alainhautdoubs
-
Compteur de contenus
9 -
Inscrit(e) le
-
Dernière visite
Récompenses de alainhautdoubs
")





-
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonjour, Merci beaucoup, Je vais tester et je te tiens informer. Bonne soirée Alain -
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonjour, Merci de ta réponse, je ne savais pas que le câblage est comme la Genius. Comment savoir si le câblage est comme la Genius ? Ma carte mère est une Rubi 1.2. Avant que tu me répondre, j'ai essayé plusieurs choses. J'ai débranché le Z d'origine. // Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup). #define X_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. Changer le 04_12_2025 #define Y_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. #define Z_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. Changer le 04_12_2025 #define I_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define J_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define K_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define U_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define V_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define W_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define X_MAX_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. Changer le 04_12_2025 #define Y_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Z_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define I_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define J_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define K_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define U_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define V_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define W_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Z_MIN_PROBE_ENDSTOP_INVERTING false // Set to true to invert the logic of the probe. Et aussi // Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way. #define INVERT_X_DIR false //changer le 04 12 2025 #define INVERT_Y_DIR true //changer le 04 12 2025 #define INVERT_Z_DIR false //#define INVERT_I_DIR false //#define INVERT_J_DIR false //#define INVERT_K_DIR false //#define INVERT_U_DIR false //#define INVERT_V_DIR false //#define INVERT_W_DIR false Par contre, j'ai l'impression quand je fais un Auto Home, le moteur force donc j'étais tout. Voici ma petite liste que je me suis fait. Configuration.h define BLTOUCH #define NOZZLE_TO_PROBE_OFFSET { 10, 10, 0 } #define USE_PROBE_FOR_Z_HOMING #define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN #define AUTO_BED_LEVELING_BILINEAR #define Z_SAFE_HOMING #define GRID_MAX_POINTS_X 5 // Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup). #define X_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. Changer le 04_12_2025 #define Y_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. #define Z_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. Changer le 04_12_2025 #define I_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define J_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define K_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define U_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define V_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define W_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define X_MAX_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. Changer le 04_12_2025 #define Y_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Z_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define I_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define J_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define K_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define U_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define V_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define W_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. #define Z_MIN_PROBE_ENDSTOP_INVERTING false // Set to true to invert the logic of the probe. // Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way. #define INVERT_X_DIR false //changer le 04 12 2025 #define INVERT_Y_DIR true //changer le 04 12 2025 #define INVERT_Z_DIR false //#define INVERT_I_DIR false //#define INVERT_J_DIR false //#define INVERT_K_DIR false //#define INVERT_U_DIR false //#define INVERT_V_DIR false //#define INVERT_W_DIR false Configuration_adv.h #define LCD_INFO_MENU // (A propos) Oui je veux bien que tu me transmettre une version X2 du firmware. Merci beaucoup
-
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonjour, Merci de prendre le temps pour moi, dans le firmware Je n'ai pas mis #define PROBE_OFFSET_WIZARD et j'ai vu que c'est conseillé. Et si tu vois des choses à modifier ou à ajouter dis le moi. Merci Alain -
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonjour, Merci beaucoup de tes conseilles. Je fais une demande. Comment brancher bien le BLTouch sur un Artillery Hornet ? Merci Alain -
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
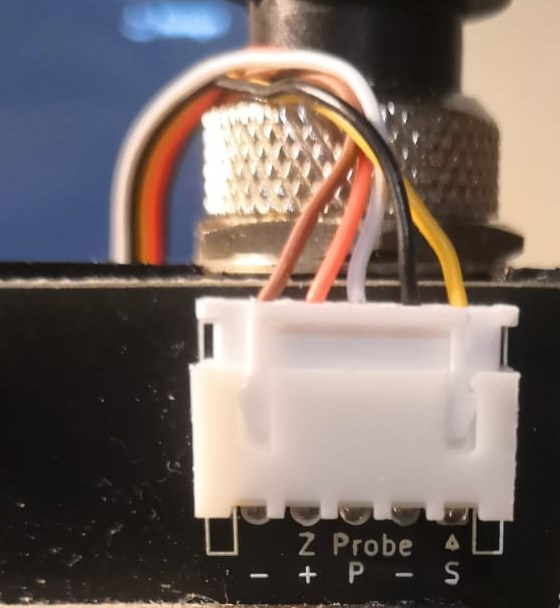
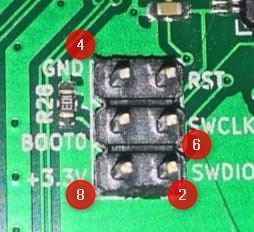
Je ne peux pas descendre l'axe Z. Voici la photo de la carte fille et aussi le BLTouch Voici l'ordre des fils que j'ai mis sur mon imprimante : - Marron + Rouge P jaune - Noir S blanc Merci Alain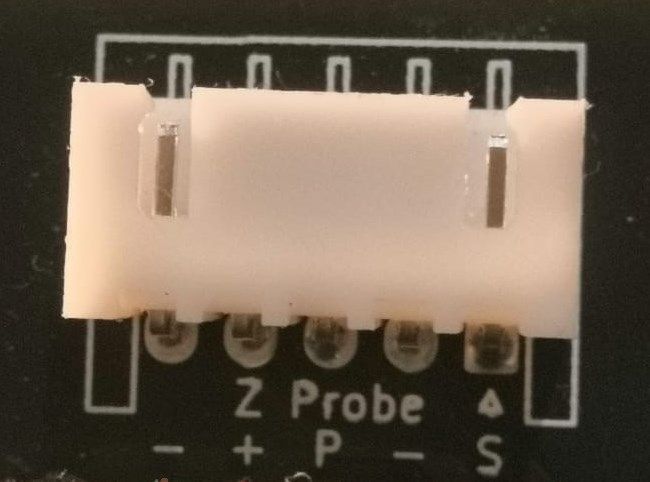

-
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonjour, Mon imprimante 3D est une Artillery Hornet. Comme tu as vu dans la documentation que j'ai mis j'ai branché les fils du BLTouch par rapport à ma carte fille. Une fois que le firmware a été créé, je l'ai envoyé sur l'imprimante. D'abord j'ai allumé l'imprimante, et la l'extrudeur ( le Z) bouge de gauche à droite mais il se bloque un peu au milieu en faisant un bruit et le BLTouch fait son test il s'allume bien et s'éteint. Mais quand je fais un Auto Home il fait pareille mais il reste toujours en haut comme sur la photo que j'ai mis avant. Voilà les symptomes. Pour information, j'ai vu qu'il fallait mettre dans configuration.h #define Z_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop. en #define Z_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop. Sinon j'ai une erreur dans le firmware, je ne sais pas si c'est lier. Je ne sais pas aussi comme mettre les bonne valeur je n'ai pas compris ce passage. #define NOZZLE_TO_PROBE_OFFSET { -42, -7, 0 } Voici mon fichier configuration.h et configuration_adv.h Merci Alain Configuration.h Configuration_adv.h Pour information j'ai fait la commande M119 voici le résultat ---- Message encodé en utf8 envoyé : "M119\r\n" ---- Reporting endstop status x_max: open y_min: open z_min: TRIGGERED ok -
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonjour, Merci de la réponse. Je viens de vérifier / Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way. #define INVERT_X_DIR false #define INVERT_Y_DIR false #define INVERT_Z_DIR false //#define INVERT_I_DIR false //#define INVERT_J_DIR false //#define INVERT_K_DIR false //#define INVERT_U_DIR false //#define INVERT_V_DIR false //#define INVERT_W_DIR false Donc je ne sais pas. Si tu connais ou d'autres personnes peuvent m'aider. Merci Alain -
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs en réponse au topic de alainhautdoubs dans Artillery
Bonsoir, Merci pour le lien. Normalement le Z si j'ai bien compris, devrait être environ à 0,3 mm du plateau ? Mais là quand je fais un Auto Home j'ai un écart en le plateau et le Z de 220 mm le maximum est 250mm. // Travel limits (linear=mm, rotational=°) after homing, corresponding to endstop positions. #define X_MIN_POS 0 #define Y_MIN_POS 0 #define Z_MIN_POS 0 #define X_MAX_POS X_BED_SIZE //220 #define Y_MAX_POS Y_BED_SIZE //220 #define Z_MAX_POS 250 Ma question : comment je fais pour baisser le Z dans configure.h et/ou configure_adv.h ? Voici une photo explicative quand je fais le Auto Home il reste toujours là. Merci Alain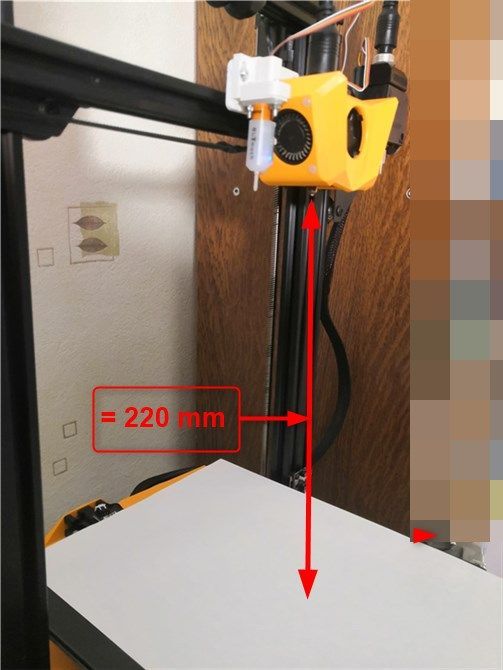
-
Configuration du BLTouch et Firmware Artillery Hornet
alainhautdoubs a posté un sujet dans Artillery
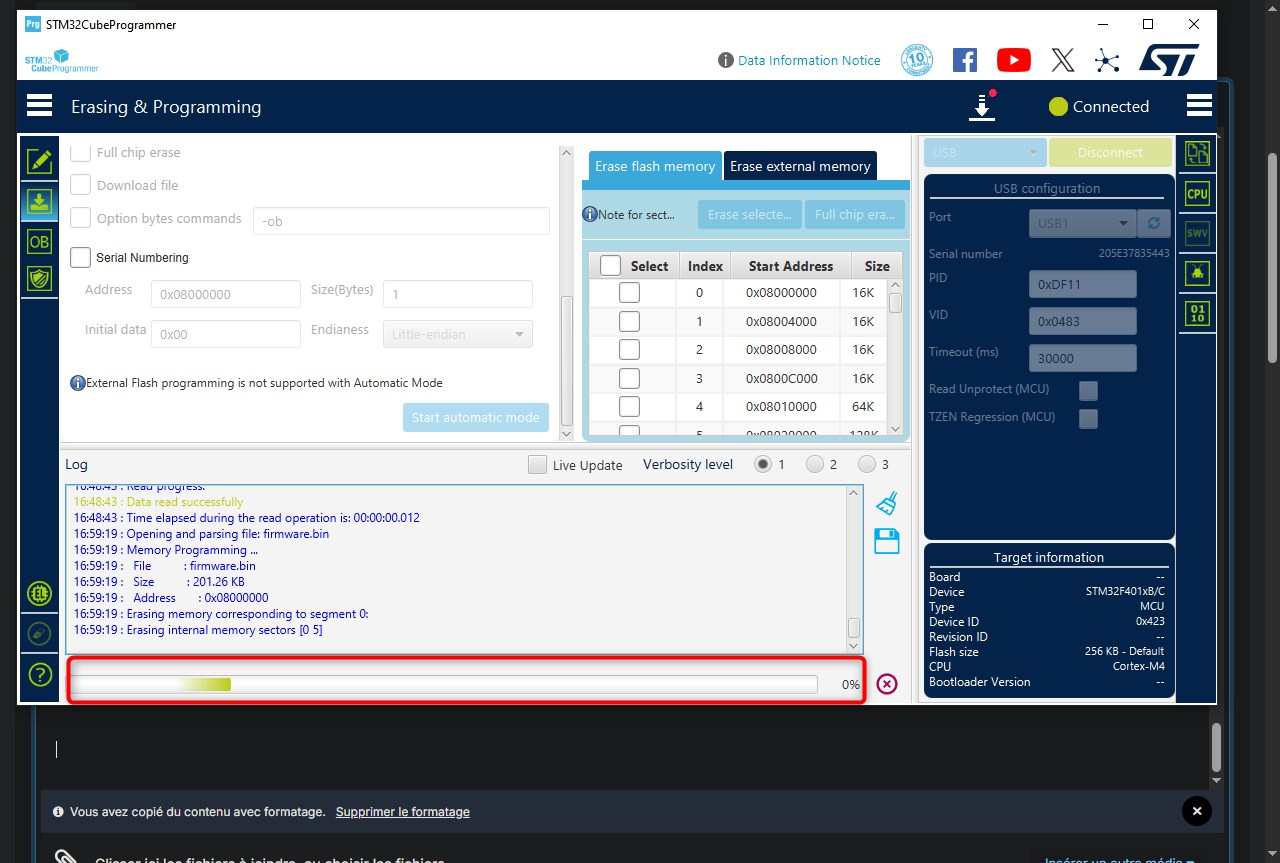
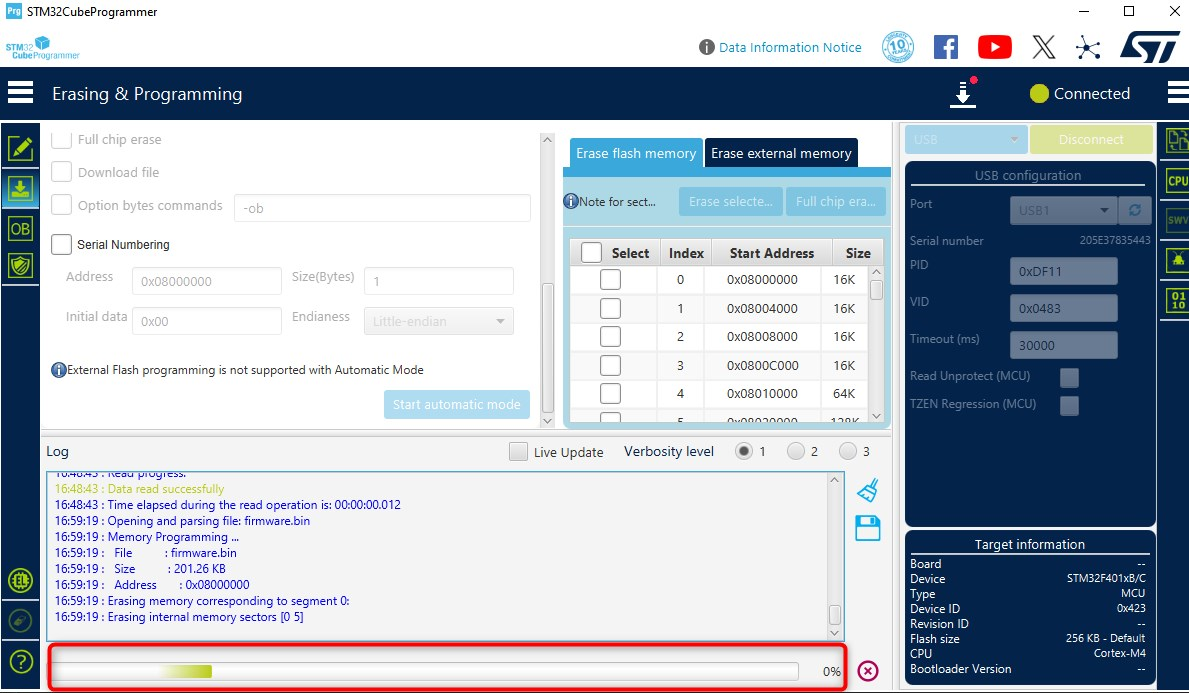
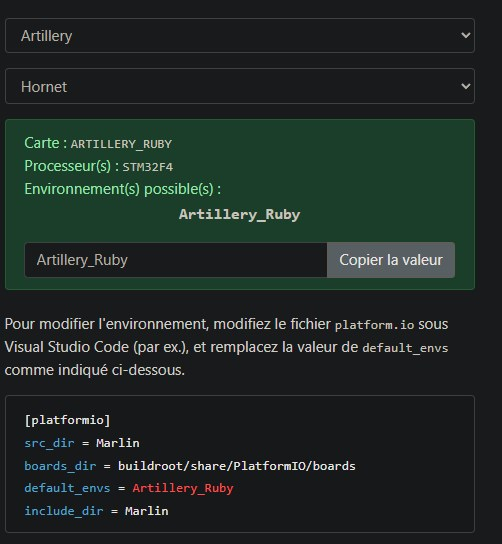
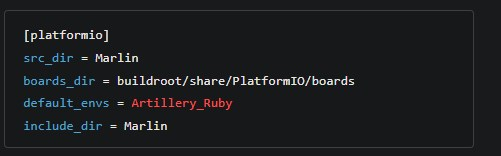
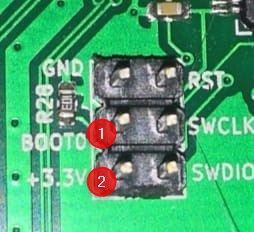
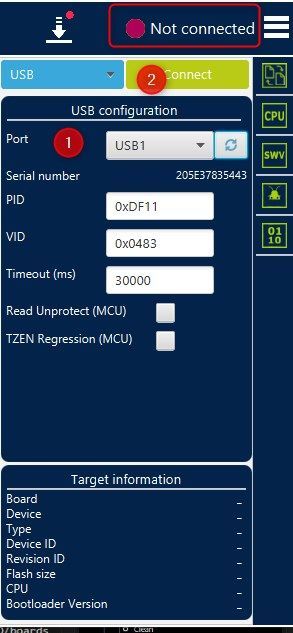
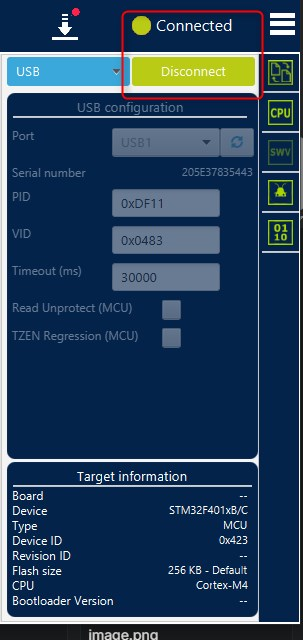
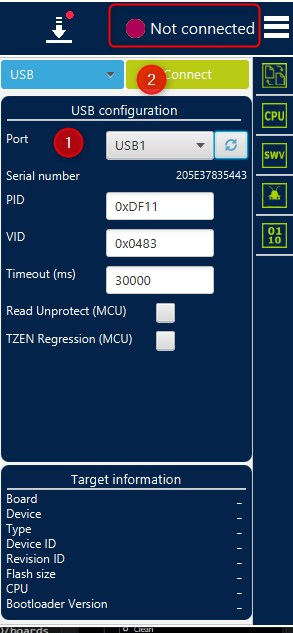
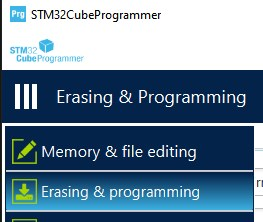
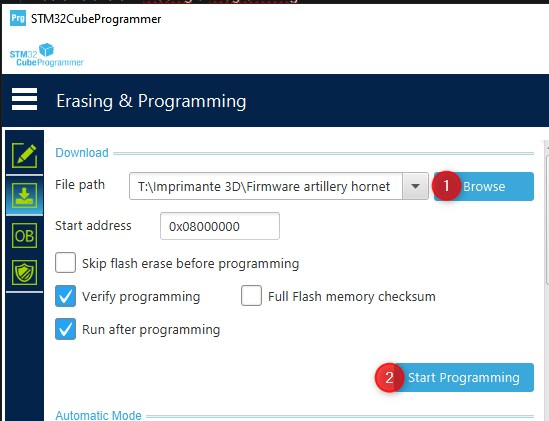
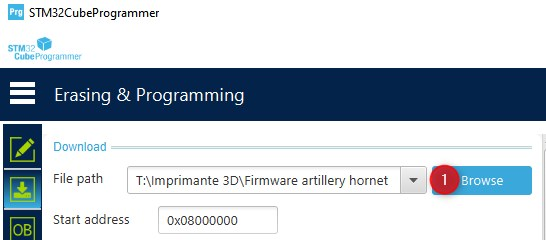
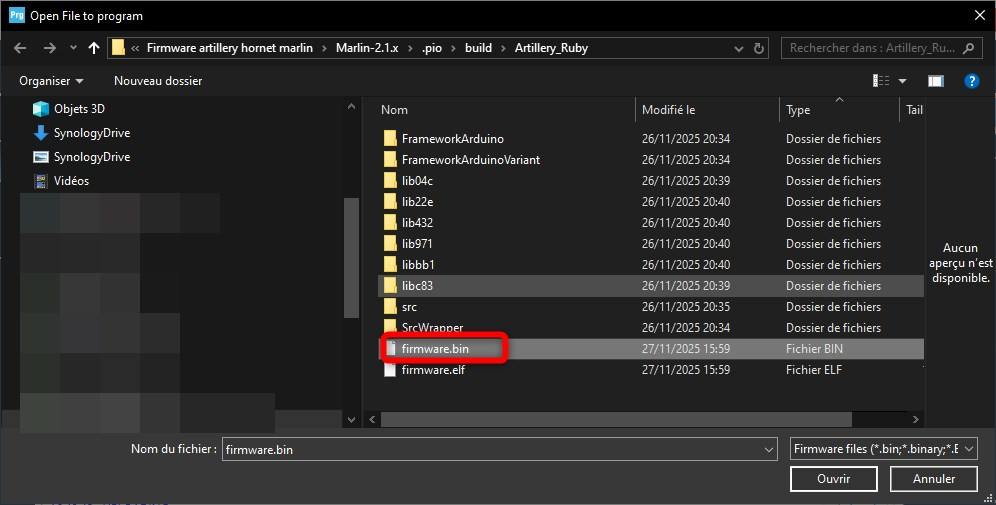
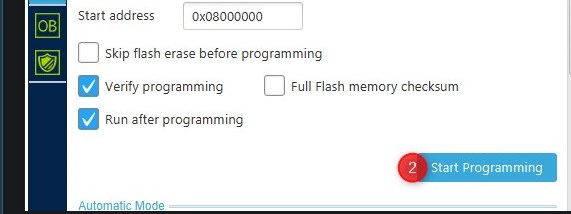
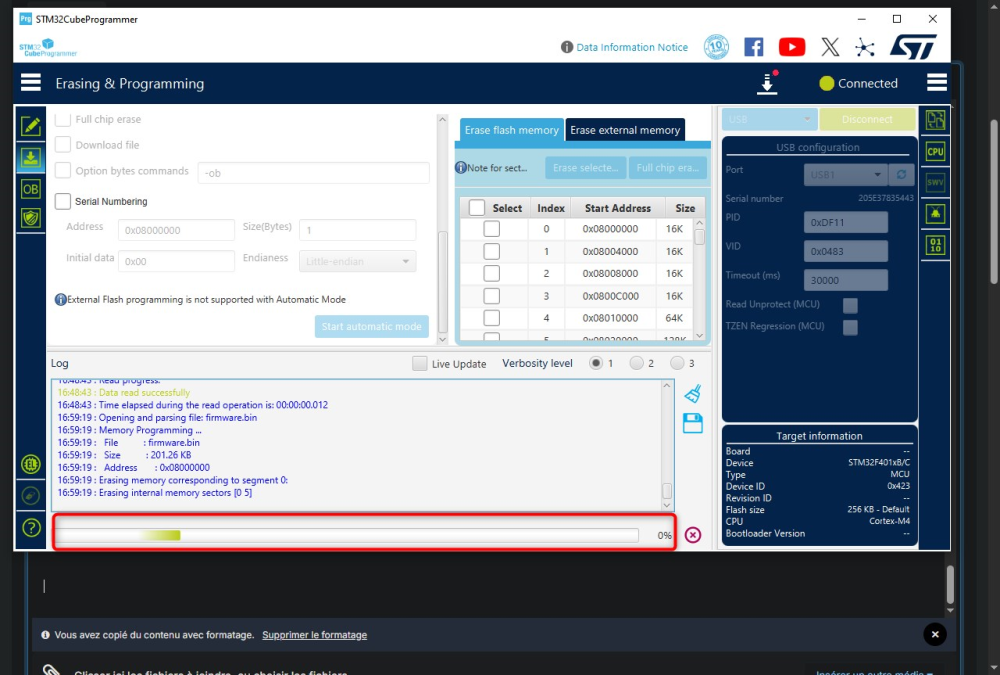
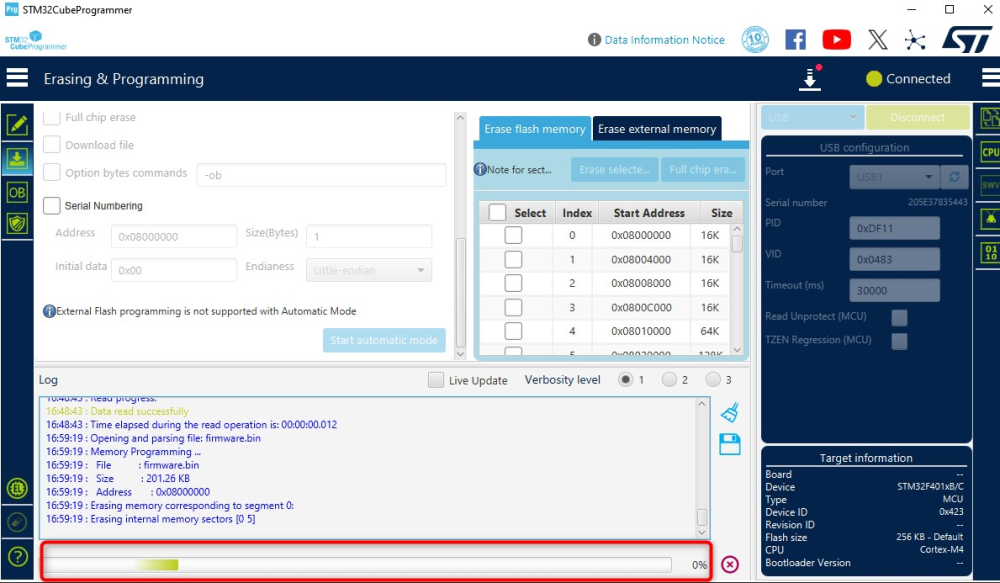
Bonjour à tous, Je viens de recevoir mon BLTouch. Je l'ai installé avec le support ci-joint. Ensuite j'ai fait ces branchement du BL touche avec 5 fils. Ensuite j'ai branché les files par rapport à la carte fille je crois que ça s'appelle comme ça. Marron - Rouge + Blanc P Noir - Jaune S J'ai ensuite téléchargé le fichier de Marlin dans Patched Source https://github.com/MarlinFirmware/Marlin/archive/2.1.x.zip et aussi les fichiers exemple des imprimantes. J'ai copié les fichiers exemples de la carte mère dans le dossier /Marlin. Configuration de PlatformIO dans Visual code Je suis allé sur le site de https://kaminokgy.com/fr/outils/marlin_environnements J'ai copié les informations de cette page vers le fichier platformio.ini dans le dossier Marlin, puis fermer. Préparation des fichiers Marlin Ouvrir le dossier Marlin 2.x Ouvrir les fichiers : Configuration.h Configuration_adv.h Je suis aller dans platformIO pour aller chercher les driver PARTIE 1 : Configuration.h (dans l’ordre) Aller dans Configuration.h Chercher : MOTHERBOARD → J'ai vérifié que j'ai bien la carte Artillery_Ruby J'ai cherché : custom_machine_name J'ai cherché BLTOUCH et l’activer : #define BLTOUCH J'ai cherché NOZZLE_TO_PROBE_OFFSET → J'ai défini le décalage entre la sonde et la buse (X, Y, Z) → Z = 0 ici (offset réglé sur l’imprimante ensuite) #define NOZZLE_TO_PROBE_OFFSET { -42, -7, 0 } J'ai cherché AUTO_BED_LEVELING_BILINEAR et l'activer : #define AUTO_BED_LEVELING_BILINEAR J'ai vérifier le GRID_MAX → Laisser par défaut, conseillé. #define GRID_MAX_POINTS_X 3 J'ai activé pour les 5 fils (important !) #define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN J'ai obligé Marlin à utiliser le BLTouch comme endstop Z pour le homing : #define USE_PROBE_FOR_Z_HOMING J'ai activé Z_SAFE_HOMING Pourquoi obligatoire : Le BLTouch doit faire le homing au centre du plateau, sinon le Z-offset se décale ou échoue. #define Z_SAFE_HOMING J'ai mis rétablir le nivellement après chaque G28 : /** * Normalement, G28 désactive le nivellement à la fin. Activez l'une de ces options pour rétablir l'état de nivellement * précédent ou pour toujours activer le nivellement immédiatement après G28. */ #define RESTORE_LEVELING_AFTER_G28 J'ai mis aussi False pour ces deux champs : #define Z_MIN_ENDSTOP_INVERTING false #define Z_MIN_PROBE_ENDSTOP_INVERTING false PARTIE 2 : Configuration_adv.h J'ai ouvert Configuration_adv.h J'ai cherché BABYSTEP_ et activer : #define BABYSTEPPING et #define BABYSTEP_ZPROBE_OFFSET J'ai cherché PROBING_MARGIN et tout activer → Pour éviter que la sonde aille trop près du bord : #define PROBING_MARGIN 10 Voici les valeurs que j'ai mis #if PROBE_SELECTED && !IS_KINEMATIC #define PROBING_MARGIN_LEFT 40 #define PROBING_MARGIN_RIGHT 10 #define PROBING_MARGIN_FRONT 20 #define PROBING_MARGIN_BACK 10 #endif J'ai activé le menu à propos sur l'écran de l'imprimante #define LCD_INFO_MENU Pour finir j'ai mis en route la compilation en appuyant sur Buid : Voici le résultat : Pour envoyer le fichier firmware.bin : J'ai dû faire un pond au niveau de l'imprimante 3D. Entre le 3v et boot0. J'ai déconnecté les deux nappes en dessous du LCD EXT1 et EXT2. J'ai branché juste seulement le câble USB. Ne pas branché le câble d'alimentation. J'ai ouvert le logiciel STM32 Cube Programmer j'ai cliqué sur USB et me connecter Ensuite nous pouvons voir que je suis bien connecté Je suis allé sur Erasing & Programming J'ai cliqué sur Browse en 1 et je suis allé dans le dossier /Marlin-2.1.x\.pio\build\Artillery_Ruby et j'ai choisi le fichier firmware.bin J'ai coché les 2 cases suivantes : Et ensuite j'ai cliqué sur 2 Start programming. Nous pouvons voir qu'il commence à envoyer le fichier sur l'imprimante Vous devez avoir ces messages là Ensuite ça Et enfin Attendre 2 minutes et nous pouvons débrancher le pont et aussi le câble USB. Maintenant j'ai rebranché le câble d'alimentation 220 volts et j'ai allumé l'imprimante. J'ai bien eu la mise à jour du firmware en 2.1.2.5. avec le BLTouch. C'est mon premier flashage de la carte mère. Tout n'est parfait. J'ai une question : Mon Z est très haut, il est à 220 mm de haut. Est-ce que j'ai oublié des choses dans le firmware ? Avez-vous une idée ? Merci Alain BLTouch-holder-V2.stl piastrina-Cut001.stl adj-bltouch-mount-4A-wing-_V2.stl En complément je ne sais pas si il y a tout le message. Vous devez avoir ces messages-là Ensuite ça Et enfin Attendre 2 minutes et nous pouvons débrancher le pont et aussi le câble USB. Maintenant j'ai rebranché le câble d'alimentation 220 volts et j'ai allumé l'imprimante. J'ai bien eu la mise à jour du firmware en 2.1.2.5. avec le BLTouch. C'est mon premier flashage de la carte mère. Tout n'est parfait. J'ai une question : Mon Z est très haut, il est à 220 mm de haut. Est-ce que j'ai oublié des choses dans le firmware ? Avez-vous une idée ? Merci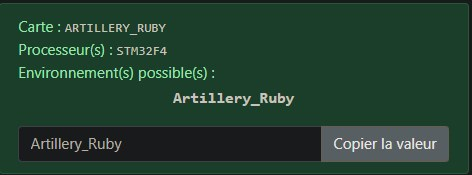


-
Petite présentation de mon rpofil
alainhautdoubs en réponse au topic de alainhautdoubs dans Présentations
Bonsoir là moi j'ai une artilly Hornet et aussi une creative under 3 -
Bonjour, Je suis administrateur systèmes et réseaux mais débutant dans l'utilisation de l'imprimante 3D. J' Je voulais dire que je veux devenir un expert dans l'impression et la création de firmware sans être prétentieux. Merci pour ce site qui est une mine d'or.