Chercher dans la communauté
Résultats des étiquettes.
-
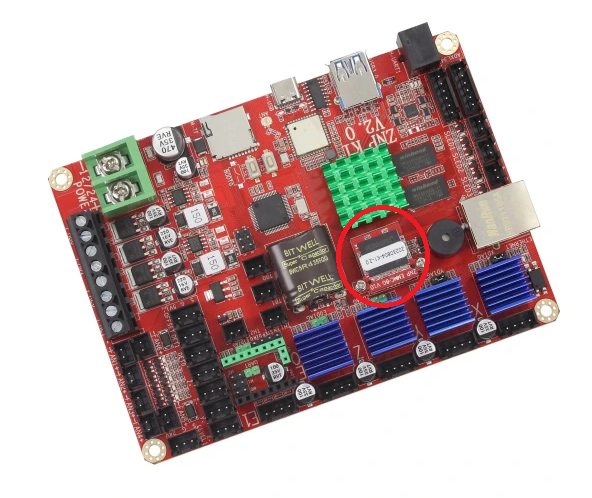
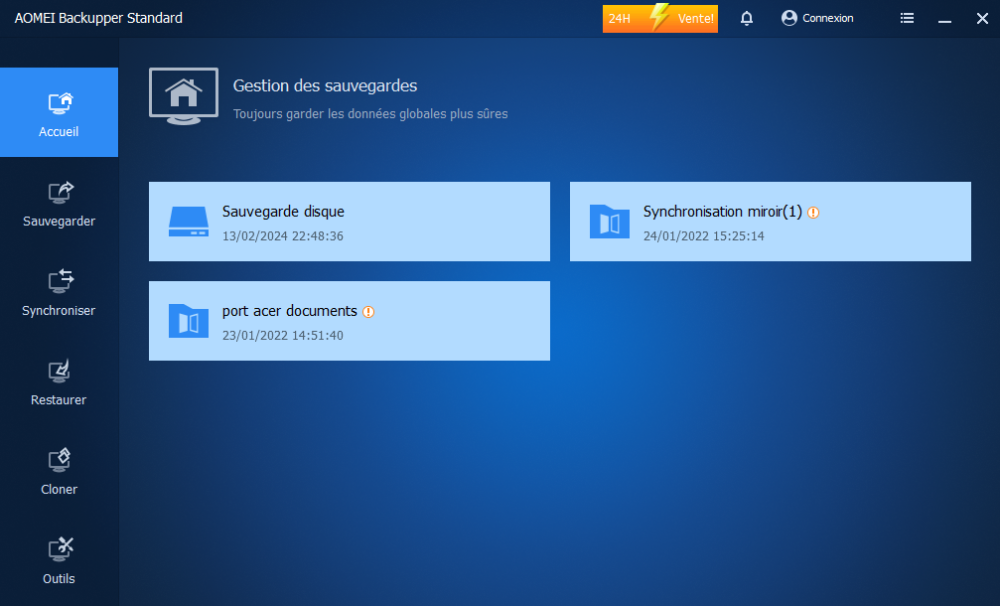
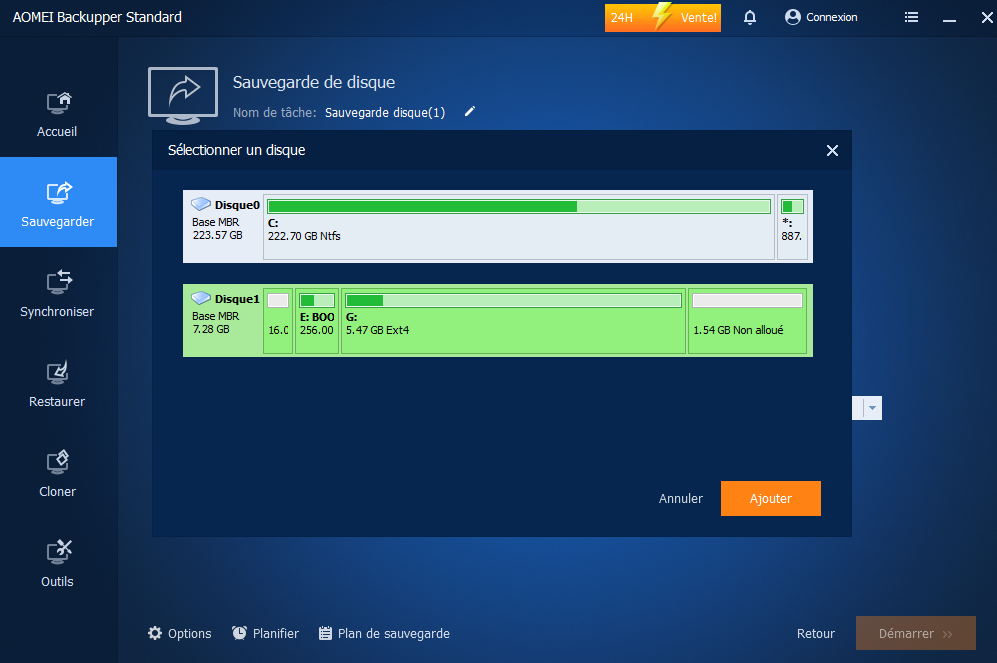
Votre machine fonctionne très bien après moultes réglages et essais, et là c’est le drame, une panne, un problème, une mauvaise manipulation survient et Il n’y a rien de plus rageant que de s’apercevoir qu’il faut repartir de zéro. De nombreuses imprimantes sous Klipper ont leur OS (linux) stocké sur une carte mémoire EMMC généralement de 8 Go, Je vais vous décrire dans le détail la procédure pour effectuer une sauvegarde et la restaurer sur PC Windows avec le logiciel AOMEI Backupper, si vous avez des logiciels similaires sur Mac ou Linux merci de le signaler. Avant toute chose vous devez vous munir d’un adaptateur EMMC/USB Il existe un autre adaptateur EMMC/microSD mais personnellement celui que j’avais ne fonctionnait pas très bien Vous aurez besoin du logiciel AOMEI Backup Standard Edition (c’est la version gratuite) que vous trouverez ici https://www.aomei.fr/backup-software/ab-standard.html Comme exemple je vais prendre la Elegoo Neptune 4 Plus voici sa carte mère et entouré de rouge l’EMMC qui est fixé par 2 vis cruciforme Pour y accéder, vous allez devoir démonter le carter se trouvant sous l’imprimante, on intervient bien sûr sur une machine débranchée il y a de nombreuses vis, Elegoo n’a pas lésiné sur la quantité, attention certaines vis sont plus courtes que les autres, repérez les afin de les remettre au mêmes endroits. Sur ce carter il y a le ventilo de refroidissement de la carte mère, il va falloir le débrancher précautionneusement (ne pas tirer sur le fil comme un bourrin ). On dévisse les 2 vis fixant EMMC attention de ne pas les faires tomber, elles sont très dur à retrouver et si elles restent sur la carte mère ça peut amener un court-circuit. On démonte l’EMMC et on le branche sur l’adaptateur USB, puis sur le PC. Vous allez alors avoir 2 messages d’alerte disant que vous devez formater votre disque et un autre de ce type ci-dessous, surtout ne formater pas ce disque. Il est normal d’avoir ces messages car la partition (BOOT) est lisible par Windows contrairement à la deuxième qui est lisible uniquement par Linux. Lancez maintenant AOMEI Backup Standard Edition Cliquez sur sauvegarder (menu de gauche) Puis Sauvegarde de disque Et Ajouter un disque Sélectionnez votre EMMC (ça n’est bien sûr pas le disque c : que vous allez sélectionner) => Ajouter Sélectionnez l’endroit ou vous allez enregistrer votre sauvegarde Cliquez sur démarrer pour lancer la sauvegarde Une fois terminé vous pouvez remonter votre EMMC et votre imprimante, votre sauvegarde sera maintenant disponible en cas de problème. Maintenant, vous avez un problème et vous voulez restaurer votre sauvegarde, vous démontez et branchez sur votre PC votre EMMC comme précédemment expliqué, une fois AOMEI Backup Standard Edition lancé Cliquez sur Restaurer => Choisir un fichier image Vous sélectionnez le fichier image de votre sauvegarde Laissez coché la case Restaurer le disque entier Sectionner la sauvegarde Cliquez sur suivant Sélectionnez le disque EMMC ou vous voulez faire la restauration (ça n’est bien sûr pas le disque C : que vous allez sélectionner) Et vous lancez la restauration Une fois terminé vous pouvez remonter votre EMMC et votre imprimante et retrouver votre machine en état de marche Voilà si vous avez des questions, des critiques ou des corrections n'hésitez pas à intervenir




-

Changer de firmware (de Marlin à Klipper)
fran6p a posté un sujet dans Tutoriels et améliorations pour Creality
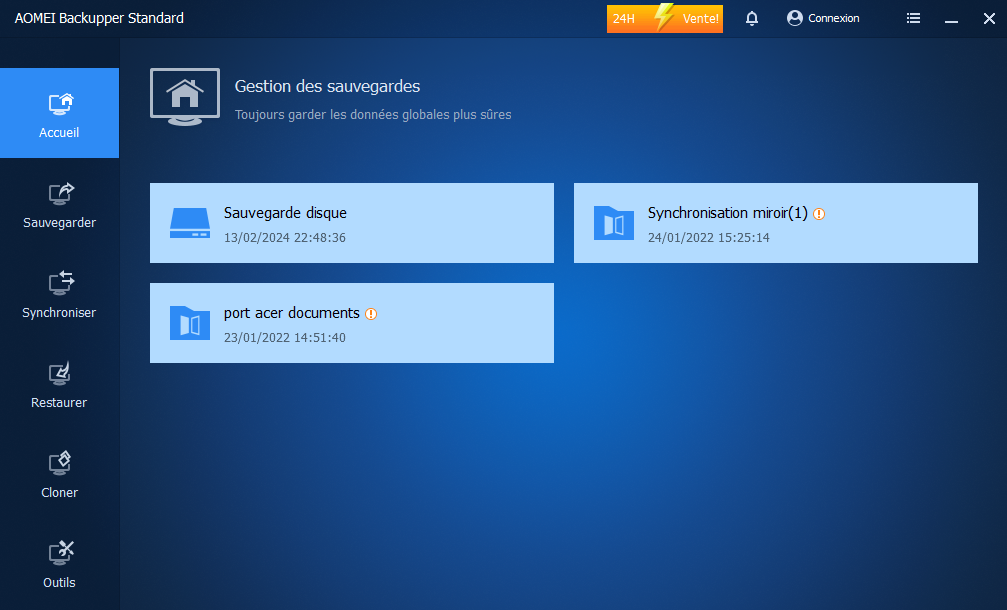
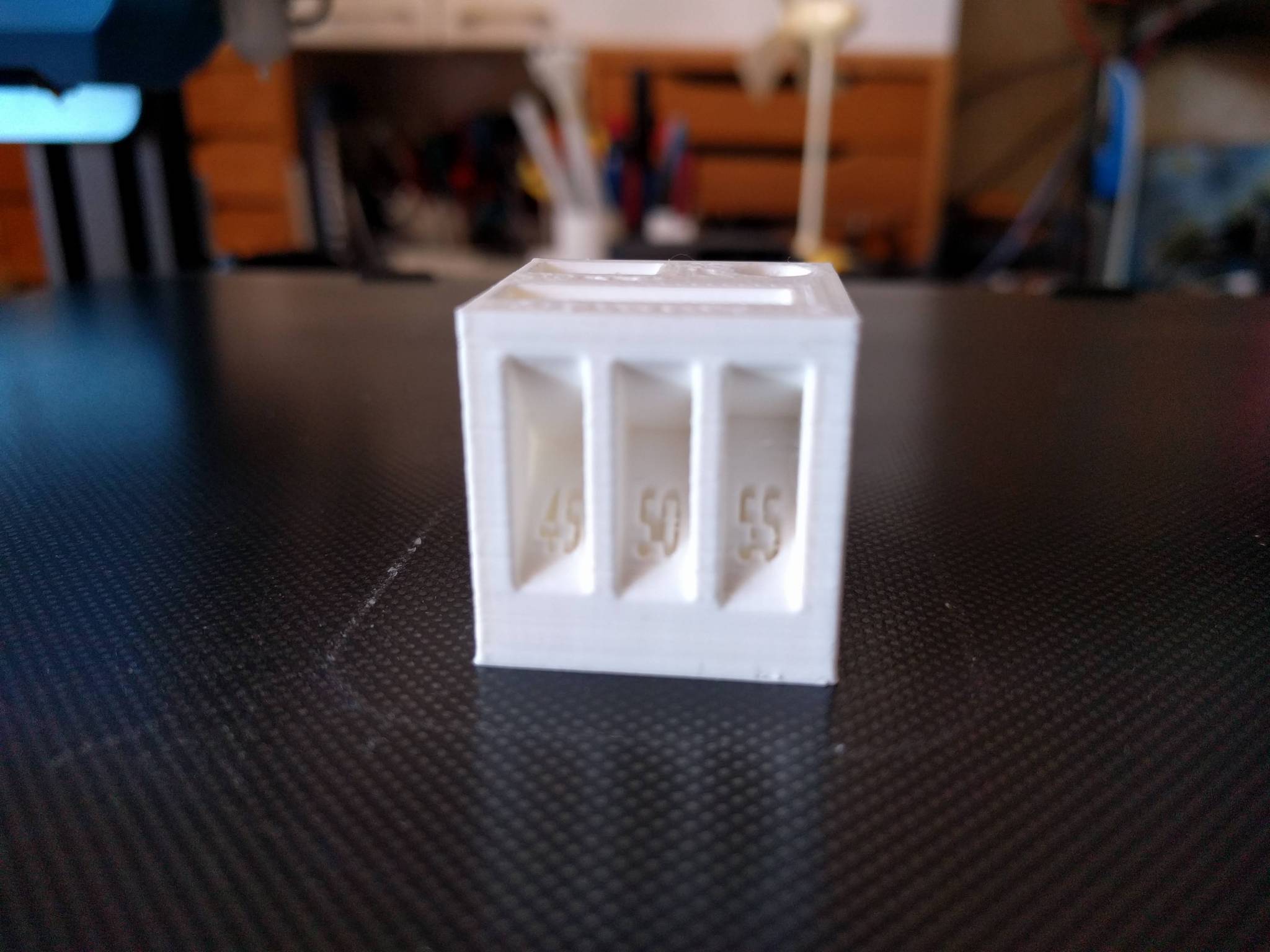
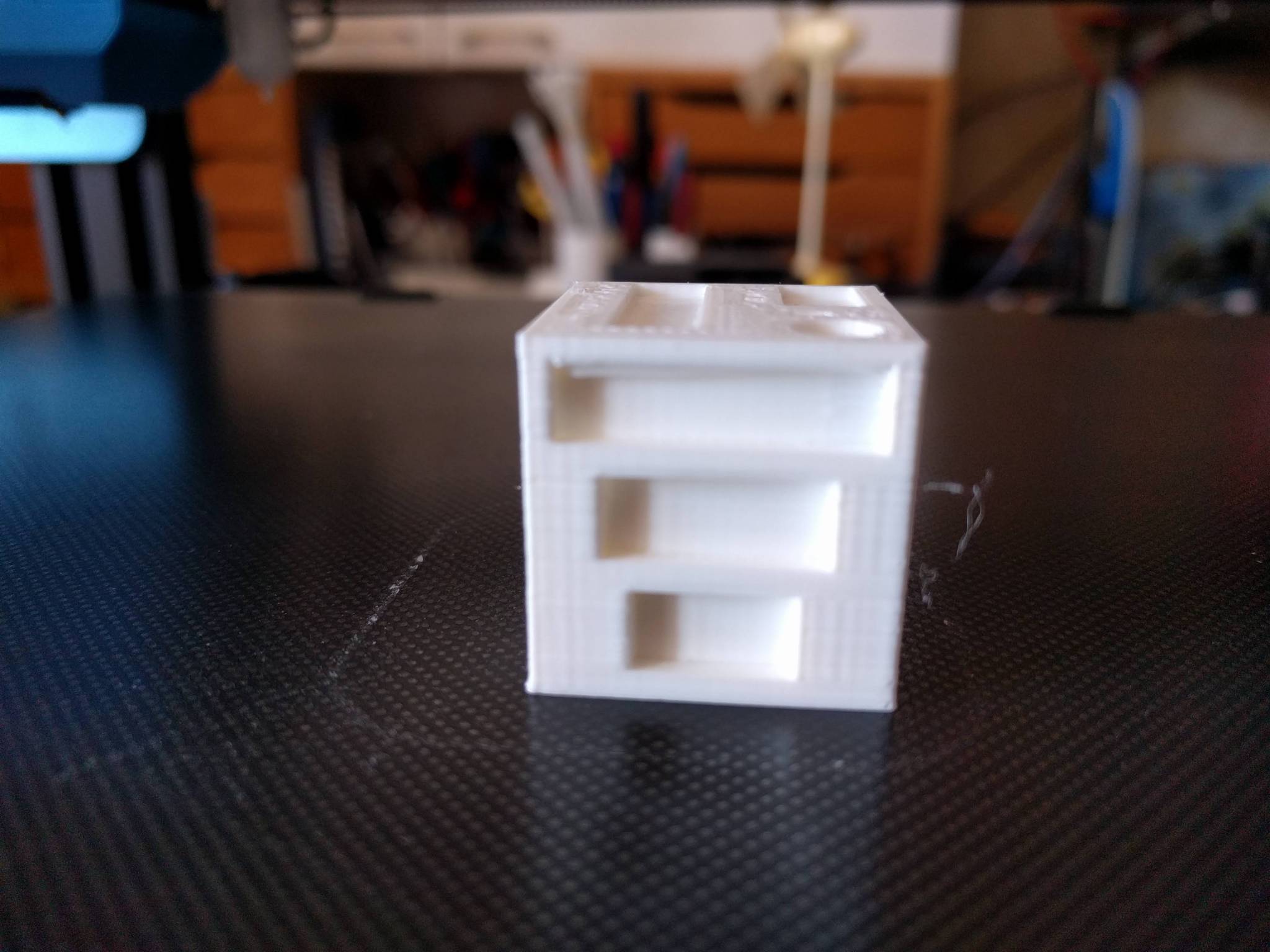
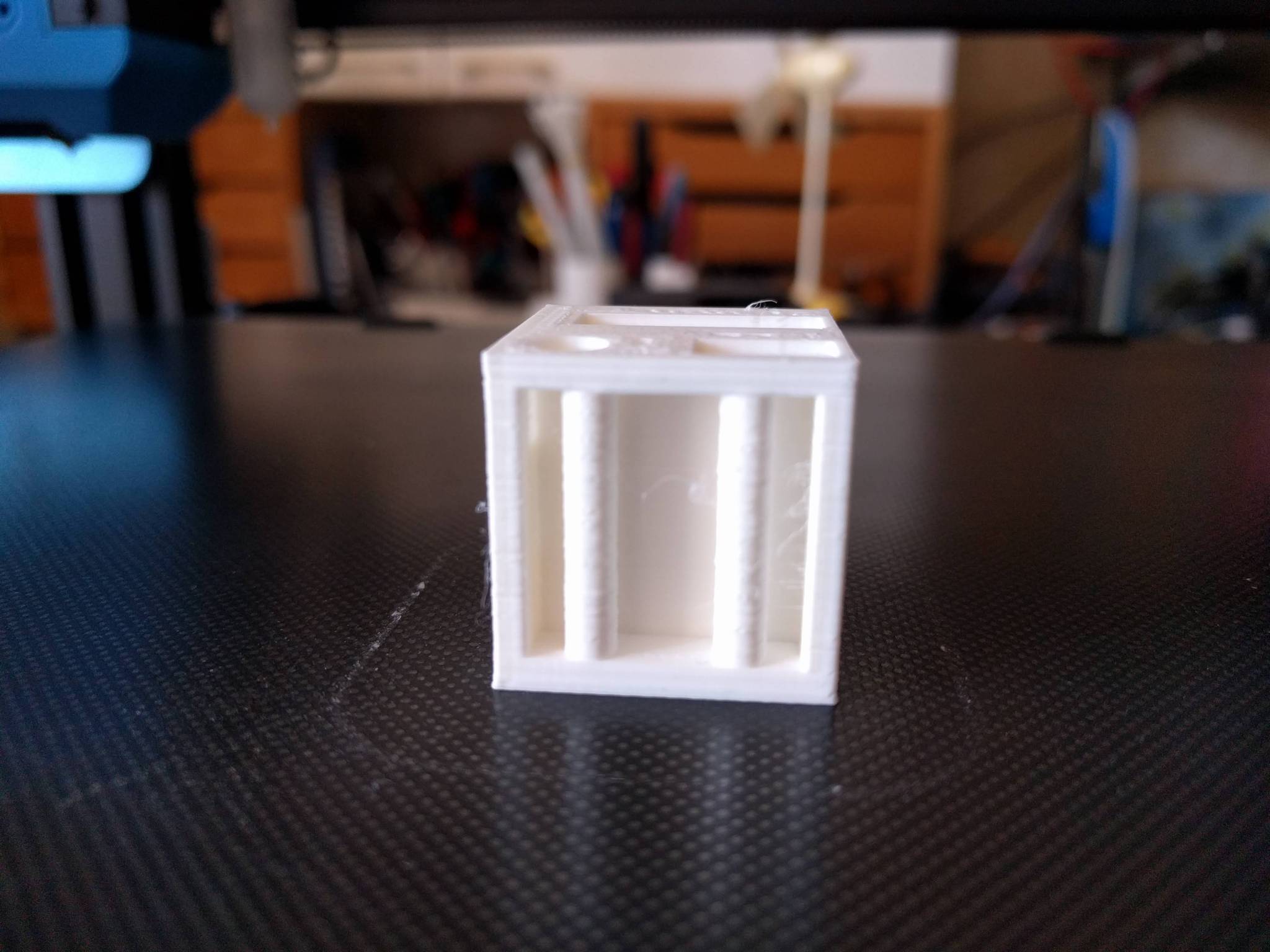
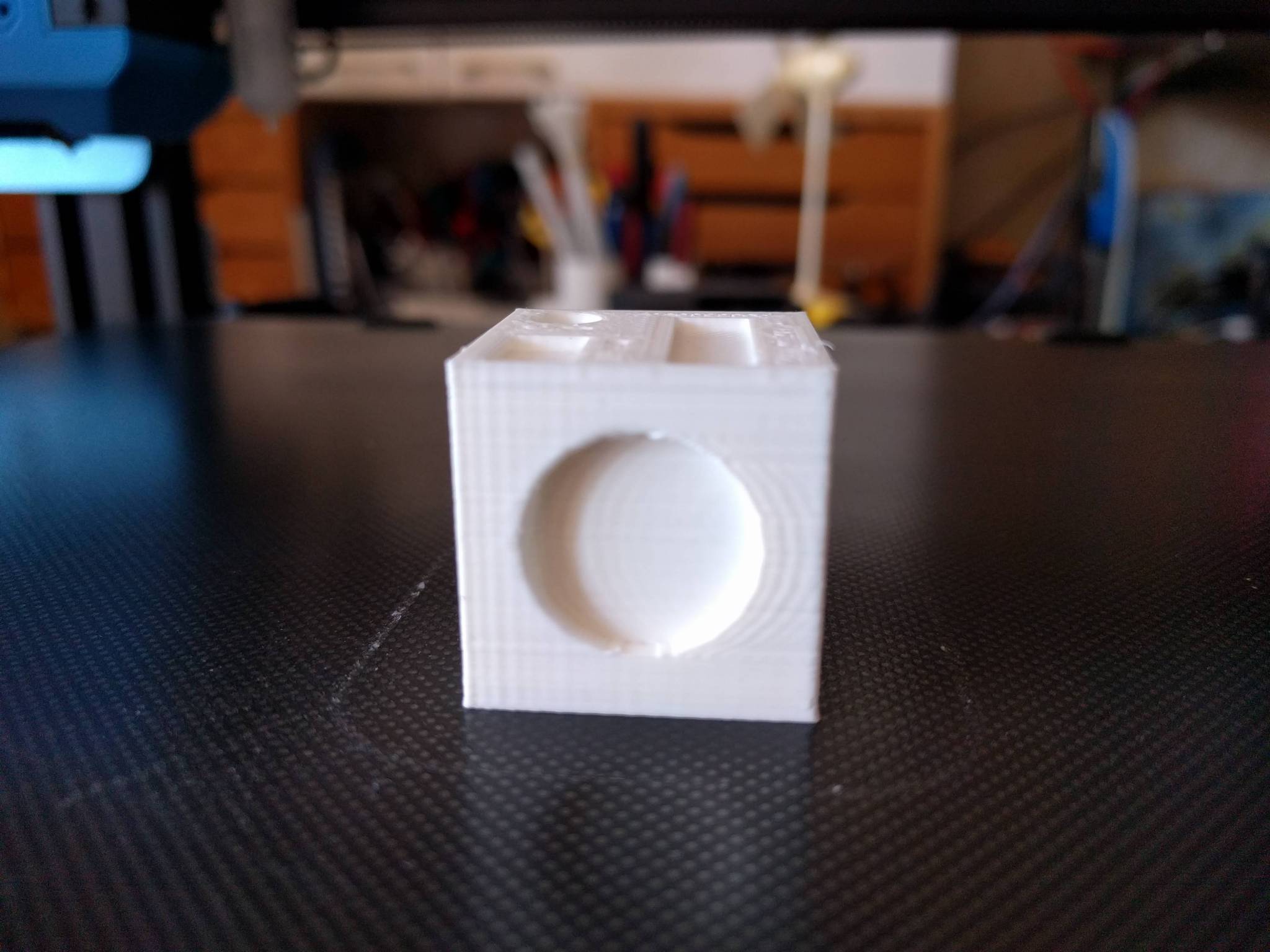
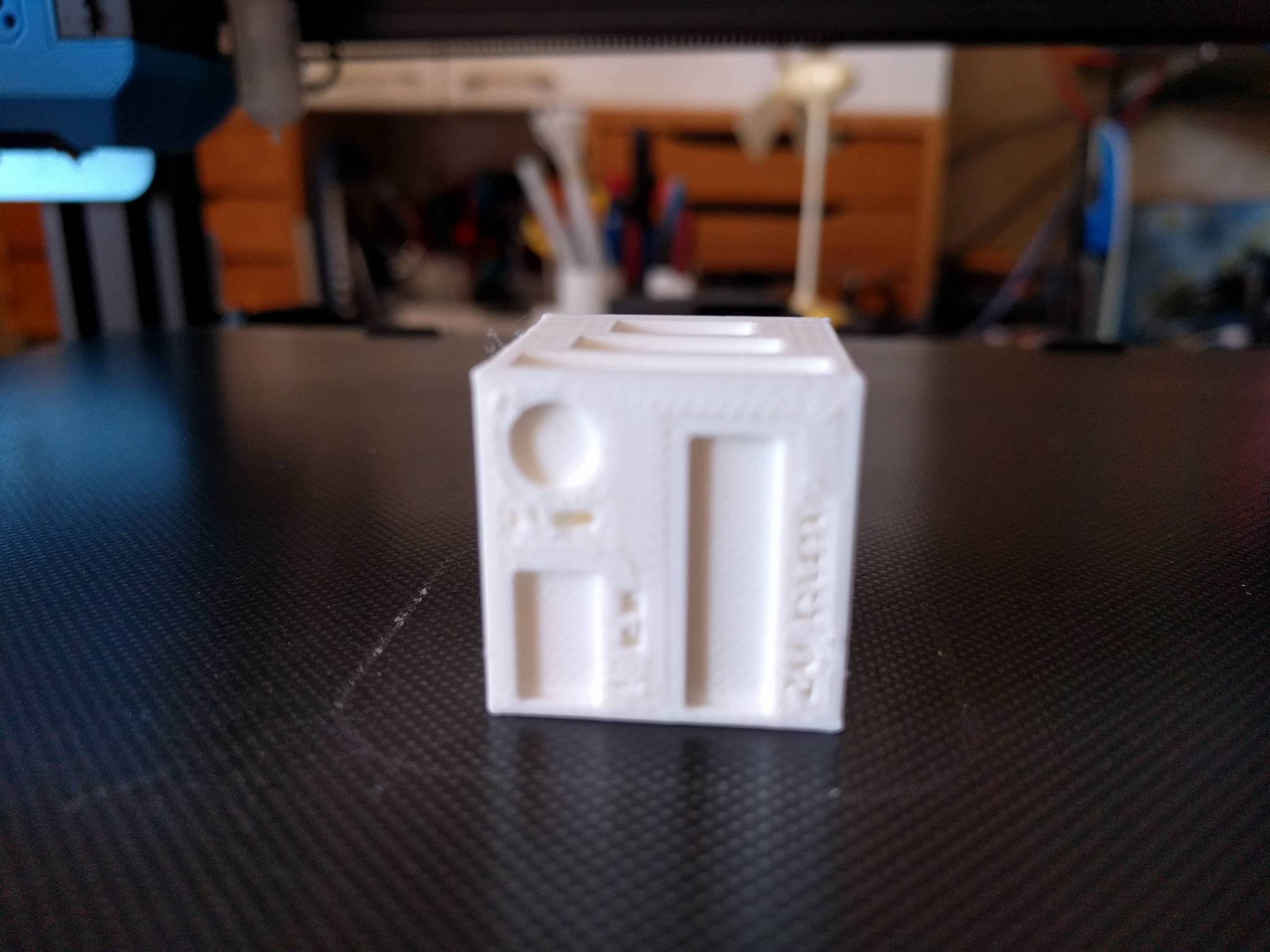
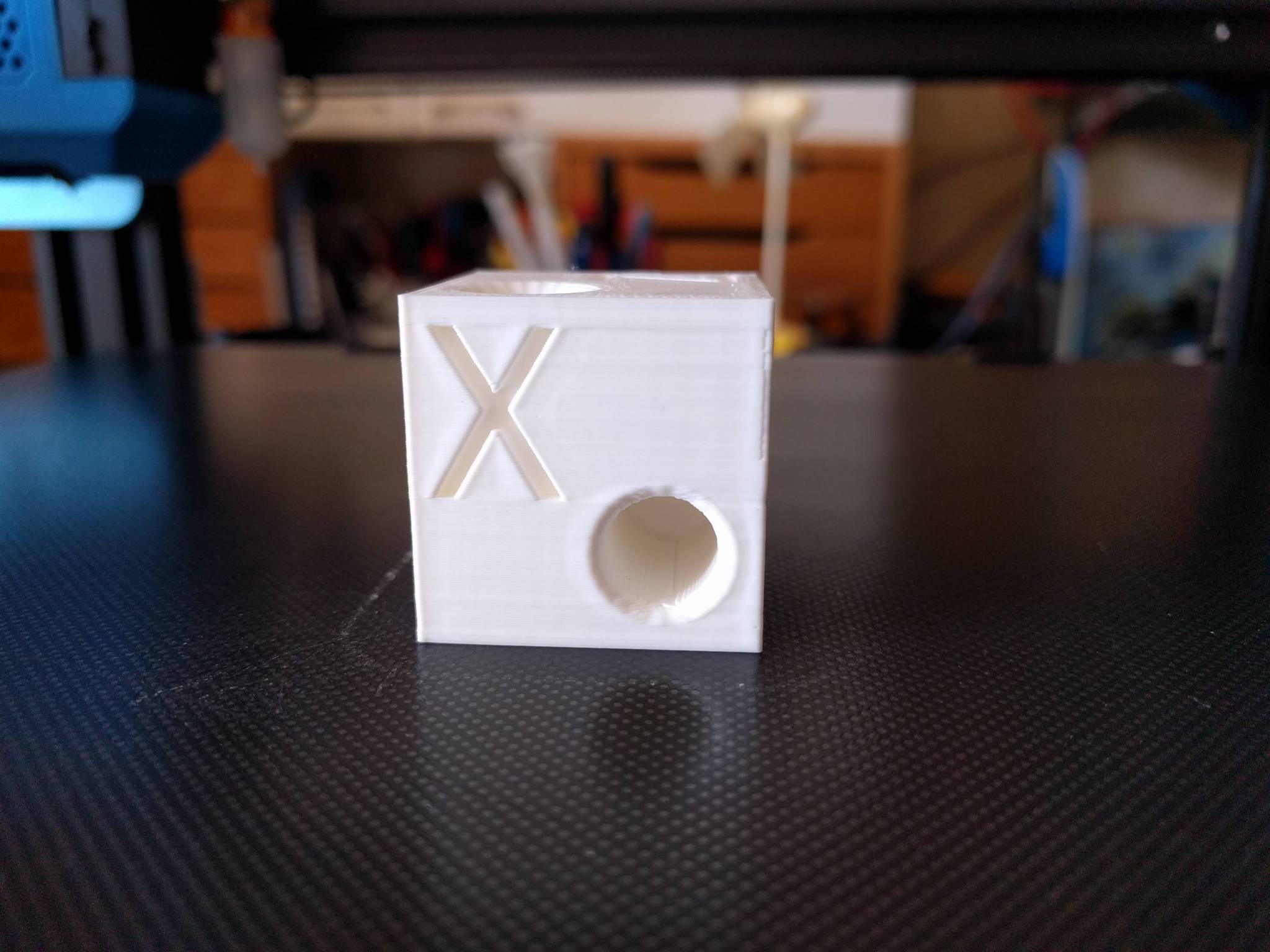
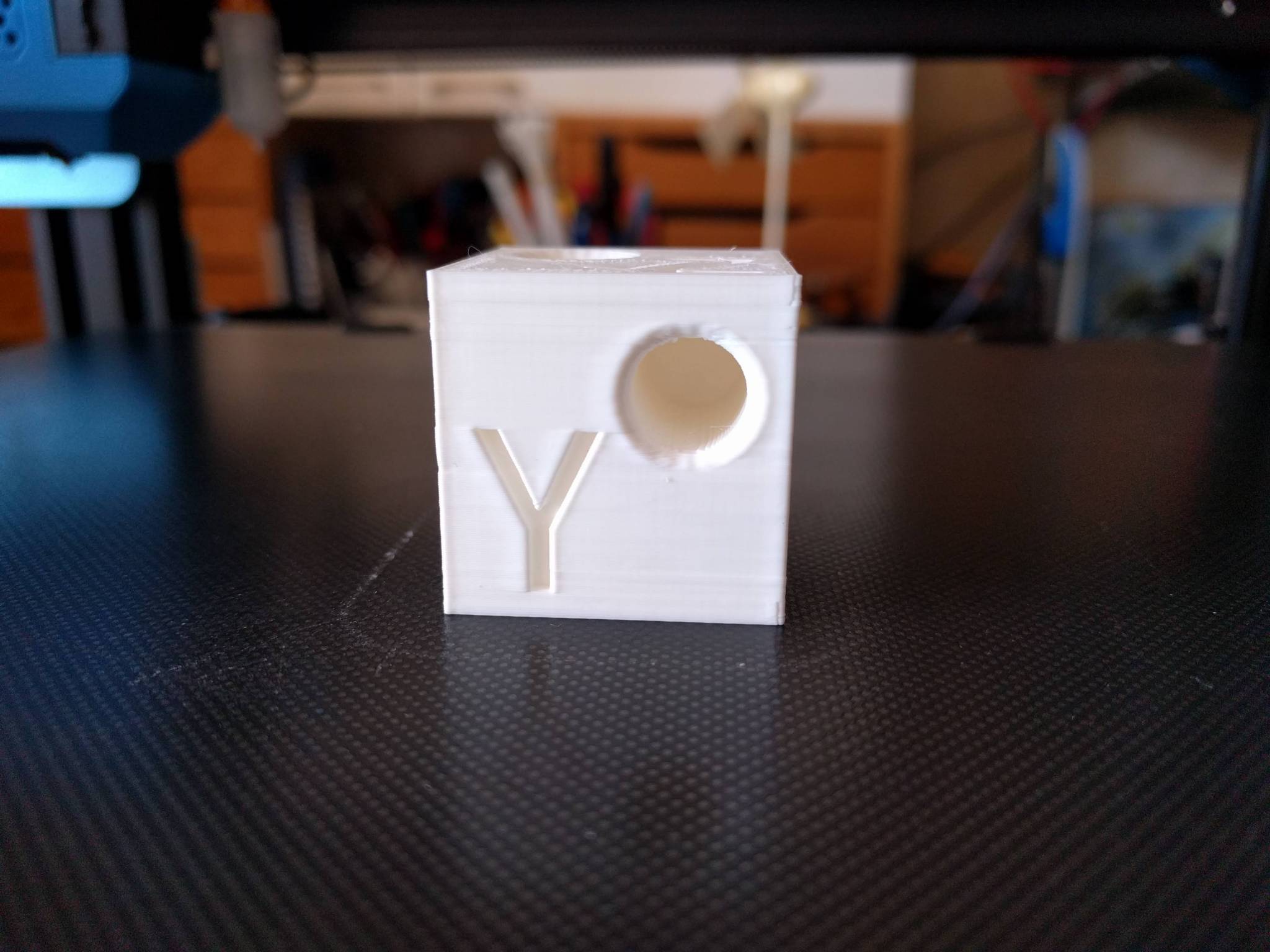
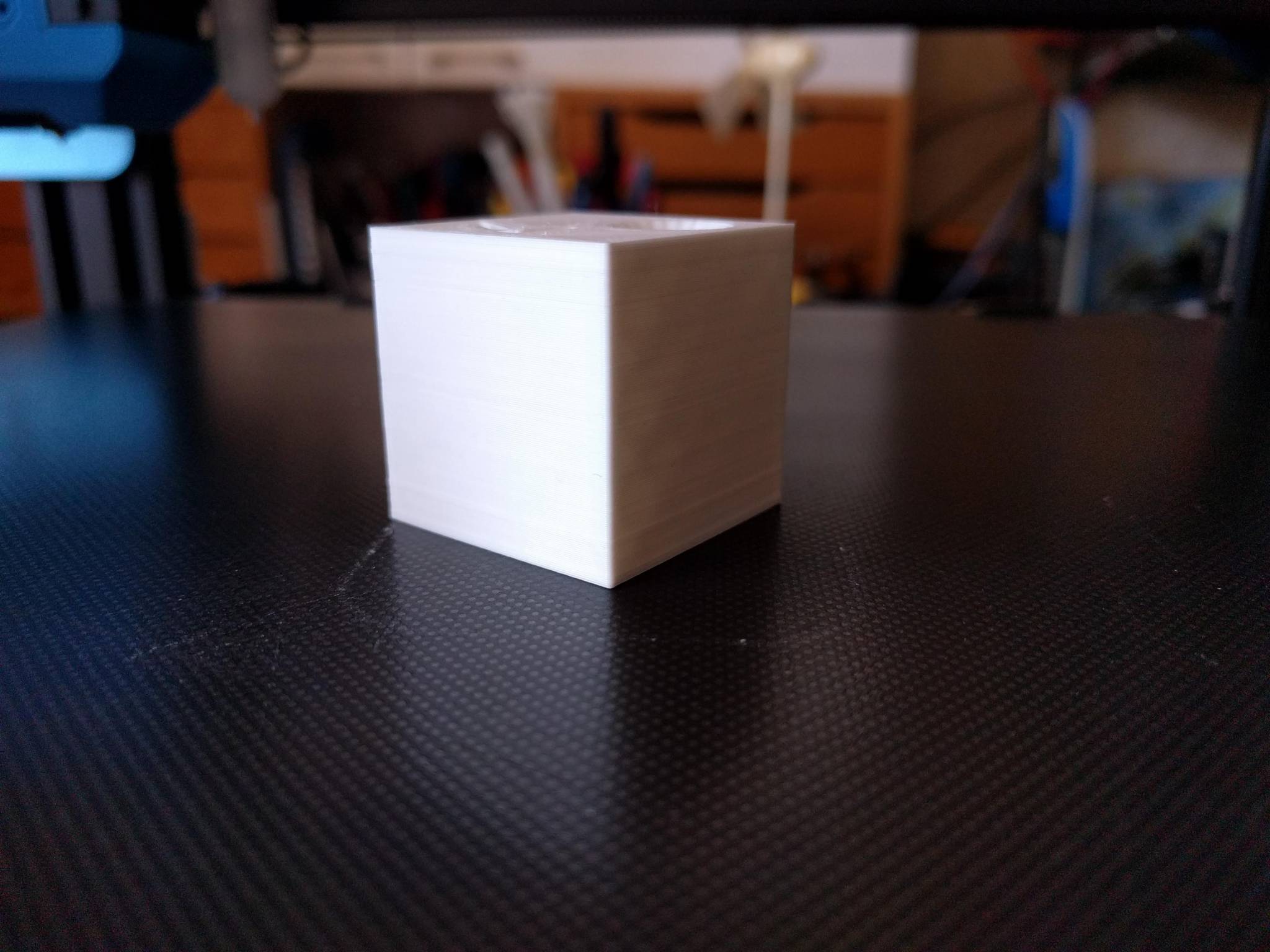
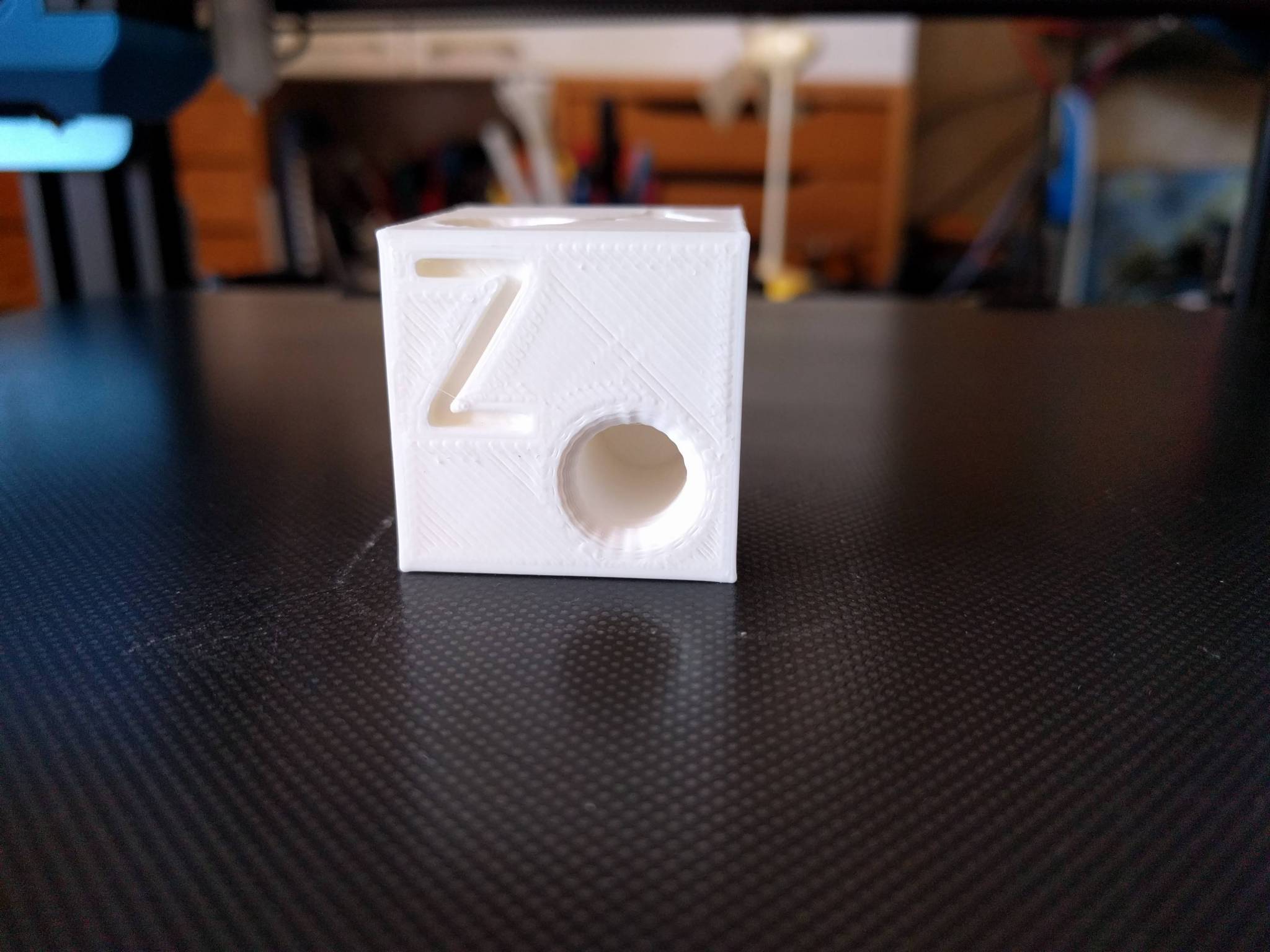
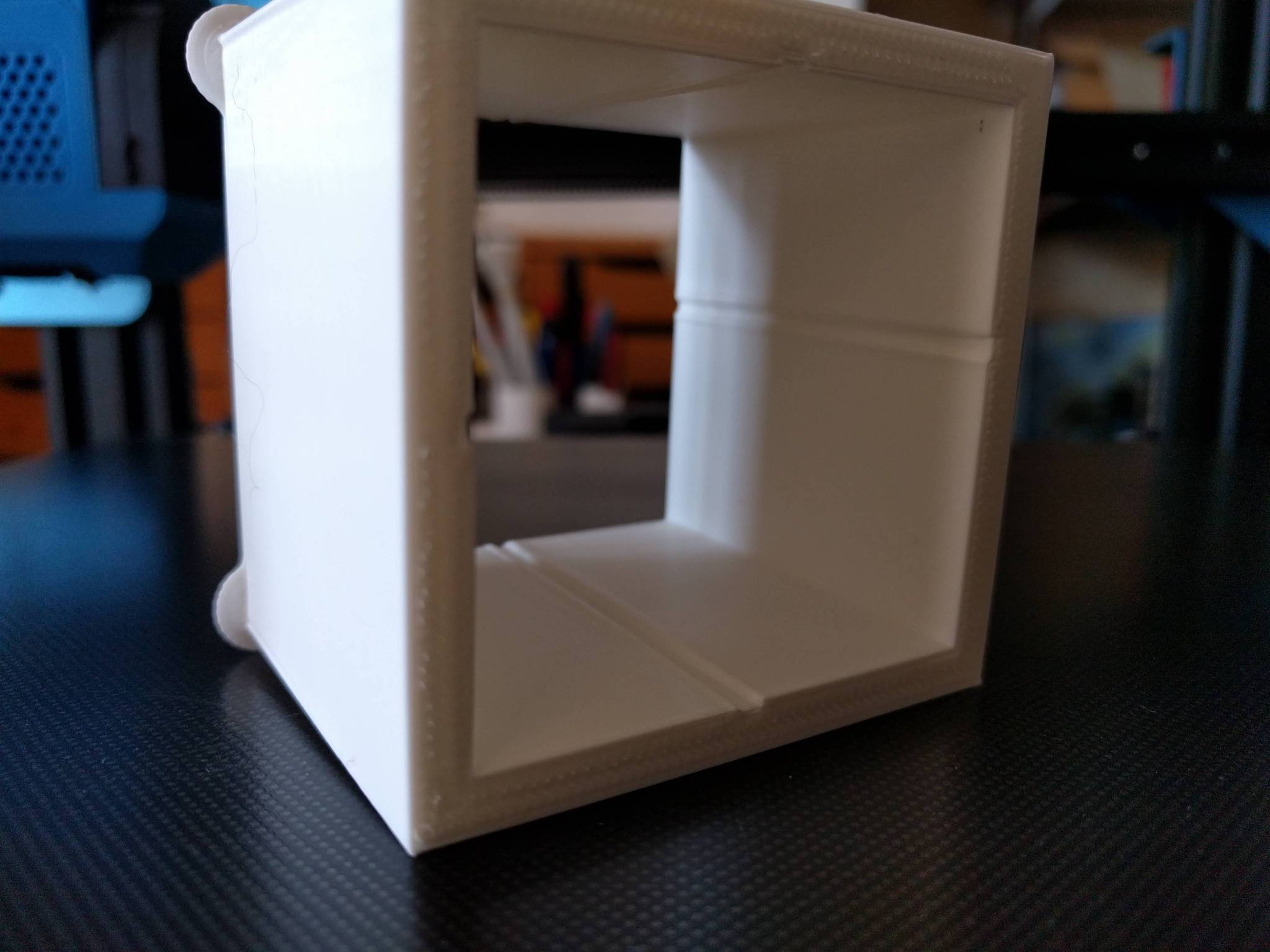
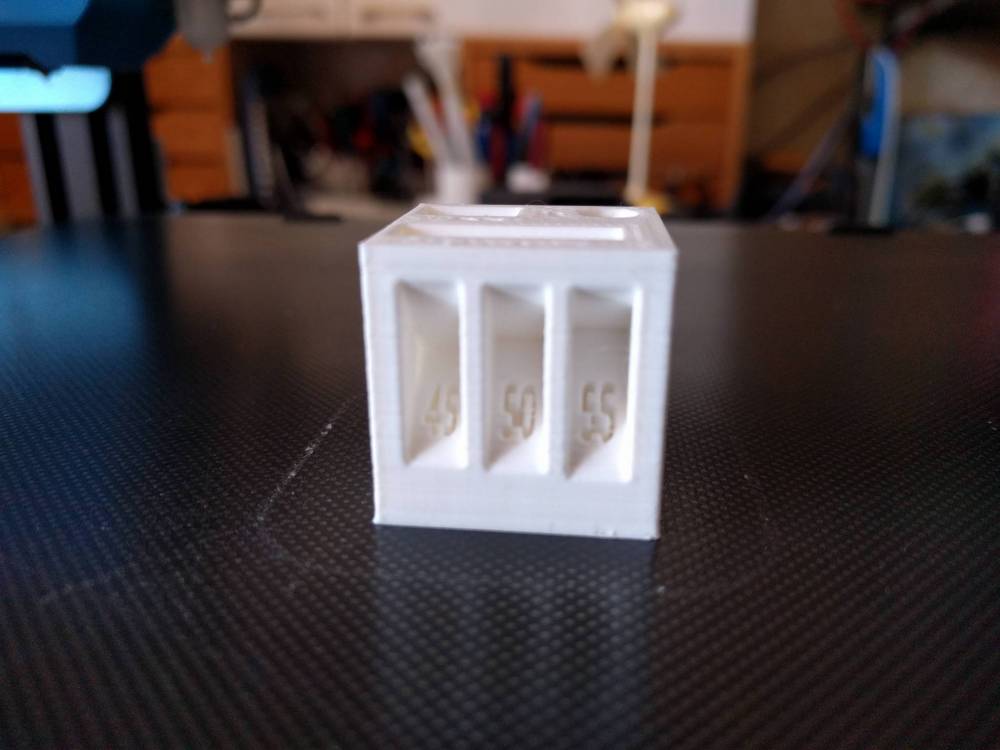
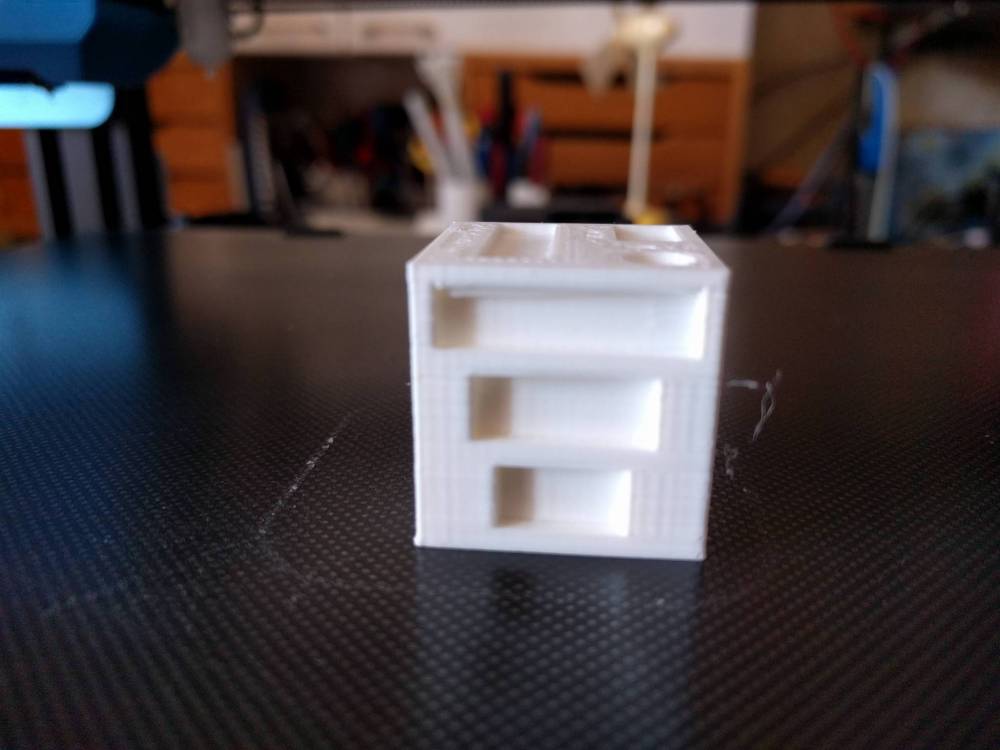
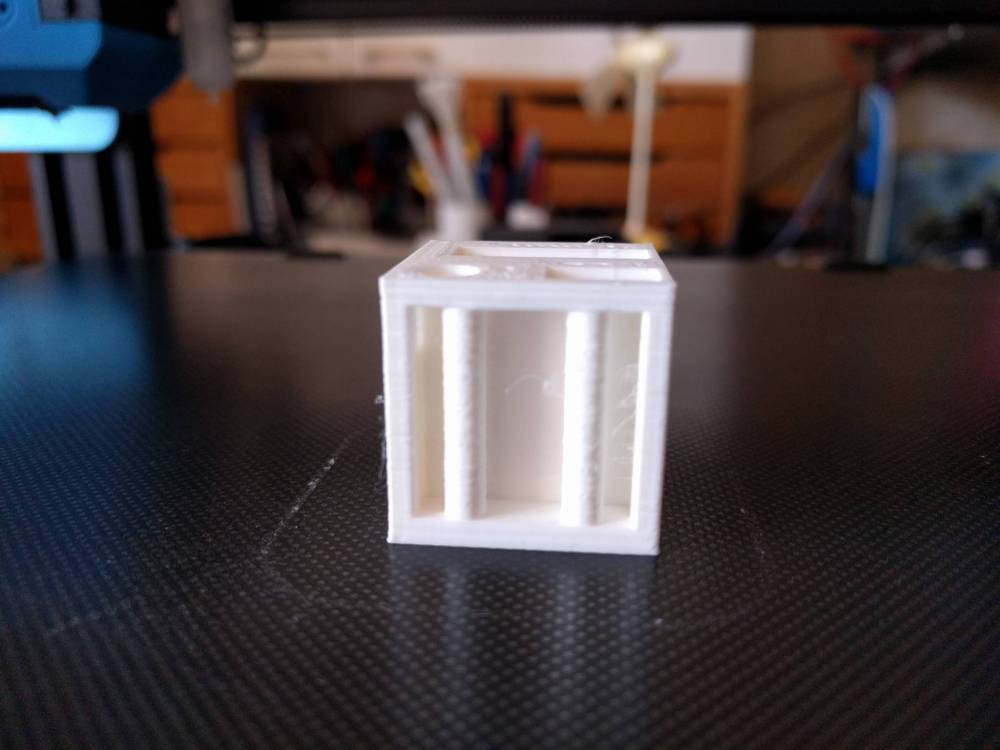
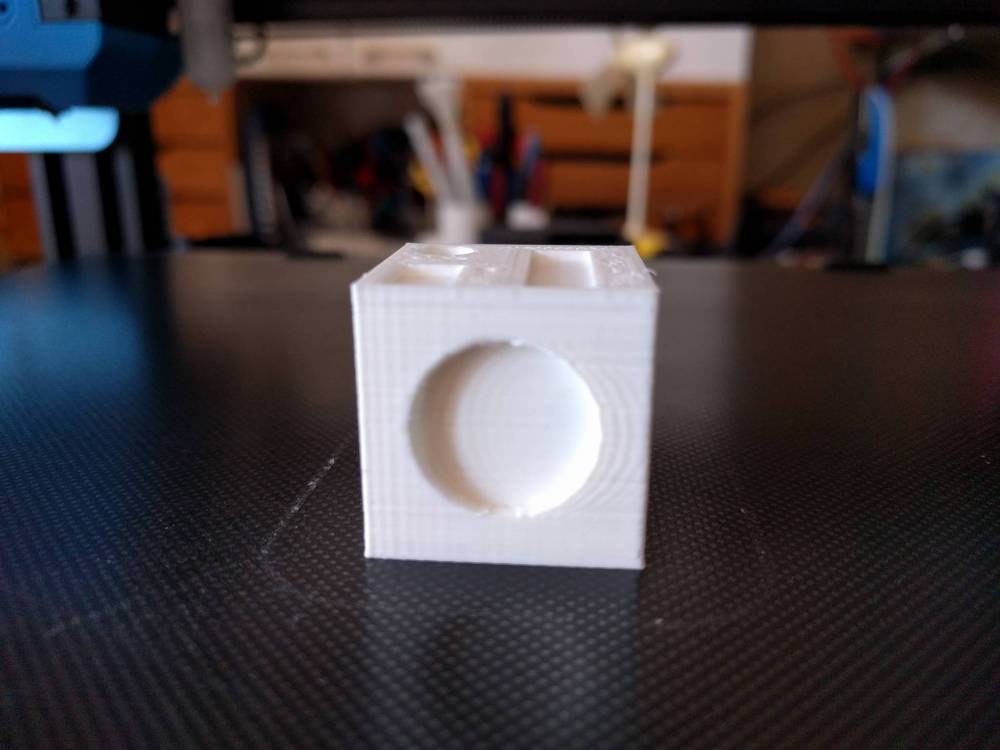
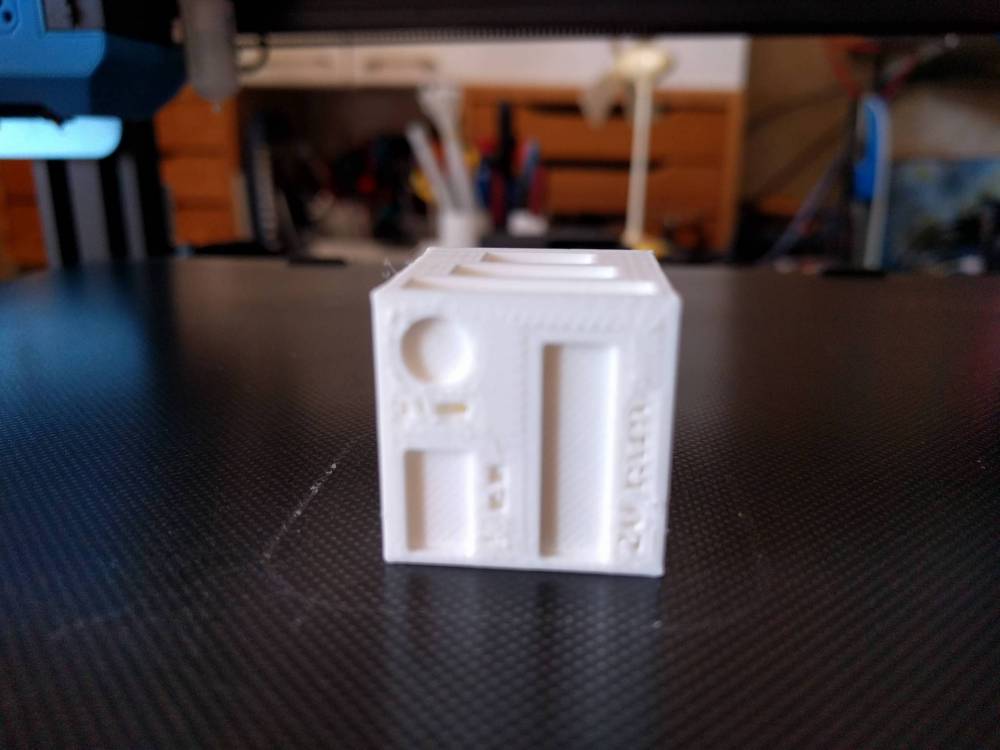
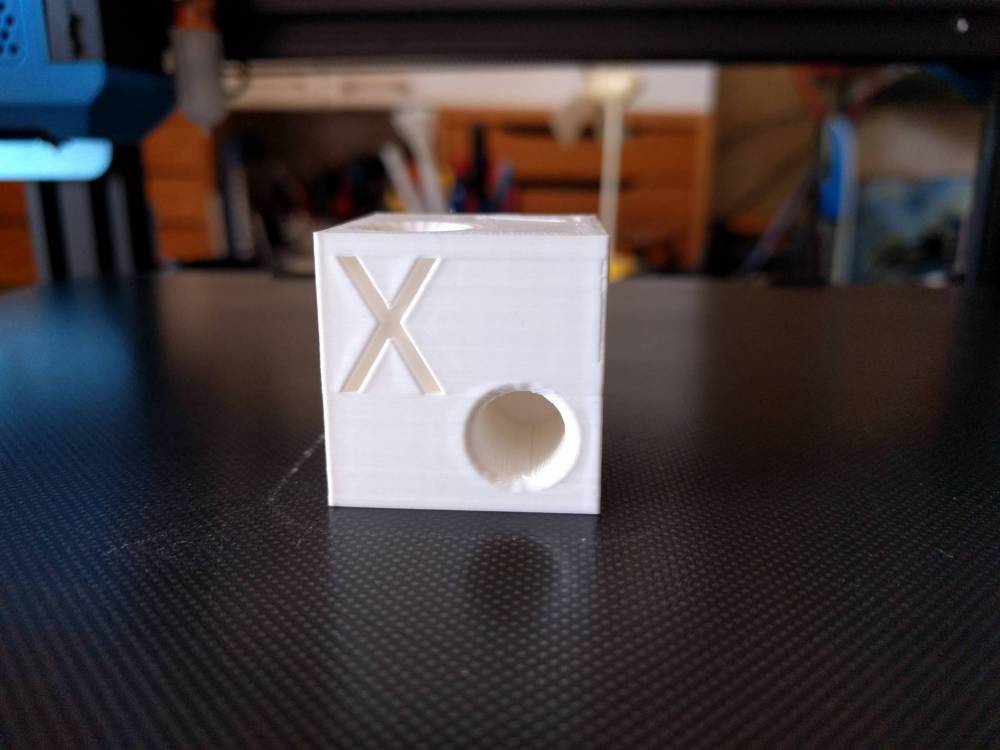
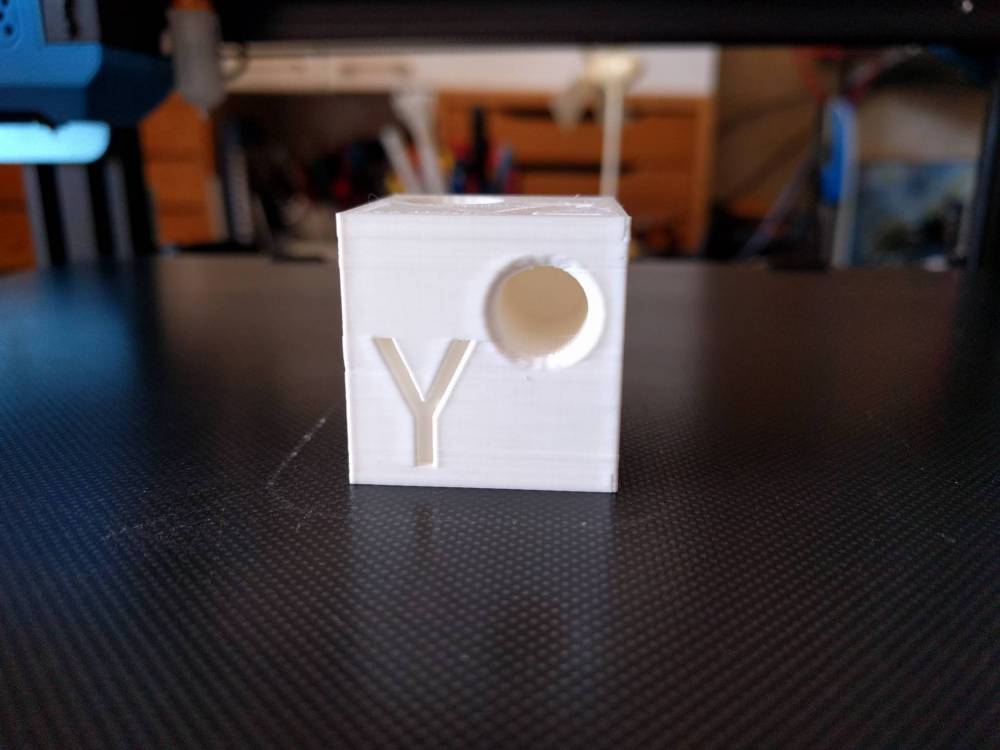
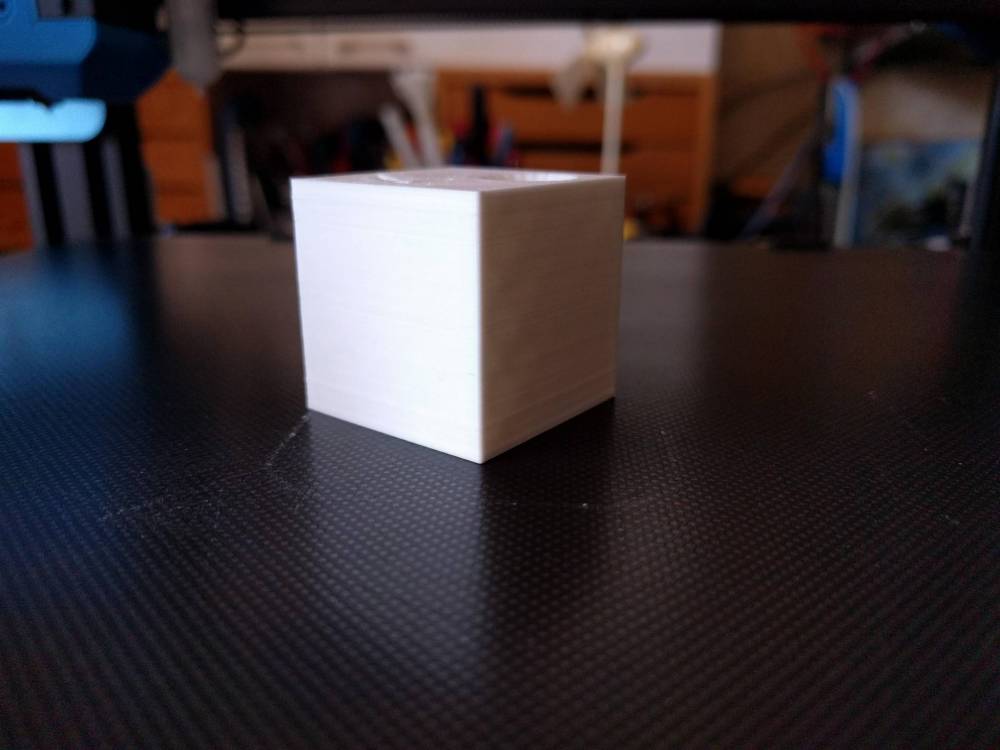
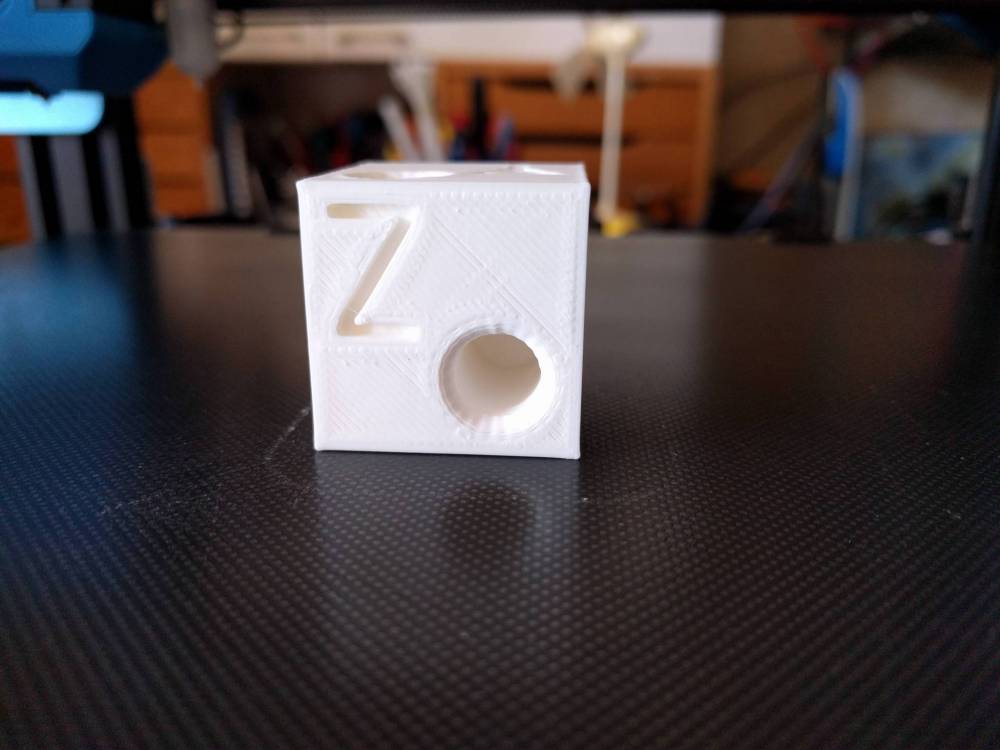
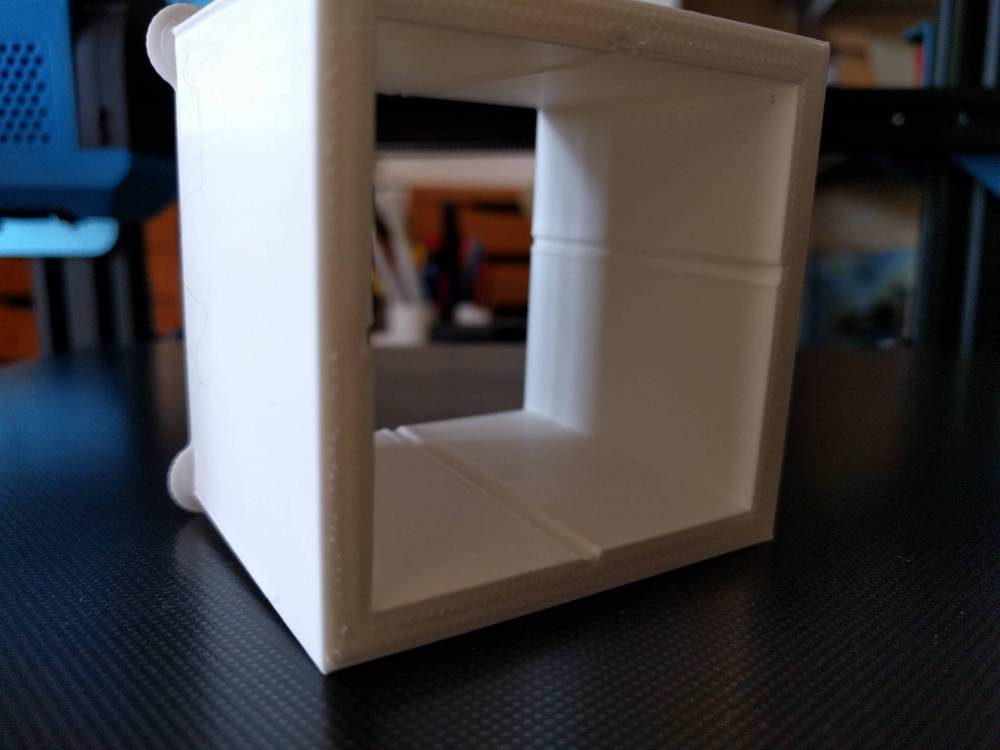
Ayant rencontré quelques difficultés d’impression avec des pièces cylindriques sur ma CR10V2 récemment mise à jour avec un bon et beau Marlin 2.0.5.3 dont j’avais fait part dans ce post : La remarque de @Tircown quant au firmware Klipper m’a «provoqué». Aimant les défis, particulièrement quand ils sont liés à l’informatique, l’électronique et la bidouille en général, j’ai sauté le pas. Je vais donc relater mon expérience, en renvoyant vers les liens qui m’ont été utiles et en fournissant évidemment les fichiers de configuration de ma CR10-V2 (pour les pressés, aller directement à la fin du post pour y trouver ceux-ci). Étape préliminaire Étant de la vieille école, je préfère de loin une bonne documentation format écrit fusse-t’elle en anglais plutôt que des vidéos pour me plonger dans un sujet nouveau. Le créateur du firmware Klipper, justement, a bien fait les choses, de nombreuses heures de lecture sont à prévoir (en ligne ou après récupération de l’archive compressée) : https://github.com/KevinOConnor/klipper Un utilisateur du forum, @Nibb31 a réalisé un excellent tutoriel (en français évidemment) qui explique tout : Tout ce que vous avez toujours voulu savoir sur Klipper sans jamais oser le demander Un autre site dont je me suis fortement servi : https://klipper.info/ Après lecture assidue des documents des liens précédents, je peux alors me lancer, d’autant plus que j’ai tout le matériel nécessaire (imprimantes, raspberry pi, cerveau et couteau). Première étape, installation de Klipper Octoprint étant déjà installé et fonctionnel, je m’y connecte via SSH (utilisateur : pi, mdp : cestmonsecret ou raspberry si vous ne l’avez pas modifié (c’est pas bien de ne pas le faire)). On récupère Klipper : git clone https://github.com/KevinOConnor/klipper ./klipper/scripts/install-octopi.sh Ces deux lignes, télécharge Klipper (git), installe les dépendances indispensables, prépare Klipper pour qu’il démarre automatiquement à l’allumage de la framboise et démarre celui-ci sous forme d’un service (le script «install-octopi.sh»est un fichier texte contenant les lignes de commandes). On construit puis flashe le microcontrôleur : cd ~/klipper/ make menuconfig Choix du microcontrôleur de la carte : Atmega2560 pour la CR10-V2, puis on lance la «compilation» : make On vérifie sur quel port la carte est connectée en USB : ls /dev/serial/by-id/* Le résultat affiche un lien symbolique /dev/serial/by-id/usb-1a86_USB-Serial-if00-port0 vers le périphérique physique (chez moi /dev/ttyUSB0). pi@octopi:~ $ ls -l /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 lrwxrwxrwx 1 root root 13 May 18 12:56 /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 -> ../../ttyUSB0 Il ne reste plus qu’à flasher le firmware : sudo service klipper stop make flash FLASH_DEVICE=/dev/serial/by-id/usb-1a86_USB-Serial-if00-port0 sudo service klipper start Pour que ce flashage réussisse il faut que Octoprint ne soit pas connecté à l’imprimante (bouton «Déconnecter»). Seconde étape, configurer Octoprint Configurer Octoprint pour qu’il utilise Klipper : ajouter un port série nommé /tmp/printer dans les préférences, Connexion série, onglet Général, «ports série supplémentaires» puis sauvegarder. Revenir dans les préférences, dans l’onglet «comportement» modifier à la section «Que faire en cas d’erreur de firmware» en cochant «Annuler toutes impressions en cours mais rester connecté à l’imprimante», enregistrer. Reste à tester la connexion après avoir sélectionné le bon port série ( /tmp/printer) puis en cliquant sur le bouton «Connecter». En utilisant le terminal avec la commande «status», une erreur est retournée puisque la configuration de l’imprimante n’est pas faite. Pour me faciliter encore plus la vie, j’ajoute un plugin à Octoprint : Octoklipper Troisième étape, configurer Klipper Il reste à préparer un fichier de configuration correspondant à ma CR10V2. Dans les fichiers du répertoire «config» de Klipper, celle-ci n’est pas présente. Il y en a pour la CR10 et la CR10S (printer-creality-cr10-2017.cfg et printer-creality-cr10s-2017.cfg) Dans les sources du Marlin2, les attributions des pattes d’un microcontrôleur sont regroupées dans le dossier src/pins/«controleur»/pins_«carte».h. La carte de la CR10-V2, version2.5.2 (Atmega2560), est déclarée comme une RAMPS modifiée par Creality : #define MOTHERBOARD BOARD_RAMPS_CREALITY les numéros des pins à déclarer seront donc dans pins_RAMPS_CREALITY.h (et en inclusion pins_RAMPS.h). Le fichier prévu pour une CR10S correspond aux attributions, il y aura donc moins de travail de tâtonnement et ça c’est cool. Il y a bien quelques différences mais elles sont minimes. Ayant un Bltouch d’installé, le pin utilisé est celui du Z_MAX alors que le endstop est sur le Z_MIN. Je complète ce fichier de configuration avec les options dont j’ai besoin, place ce fichier dans le home du Pi et relance Klipper soit via le terminal d’Octoprint («firmware_restart») ou via le plugin Octoklipper et le bouton «Firmware» ou «Host» Quatrième étape, vérifier la configuration La documentation relate les étapes à suivre pas-à-pas : vérifier l’affichage des températures vérifier l’«arrêt d’urgence» (M112) vérifier la mise en chauffe du lit et de la tête vérifier le fonctionnement des moteurs vérifier les fins de course vérifier les pilotes des moteurs vérifier le moteur de l’extrudeur calibrer les réglages de PID (tête / lit) Dans l’ensemble peu de modifications à effectuer pour que l’ensemble fonctionne (au cas où, j’avais le doigt prêt à appuyer sur l’interrupteur de l’alimentation). Toutes les attributions de «pins» format «arduino» (déclaration pin_map dans la section [mcu] du fichier de configuration) sont correctes. Possédant un détecteur de fin de filament, j’ai juste eu à inverser sa logique de fonctionnement : au départ : switch_pin: ar2 devient : switch_pin: !ar2 Ma CR10V2 a été modifiée par l’adjonction d’un système d’auto-nivellement (BLTouch de Antclabs ®). Creality a prévu d’origine la possibilité de cet ajout, tout est pré câblé sur la carte mère, il suffit de connecter la prise femelle du câble du Bltouch (5 broches avec détrompeur) sur l’embase électronique située sous l’extrudeur. Cela évite d’ouvrir le boîtier d’alimentation pour déconnecter le contacteur de fin de course de l’axe Z branché sur le ZMIN. La pré connexion du BLTouch le branche sur le ZMAX donc la «pin» à déclarer est la n”19 en mode «pullup» : [bltouch] # CR10V2, connexion sur ZMAXPIN (19) sensor_pin: ^ar19 control_pin: ar11 pin_move_time: 0.4 x_offset: 47 y_offset: 0 # Increase Z_Offset to lower nozzle closer to bed. PLA 1.55 #z_offset: 1.55 speed: 60 Cinquième étape, améliorer la configuration L’imprimante étant à nouveau fonctionnelle, quelques impressions sont réalisées. Auparavant, il me faut modifier les gcodes de démarrage et de fin de mon trancheur (Cura dans un premier temps). En effet, Klipper n’utilise pas la totalité de ceux prévus pour un Marlin (ex : G29). Cette page donne tous les gcodes connus de Klipper. Il utilise de nouvelles directives (extended G-code) sous forme de mots clés équivalents aux gcodes (ex : STATUS, FIRMWARE_RESTART, BED_MESH_CALIBRATE, …). L’avantage de ce système est que l’on peut créer des macros relativement complexes afin de simuler leur équivalent en gcode Marlin. Par exemple pour mes gcodes de démarrage / fin, je vais utiliser les macros suivantes : [gcode_macro START_PRINT] variable_T_BED: 60 variable_T_EXTRUDER: 200 gcode: M117 Home sweet home # Use absolute coordinates G90 # Reset the G-Code Z offset (adjust Z offset if needed) SET_GCODE_OFFSET Z=0.0 # Home the printer G28 # Use the bed mesh #G29 BED_MESH_PROFILE LOAD=cr10v2 # Move the nozzle near the bed G1 X15 Y20 Z5 F6000 M117 Chauffe Marcel # Start bed heating and continue M140 S{T_BED} {% if printer.heater_bed.temperature < params.T_BED|float*0.85 %} M190 S{params.T_BED|float*0.85} # wait till 0.85 of bed temp is reached, then continue {% endif %} M140 S{T_BED} M104 S170 # Prechauffe buse M190 S{T_BED} M109 S{T_EXTRUDER} # Prime line PURGE M117 C’est parti, mon Kiki... [gcode_macro END_PRINT] gcode: M117 C’est fini # move z up G91 G1 E-2 Z+10 F3000 # absolute xy G90 G1 X5 Y295 F2000 #disable hotend and heated bed M104 S0 M140 S0 # disable steppers M84 BED_MESH_CLEAR # prime the nozzle [gcode_macro PURGE] gcode: M117 Ligne de purge G92 E0 ;Reset Extruder # move z axis G1 Z2.0 F3000 ;Move Z Axis up # move to prime position G1 X2 Y30 Z0.28 F5000.0 ;Move to start position G1 X2 Y200.0 Z0.28 F1500.0 E15 ;Draw the first line G1 X3 Y200.0 Z0.28 F5000.0 ;Move to side a little G1 X3 Y50 Z0.28 F1500.0 E30 ;Draw the second line G92 E0 ;Reset Extruder G1 Z2.0 F3000 ;Move Z Axis up # G29 => (1) home all (2) get bed mesh (3) move nozzle to corner so it doesnt ooze on the bed while heating up. [gcode_macro G29] gcode: G28 BED_MESH_CALIBRATE G0 X0 Y0 Z10 F6000 BED_MESH_PROFILE save=cr10v2 Dans Cura, mes gcodes de démarrage / fin deviennent ) : ; gcode macro Klipper (démarrage) START_PRINT T_BED={material_bed_temperature_layer_0} T_EXTRUDER={material_print_temperature_layer_0} ; gcode macro Klipper (fin) END_PRINT Avant de me lancer dans les impressions, je réalise la calibration de l’extrudeur (100 mm demandés = 100 mm fourni), méthode «matérielle only» donc PTFE déconnecté en sortie d’extrudeur. Résultats, un poil trop (trois tests de 100 mm, au lieu de 300mm, j’ai 303, donc règle de trois pour affiner mes pas qui passent de 0,00714285 (1/140 pas) à 0.00719666 (1/138.95 pas) [mon extrudeur a été remplacé par celui des CR10S Pro, BMG sans réduction]. Un premier cube de calibration (25x25x25mm) est tranché puis envoyé à Octoprint afin d’être imprimé. Les résultats dimensionnels sont très corrects (25 x 25 x 25,02 (XxYxZ). Au dessus j’ai bien 10 , 20 et 6 mm, les ponts sont bons, pas de «stringing» sur la face colonnes, un beau cercle, des «overhang» quasi parfaits. Le seul défaut est un léger «pied d’éléphant». Impression faite avec du PLA 3D870 Blanc (le stock de filament commence à s’épuiser), température de 215°, vitesse d’impression de test à 100 mm/s sauf pour les parois, interne à 75 mm/s, externe à 50 mm/s. J’en profite en continuant mes tests, j’ajoute la gestion de la rétraction dans le firmware Klipper (je reprends les valeurs utilisées par Cura) : [firmware_retraction] retract_length: 5.2 retract_speed: 25 unretract_extra_length: 0 unretract_speed: 20 et en ajoutant l’option dans Cura : Un autre cube de calibration (30x30x30) avec des cylindres internes de profondeur 20 mm sert à tester cette «nouvelle rétraction». L’examen du gcode obtenu permet de voir les nouveaux gcodes de rétraction (G10/ G11). ;Generated with Cura_SteamEngine 4.6.1 M82 ;absolute extrusion mode ; gcode macro Klipper START_PRINT T_BED=60 T_EXTRUDER=215 G92 E0 G92 E0 G10 ;LAYER_COUNT:150 ;LAYER:0 M106 S255 G0 F6000 X165.065 Y129.811 Z0.2 ;TYPE:SKIRT G11 G1 F1200 X165.708 Y129.86 E0.02145 … Sixième étape, Pressure Advance Qu’est que c'est que ça que c'est ? D’après la documentation, «Pressure advance does two useful things - it reduces ooze during non-extrude moves and it reduces blobbing during cornering. (traduction approximative : L'avance à la pression a deux effets utiles : elle réduit le suintement lors des mouvements sans extrusion et elle réduit les coups dans les virages (mon interprétation : les coins sont plus francs, moins arrondis )). C’est plus ou moins l’équivalent du «Linear advance» pour Marlin. Malheureusement, cette option, je ne peux pas l’activer dans Marlin avec ma carte Creality «silencieuse» équipée de pilotes TMC2208 déclarés en mode standalone. Si je l’active, mon extrudeur va plus ou moins rapidement arrêter de fonctionner. Depuis quelques mois (mi mars 2020), le développeur de Klipper a fourni une correction qui permet d’utiliser ce firmware avec cette option pour des TMC2208 en standalone. En suivant scrupuleusement la documentation, la tour carrée est tranchée, les directives d’impression sont données, l’impression est lancée. Une fois finie et examinée, mes valeurs de PA sont ajoutées dans la section [extruder] du fichier de configuration. Conclusion (provisoire) Klipper est un excellent firmware qui mérite d’être essayé. Une fois le flashage sur la carte mère réalisé, sa facilité de paramétrage, de tests est sans commune mesure avec Marlin : on effectue les modifications dans le fichier de configuration, après un RESTART ou un FIRMWARE_RESTART, la nouvelle configuration est prise en compte, plus besoin de modifier son (se) fichier(s) «.h» puis de recompiler et installer en flashant. La possibilité des «macros» est juste énorme, de nombreuses choses deviennent possibles. Klipper peut gérer (je n’ai pas testé) plusieurs cartes (en gros principe de maître / esclave), l’absence d’une fonctionnalité sur la carte principale n’oblige pas forcément à en changer. On ajoute une autre carte (une RAMPS par exemple) et on peut utiliser ses fonctionnalités en plus de la carte «principale». Merci @Tircown de m’avoir obligé à sortir de ma zone de confort et un grand merci @Nibb31 pour avoir créer son excellent tutoriel. A suivre… PS : pour ceux qui voudraient tenter l’aventure, comme promis en début du sujet, mes fichiers de configurations actuellement utilisés et fonctionnels sur ma CR10V2 avec sa carte d’origine V2.5.2. Fichiers à placer dans le home de Pi, là où se trouve Octoprint (/home/pi): Ma configuration est désormais accessible sur mon dépôt Github : https://github.com/fran6p/cfg_klipper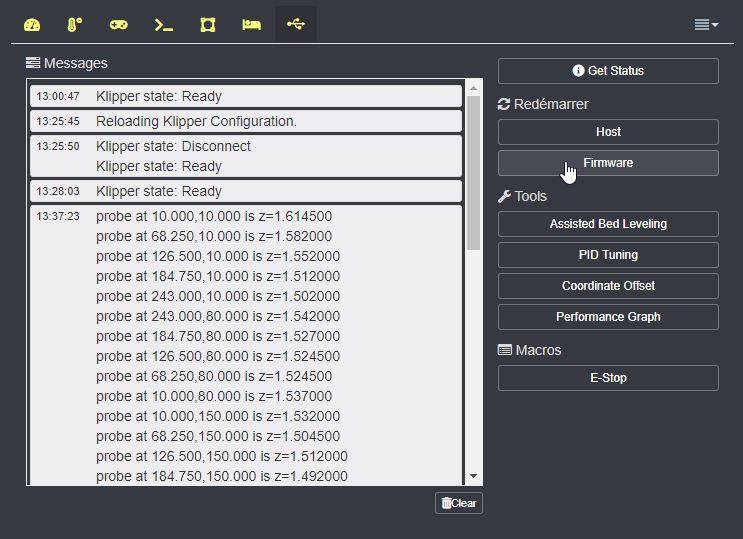



- 441 réponses
-
- 11
-

-

-

-
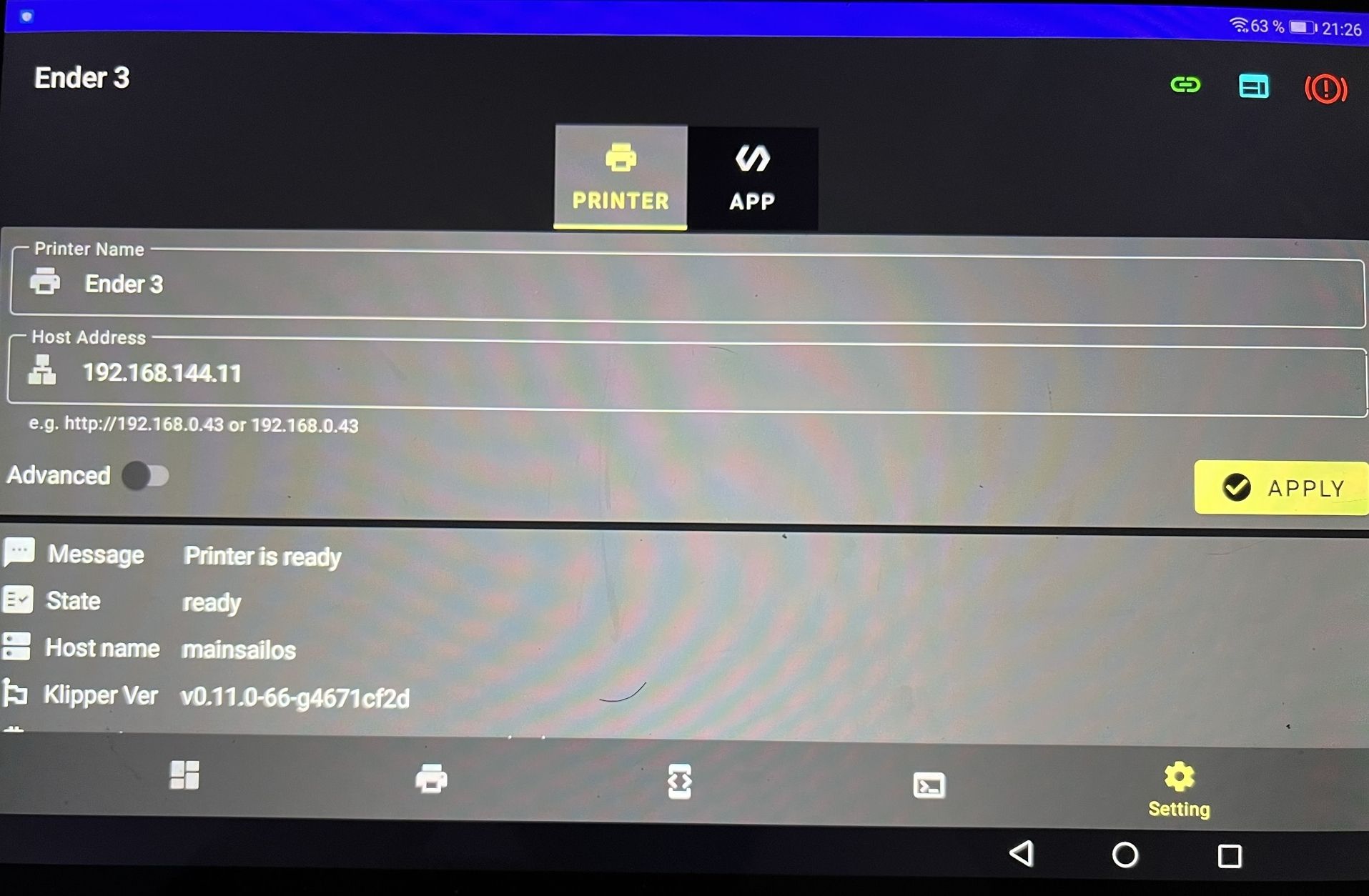
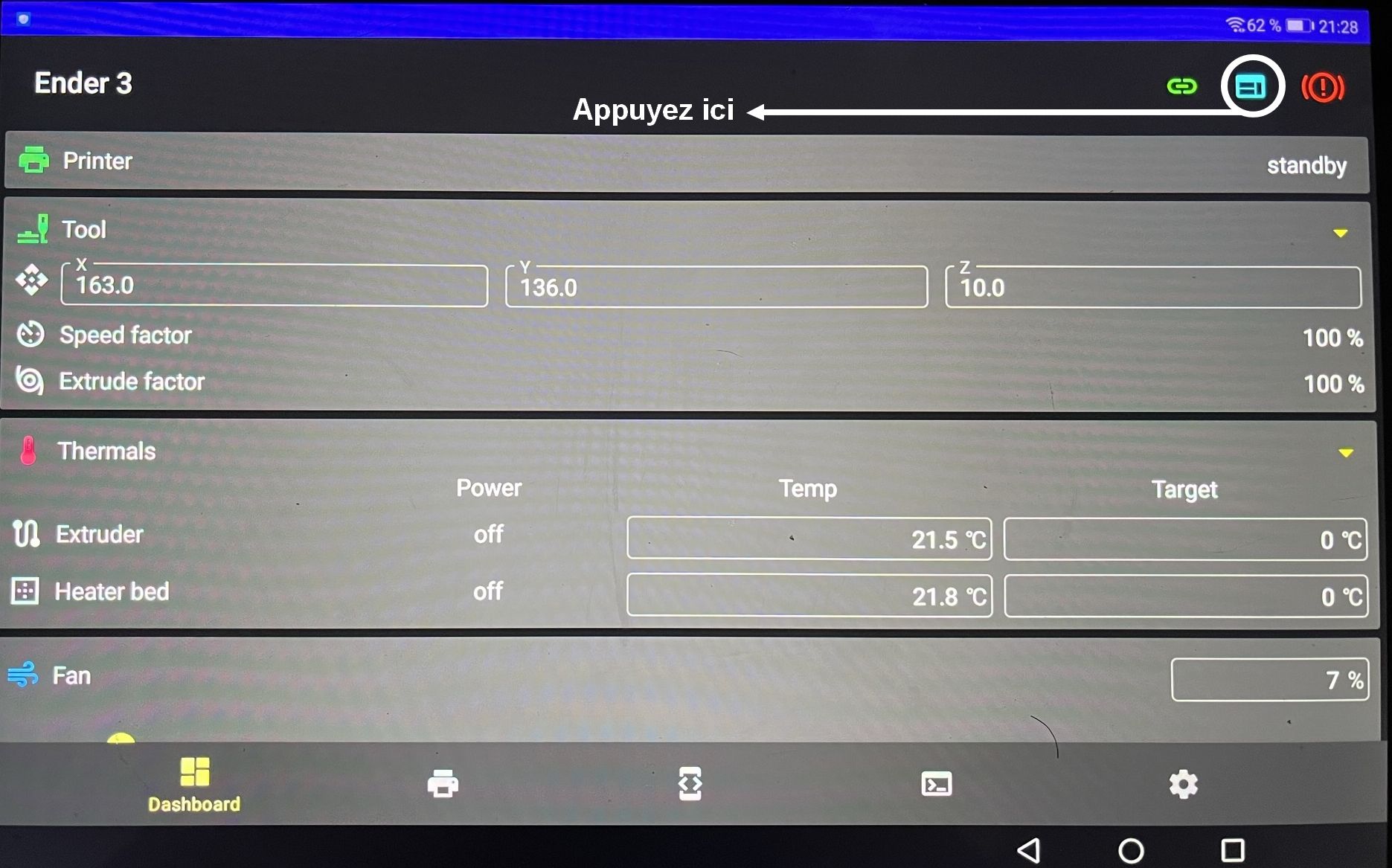
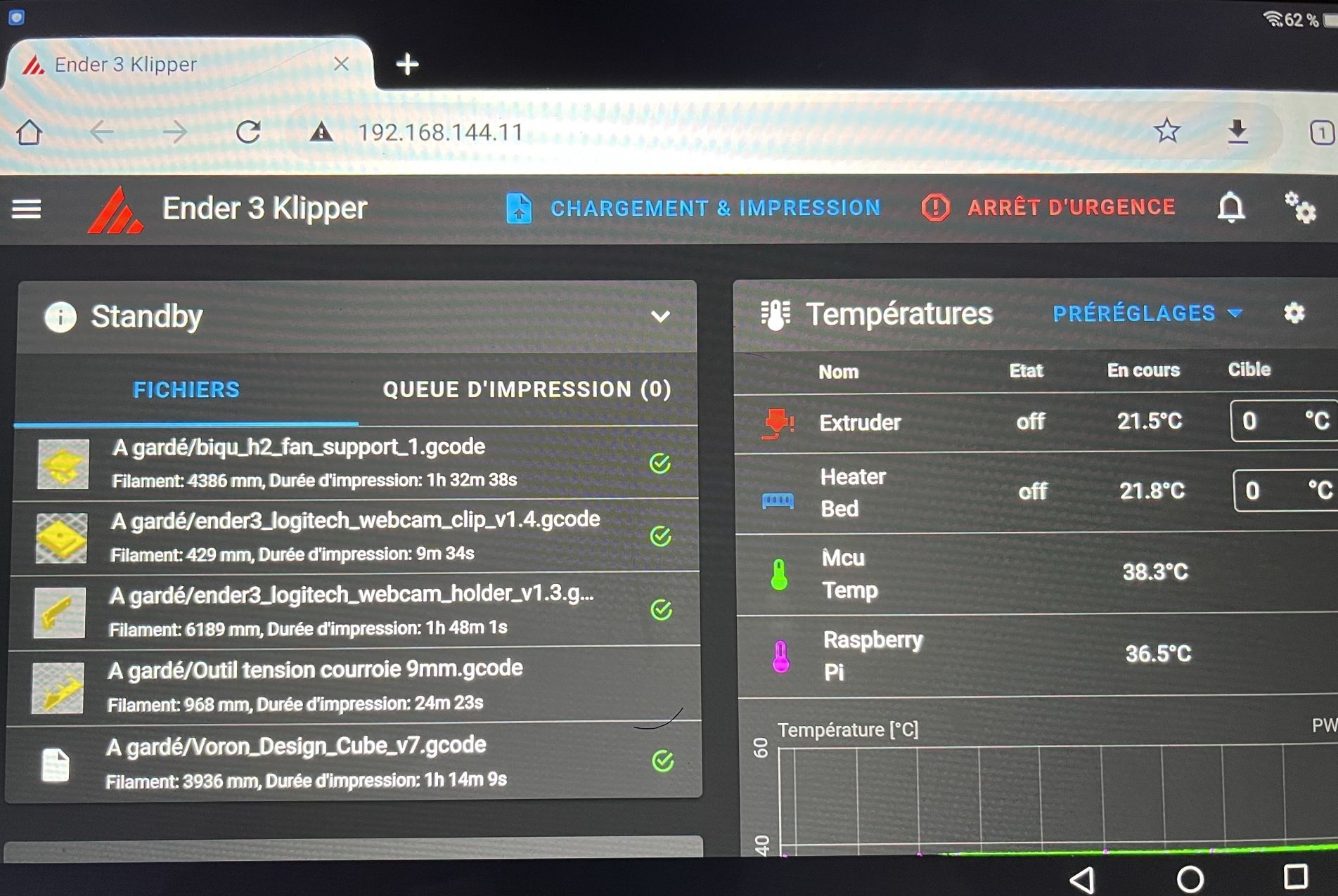
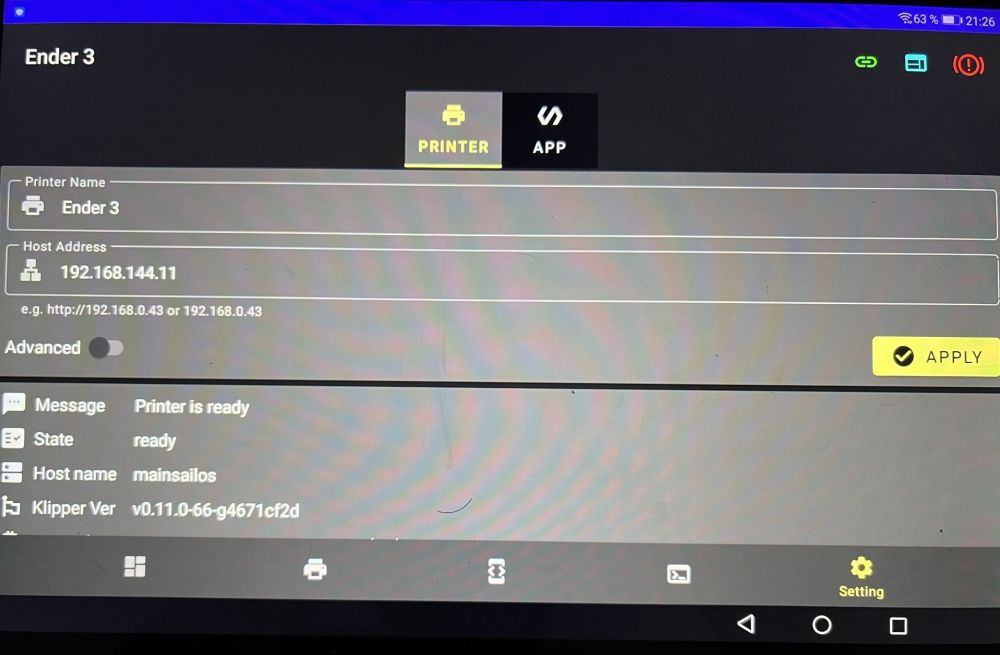
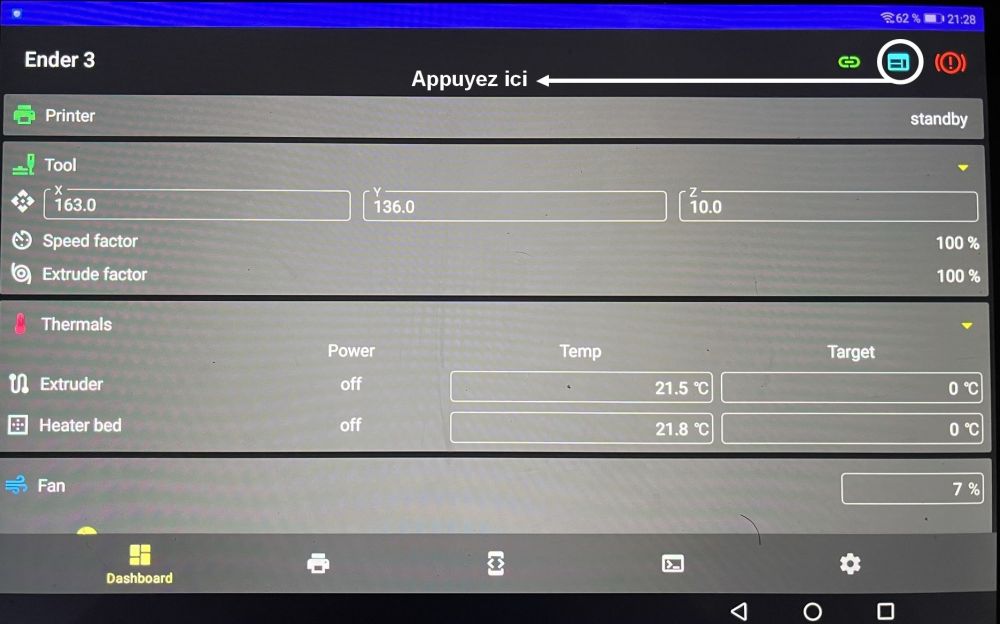
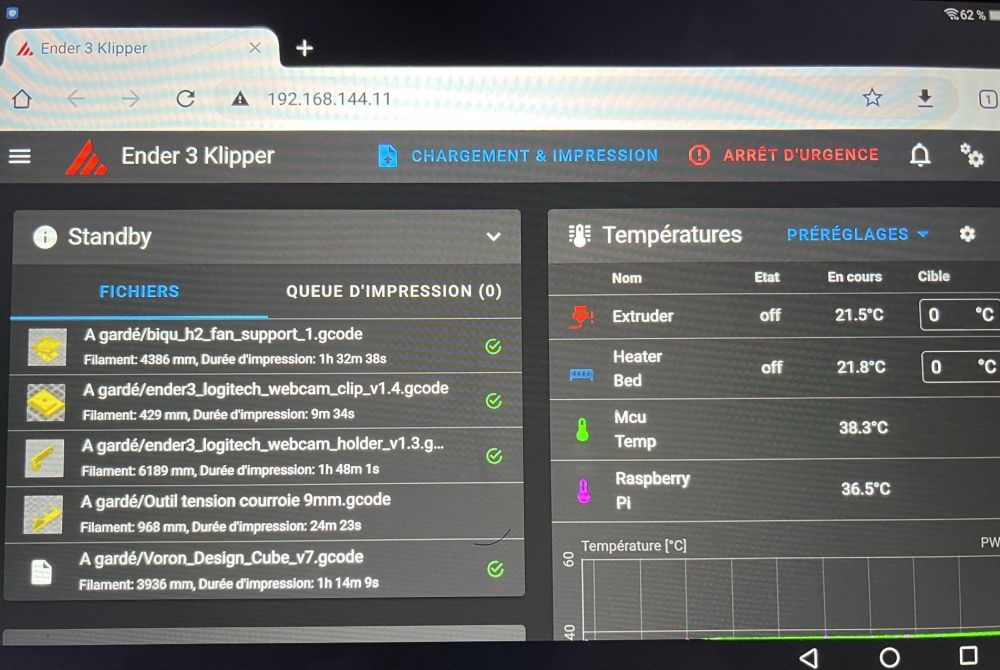
Bonjour/Bonsoir Je ne sais pas si beaucoup d'entre vous aimeraient avoir Klipper sur tablette Androïd, mais ce n'est ni compliqué ni pénible à faire. Voici une astuce toute simple et qui ne prend que quelques minutes pour avoir Klipper sur Android. Etape 1: Télécharger Klipperoid pour Android Etape 2: Indiquer l'adresse IP de votre Raspberry Etape 3 : C'est déjà fini, à vous Klipper sous Androïd sans à galérer plus que ça. Cliquez sur les options, renseignez les champs comme suis Appuyez simplement ici comme le montre la capture. Vous serez alors redirigé vers votre navigateur ou Klipper s'ouvrira comme sur votre PC. A vous la tablette sous Klipper sans passer des heures à tout configurer PS: les captures d'écran sont assez nulles, mais j'avais que ça sous la main, j'espère que ça en aidera plus d'un et vous seras utile. Si ce "Tuto" n'à pas lieux d'existé, vous pouvez le supprimé. @PPAC je comprend pas je l'avais mis dans la section tuto

-
 Bonjour @fran6p ! Je viens de terminer l'installation et la configuration de Klipper sur ma Ender 3 Pro. Elle est montée avec une SKR mini E3 V2.0 et un TFT 35 V3.0 de chez Bigtreetech (+ relay PS-on + unité dcdc 5v + UPS 24V + smart détecteur de filament) ainsi qu'un direct Drive E3D Titan Aero et un BLtouch 3.1 Antclabs. Le fichier config de base de la SKR mini est fournit par Klipper et c'est du tout simplement rêvé ! Comme beaucoup qui se lancent dans l'aventure Klipper, je suis partit d'une copie presque blanche, et j'ai chiné dans tous les coins du web les tutos et infos de montage, installation et configuration. Et en effet, tout est en anglais donc il ne faut pas être en conflit avec la langue. -> Bon alors maintenant, il est important pour moi de parler d'un point très important à mes yeux. Avis aux modérateurs, si ça dérange dites le moi, je déplacerai ou je l'écrirai sur ma porte d'entrée, mais il y aura moins de visibilité. Alors Dans mon cas j'ai 4 pc portables qui commençaient à vieillir et que je n'utilisait plus à la maison. Il y a de ça 1 an environ, j'ai fait beaucoup de choix personnels concernant mes convictions informatiques. Bon pour commencer, et mettre les points sur les i (vous allez vite comprendre l'analogie) Je tiens à mentionner que dans un premier cas, j'ai toujours accordé une haine étendue envers Apple et sa politique de marketing, d’obsolescence imposée, qui manipule le consommateur, lui lave le cerveau, et le modèle à sa guise. -> "Vas y Steeve, ces moutons n'y verrons que du feu !! Et se battront pour acheter à prix d'or ce qu'on leur vendra comme indispensable pour faire une recherche google, écrire un texte ou prendre une photo. Puis dans 3 mois on leur dira que ce qu'ils ont acheté ça ne vaut plus rien et qu'ils peuvent le laisser aux dinosaures. Et qu'on a mieux et plus cher pour aller sur google..." "MAIS ATTENTION STEEVE ! Pour bien les emprisonner et les sucer jusqu'au bâton. Il faut aussi qu'ils n'aient pas le choix d'utiliser uniquement notre Hardware, nos softwares, nos services, nos formats de fichiers. (On mettra un I devant ça fera penser au bâton ) Et s'en suivent l'Iphone, l'Ipod, l'Itunes, l'Ichargeur, l'Irouleau de PQ et les Icybermenottes... Huk huk huk huk Ce sont des pourris qui ont fournit et donné à notre monde le besoin de consommation qu'il a maintenant. Je les détestes. Mais voilà, Microsoft a jusque là été plus en retrait là dessus, mais remonte à leur niveau de plus en plus. Et se moque de plus en plus ouvertement du consommateur. Quelle désolation j'ai eu à la découverte de Windows 11...qui n'est d'autre que Windows 10, pour lequel tout ce que j'affectionnais a été retiré... Et j'en passe, car franchement la liste est longue. Les mises à jours se succèdent et les erreurs de choix ne sont pas corrigés. Je vois déjà des aperçus de Windows 12 et ça me glace. Mais en plus de ça, petit consommateur incrédule que tu es. Ce nouveau Windows 10 ne fonctionne pas sur ton PC... Huk huk huk huk . Et comme on arrête le support de Windows 10 dans quelques jours, il va falloir que tu te rapproche de ton vendeur préféré le plus proche... Quoi Tu ne sais pas qui c'est ? Bah regarde bien, c'est celui qui est en train de se frotter les mains. Si Si regarde bien, ils est accoudé sur une pile de RTX4090. (D'ailleurs c'est le moment d'en profiter, en ce moment, l'extincteur est offert. La planète te remercie et les ours blancs préparent leur entrée dans le panthéon). Enfin bon... tout ces petits paragraphes d'espoir pour introduire mes choix informatiques. ET DONC JE ME SUIS NATURELLEMENT ORIENTE VERS LINUX. Ahhhh Linux, la vie, l'espoir, le partage, la communauté, l'open source, LE LIBRE ! La meilleures des philosophie, complètement étouffée et maquillée du grand public par les Titans de l'industrie et de la consommation. Quand j'ai vu une PUB la semaine dernière pour une société de crédit dirigée par un buisson vert, qui dit à toi pauvre moutons "Votre PC ne fonctionne plus comme vous le voulez" en faisant un petit clin d’œil à son ami Bill G posté derrière toi (Bah oui tu ne l'as pas vu mais il est là). Et bien prenez un crédit à la consommation et on s'occupe de tout....... J'ai envie de pleurer... Il y a maintenant des distributions de Linux à couper le souffle. Accessibles à TOUT le monde. Et qui tournent au TOP sur des PC totalement dépassés aux yeux de Big M. Mais ça, la plus grande partie des consommateurs ne le savent pas. Personne ne le dit, tout le monde se tait. Et tout ça c'est insupportable pour moi, dessinateur industriel, d'être obligé d'utiliser Windows pour mes logiciels Pro de dessin. Parce qu'il ne tournent que sur Windows. Sur Linux ça fonctionne pas... et NON ! C'est pas compatible..... Enfin ils sont entièrement créés et développés sous Linux, mais pour TOI, c'est pas compatible. NON, désolé... Mais ne t'en fais pas nous avons une version Windows entièrement fonctionnelle que nous allons te proposer pendant un an à prix d'or défiant toute concurrence ! Huk huk huk huk Et l'année prochaine nous enlèverons un bug, en rajouterons 2, mais tu devras accepter qu'il sera un peu plus cher... Et oui, les bugs ça coute cher l'ami. Ça m'a fait du bien d'écrire ça. Bon cette fois ci, je reviens à mes moutons...... enfin pardon, à Klipper (N'allez pas me confondre avec Big M ou Big A ) J'ai donc utilisé un de mes "Vieux" PC, totalement modernisés par une excellente distribution de Linux pour utiliser Klipper sur ma Ender3 (Elle aussi open source) L'open source au service de l'open source Donc si vous avez un vieux PC au fond d'un tiroir inutile d'acheter un PI. Et les vieux PC, ça ne consomme pas beaucoup plus qu'un RPI 4 J'ai entendu des oui mais j'ai pas de place pour poser un "énorme" pc portable à coté de ma petite imprimante 3D... ET bah le pc tu le fixe sous le bureau, ou au mur, ou tu fais une rehausse sous ton imprimante et tu le glisse dessous... De toute façon tu le contrôle depuis ton pc principal, comme tu l'aurais fait pour un PI. Même pas besoin d'avoir un clavier, une souris ou un écran ce PC portable magique ! Puis j'ai utilisé KIAUH (klipper install and update helper) c'est mortel, il se charge de tout. J'ai installé Mainsail. J'ai passé pas mal d'heures à éplucher la doc de Klipper pour adapter le fichier config à ma Ender 3 modifiée Bon pour le coup, pour moi la doc était en anglais, je n'avais à ce moment pas encore découvert le super travail de traduction de @fran6p ! Merci encore à toi pour ceux qui galèrent avec l'anglais, et même si sans ça, ça l'a fait pour moi, je m’appuierai dessus certainement maintenant ! J'ai aussi bien épluché la doc Mainsail. A part quelques doutes pour lesquels j'ai mis quelques heures à lever, tout c'est relativement bien passé. Et maintenant j'ai Klipper, qui fonctionne au top tu ma Ender 3 ! J'en suis fier et plus que ravis !!! Bon mon TFT 35 n'est pas compatible Klipper, mais on s'en moque. Je vais peut-être remettre l'écran d'origine de la E3 Pro, mais même pas sûr... Il me reste maintenant tous les accessoires bigtreetech à configurer ( Relay PS-on + Unité dcdc 5v + UPS 24V + Smart détecteur de filament) Tout ça m'a énormément motivé, je vais aussi mettre Klipper sur ma Sidewinder X2, qui elle est entièrement d'origine, et le fichier config est aussi fournit par Klipper. Ca devrait être un jeu maintenant. Et j'ai aussi mon IDEX, la TENLOG TL-D3 pro qui je voudrais convertir... Pas la même histoire par contre... Il y a un fichier config sur github fait par Matti125 pour la Hand 2 et forké pour la TL-D3... Mais cette config c'est pour la carte 8 bits de Tenlog et la mienne a la nouvelle 32 bits. Je n'ai à ce jour rien trouvé sur cette carte. Il va peut-être falloir que je m’appuie sur le fichier PIN de Marlin. Mais là c'est départ copie blanche et le chemin risque d'être caillouteux. En tout cas merci à vous chers amis Francophone pour ce partage de connaissances dans la langue de Molière, c'est une chance que nous avons ! Merci à ceux qui m'ont lu, c'est bon vous pouvez retourner la tête vers votre imprimante Bons prints à vous !
Bonjour @fran6p ! Je viens de terminer l'installation et la configuration de Klipper sur ma Ender 3 Pro. Elle est montée avec une SKR mini E3 V2.0 et un TFT 35 V3.0 de chez Bigtreetech (+ relay PS-on + unité dcdc 5v + UPS 24V + smart détecteur de filament) ainsi qu'un direct Drive E3D Titan Aero et un BLtouch 3.1 Antclabs. Le fichier config de base de la SKR mini est fournit par Klipper et c'est du tout simplement rêvé ! Comme beaucoup qui se lancent dans l'aventure Klipper, je suis partit d'une copie presque blanche, et j'ai chiné dans tous les coins du web les tutos et infos de montage, installation et configuration. Et en effet, tout est en anglais donc il ne faut pas être en conflit avec la langue. -> Bon alors maintenant, il est important pour moi de parler d'un point très important à mes yeux. Avis aux modérateurs, si ça dérange dites le moi, je déplacerai ou je l'écrirai sur ma porte d'entrée, mais il y aura moins de visibilité. Alors Dans mon cas j'ai 4 pc portables qui commençaient à vieillir et que je n'utilisait plus à la maison. Il y a de ça 1 an environ, j'ai fait beaucoup de choix personnels concernant mes convictions informatiques. Bon pour commencer, et mettre les points sur les i (vous allez vite comprendre l'analogie) Je tiens à mentionner que dans un premier cas, j'ai toujours accordé une haine étendue envers Apple et sa politique de marketing, d’obsolescence imposée, qui manipule le consommateur, lui lave le cerveau, et le modèle à sa guise. -> "Vas y Steeve, ces moutons n'y verrons que du feu !! Et se battront pour acheter à prix d'or ce qu'on leur vendra comme indispensable pour faire une recherche google, écrire un texte ou prendre une photo. Puis dans 3 mois on leur dira que ce qu'ils ont acheté ça ne vaut plus rien et qu'ils peuvent le laisser aux dinosaures. Et qu'on a mieux et plus cher pour aller sur google..." "MAIS ATTENTION STEEVE ! Pour bien les emprisonner et les sucer jusqu'au bâton. Il faut aussi qu'ils n'aient pas le choix d'utiliser uniquement notre Hardware, nos softwares, nos services, nos formats de fichiers. (On mettra un I devant ça fera penser au bâton ) Et s'en suivent l'Iphone, l'Ipod, l'Itunes, l'Ichargeur, l'Irouleau de PQ et les Icybermenottes... Huk huk huk huk Ce sont des pourris qui ont fournit et donné à notre monde le besoin de consommation qu'il a maintenant. Je les détestes. Mais voilà, Microsoft a jusque là été plus en retrait là dessus, mais remonte à leur niveau de plus en plus. Et se moque de plus en plus ouvertement du consommateur. Quelle désolation j'ai eu à la découverte de Windows 11...qui n'est d'autre que Windows 10, pour lequel tout ce que j'affectionnais a été retiré... Et j'en passe, car franchement la liste est longue. Les mises à jours se succèdent et les erreurs de choix ne sont pas corrigés. Je vois déjà des aperçus de Windows 12 et ça me glace. Mais en plus de ça, petit consommateur incrédule que tu es. Ce nouveau Windows 10 ne fonctionne pas sur ton PC... Huk huk huk huk . Et comme on arrête le support de Windows 10 dans quelques jours, il va falloir que tu te rapproche de ton vendeur préféré le plus proche... Quoi Tu ne sais pas qui c'est ? Bah regarde bien, c'est celui qui est en train de se frotter les mains. Si Si regarde bien, ils est accoudé sur une pile de RTX4090. (D'ailleurs c'est le moment d'en profiter, en ce moment, l'extincteur est offert. La planète te remercie et les ours blancs préparent leur entrée dans le panthéon). Enfin bon... tout ces petits paragraphes d'espoir pour introduire mes choix informatiques. ET DONC JE ME SUIS NATURELLEMENT ORIENTE VERS LINUX. Ahhhh Linux, la vie, l'espoir, le partage, la communauté, l'open source, LE LIBRE ! La meilleures des philosophie, complètement étouffée et maquillée du grand public par les Titans de l'industrie et de la consommation. Quand j'ai vu une PUB la semaine dernière pour une société de crédit dirigée par un buisson vert, qui dit à toi pauvre moutons "Votre PC ne fonctionne plus comme vous le voulez" en faisant un petit clin d’œil à son ami Bill G posté derrière toi (Bah oui tu ne l'as pas vu mais il est là). Et bien prenez un crédit à la consommation et on s'occupe de tout....... J'ai envie de pleurer... Il y a maintenant des distributions de Linux à couper le souffle. Accessibles à TOUT le monde. Et qui tournent au TOP sur des PC totalement dépassés aux yeux de Big M. Mais ça, la plus grande partie des consommateurs ne le savent pas. Personne ne le dit, tout le monde se tait. Et tout ça c'est insupportable pour moi, dessinateur industriel, d'être obligé d'utiliser Windows pour mes logiciels Pro de dessin. Parce qu'il ne tournent que sur Windows. Sur Linux ça fonctionne pas... et NON ! C'est pas compatible..... Enfin ils sont entièrement créés et développés sous Linux, mais pour TOI, c'est pas compatible. NON, désolé... Mais ne t'en fais pas nous avons une version Windows entièrement fonctionnelle que nous allons te proposer pendant un an à prix d'or défiant toute concurrence ! Huk huk huk huk Et l'année prochaine nous enlèverons un bug, en rajouterons 2, mais tu devras accepter qu'il sera un peu plus cher... Et oui, les bugs ça coute cher l'ami. Ça m'a fait du bien d'écrire ça. Bon cette fois ci, je reviens à mes moutons...... enfin pardon, à Klipper (N'allez pas me confondre avec Big M ou Big A ) J'ai donc utilisé un de mes "Vieux" PC, totalement modernisés par une excellente distribution de Linux pour utiliser Klipper sur ma Ender3 (Elle aussi open source) L'open source au service de l'open source Donc si vous avez un vieux PC au fond d'un tiroir inutile d'acheter un PI. Et les vieux PC, ça ne consomme pas beaucoup plus qu'un RPI 4 J'ai entendu des oui mais j'ai pas de place pour poser un "énorme" pc portable à coté de ma petite imprimante 3D... ET bah le pc tu le fixe sous le bureau, ou au mur, ou tu fais une rehausse sous ton imprimante et tu le glisse dessous... De toute façon tu le contrôle depuis ton pc principal, comme tu l'aurais fait pour un PI. Même pas besoin d'avoir un clavier, une souris ou un écran ce PC portable magique ! Puis j'ai utilisé KIAUH (klipper install and update helper) c'est mortel, il se charge de tout. J'ai installé Mainsail. J'ai passé pas mal d'heures à éplucher la doc de Klipper pour adapter le fichier config à ma Ender 3 modifiée Bon pour le coup, pour moi la doc était en anglais, je n'avais à ce moment pas encore découvert le super travail de traduction de @fran6p ! Merci encore à toi pour ceux qui galèrent avec l'anglais, et même si sans ça, ça l'a fait pour moi, je m’appuierai dessus certainement maintenant ! J'ai aussi bien épluché la doc Mainsail. A part quelques doutes pour lesquels j'ai mis quelques heures à lever, tout c'est relativement bien passé. Et maintenant j'ai Klipper, qui fonctionne au top tu ma Ender 3 ! J'en suis fier et plus que ravis !!! Bon mon TFT 35 n'est pas compatible Klipper, mais on s'en moque. Je vais peut-être remettre l'écran d'origine de la E3 Pro, mais même pas sûr... Il me reste maintenant tous les accessoires bigtreetech à configurer ( Relay PS-on + Unité dcdc 5v + UPS 24V + Smart détecteur de filament) Tout ça m'a énormément motivé, je vais aussi mettre Klipper sur ma Sidewinder X2, qui elle est entièrement d'origine, et le fichier config est aussi fournit par Klipper. Ca devrait être un jeu maintenant. Et j'ai aussi mon IDEX, la TENLOG TL-D3 pro qui je voudrais convertir... Pas la même histoire par contre... Il y a un fichier config sur github fait par Matti125 pour la Hand 2 et forké pour la TL-D3... Mais cette config c'est pour la carte 8 bits de Tenlog et la mienne a la nouvelle 32 bits. Je n'ai à ce jour rien trouvé sur cette carte. Il va peut-être falloir que je m’appuie sur le fichier PIN de Marlin. Mais là c'est départ copie blanche et le chemin risque d'être caillouteux. En tout cas merci à vous chers amis Francophone pour ce partage de connaissances dans la langue de Molière, c'est une chance que nous avons ! Merci à ceux qui m'ont lu, c'est bon vous pouvez retourner la tête vers votre imprimante Bons prints à vous ! -
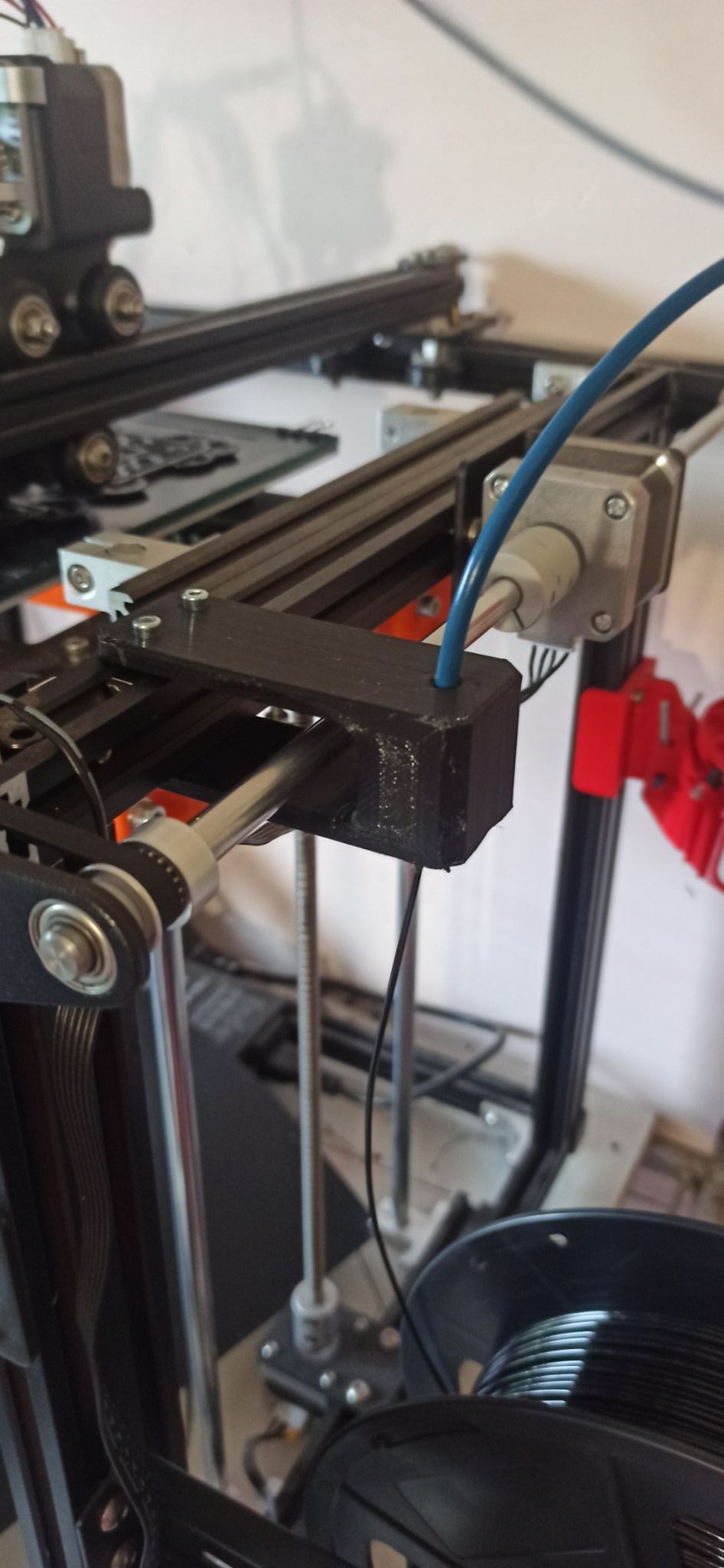
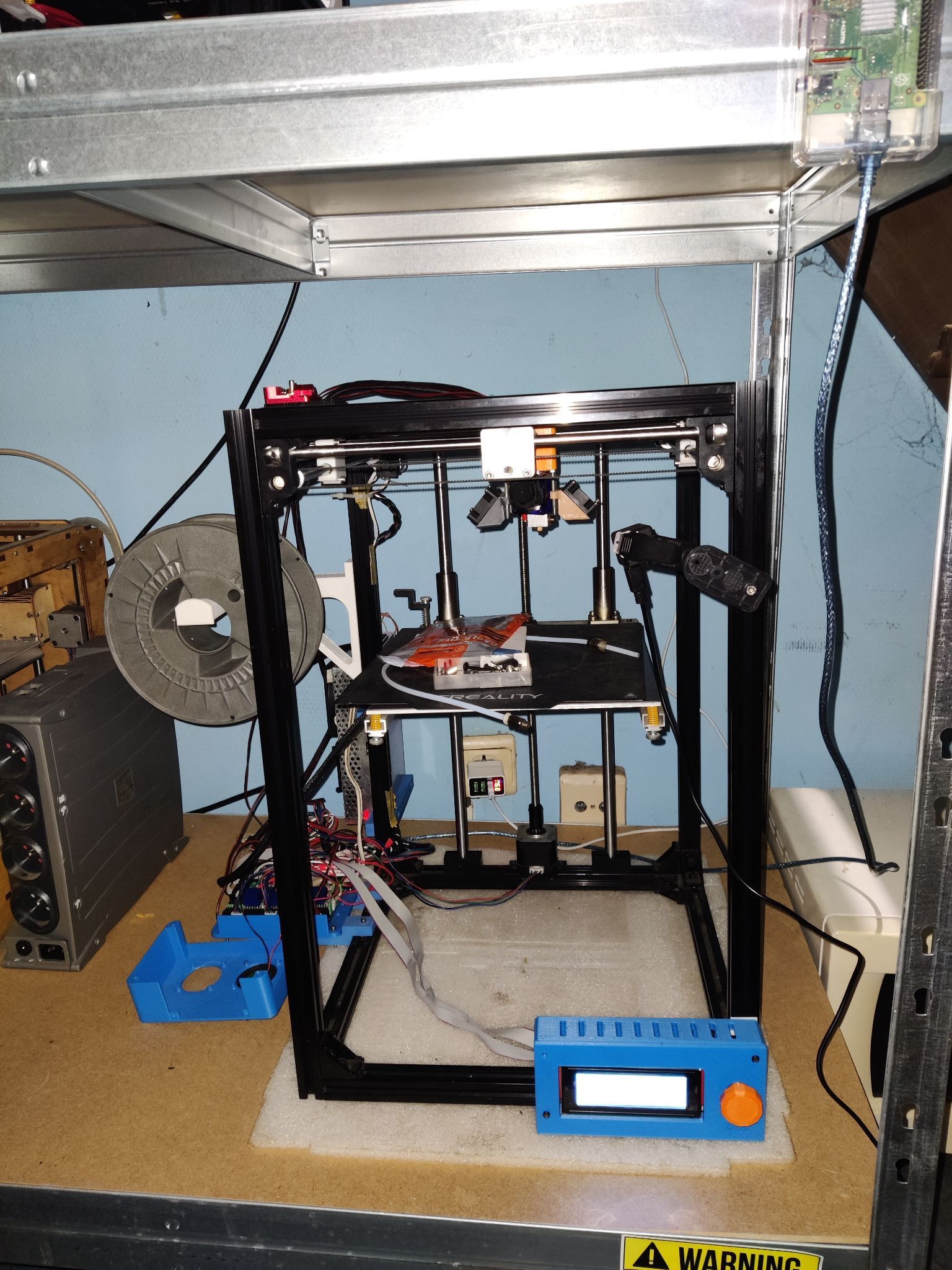
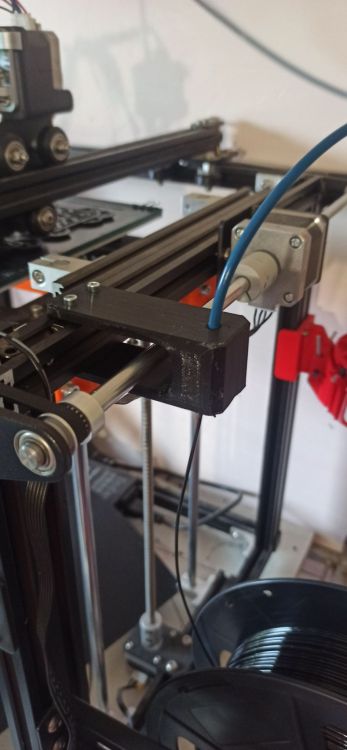
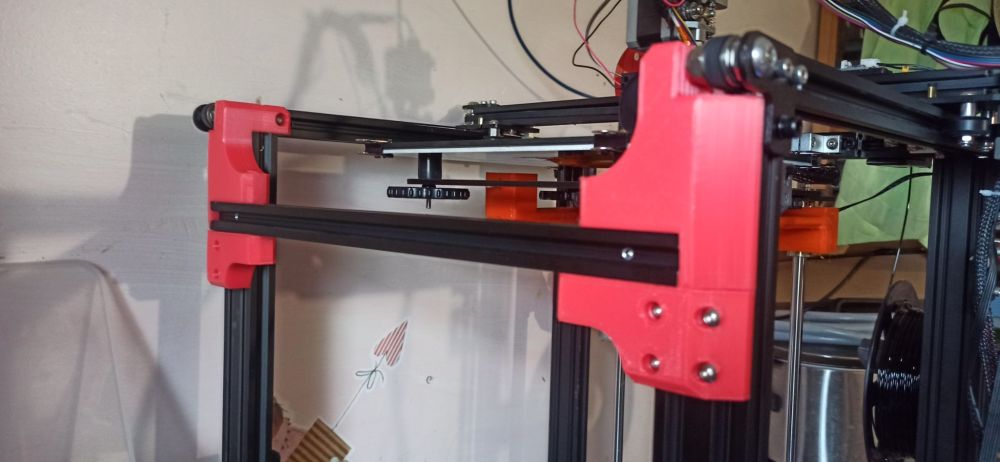
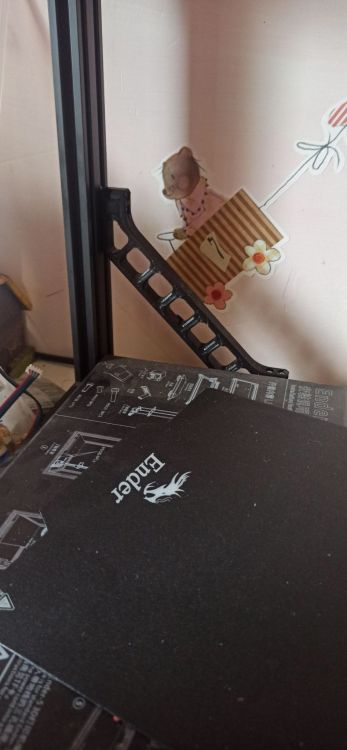
Salut à tous, Un certains temps que je n'étais pas revenu discuté avec vous, mais je me suis dis que partagé l'évolution de mon imprimante. Bon au départ, je voulais mettre de coté pour m'offrir une VORON, mais économisé pendant 2 ans n'est pas forcément simple du coup je me suis dis qu'en tant que concepteur, ce serait con de pas me lancer dans un chantier qui va pouvoir occuper mes longues soirées d'hiver sous la pluie (vive la Normandie) pour concevoir et imprimer l'évolution de mon imprimante. Alors dans tout les cas si ça marche pas bien ce sera de ma faute mais j'aurais au moins le plaisir d'avoir tout conçu. J'ai commencé par le guidage du fil, j'ai remplacé le support bobine qui laisse glisser la bobine par un modèle sur roulement. l'idée originale était https://www.thingiverse.com/thing:6407047 et je l'ai modifié pour le monter sur les creality avec leur écrou https://www.thingiverse.com/thing:6454319. Bon faut que je reprenne les rainures qui sont parfaitement dans l'axe alors qu'en réalité il y a un serrage lorsque on tourne l'écrou. bon j'ai compensé un mettant une rondelle de carton mais une fois modifiée, la pièce aura un comportement conforme à l'originale. Ensuite, bah défaut des creality ender 5 passée en direct drive, le fil est tendu et suit la tête d'impression et sort du support. sur le modèle d'origine, on a des pinces mais la sur la version à roulement bah ça marche pas. Du coup, j'ai fait une pièce qui guide le fil et envoie le fil dans un tube directement vers l'extrudeur. J'ai aussi ajouté des renforts croisillons pour améliorer la rigidité On remarquera la magnifique tapisserie de l'ancienne chambre de ma fille.. . Et enfin, j'ai baissé la poutrelle avant afin de libérer un peu d'espace en partie avant, pour mieux voir mais aussi pour avoir plus de dégagement à l'avant si je décidé de modifié la tête. Voilà pour les modifs actuelles, je prépare des pieds et une jupe en partie basse comme les voron et aussi pour avoir un accès à l'électronique. Concernant l'impression, j'ai fait un gros gap en avant sur la qualité et la vitesse en réglant quelques paramétres mais l'amélioration la plus flagrante et la modification des accélérations de base de la machines, aujourd'hui, sur des impressions en PETG, à 225°C buse stock, je tourne à 100mm/s avec des accélérations de 1500mm/s² en impression et une épaisseur de couche de 0.3mm. Passé sur du 0.3 m'a permis d'avoir aussi une bien meilleure accroche de première couche, avant elles étaient clairement moins adhérentes. La suite concernera un passage sous klipper mainsail et la préparation d'un gantry Core XY inspiré par les plus connus actuellement à savoir VORON, MERCURY et VZBOT. Le tout avec une tête avec sherpa mini et hotend dragon ace de trianglelab. A plus

-

klipper Problème avec MCU en Canbus : Timer too close
PierreG a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à vous.... Depuis plusieurs jours, je recois une erreur lors de mes impressions: "MCU 'CanBus' shutdown: Timer too close" Le Canbus en question est ma tete stealthburner qui est drivé par un EBB SB2209, branché à un module U2C, lui-même branché en USB à mon RPi. D'apres plusieurs lecture trouvée sur le web, ca peut etre causé par une surcharge de mon RPi, ou d'un problème de communication (coupures). J'ai vérifié la charge du RPi sur Fluidd, et je nai jamais atteint plus de 3% avant le shutdown. Ma carte SD est à 50% (16Go). J'ai essayé de changer le sports USB, ou cas où ca serait dû à un faux contact du connecteur. Je ne sais donc plus trop quoi vérifier. Si quelqu'un a une ou des pistes, je suis preneur !!! Je joins mon fichier klippy.log. Merci à l'avance. klippy.log.txt -
J'ai passé mon dépôt Github concernant mes recherches, modifications, ajouts, réflexions sur ce matériel de «privé» à public. Pour ceux que ça intéresse, c'est >>> ici <<<. Rappel: «à grands pouvoirs, grandes responsabilités» ( root )
-
klipper Mise à jour Klipper sur mon SB2209
PierreG a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonne journée à vous les amis... Il y a eu une mise à jour récente de Klipper, qui est passée de la version 0.11 à 0.12 je crois. J'ai mis ma Voron à jour, mais je recois le message que mes deux MCU (carte mère Octopus et SB2209) doivent également être mis à jour. Pour ce qui est de la carte mere, ca se passe très bien... je recompile un klipper.bin, je le met sur une carte SD, et je redémarre ma carte sur la carte SD... Bingo, c'est réglé. Mais pour mon SB2209, qui est branché à mon Pi via un U2C, ca ne passe pas comme lettre à la poste. J'aimerais bien pouvoir le mettre à jour en utilisant la liaison Canbus mais après plusieurs essai, ca ne fonctionne pas. J'ai tenté cette procédure : https://github.com/Esoterical/voron_canbus/blob/main/Updating.md#updating-toolhead-klipper Ca semble assez complet, mais je n'arrive pas à flasher le SB2209. Quelqu'un a-til déjà réussi à flasher de cette facon ?? Merci d'avance !! -
 Bonjour la comu J'en suis à ma premiere impression pour regler le z offset. J'utilise orcaslicer et klipper. Dés le lancement de mon impression et après un retour à home j'ai le message d'erreur suivant qui s'affiche : Move exceeds maximum extrusion (1.002mm^2 vs 0.640mm^2) Je pense que le probleme se situe dans mon gcode de démarrage puisqu'il ne se réalise pas complétement : G90 ;Use absolute coordinates M83 ;Extruder relative mode M104 S[first_layer_temperature] ;Set extruder temp M140 S[first_layer_bed_temperature] ;Set bed temp M190 S[first_layer_bed_temperature] ;Wait for bed temp M109 S[first_layer_temperature] ;Wait for extruder temp G28 ;Move X/Y/Z to min endstops G1 Z0.28 ;Lift nozzle a bit G92 E0 ;Specify current extruder position as zero G1 Y3 F1800 ;Move Y to purge point G1 X60 E25 F500 ;Extrude 25mm of filament in a 5cm line G92 E0 ;Zero the extruded length again G1 E-2 F500 ;Retract a little G1 X70 F4000 ;Quickly wipe away from the filament line M117 et voici mon config.cfg : [stepper_x] step_pin: PA12 dir_pin: PA11 enable_pin: !PA15 microsteps: 16 rotation_distance: 40 endstop_pin: !PH2 position_endstop: -13 position_min:-13 position_max: 236 homing_speed: 50 [stepper_y] step_pin: PA9 dir_pin: PA8 enable_pin: !PA15 microsteps: 16 rotation_distance: 40 endstop_pin: ^!PC13 position_endstop: -9 position_min:-9 position_max: 230 homing_speed: 50 [stepper_z] step_pin: PC7 dir_pin: !PC6 enable_pin: !PA15 microsteps: 16 rotation_distance: 8 endstop_pin: ^PC14 #position_endstop: 0 position_min: -10 position_max: 255 homing_speed: 5 [extruder] step_pin: PB15 dir_pin: !PB14 enable_pin: !PA15 microsteps: 16 rotation_distance: 31.07 max_extrude_only_velocity: 25 max_extrude_only_accel: 1000 nozzle_diameter: 0.400 filament_diameter: 1.750 heater_pin: PB8 sensor_type: ATC Semitec 104GT-2 sensor_pin: PC3 min_extrude_temp: 170 min_temp: 0 max_temp: 250 #control: pid #pid_kp: 19.56 #pid_ki: 1.62 #pid_kd: 200.00 [heater_bed] heater_pin: PB9 sensor_type: EPCOS 100K B57560G104F sensor_pin: PC1 min_temp: 0 max_temp: 120 #control: pid #pid_kp: 97.1 #pid_ki: 1.41 #pid_kd: 1675.16 [bed_mesh] speed: 200 horizontal_move_z: 2.5 mesh_min: 34, 34 mesh_max: 200, 200 probe_count: 5, 5 [probe] pin: PA1 x_offset: 33 y_offset: 0 #z_offset: 0 samples: 3 samples_result: average samples_tolerance_retries: 3 sample_retract_dist: 0.5 speed: 2 lift_speed: 4 [safe_z_home] home_xy_position: 0, 0 speed: 5 z_hop: 10 z_hop_speed: 15 [controller_fan controller_fan] pin: PB12 [heater_fan extruder_fan] pin: PB13 [fan] pin: PB5 cycle_time: 0.00005 #20kHz [output_pin enable_pin] pin: PB6 static_value: 1 #This pin enables the bed, hotend, extruder fan, part fan. [mcu] serial: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 restart_method: command [printer] kinematics: cartesian max_velocity: 300 max_accel: 500 max_z_velocity: 4 max_z_accel: 100 #*# <---------------------- SAVE_CONFIG ----------------------> #*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated. #*# #*# [extruder] #*# control = pid #*# pid_kp = 22.618 #*# pid_ki = 1.012 #*# pid_kd = 126.379 #*# #*# [heater_bed] #*# control = pid #*# pid_kp = 62.646 #*# pid_ki = 1.108 #*# pid_kd = 885.662 #*# #*# [probe] #*# z_offset = 0.051 #*# #*# [stepper_z] #*# position_endstop = 5.158 #*# #*# [bed_mesh default] #*# version = 1 #*# points = #*# -0.384667, -0.381333, -0.384667, -0.398833, -0.343833 #*# -0.313833, -0.293000, -0.287167, -0.286333, -0.269667 #*# -0.372167, -0.322167, -0.308000, -0.277167, -0.233833 #*# -0.330500, -0.330500, -0.309667, -0.282167, -0.228833 #*# -0.351333, -0.332167, -0.307167, -0.283833, -0.220500 #*# x_count = 5 #*# y_count = 5 #*# mesh_x_pps = 2 #*# mesh_y_pps = 2 #*# algo = lagrange #*# tension = 0.2 #*# min_x = 34.0 #*# max_x = 200.0 #*# min_y = 34.0 #*# max_y = 200.0
Bonjour la comu J'en suis à ma premiere impression pour regler le z offset. J'utilise orcaslicer et klipper. Dés le lancement de mon impression et après un retour à home j'ai le message d'erreur suivant qui s'affiche : Move exceeds maximum extrusion (1.002mm^2 vs 0.640mm^2) Je pense que le probleme se situe dans mon gcode de démarrage puisqu'il ne se réalise pas complétement : G90 ;Use absolute coordinates M83 ;Extruder relative mode M104 S[first_layer_temperature] ;Set extruder temp M140 S[first_layer_bed_temperature] ;Set bed temp M190 S[first_layer_bed_temperature] ;Wait for bed temp M109 S[first_layer_temperature] ;Wait for extruder temp G28 ;Move X/Y/Z to min endstops G1 Z0.28 ;Lift nozzle a bit G92 E0 ;Specify current extruder position as zero G1 Y3 F1800 ;Move Y to purge point G1 X60 E25 F500 ;Extrude 25mm of filament in a 5cm line G92 E0 ;Zero the extruded length again G1 E-2 F500 ;Retract a little G1 X70 F4000 ;Quickly wipe away from the filament line M117 et voici mon config.cfg : [stepper_x] step_pin: PA12 dir_pin: PA11 enable_pin: !PA15 microsteps: 16 rotation_distance: 40 endstop_pin: !PH2 position_endstop: -13 position_min:-13 position_max: 236 homing_speed: 50 [stepper_y] step_pin: PA9 dir_pin: PA8 enable_pin: !PA15 microsteps: 16 rotation_distance: 40 endstop_pin: ^!PC13 position_endstop: -9 position_min:-9 position_max: 230 homing_speed: 50 [stepper_z] step_pin: PC7 dir_pin: !PC6 enable_pin: !PA15 microsteps: 16 rotation_distance: 8 endstop_pin: ^PC14 #position_endstop: 0 position_min: -10 position_max: 255 homing_speed: 5 [extruder] step_pin: PB15 dir_pin: !PB14 enable_pin: !PA15 microsteps: 16 rotation_distance: 31.07 max_extrude_only_velocity: 25 max_extrude_only_accel: 1000 nozzle_diameter: 0.400 filament_diameter: 1.750 heater_pin: PB8 sensor_type: ATC Semitec 104GT-2 sensor_pin: PC3 min_extrude_temp: 170 min_temp: 0 max_temp: 250 #control: pid #pid_kp: 19.56 #pid_ki: 1.62 #pid_kd: 200.00 [heater_bed] heater_pin: PB9 sensor_type: EPCOS 100K B57560G104F sensor_pin: PC1 min_temp: 0 max_temp: 120 #control: pid #pid_kp: 97.1 #pid_ki: 1.41 #pid_kd: 1675.16 [bed_mesh] speed: 200 horizontal_move_z: 2.5 mesh_min: 34, 34 mesh_max: 200, 200 probe_count: 5, 5 [probe] pin: PA1 x_offset: 33 y_offset: 0 #z_offset: 0 samples: 3 samples_result: average samples_tolerance_retries: 3 sample_retract_dist: 0.5 speed: 2 lift_speed: 4 [safe_z_home] home_xy_position: 0, 0 speed: 5 z_hop: 10 z_hop_speed: 15 [controller_fan controller_fan] pin: PB12 [heater_fan extruder_fan] pin: PB13 [fan] pin: PB5 cycle_time: 0.00005 #20kHz [output_pin enable_pin] pin: PB6 static_value: 1 #This pin enables the bed, hotend, extruder fan, part fan. [mcu] serial: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 restart_method: command [printer] kinematics: cartesian max_velocity: 300 max_accel: 500 max_z_velocity: 4 max_z_accel: 100 #*# <---------------------- SAVE_CONFIG ----------------------> #*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated. #*# #*# [extruder] #*# control = pid #*# pid_kp = 22.618 #*# pid_ki = 1.012 #*# pid_kd = 126.379 #*# #*# [heater_bed] #*# control = pid #*# pid_kp = 62.646 #*# pid_ki = 1.108 #*# pid_kd = 885.662 #*# #*# [probe] #*# z_offset = 0.051 #*# #*# [stepper_z] #*# position_endstop = 5.158 #*# #*# [bed_mesh default] #*# version = 1 #*# points = #*# -0.384667, -0.381333, -0.384667, -0.398833, -0.343833 #*# -0.313833, -0.293000, -0.287167, -0.286333, -0.269667 #*# -0.372167, -0.322167, -0.308000, -0.277167, -0.233833 #*# -0.330500, -0.330500, -0.309667, -0.282167, -0.228833 #*# -0.351333, -0.332167, -0.307167, -0.283833, -0.220500 #*# x_count = 5 #*# y_count = 5 #*# mesh_x_pps = 2 #*# mesh_y_pps = 2 #*# algo = lagrange #*# tension = 0.2 #*# min_x = 34.0 #*# max_x = 200.0 #*# min_y = 34.0 #*# max_y = 200.0 -
klipper Probleme de nivellement du lit : z trop bas
cybernino a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour la comu Je suis en train d'installer klipper et j'en suis à la calibration du z et de ma sonde. J'ai bien suivi le tuto de klipper en faisant le nivellement de ma sonde, mais malgré cela lorsque je lance le nivellement du lit, la sonde descend trop bas et fait s'écraser ma tete d'extrusion sur le lit, bloquant les moteurs et la procédure en cours. Je n'arrive pas à comprendre pourquoi. Pouvez vous m'aider ? -

klipper Bigtreetech pad 7
Julien-Stalk a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Salut , a tout le monde . J'ai fait l'acquisition d'un pad 7 la sa fait 30 mn que je commence a le mettre en route sauf que j'ai juste le imput shaper ou je suis bloqué car des que je mes les ligne donner sur la notice [mcu CB1] serial : /tmp/klipper_host_mcu [adxl345] cs_pin: CB1:None spi_bus: spidev1.1 axes_map: z,y,-x du coup je mais le tout , sauf que une fois tout cela de mis mais erreur cs_pin (CB1) du coup avant de venir poster ici je suis allez faire ma recherché sur le net en anglais et en français bais comment dire ils y a rien sur les setting adxl345 spider v1 bigtreetech si il y a une personne super aimable qui pourrais m'aider klippy.zip printer.cfg.zip
-
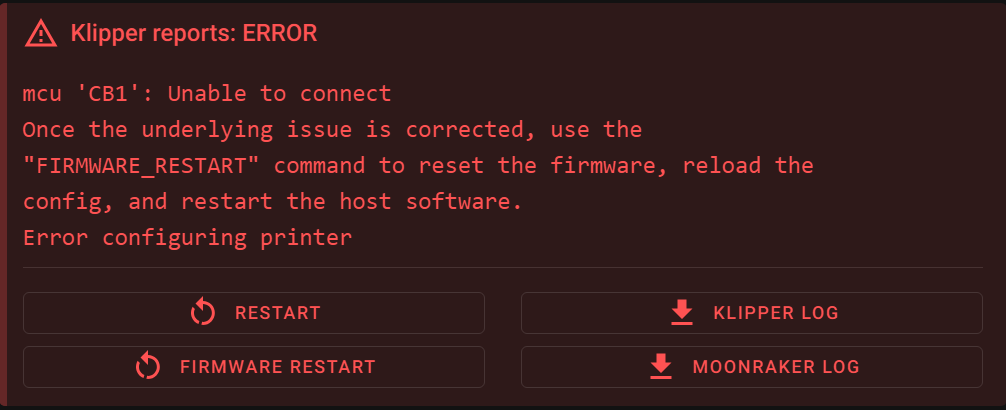
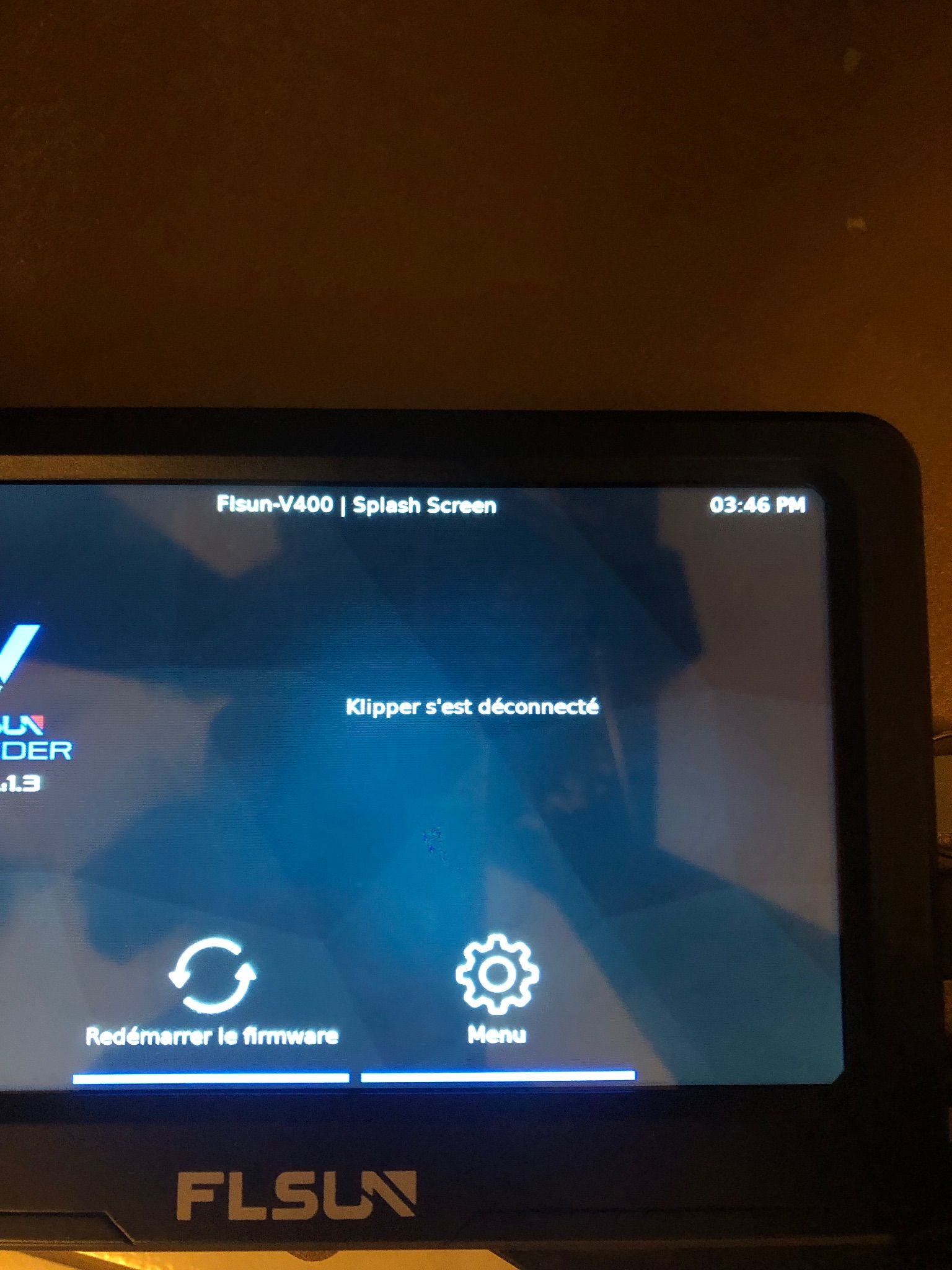
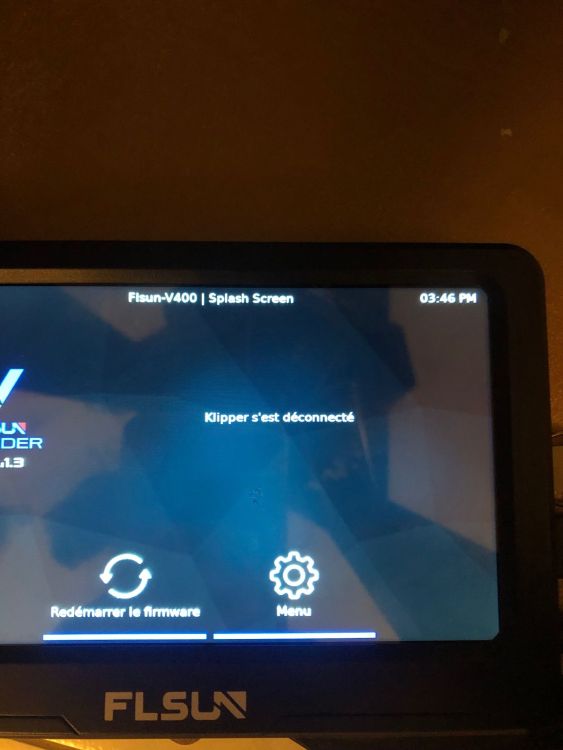
Bonjour à tous je viens vers vous pour solliciter votre aide , je suis complètement perdu , pouvez vous m’aider à régler cette erreur de Klipper , mon imprimante(flsun v400) ne démarre plus . Et le pad m’indique ce message, que dois je faire ? Bien cordialement
-

Problèmes installation Klipper Ultimaker 2 extended (MKS GEN V.2.1)
kevsparta23 a posté un sujet dans Ultimaker
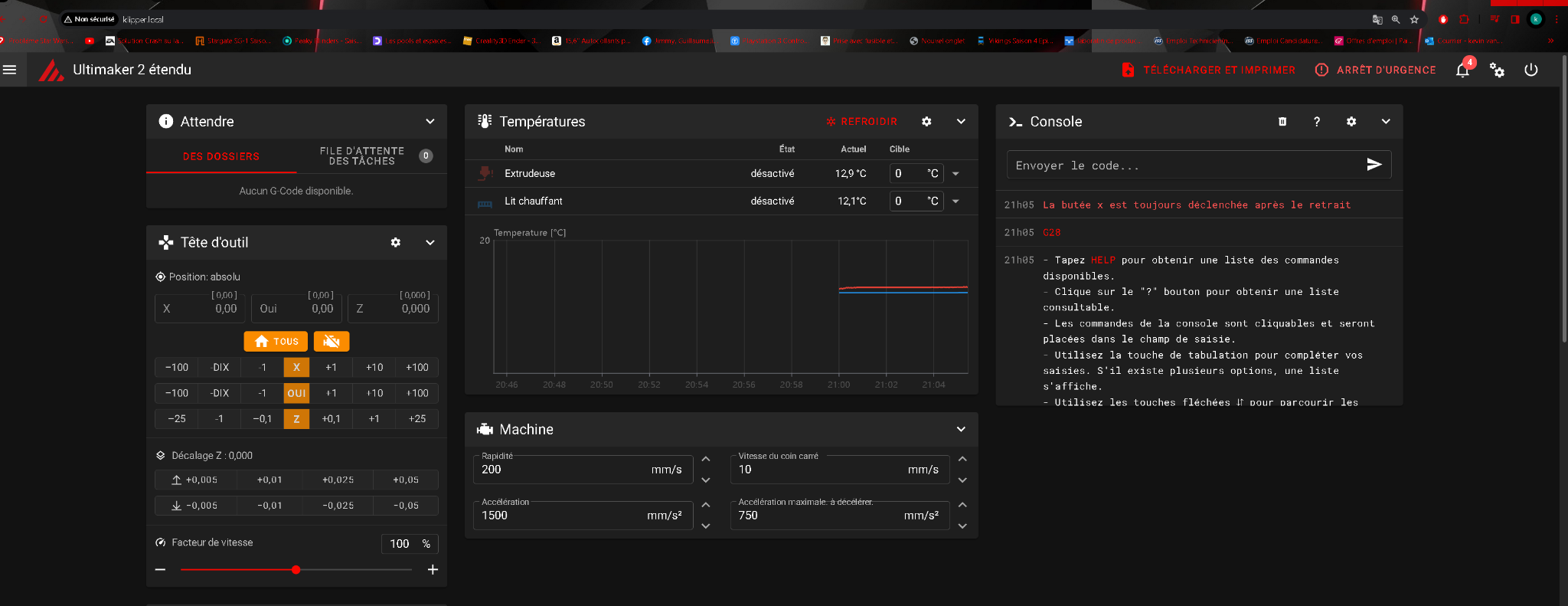
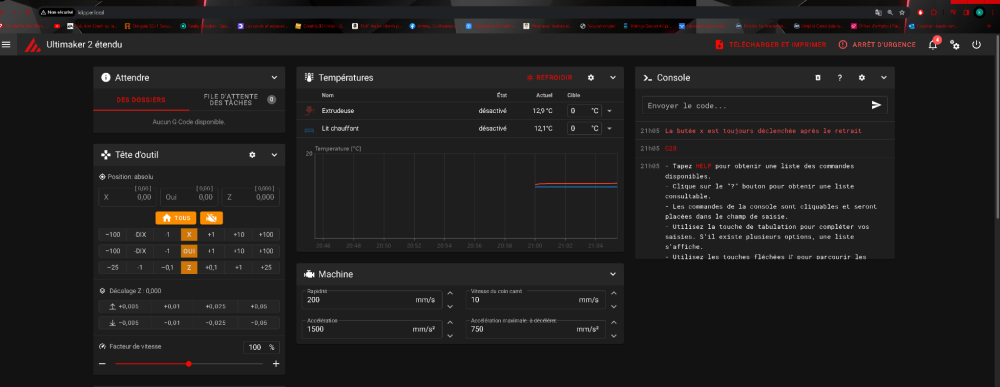
Bonsoir a tous. J'espère trouvé de l'aide et des réponses ici. Je possède un clone Utimaker 2 Extended avec une carte MKS Gen 2.1 tmc2209. J'ai su tout configurer pour Klipper (ma première fois donc pas vraiment évident) la tête répond a la chauffe, pareil pour le Bed mais des que demande de faire un auto home, il n'y a que l'axe x qui se déplace de 1cm vers la gauche avec le message d'erreur "La butée x est toujours déclenchée après le retrait" Quand je lui demande par exemple de déplacer l'axe Z de 1 cm, a ce moment la je me retrouve avec cette erreur ci : "Doit être l'axe d'origine en premier : 10,000 0,000 0,000 [0,000] j'ai fais mes petites recherches de mon côté mais rien de concluant... peut être une erreur dans mon printer.cfg En èspèrant avoir des conseils car je suis un peu perdu sur le coup


-

petit decalage couche
Poisson21 a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Hello tout le monde, j'ai un petit souci depuis que je suis passer sous klipper (n'existait pas sous marlin). Suivant la géométrie des pièces je me retrouve avec des petits décalages de couches (- de 0.1mm) sur X, sur un changement de forme (un trou par exemple) le décalage se produit et quand ce changement de forme s'arrête, le décalage s'arrête aussi. J'ai fouiller dans les G-code mais tous ce que je trouve c'est que la position cible est la même. Donc qu'est ce qui pourrait provoquer ça. Sur la photo, l'impression de décalage est très exagérer, il est de moins de 0.1 mm et ne gêne pas plus que ça.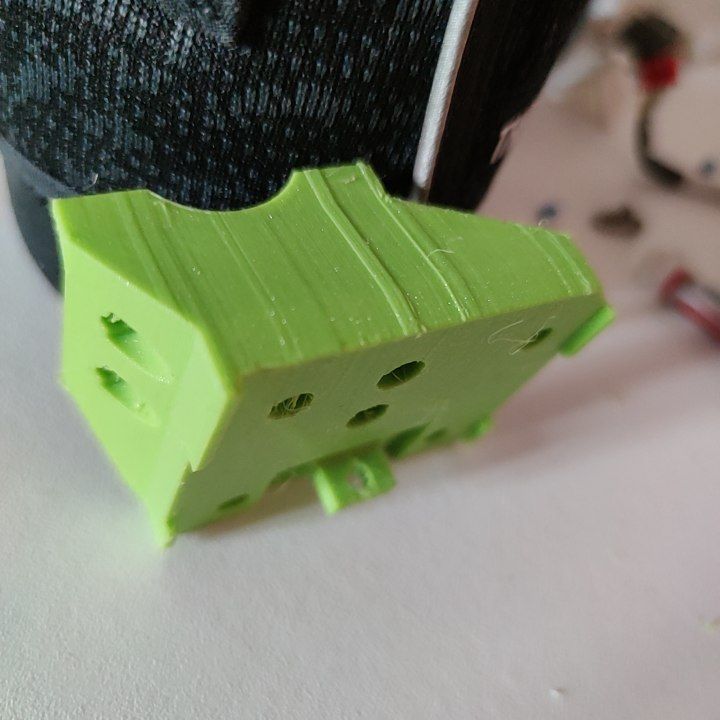
-
Bonjour à tous, Je rencontre un problème en ce moment avec ma nouvelle installation de klipper, mainsail et OrcaSlicer. Après quelques souci de compréhension concernant les macro, tout fonctionne bien dorénavant.impression de benchy et cube pour la calibration: on est bon. Je m'attaque maintenant au Pressure advance mais pour une raison qui m'échappe klipper me renvoi une erreur. Tout d'abord: - je suis obligé de chauffer le plateau et la buse manuellement sinon klipper renvoi l'erreur "extruder not hot enough" pourtant dans ma macro start_print je demande bien la chauffe et cela fonctionnait pour les autres fichier avant (benchy cube etc...) -Je rentre donc la température manuellement, l'imprimante fais son G28 mais reste en butée en X et Y et me renvoi l'erreur "Must home axis first: 220.000 220.000 0.163 [-23.000]" J'ai beau tenté de refaire le homing cela me renvoi toujours à cette erreur et je ne trouve pas d'info sur le net. Voilà ma macro start modifié avec les variable de température plutôt que des température fixe que j’utilisais avant (seul modification effectué depuis l’impression des benchy ainsi que le z offset [gcode_macro START_PRINT] #variable_T_BED: 60 #variable_T_EXTRUDER: 200 #variable_STANDBY_T_EXTRUDER: 170 gcode: {% set T_BED = params.T_BED|default(60)|float %} {% set T_EXTRUDER = params.T_EXTRUDER|default(200)|float %} {% set STANDBY_T_EXTRUDER = params.STANDBY_T_EXTRUDER|default(170)|float %} gcode: M82 ;absolute extrusion mode BED_MESH_PROFILE LOAD=E5Pklipp # Home the printer G28 # Move the nozzle near the bed G1 X15 Y20 Z5 F6000 # Move the nozzle very close to the bed G1 Z0.15 F300 M117 Waiting for temperature # Start bed and extruder heating and continue M104 S{STANDBY_T_EXTRUDER} M140 S{T_BED} {% if printer.heater_bed.temperature < params.T_BED|float*0.85 %} M190 S{params.T_BED|float*0.85} # wait till 0.85 of bed temp is reached, then continue {% endif %} M140 S{T_BED} M104 S170 M190 S{T_BED} M109 S{T_EXTRUDER} G90 ; Absolute position G92 E0 ;Reset Extruder G1 Z2.0 F3000 ;Move Z Axis up G1 X10.1 Y20 Z0.28 F5000.0 ;Move to start position G1 X10.1 Y200.0 Z0.28 F1500.0 E15 ;Draw the first line G1 X10.4 Y200.0 Z0.28 F5000.0 ;Move to side a little G1 X10.4 Y20 Z0.28 F1500.0 E30 ;Draw the second line G92 E0 ;Reset Extruder G1 E-2 F1800 ;retract 2mm at 30mm/s G1 Z2.0 F3000 ; Move Z Axis up little to prevent scratching of Heat Bed G1 E1.8 F1800 ;retract 2mm at 30mm/s G92 E0 G1 F2700 E-5 et voici mon start gcode dans OrcaSlicer. START_PRINT T_BED=[first_layer_bed_temperature] T_EXTRUDER=[first_layer_temperature] Si vous pouviez éclairé ma lanterne ce serait top car je nage en eau trouble ^^ En vous remerciant d'avance
-
Bonjour, Je vends mon Sonic PAD creality. Initialement connecté a mon ENDER 3 V2 Neo, il fonctionne avec tout modèle d'imprimante, meme d'une autre marque grâce a Klipper. Il a une valeur neuve de 179 Euros et il est vendu 100 €uros. Il a fonctionné environ 1 mois avant que je passe a la FLSUN V400. Entièrement fonctionnel et sans rayure, il est vendu dans sa boite d'origine et avec sa facture. Il est donc encore garanti puisque acheté en Mai 2023.

-
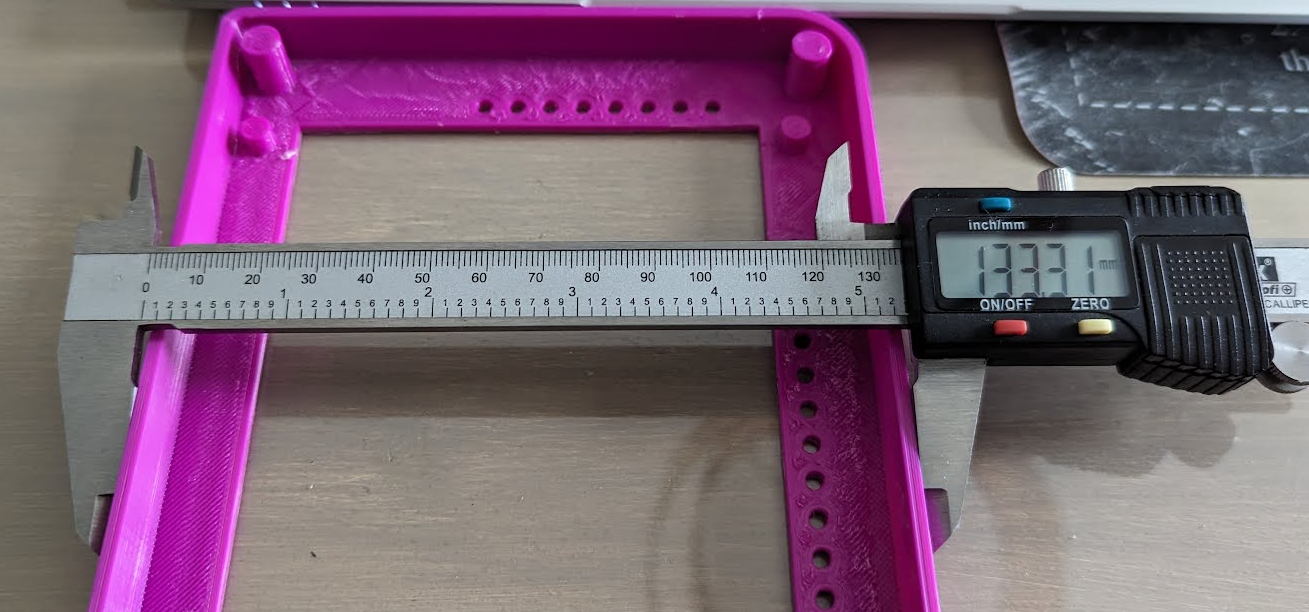
 Salut. J'ai imprimé un dashboard pour mon simracing mais dans Onshape, j'ai demandé 138mm et une fois imprimé, je me retrouve avec 133mm sur l'axe Y : Mais après une rapide recherche, contrairement à Marin, pas de correction de moteur comme avec l'extrudeur. Donc j'ai retendu les courroies mais y a t'il d'autres choses à faire ? Dans mon printer.cfg, j'ai rotation_distance: 32 Car poulie de 16 dents et courroie de 2mm Les drivers sont des TMC2209 et ils sont configurés de cette manière : run_current: 0.800 hold_current: 0.500 stealthchop_threshold: 500
Salut. J'ai imprimé un dashboard pour mon simracing mais dans Onshape, j'ai demandé 138mm et une fois imprimé, je me retrouve avec 133mm sur l'axe Y : Mais après une rapide recherche, contrairement à Marin, pas de correction de moteur comme avec l'extrudeur. Donc j'ai retendu les courroies mais y a t'il d'autres choses à faire ? Dans mon printer.cfg, j'ai rotation_distance: 32 Car poulie de 16 dents et courroie de 2mm Les drivers sont des TMC2209 et ils sont configurés de cette manière : run_current: 0.800 hold_current: 0.500 stealthchop_threshold: 500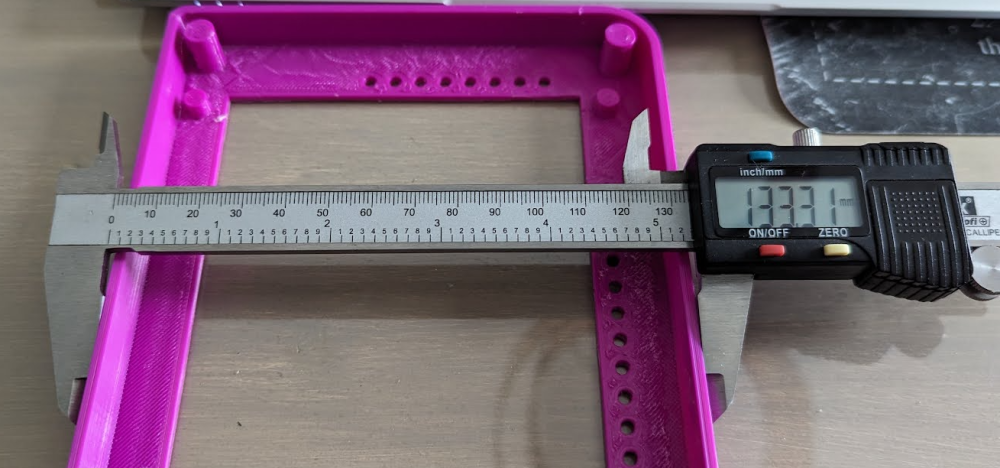
-
 Bonjour, Toujours dans la démarche de faire avancer mon Ender 3 et afin de gagner un peu en rapidité, je me demande s'il est possible de passer de Marlin à Klipper. J'ai fait pas mal de recherches sans être véritablement éclairé pour autant; l'avalanche d'infos du net est assommante ! Les caractéristiques de ma machine sont dans mon profil. Est il possible de passer à Klipper en gardant ma carte mère, ou bien faut-il un modèle plus performant (un modèle de Bigtreetech par ex.). J'aimerais bien garder Octoprint (à cause des plugins principalement) pour le contrôle à distance. Si c'est possible: - Faut il changer l'écran de contrôle (d'origine)? Je ne suis pas trop fan du tactile, j'aime bien les boutons physiques. - Klipper propose-t-il un équivalent de l'assistant molettes de Marlin (je l'utilise à chaque impression) - Mon imprimante étant bricolée, de quel modèle se rapproche-t-elle le plus? (pro, V2, autre?). Ceci pour étudier des scripts de configurations "pré-mâchés" - solution peu pédagogique certes mais apportant des bases. Je n'ai pas les moyens pour la Switchwire mais je compte rigidifier la structure au fil du temps, et aller dans ce sens suivant les finances..... Voilou, merci pour vos conseils
Bonjour, Toujours dans la démarche de faire avancer mon Ender 3 et afin de gagner un peu en rapidité, je me demande s'il est possible de passer de Marlin à Klipper. J'ai fait pas mal de recherches sans être véritablement éclairé pour autant; l'avalanche d'infos du net est assommante ! Les caractéristiques de ma machine sont dans mon profil. Est il possible de passer à Klipper en gardant ma carte mère, ou bien faut-il un modèle plus performant (un modèle de Bigtreetech par ex.). J'aimerais bien garder Octoprint (à cause des plugins principalement) pour le contrôle à distance. Si c'est possible: - Faut il changer l'écran de contrôle (d'origine)? Je ne suis pas trop fan du tactile, j'aime bien les boutons physiques. - Klipper propose-t-il un équivalent de l'assistant molettes de Marlin (je l'utilise à chaque impression) - Mon imprimante étant bricolée, de quel modèle se rapproche-t-elle le plus? (pro, V2, autre?). Ceci pour étudier des scripts de configurations "pré-mâchés" - solution peu pédagogique certes mais apportant des bases. Je n'ai pas les moyens pour la Switchwire mais je compte rigidifier la structure au fil du temps, et aller dans ce sens suivant les finances..... Voilou, merci pour vos conseils -

LK4 Pro problème sondes température
teba38 a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Aujourd'hui, j'essaie de résoudre un problème sur mon imprimante, un lk4 pro tournant sous Klipper. Il y a quelques jours j'ai installé un extrudeur biqu v2s et tout fonctionnait à merveille. Hier, j'ai installé un bl touch (un vrai) tout va bien il fonctionne bien, j'ai donc voulu lancer une impression et l'extrudeur était bouché. Pas de problème, je débouche et remonte le tout, mais depuis les températures ne sont plus du tout cohérentes (peut-être avant le bouchon mais pas avant l'installation du bl touch). Les deux capteurs (extrudeur et bed) indiquent environ 50°C pour une température ambiante de 23°C. J'ai tout essayé : vérifier le câblage, tester les paramètres (tous les types de capteurs) du fichier printer.cfg, tester ma thermistance avec un multimètre et rien n'y fait. Pour info : le pid de l'extrudeur et bed ont étés faits, l'extrudeur est calibré et les deux thermistance renvoient une valeur d'environ 100k ohm avec le multimètre. Je ne sais plus quoi faire maintenant, j'espère juste que quelqu'un ici pourra m'aider ou au moins me donner une direction. Merci d'avance. -

Calibrating probe Z offset
RicoDarksky a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Slt, je suis en conflit avec le "Calibrating probe Z offset" j'ai cherché un peu partout sans résultat je ne comprends pas comment corriger le problème PROBE_CALIBRATE que j'ai suivi sur klipper3d cela me fait à chaque fois une erreur : Option 'z_offset' in section 'bltouch' must be specified [bltouch] sensor_pin: ^PB1 control_pin: PB0 x_offset: -39 y_offset: 0 ---> #z_offset: 0 <--- samples: 2 speed: 5 Avez-vous une idée ? Merci klippy(1).txt -
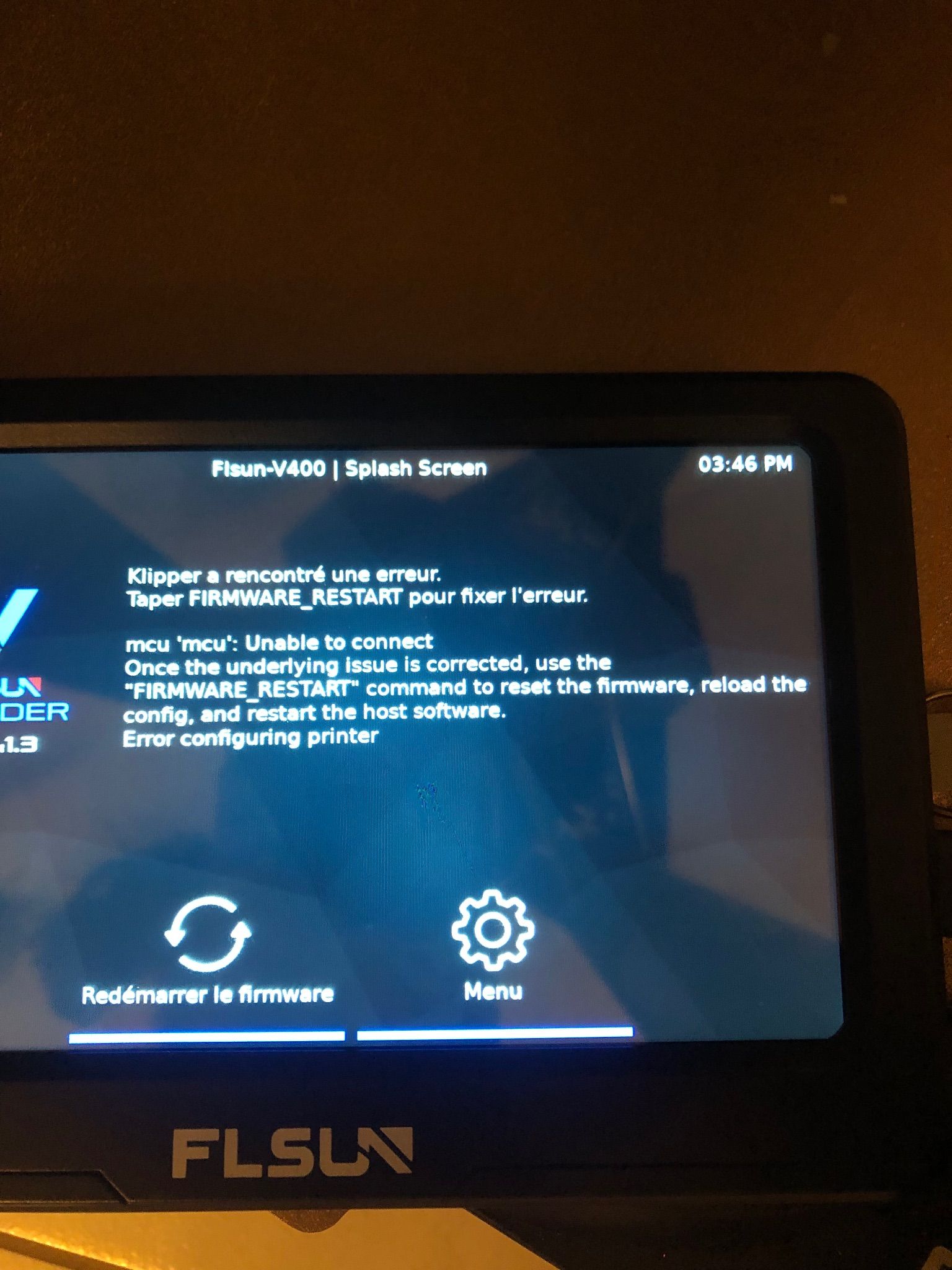
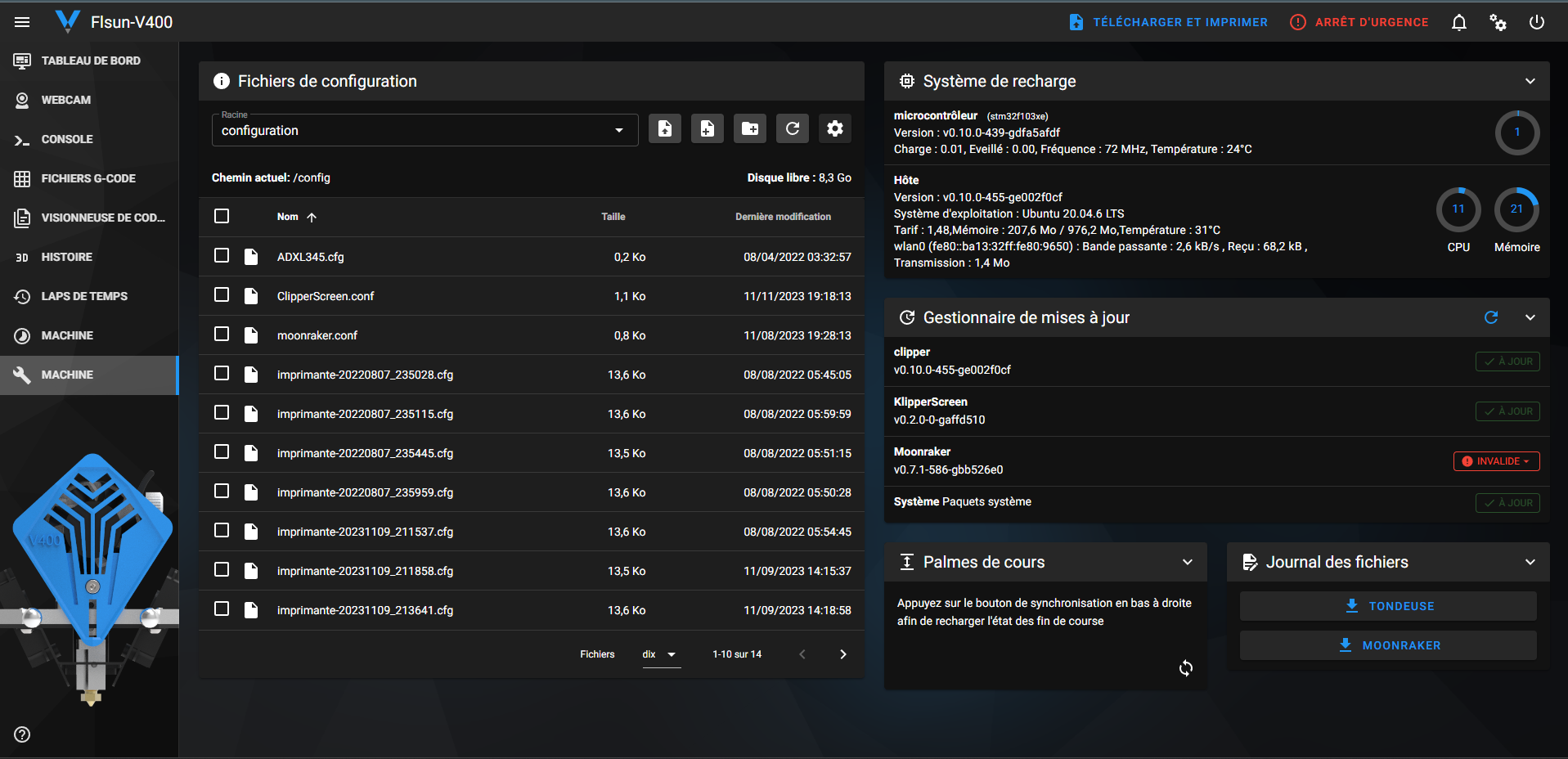
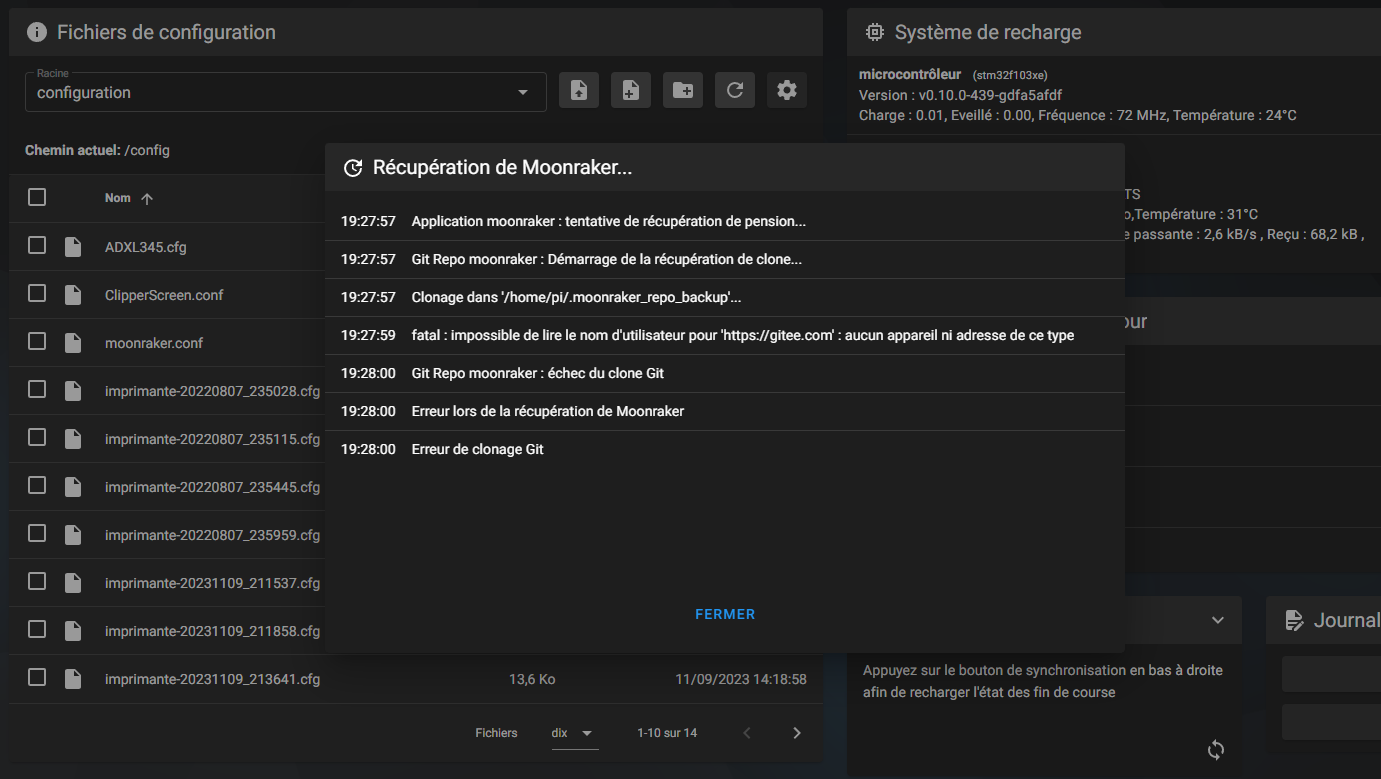
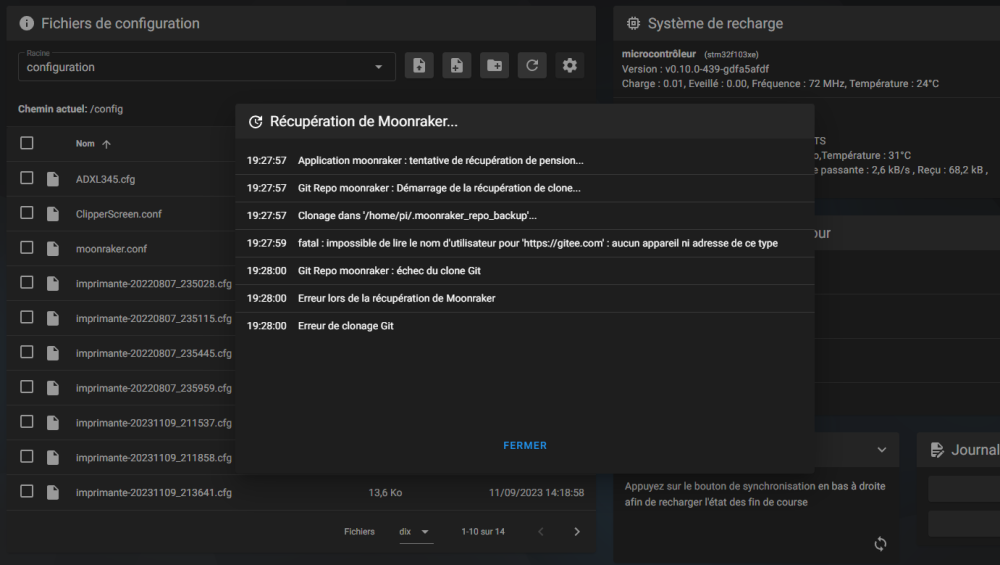
 Bonjour, j'ai un probleme sur ma Flsun v400... J'ai acheté une flsun v400 il y a 10 jours, et hier j'ai voulu voir les mises a jour et j'ai vu que moonraker était à mettre à jour. J'ai donc voulu mettre à jour sauf que ca ne marche pas VOIR LA PHOTO. pouvez vous me dire une solution à mon problème ? Merci d'avance ! Yannis
Bonjour, j'ai un probleme sur ma Flsun v400... J'ai acheté une flsun v400 il y a 10 jours, et hier j'ai voulu voir les mises a jour et j'ai vu que moonraker était à mettre à jour. J'ai donc voulu mettre à jour sauf que ca ne marche pas VOIR LA PHOTO. pouvez vous me dire une solution à mon problème ? Merci d'avance ! Yannis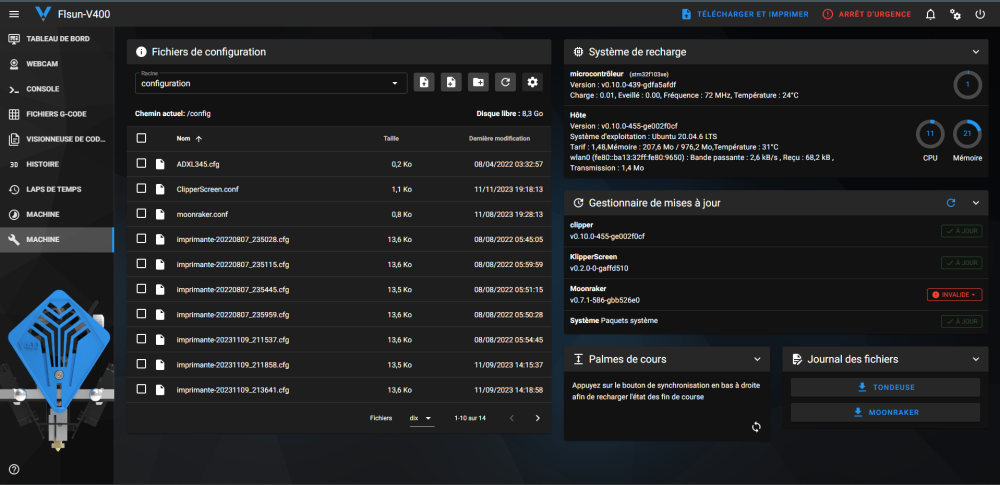
-
Hello ! Je débute complétement sur Klipper. J'ai acquis récemment une bambulab X1C, et... j'avoue j'aime beaucoup la vitesse. Par contre le plateau : pas droit et seulement 256x256. Donc j'ai vu qu'avec Klipper je pourrais donner un sacré coup de jeunesse à ma sidewinder X1. Dès le début j'avais installé le waggster mode. Je me suis basé sur le tuto de 3D begininners, et j'ai adapté sa config avec la nouvelle méthode pour les params des macros. Cependant : Là, quand j'ai tenté de mettre le firmware klipper, ça à fonctionné, mais dès que j'ai demandé un home depuis l'écran tactile, le bltouch n'a pas arreter de rentrer/sortir en boucle sans jamais s'arreter. J'ai unplug l'écran, puis tenté de faire fonctionner klipper via mainsail. Mais même effet. Je pense que la config dans 3d beginner, voir le firmware lui même n'est pas adapté au waggster mode. Si qq'un peut m'aider ? Plz Merci d'avance
-
 Salut ! Pour résumer simplement : Klipper met à l'épreuve mes nerfs jour après jour. Voilà le problème qui m'amène a solliciter votre aide : Depuis Février 2023, cela ne date pas d'hier, j'ai Mainsail dont j'ai effectué une mise à jour... et cette mise à jour a tout foutu en l'air. Tout d'abord, plus rien ne fonctionnait sur l'imprimante (une Ender 5 Plus). Elle n'était plus du tout détecté par le raspberry. Et sur l'écran du raspberry pi, plus rien ne s'affichait. Après avoir réinstallé Mainsail, en reprenant depuis zéro, j'ai pût refaire fonctionner l'imprimante... sans l'écran du raspberry pi, qui restait noir. Après plusieurs dizaines de semaines à m'acharner... et à chercher des tutos "à jour", j'ai enfin pût refaire fonctionner l'imprimante comme avant, et avec l'écran du raspberry. Donc tout allait quasiment pour le mieux... Hormis un détail : La caméra. Cette caméra est une raspberry camera (je ne sais quelle version). (ce modèle : https://fr.aliexpress.com/item/4000923077057.html ) Le voyant led rouge de la camera est allumé... donc elle est alimenté en théorie. Mais je n'ai aucune image qui s'affiche sur l'interface Mainsail. Croyez moi ou non... mais j'ai recommencer l'installation des dizaines et des dizaines de fois... en prenant plusieurs tutoriels différents... mais rien n'y fait. J'ai également douté qu'elle fonctionnait. J'en ai acheté une autre (avec le module infrarouge)... mais elle aussi n'affiche rien à l'écran de l'interface. Puis j'ai essayé avec 3 webcam (plus classique), dont 2 logitech C270... mais rien n'y fait (bien évidemment en refaisant plusieurs fois l'installation). C'est donc avec 5 caméras différentes que j'échoue à faire fonctionner sur mon raspberry pi... et des dizaines de tutos. Donc après des dizaines de semaines à échouer sur ce problème, je sollicite votre aide. Auriez-vous à tout hasard un tutoriel 100% garantie efficace à me recommander ? Ou... auriez-vous à tout hasard rencontré ce problème et savez comment y remédier ? Merci d'avance.
Salut ! Pour résumer simplement : Klipper met à l'épreuve mes nerfs jour après jour. Voilà le problème qui m'amène a solliciter votre aide : Depuis Février 2023, cela ne date pas d'hier, j'ai Mainsail dont j'ai effectué une mise à jour... et cette mise à jour a tout foutu en l'air. Tout d'abord, plus rien ne fonctionnait sur l'imprimante (une Ender 5 Plus). Elle n'était plus du tout détecté par le raspberry. Et sur l'écran du raspberry pi, plus rien ne s'affichait. Après avoir réinstallé Mainsail, en reprenant depuis zéro, j'ai pût refaire fonctionner l'imprimante... sans l'écran du raspberry pi, qui restait noir. Après plusieurs dizaines de semaines à m'acharner... et à chercher des tutos "à jour", j'ai enfin pût refaire fonctionner l'imprimante comme avant, et avec l'écran du raspberry. Donc tout allait quasiment pour le mieux... Hormis un détail : La caméra. Cette caméra est une raspberry camera (je ne sais quelle version). (ce modèle : https://fr.aliexpress.com/item/4000923077057.html ) Le voyant led rouge de la camera est allumé... donc elle est alimenté en théorie. Mais je n'ai aucune image qui s'affiche sur l'interface Mainsail. Croyez moi ou non... mais j'ai recommencer l'installation des dizaines et des dizaines de fois... en prenant plusieurs tutoriels différents... mais rien n'y fait. J'ai également douté qu'elle fonctionnait. J'en ai acheté une autre (avec le module infrarouge)... mais elle aussi n'affiche rien à l'écran de l'interface. Puis j'ai essayé avec 3 webcam (plus classique), dont 2 logitech C270... mais rien n'y fait (bien évidemment en refaisant plusieurs fois l'installation). C'est donc avec 5 caméras différentes que j'échoue à faire fonctionner sur mon raspberry pi... et des dizaines de tutos. Donc après des dizaines de semaines à échouer sur ce problème, je sollicite votre aide. Auriez-vous à tout hasard un tutoriel 100% garantie efficace à me recommander ? Ou... auriez-vous à tout hasard rencontré ce problème et savez comment y remédier ? Merci d'avance. -

klipper commande retraction sous klipper
Mallozh a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous, après mes difficultés d'installation du BTT PAD7 et sa connexion à ma machine, j'ai réussi à regler 99% des sujets de configuration. j'ai, cependant, un problème résiduel que je n'arrive pas à régler! lors du start print, j'ai, juste avant de tirer la ligne d'extrusion test, une forte rétractation (+ieurs cm et a grande vitesse) sans aucune raison (a priori), ce qui fait que l'impression commence sans fil à extruder... je soupconne une partie du code du printer.cfg, mais laquelle? j'ai commenté les G92 pour l'extruder, mais ca ne semble pas avoir d'effet. le start Gcode dans Cura est limité à ; M190 S{material_bed_temperature_layer_0} ; M109 S{material_print_temperature_layer_0} START_PRINT le printer.cfg est en PJ (.cfg renommé en .zip) et le klippy.log également je n'arrive pas à voir où se trouve la commande qui me fait cet effet de retraction aussi brutal! parce que, pour le reste, ca tourne bien! printer.zip logs-20231101-194209.zip -

Paramétrage de Klipper sur une Alfawise U30
mathieu.parmentier@gmail.c a posté un sujet dans Alfawise / Longer3D
Bonjour à tous, Je viens vers vous afin de solutionner un problème que je rencontre sur mon imprimante Alfawise U30 (V08) avec Klipper. Après avoir regardé des heures de vidéos tuto sur youtube, j'ai installé Klipper sur mon imprimante récemment avec un BTT-PI 1.2. Tout s'est bien passé. Le chauffage de la buse et du plateau répondent bien, l'extrudeur et les axes X et Y fonctionnent aussi et dans le bon sens!. Par contre concernant l'axe Z c'est autre chose. Il ne bouge pas et le BL_TOUCH ne répond pas. Pourtant au démarrage de l'imprimante il sort et rentre bien. Quand je fais un homing j'ai une bonne réponse sur X et Y mais rien sur Z. La pin du BL_Touch sort mais la tête ne descend pas. Je pense que ça doit venir de la mauvaise attribution des pins. J'ai regardé les pins utilisées sur la vidéo d'Egalistel (qui installe klipper sur une alfawise U30), aucune ne correspond à celles que j'ai dans mon fichier printer.cfg (issue du github de klipper pour l'alfawise U30). Je me dis qu'il n'a peut être pas la même version de carte mère que moi. J'ai comparé au fichier config Longer LK4X et les pins ne correspondent pas non plus. Du coup ma question est: comment trouver les pins qui correspondent au BL_Touch et aux commandes du moteur de l'axe Z. [stepper_z] step_pin: PE14 dir_pin: !PB9 enable_pin: !PE1 microsteps: 16 rotation_distance: 8 endstop_pin: probe:z_virtual_endstop #!PE6 #position_endstop: 0.0 position_min: 0 position_max: 250 #pin mapping for Bl_t port [bltouch] sensor_pin: ^PE6 control_pin: PE5 x_offset: -51 y_offset: -8 z_offset: 0 speed: 10.0 samples: 2 samples_result: median sample_retract_dist: 3.0 samples_tolerance: 0.1 samples_tolerance_retries: 1 J'ai cherché sur le net mais je n'ai pas trouvé de pinout de la carte. Si quelqu'un à des infos sur ce sujet je suis preneur. Petite précision, l'imprimante et le BL_touch fonctionnaient bien avant avec Marlin. Je joints mon fichier printer.cfg pour aider. Merci )