pijalu
-
Compteur de contenus
38 -
Inscrit(e) le
-
Dernière visite
Tout ce qui a été posté par pijalu
-
As a maintainer of the community fix: I am stuck on 1.0.12.0 (Which will work fine on new HW - only change being the removal of the temp sensor fix implemented in the community fix) I have most of the HW of the S1 still in box, mostly because I have < 0.3 bed range (with middle around 0.08) : Tip was to replace the spring with flat yellow and remove internal support on the bed frame. Also replaced X and Y tension screws (stock was complete shit - could not hold). Hotend temperature is on the high side: best temp tower with most importantly, best strength on destruction/delim test. For the flow: it's indeed WTF - YOLO get me around 0.94 but Flexi Flow (https://www.printables.com/model/1113488-flexi-flow-calibration-tool-v4-by-ck3d) went further down - got tired with too many issues with sticking in place (I had to move my zoffset down 0.02) Note: My M1 is dedicated to batches of filaments (5kg) - I didn't redo the flexi test with others as I didn't had to printer flexi stuffs. Dimension accuracy was correct on Z - only X was off Nota: Not printing much precise stuffs so didn't go further than basic tolerance/cube test. I see you do deeper tolerances check with your test print + know that i use an AliExpress caliper so accuracy is obviously not my top concern as long as my functional prints in home do fit. z shift: I do run the M1 next to an Anycubic K1S on the same (shit) table: I'll take some cares but influence seems to be more on the K1S than the M1. All shifts on the M1 could be linked to some form of blobs/unstable flow issues, which are, to this day / with my setup - gone. Flow unstability was mostly visible within infills looking not very good... and leading to hard contacts - I went for higher temp instead of slowing down (on 0.4). In 'printer' camera is shit: It will error out / get EMI and typically will usually get disconnected by the OS - Community comes with some fixes via udev power tweak + printer-patcher has now an action to ressuscite a dead cam without killing on-going print. It will also get quite some frame corruptions - I suspect the whole thing is extremely sensitive to electric disturbance (some had good results on a conditioner but I like to live on the edge - and) The RK3308 is known to experience USB issue under load - so I do have a disable AI service as well. All to say: the M1 is very finicky - my approach is: buy filament in batch - do the complete calibration - z offset IS linked to your setting as well because the hotend fixation is sensitive to thermal expansion. The same for the bed - it's laminate alu so it's full of tension points... and will get better (or worse) based on heating cycles
-
for the cable: it's a known issue - the printer is extremely sensitive - in my case, my home made one had to be under 30cm to allow flashing. I obviously run community fw with Orca 2.3.0 (AS does not work in dark mode) For PETG: right now on some random black friday geeetech - flow ratio: 0.87 / PA: 0.055 / Noz: 265-250 / MaxVol: 20mm3s /Tex PEI: 85/80 I print door closed but topless (in a cold garage - temp are quite fine) - the flow is ridiculously low but was calc based on flexis test and does give me the best results. Check the nozzle for leak - may need temp thigthing - mine was leaking/blobing with PETG on higher speed. Cut AI / format the SD card FAT to lower CPU pression. Check if the XY tension is correct / flush with the head full front / middle door - frame should touch both - if not... you will have to fix it. My gcode zoff (aka: babystep not saved!) : 0.13 - zoff probe: 0 - zoff 0 in orca - you probably can play with zoff in AS if you can't get community - warning about bridge speed and retract in AS, they can be non-sensical I do not use any release / glue - adhesion is pretty good / so far doing >24h prints without much issue. Camera is shit and need help but there are work around possible (wake up scripts/usb power tweaks) Dimension wise: my stepper_x was slightly off - so I had to fix the rotation distance rotation_distance: 39.87 #40.0 and of course: The printer is very sensitive to layer shift - so yeah... any contact can lead to shifts... most of my issue was linked to PETG blobs and adhesion weakness
-
and I am the cheapstake running the cheapest basic PETG I can get on AliExpress - at 20mm3/s and full speed /hide
-
Hi - going for english to make it easier: Don't worry - as much as I hate Artillery approach, there are ways to make the M1 behaves reliably Maybe join the FB group and ping me (Pierre): https://www.facebook.com/groups/artillerym1 so I can drive you to the specific problems and way to fix
-
Et c'est très bien - maintenant - attention a certain points que je dois clarifié: - obsolescence: je ne parle pas du manque de pièces mais du fait que le eMMC est sous charge d'écriture *continue* dans le FW Artillery, hors il ne devrait servir qu'a la lecture - l'imprimante va avoir une durée de vie très proche des 2ans et puis c'est fini - elle est pour la poubelle: Le refus d'honorer la GPL rend tout le HW comme proprio, et la carte contrôleur va mourir en fin de garantie. - AI: le choix de la carte (et de ses soucis en charge documenté depuis des années) rend l'idée non seulement ridicule *MAIS* va généré des soucis lors d'impression plus technique: risque accrus de perte de connexion. Et pour l’intérêt, la charge nominale de l'imprimante, en idle, est absolument incroyable. Le LCD et l'AI même désactiver approche la charge maximal. Le reste est une loterie - le lit, par exemple, s’améliore ou se dégrade avec le temps suite a l'usage d'un laminé (tu as des points de tension). Les mesures étant prise à température incorrecte - tu va avoir un coefficient multiplicateur des erreurs: Un lit droit/l'impression sur une zone stable au travers des températures va permettre au sondage de rester dans des différences acceptables (aka: une erreur entre mesh et réalité en dessous de 0.05) - la mise à niveau du Z étant faite à température avant le début d'impression - mais en cas contraire - le lit va démontrer des différences trop importantes et l'imprimante va se mettre à rater de plus en plus d'impression. Le problème d'une chauffe non homogène étant juste une complexité supplémentaire. Et c'est un point a tenir en compte: j'ai vu de nombreux utilisateurs passé d'un paradis à un enfer suite à ce type de dégradation "attendue". (et c'est la beauté: un gain à la loterie n'est que temporaire) On a essayé d'avoir des rapports constructifs avec le constructeur - proposé des rustines - demandé l'ouverture des codes pour permettre un approche plus constructive mais la seule réponse a été de fermer plus en avant l'imprimante et de bannir les utilisateurs démontrant les lacunes. Ma M1 fonctionne - j’espère que le groupe communautaire crée permet au personne ayant fait le (mauvais) choix de pouvoir malgré tout imprimer avec une certaine qualité mais que personne n’achète cette imprimante - c'est une ford pinto qui ne tourne qu'a gauche
-
Exactement le problème: NON Et c'est important de documenter les choses correctement pour éviter que des acheteurs ne se retrouvent avec une imprimante inutilisable. C'est une loterie et les chances sont limitées... J'ai bricoler ma M1 et elle fait un taf incroyable (je suis un des gu-gus à la source des fixes communautaire) - elle approche les 400h d'impression sans soucis (sans les upgrades) *MAIS* il est important de savoir que mon cas n'est pas normal et a demander une certaine connaissance: - J'ai du remplacer la carte de la tête d'impression car connecteur dessoudé - J'ai du fixé bricoler sur la buse, qui bien que "collée" n'était pas étanche sur des températures plus elevés - J'ai changer les ressorts du lit - J'ai découper une partie du support du lit - J'ai remplacer les vis de tensions - J'ai remplacer les macros Artillery afin de supporter correctement les températures du lits - Le support m'ayant confirmer que l'imprimante ne sait imprimer que du PLA sur lit a basse température de façon stable... - J'ai supprimer la partie AI qui est tellement gourmand que la connexion avec le hotend peut tomber (bug HW sur la RK3308 connu !)... - J'ai corriger une partie du code Klipper qu'Artillery a dégueulassé (et je ne parle pas du code qu'ils ont "volé", en brèche avec la GPL) - J'ai commit le support M1 sur Orca (promis par Artillery en pre-launch et pas délivré) - J'ai reouvert l'access vers Fluidd/Moon/Klipper - Et petite exclu: Obsolescence programmé - la M1 s'autodetruit petit à petit - la mémoire de masse de la carte RK3308 ne supporte qu'un nombre limité d'écriture... et le FW Artillery faire des écritures continues sur le media... qui n'est pas remplaçable - dans 1 a 2 ans, l'imprimante sera incapable de fonctionner (le stockage est soudé au contraire le la X4...La M1 a une carte controlleur nettement inférieur tant en qualité qu'en puissance par rapport à la X4) - vu que Artillery refuse d'honoré la GPL, elle sera pour la poubelle car une partie du HW est "magique" Les fixes HW "S1" sont des demi-mesures - la dernière mise à jour (2.0.10.12) vient avec des changements WTF et un QA inexistant, y compris des écrans en chinois sur l'AI... Aucun changements sur le fond / aucun fixes (au contraire)...Alors oui, l’expérience sera meilleure car le lit va moins se déformer mais le probing reste incorrect et rend tout usage pour filament technique type ASA/ABS plus qu’aléatoire vu les températures du lits (écars de plus de 0.5mm entre probing et impression) Si tu compares la M1 avec les concurrentes (Kobra/CC) - y'a pas photos: La M1 est sans le moindre doute le pire choix - sur papier elle pourrait, mais dans les faits, c'est une imprimante à PLA et rien d'autre. C'est le mauvais choix et c'est ok J'ai aucun soucis avec des retours positifs, mais cela reste important de les (re)mettre en contexte... (Point maintenant interdit sur les groupes officiels, où avoir un soucis technique peut provoquer le ban....)
-
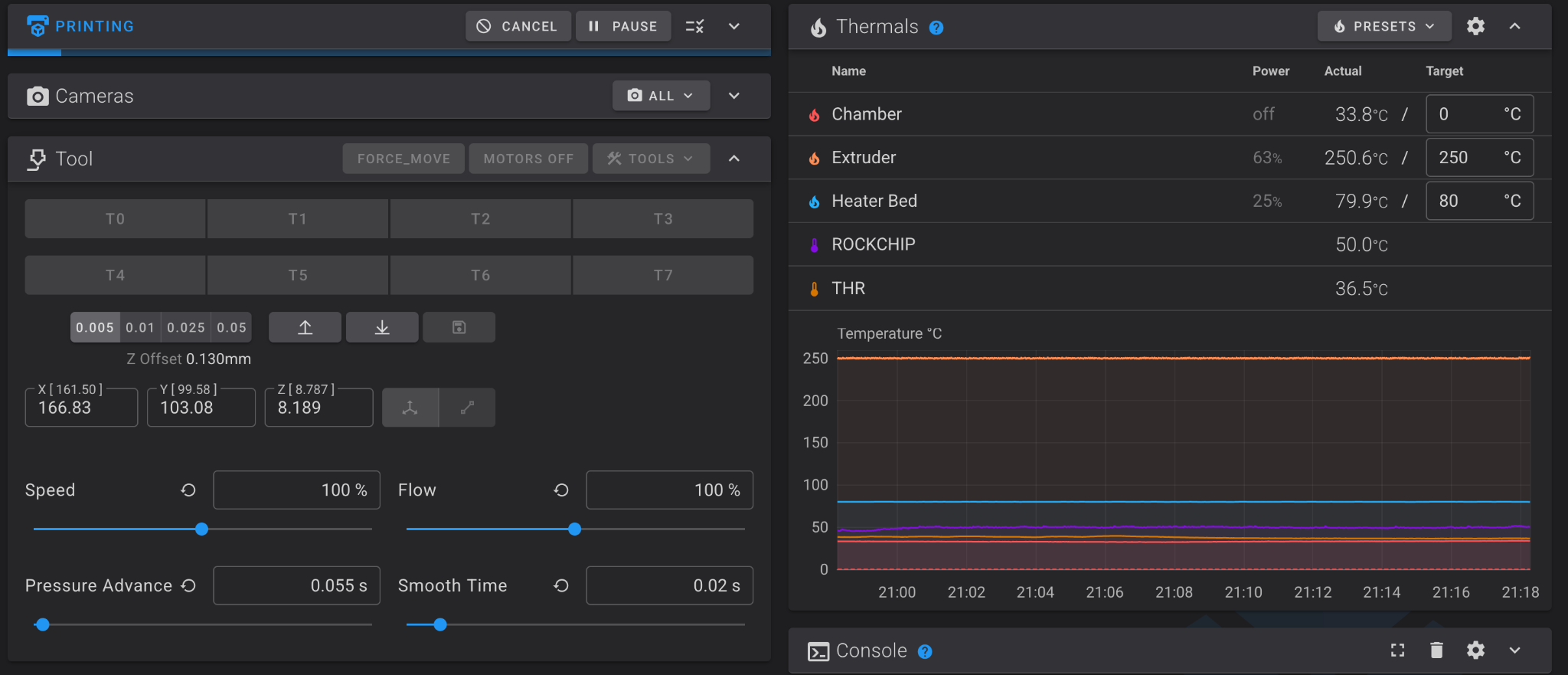
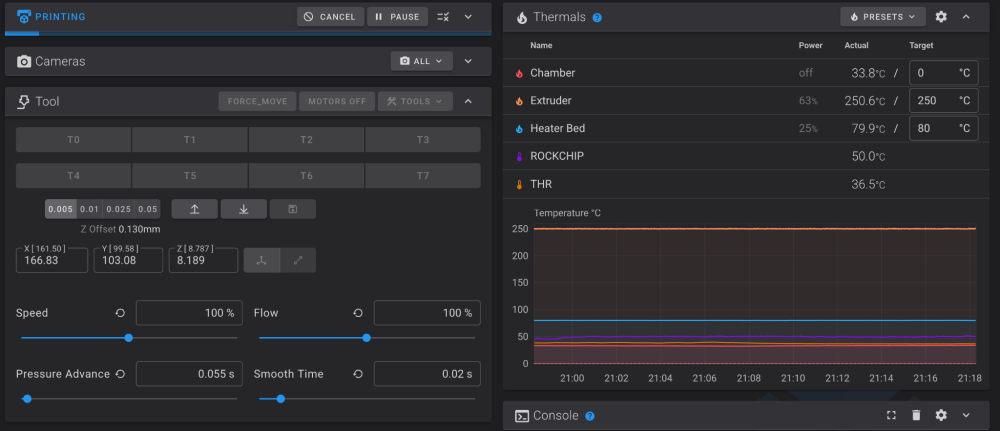
Aucune nouvelle pour le système multi-couleur et c'est sans doute une bonne nouvelle vu les problèmes de gestions des filaments... Pour l'AI: Bonne chance: la carte contrôleur a des soucis importants lors de montée en charge qui rende le bus USB instable (un point connu de la RK3308) et leur AI (et LCD) bouffe beaucoup trop de cycle. C'est une des raisons pour laquelle Artillery tente d’étouffé ce type d'information car: - La caméra à des problèmes hardware important et devrait être changé - La carte contrôleur n'est pas conçue pour supporter la charge nécessaire (ne pas oublier que la M1 tourne avec un carte bien inférieur à... la X4...) Et il s'agit également d'une des raisons de la fermeture de Fluidd, qui permet de voir les limitations de la machine assez clairement (load, niveau du lit)... Dans mon cas, je connais assez bien le monstre et j'arrive a des résultats corrects mais bon dieu, c'est du bricolage (=il y a moyen de l'utiliser, mais l’expérience est digne d'une Ender3 qui se prendrait pour une bambulab...)
-
https://wiki.artillery3d.com/m1/maintenance/m1-pro-upgrade-guide https://wiki.artillery3d.com/m1/maintenance/m1-pro-s1-optimized-ap-board-algorithm-software-installation-tutorial-guide et le "firmware": https://usa.artillery3d.com/m1pros1/KLP_IMG_ARTILLERY_M1_PRO_S1-SOC_20251126_Beta.zip Bonne chance !
-
Tu pourrais verifier le resultat de dmesg et les logs de klipper quand tu as le soucis ?
-
Pour info : Artillery fait une purge de tous les avis négatifs sur ses médias. Dans mon cas, j'ai été ban des groupes FB car j'ai démontré le manque de transparence sur les avis d'un membre qui cachait son statut de revendeur (vu que les problèmes rencontrés était du aux utilisateurs / l'imprimante étant parfaite...) . Les avis sur le site (5 stars - best printer ever) sont bien entendu manipulés: Artillery ne publie aucun avis négatif et trouve cela normal. Un point intéressant : Le kit est maintenant présenté non pas comme une série de "fixes" mais d’upgrades ‘offerts' pour les early-adopters (ce qui signifie qu'il n'est pas intégré à la garantie légale). Un membre sur FB a également été ban suite au lien vers... une page WIKI qui expliquait encore qu'il s'agissait bien de fixes pour des problèmes hardwares. Pour moi, il s'agit non plus de la plus mauvaise imprimante de 2025, mais bien de pratiques commerciales douteuses.
-
En fait, je pense que c'est exactement ce qui est arriver. Simplement la "marque" est restée et les actionnaires tentent de sauver les investissements fait pendant des années en R/D, sans avoir véritablement les capacités de terminer le projet... d’où l'impression de scam... (et ce qui rend les choses tellement étrange) Et pendant ce temps là, j'ai reçu un nouvel extruder et un capteur de force chez Anycubic... "au cas où" j'aurais encore des soucis avec le leveling... PS: Et ton utilisateur italien était, au début, un grand fan de la M1... et la il a juste besoin d'un hotend - totalement dingue...
-
Perso, je cherche encore les personnes qui arrivent à utiliser la M1 sans soucis Sérieusement - sur les communautés FB et Reddit - y'a pas photo. J'ai suivi les plâtres de la CC et K1c et y'a eu des soucis - mais pas du même niveau... On est 4 mois après, pas le moindre changement. Pas de bol, je suis capable de décompiler/comprendre leurs binaires donc je sais faire la part entre les déclarations et le contenu des releases... Et le vrai soucis: quand ton imprimante foire, c'est un parcours du combattant pour obtenir des pièces... au contraire des autres qui envoient (presque) une nouvelle imprimante en kit car tu demandes pour une vis... La M1 est passée de "pire imprimante" à "scam"... et y'a pas encore le système couleur...
-
D’après les utilisateurs qui ont reçu le nouveau matos, ont est très très loin d'un wow - le lit est toujours plié: (je suis a 0.4 avec le lit d'origine, des resorts plus plat et le retrait des trucs en plastique) et semble que l'extrudeur soit toujours enclin a se boucher comme la route des vacances le jour des départs... et pas obligatoirement de bonne qualité... Pour la CC, mais j'avais pas lu autant de prob - même avec un nombre d'utilisateur d'un ordre de magnitude supérieur. J'ai a coté une Anycubic kobra S1 avec son combo... et soyons honnête: elle détruit la M1... meme si le HW est "inférieur"... nettement plus stable, une app qui marche... J'ai déja eu des (gros) soucis et gravure sur plaque après 200h avec un hotend original qui s'est fait la malle : 1 semaine après j'ai reçu une nouvelle plaque et nouveau hotend upgradé... support sans soucis ni blabla... (et point important: pas mal d'ugrade dispo sur Ali pour des cacahuètes) Donc, si on parle saison, on a commencer de suite à la dernière saison de Lost avec la M1, limite l'episode final ou on se regarde apres et on est "WTF"
-
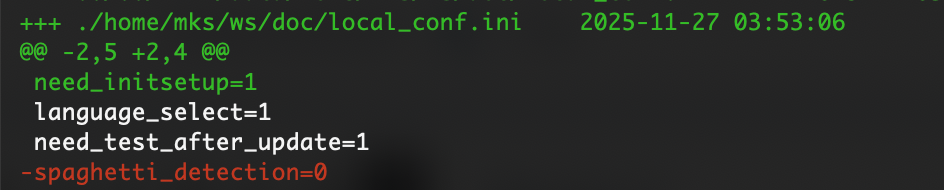
Pas pour faire le rabat joie mais le "nouveau" firmware 1.0.13.0 n'apporte pas de corrections véritables mais casse assez bien les fixes "community" (Hard code dans le LCD qui rend impossible les fixes pour les filaments)... et on ne parle pas que pour certain, ce firmware introduit de gros soucis de Zoff et layers shifts... Pour le fameux "S1": aucun changement dans les fameux changements "algorithmes" du lit et co, et les personnes qui l'on deja recu sont... mitigé... Pour les curieux: Pas de changement sur moonraker, et voici les changements S1 mis a plat dans l'arbre Klipper, en rapport "avant": https://github.com/Klipper3d/klipper/commit/c4624c985e138b5bce5d082de1307b78338b9878 Ça sent quand même fort le "slideware" ou l'on explique que tout est changé pour tenter de "vendre" une imprimante plus stable... sans changer le moindre élément tangible... C'est certain que le lit est plus épais mais on reste dans le 0.5, le soft reste "PLA only", aucun des fixes documenté vers Artillery n'est present... et c'est assez idiot. Je termine un dernier truc comme cadeau de noël mais je pense que nous arrivons à la fin du support Community - la v1.0.12.0 est le dernier firmware qui sera supporté
-
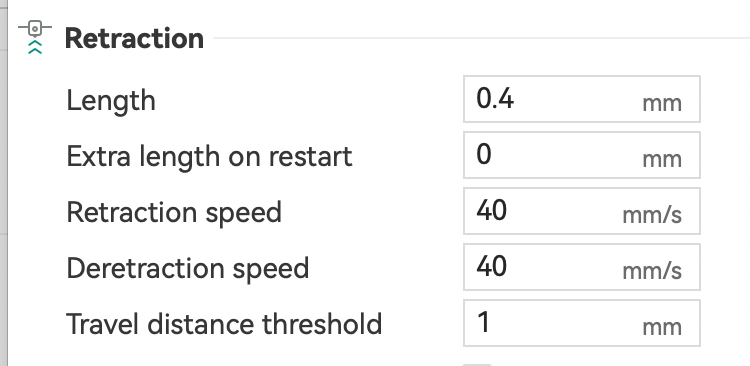
Update AI
-
Ah oui, ca, c'est définitivement à changer Attention tu as cela dans la partie extruder machine ET filament. (Dans mon cas, la rétractation semble ok avec tant le PLA que le PETG. Y'a moyen d'être plus bas mais n'ayant pas de soucis, je touche pas) Nota: les profils ont des aussi des flow/max flow un chouïa WTF, donc a vérifier tant qu'à faire.
-
hmm, perso je suis assez standard me semble (sur la version community) et pas de soucis particulier
-
çà c'est purement un effet placebo - aucun changement si ce n'est le choix de faire maintenant monter la chambre à 50 degré, comme ça, quand il va purge Y'a aussi la détection AI qui semble etre mise on par défault: mais le modèle reste le même et déclaré par Artillery comme immature... suite a trop de faux positifs... Bon, il reste possible que le LCD fasse encore une dégueulasserie pour mitiger les erreurs du modèles (Source: J'ai une certaine habitude de packaging Artillery...) Dans mon cas - je reste sur la 1.0.11.0 et je conseille a toute personne de rester au max sur 1.0.12.0 Cette release est au plus preparatoire à leur AMS mais ne fixe aucun des problèmes fondamentaux sur la gestion des filaments et en introduit d'autres. Comme dit pas le support: L'imprimante est calibrée pour le filament a basse temperature: PLA... Fun stuff: Je suis me semble censuré sur le FB officiel (au moins en partie), fo dire, j'avais mis en évidence que leur impression démo avait un léger soucis d'adherence... Vu qu'ils demandent à certain 40 euro pour envoyer des pièces de rechange sous garantie, j'imagine le kit d'uprade à 500 boulles... Mais tu reçois une Bambu avec un sticker Artillery3D... Et tant qu'a faire, car c'est peut-etre la source de la mauvaise information sur l'algo du lit: il y a une version 2.x et un update de nom: Artillery M1 Pro S1: https://wiki.artillery3d.com/m1/maintenance/m1-pro-s1-optimized-ap-board-algorithm-software-installation-tutorial-guide

-
C'est presque la même release (et donc purement fix pour le multi-material) - seul changement: le soft LCD semble avoir été recompil...

-
quand j'ai eu des soucis de shifts, j'avais aussi du envoyer un STL... j'avais pas fait attention et c’était pas le bon... (manquais les supports... autant dire que c’était une fabrique à Barilla) et zon pas réagit ... enfin... zon jamais réagit... J'aime beaucoup le point "c'est les supports de Satan" De mon coté j'ai du bol: ils discutent pas - là j'ai demander un ressort pour l'extrudeur, ils m'ont envoyer un extruder complet (sans la carte THR que j'ai déjà du faire remplacer car dessoudée) Mais bon, cette imprimante restent hantée La M1, si j'ai pas calibré au couteau, elle t'explose à la gueule... la j'ai un joli filament PLA mate rose qui a juste pas envie, mais sort sans le moindre chipotage sur ma Anycubic K1s en mode "PLA-j'ai-pris-les-defaults" J'ose même pas imaginer avec les "Bouffe à Panda"
-
Et Artillery a retirer la version 1.0.12.07 - on est a nouveau en 1.0.12.00...
-
Pour le fun: Nouveau firmware - 1.0.12.07 Tout les changements semblent lié à leur AMS - aucun fixes sur les problèmes de calibrages, de mesh ou consort... Donc attention - je sens bien que l'on va avoir pire que la M1 Pro: la M1 Pro avec un module multi-couleur /hâte
-
mais où est le fun et le goût du risque /sarcasm
-
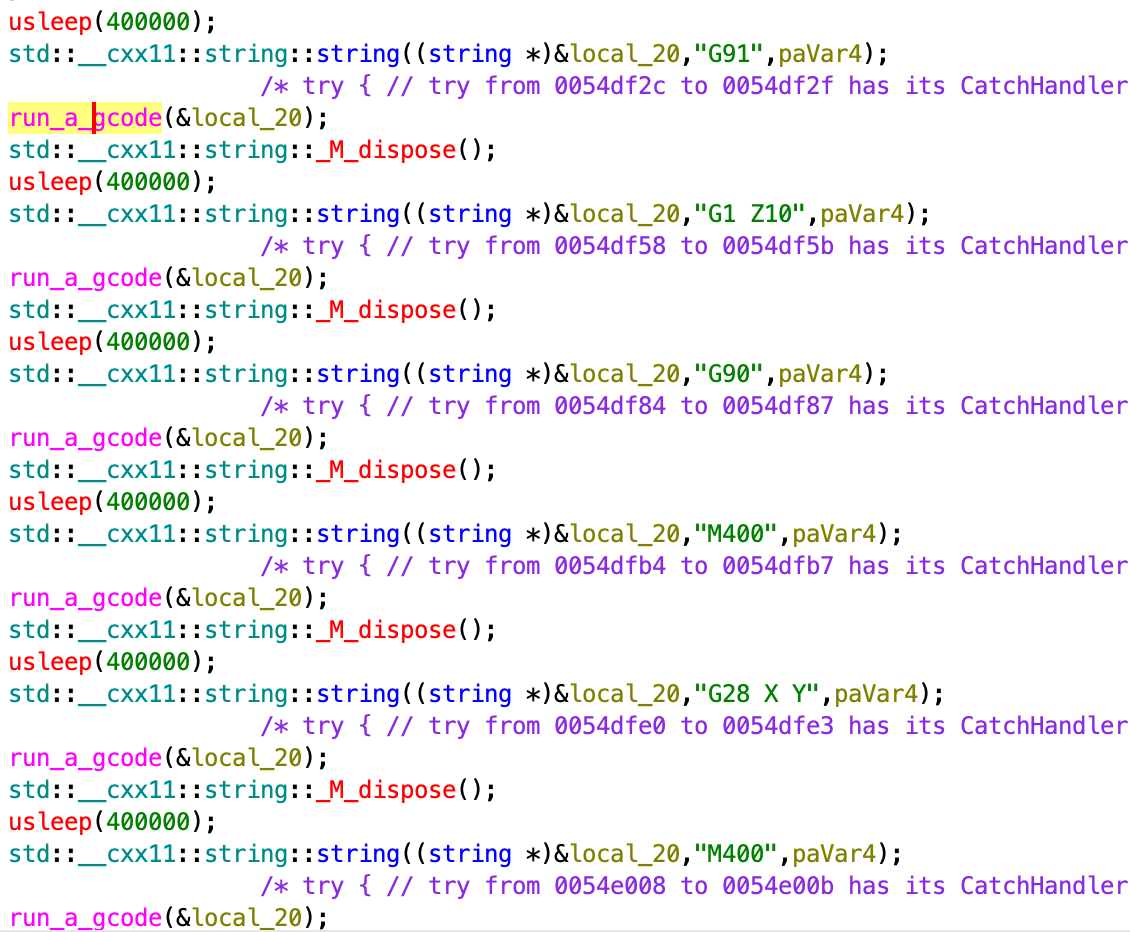
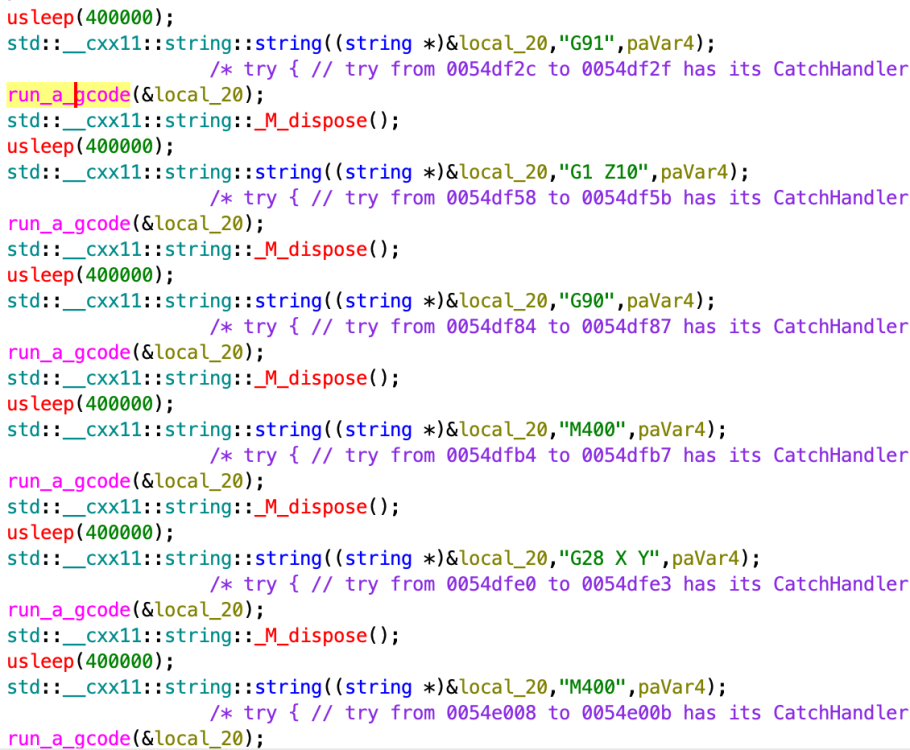
intéressant - j'ai snif la machine OTA et rien dessus. Les RN semblent me dire que c'est un nouveau bricolage dans le client LCD, qui est déja une infamie - eg: un morceau du start print... qui contient en hardcode une serie de gcode, qui ne valide rien et fait des sleeps... aka: Faire un truc propre avec des macros c'est trop demander... je me demande parfois comment cette imprimante est capable de booter... Et tant qu'a faire, pour les curieux (et vu que je ne pense pas que Artillery regarde ce forum): il existe 2 versions du firmware: - La générale: http://studio.ota.artillery3d.com:9190/home/downloadnewest?customerType=Yuntu_m1&firmwareType=Yuntu_m1_client_deb - La version debug de MKS: http://studio.ota.artillery3d.com:9190/home/downloadnewest?customerType=Yuntu_m1&firmwareType=Yuntu_m1_test L'access à la version de test se fait via la création d'un fichier sur l'imprimante: /home/mks/printer_data/gcodes/DEBUG_MKS.txt à l'heure actuelle: pas de changement entre les deux
-
Hmm Le service d'update OTA me dit que l'on est tjs en 1.00.12.00 - cf http://studio.ota.artillery3d.com:9190/home/downloadnewest?customerType=Yuntu_m1&firmwareType=Yuntu_m1_client_deb