tester] # accel_chip: adxl345 # accel_per_hz: 70 # probe_points: # 117.5,117.5,10 [verify_heater extruder] check_gain_time: 200 hysteresis: 5 #####<======Do not modify this configuration #####======>Please configure according to different printer models [stepper_x] step_pin: PF0 dir_pin: PF1 enable_pin: !PD7 microsteps: 16 rotation_distance: 40 full_steps_per_rotation: 200 endstop_pin: ^PE5 position_endstop: 0 position_min: 0 position_max: 465 homing_speed: 80 homing_retract_dist: 5 [stepper_y] step_pin: PF6 dir_pin: !PF7 enable_pin: !PF2 microsteps: 16 rotation_distance: 40 full_steps_per_rotation: 200 endstop_pin: ^PJ1 position_endstop: 0 position_min: 0 position_max: 460 homing_speed: 80 homing_retract_dist: 5 [stepper_z] step_pin: PL3 dir_pin: !PL1 enable_pin: !PK0 microsteps: 16 rotation_distance: 8 full_steps_per_rotation: 200 endstop_pin: probe:z_virtual_endstop position_min: -10 position_max: 470 homing_speed: 4 second_homing_speed: 1 homing_retract_dist: 2.0 [extruder] max_extrude_only_distance: 1000.0 step_pin: PA4 dir_pin: PA6 enable_pin: !PA2 microsteps: 16 gear_ratio: 1:1 rotation_distance: 7.5 nozzle_diameter: 0.400 filament_diameter: 1.750 heater_pin: PB4 sensor_type: EPCOS 100K B57560G104F sensor_pin: PK5 #control: pid #pid_Kp: 15.28 #pid_Ki: 1.30 #pid_Kd: 44.75 min_temp: 0 max_temp: 300 pressure_advance: 0.05 # Calibrate pressure_advance_smooth_time: 0.04 [idle_timeout] timeout: 172800 [heater_bed] heater_pin: PH5 sensor_type: EPCOS 100K B57560G104F sensor_pin: PK6 #control = pid #pid_kp = 72.045 #pid_ki = 1.127 #pid_kd = 1150.925 min_temp: 0 max_temp: 120 [mcu] serial: /dev/serial/by-id/usb_serial_1 restart_method: command [printer] kinematics: cartesian max_velocity: 300 max_accel: 3500 # max_accel_to_decel: 7000 max_z_velocity: 10 square_corner_velocity: 5.0 max_z_accel: 1000 [filament_switch_sensor filament_sensor] pause_on_runout: True switch_pin: PE4 [input_shaper] #shaper_freq_x: 33.33 #shaper_freq_y: 22.86 shaper_type: mzv [fan] pin: PH6 [bltouch] sensor_pin: ^PD2 control_pin: PB5 x_offset: -31.8 # modify as needed for bltouch location y_offset: -40.5 # modify as needed for bltouch location z_offset: 3.6 # modify as needed for bltouch or run PROBE_CALIBRATE speed: 10 samples: 1 samples_result:average sample_retract_dist: 3.0 # Can be set lower, example 2.5 depending on height of bltouch from bed lift_speed: 40 probe_with_touch_mode: True stow_on_each_sample: false [safe_z_home] home_xy_position: 230, 230 speed: 120.0 z_hop: 10.0 z_hop_speed: 10.0 [bed_mesh] # enable for BLTouch probe_count = 7,7 algorithm = bicubic speed: 120 mesh_min: 30, 30 mesh_max: 430, 415 mesh_pps: 2, 2 horizontal_move_z: 5 fade_start: 1 fade_end: 10 fade_target: 0 # [heater_fan hotend_fan] # pin: PC0 # heater: extruder # heater_temp: 50.0 [bed_screws] # enable for bed screws screw1: 40, 40 screw2: 420, 40 screw3: 420, 420 screw4: 40, 420 #*# <---------------------- SAVE_CONFIG ----------------------> #*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated. #*# #*# [extruder] #*# control = pid #*# pid_kp = 18.614 #*# pid_ki = 0.962 #*# pid_kd = 90.047 #*# #*# [heater_bed] #*# control = pid #*# pid_kp = 70.936 #*# pid_ki = 0.989 #*# pid_kd = 1271.524 #*# #*# [bed_mesh default] #*# version = 1 #*# points = #*# 0.465000, 0.427500, 0.357500, 0.237500, 0.202500, 0.250000, 0.255000 #*# 0.342500, 0.267500, 0.182500, 0.070000, 0.112500, 0.082500, 0.075000 #*# 0.327500, 0.202500, 0.062500, 0.002500, -0.085000, -0.032500, 0.037500 #*# 0.217500, 0.075000, -0.030000, -0.085000, -0.115000, -0.122500, -0.087500 #*# 0.215000, 0.155000, 0.067500, -0.025000, -0.035000, -0.005000, 0.002500 #*# 0.292500, 0.142500, 0.145000, 0.125000, 0.120000, 0.230000, 0.235000 #*# 0.220000, 0.182500, 0.177500, 0.192500, 0.265000, 0.322500, 0.435000 #*# tension = 0.2 #*# min_x = 29.999999999999996 #*# algo = bicubic #*# y_count = 7 #*# mesh_y_pps = 2 #*# min_y = 30.0 #*# x_count = 7 #*# max_y = 414.96 #*# mesh_x_pps = 2 #*# max_x = 429.96 #*# #*# [bltouch] #*# z_offset = 3.600 #*# #*# [input_shaper] #*# shaper_type_x = mzv #*# shaper_freq_x = 49.2 #*# shaper_type_y = mzv #*# shaper_freq_y = 28.8.thumb.jpg.c2126493c9b271706c8a1a7403605925.jpg)
.thumb.jpg.82d4ceea8e468158820646e964f48827.jpg)
.thumb.jpg.31683ca9a0c249061284f36844bd8e81.jpg)
.thumb.jpg.74a15fe03e3da394c2e8ebda47afac43.jpg)
.thumb.jpg.fe864c2751a1613b3d4dc237b604304a.jpg)
.thumb.jpg.3bde0eb7172541719b9f16fa67890c7e.jpg)
.thumb.jpg.ccb371d101ff16c677f10abb54c382d6.jpg)
.thumb.jpg.ad117737225607cffa54b9f2528e1827.jpg)
.thumb.jpg.23f659105a043be0ca3ac912dec91b4d.jpg)
.thumb.jpg.3137e43d7b5ca298ae9037eb948ad1c2.jpg)
.jpg.4a16cd79d882053581aa38c887771aa9.jpg)
.jpg.9ce1803c42f3e9454c8c0df00477f011.jpg)
.jpg.13db51b206dcac274e57592f6af38d20.jpg)
.jpg.974d747baf5b094e982e2f43991af6a9.jpg)
.jpg.742c5ebd2624c229e600e2b378708909.jpg)
.jpg.ca9cefd427b5d0e7b4cb4f4efc80ce93.jpg)
.jpg.fb23f3a70387a107b390f05b537f2f4e.jpg)
.jpg.b7b715313d39721f9ad9ca42d5e86da1.jpg)
.jpg.658f42275c84b031bd2a10a4d8c7bdb8.jpg)
.jpg.284a88f546cd57cf0af7ec78c8eb7d6e.jpg)