Sardaukar
-
Compteur de contenus
19 -
Inscrit(e) le
-
Dernière visite
Récompenses de Sardaukar
")





-

diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
davis ne vois pas tout l'objet, juste un point d'orientation : il faut faire des merge des differents pointcloud. c'est assez lourd a faire. les structured light sont plus précis, mais ce n'est pas le même budget @nothing_fr : as tu utiliser les taches que j'ai donné en exemple ( laser, angle, median filter, surface) ? car on dirait juste un scan + build mesh . avec juste ces 2 taches tu n'aurra jamais un resultat exploitable. -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
on vois clairement que tes lasers ne sont pas bien aligner les un sur les autres (on vois des couches). et qu'ils ne sont pas parfaitement verticaux (par exemple la couche verte est a l'exterieur en bas et a l'interieur des autres en haut) en nuage de point, les couleurs doivent se confondre. tu ne dois pas voir de "couche" par couleur comme cela. tu peux corriger un peu cela via la correction matrix, mais il faut etre très precis dans l'alignement des lasers au depart et ils doivent etre parfaitement verticaux. si tu veux eviter des frustrations (je te dit pas combient de fois je l'ai ranger au placart avant d'avoir le coup de main pour le regler;) ), desactive 2 voir 3 lasers dans le firmware. -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
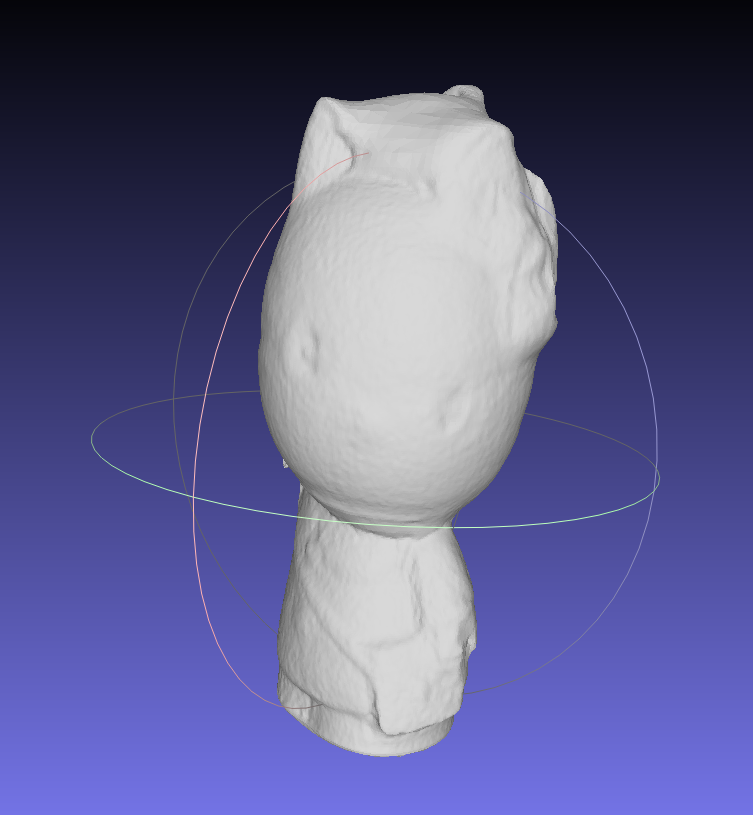
voici une reconstruction avec meshlab (juste utiliser la tache save ply) mais je ne suis pas un pro de meshlab, il doit y avoir moyen de faire beaucoup mieu.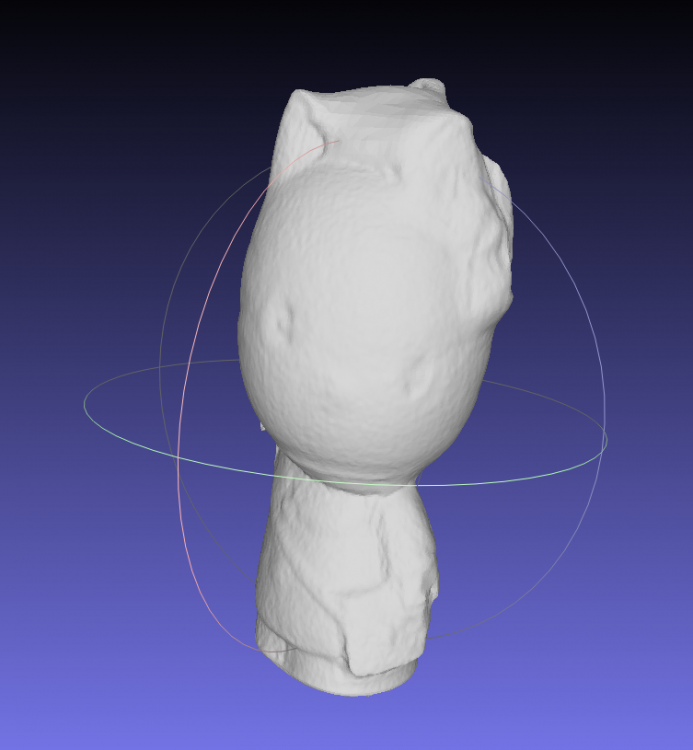
-
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
ps: mon scanner est vampiriser, car j'essaie de faire une version moins configurable du scanner, mais qui necessiterait moins de calibration. car une bonne calibration est vraiment très dur a obtenir. en gros une version plus "build and play", avec une config predefinie, une taille fixe, moins de pieces afin de minimisé la calibration. enfin ca c'est un de mes dizaines de projet en cours quise télescopent -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
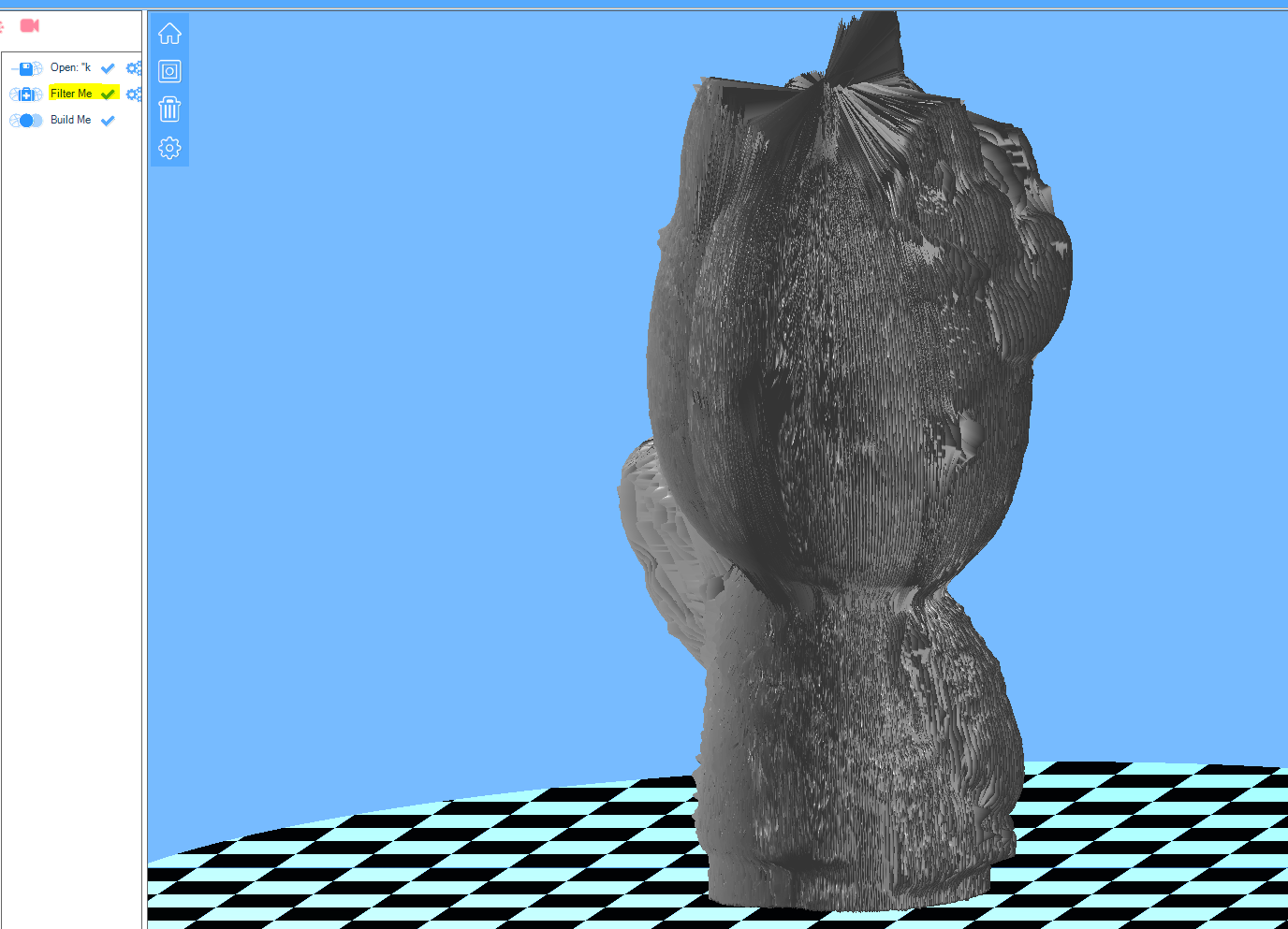
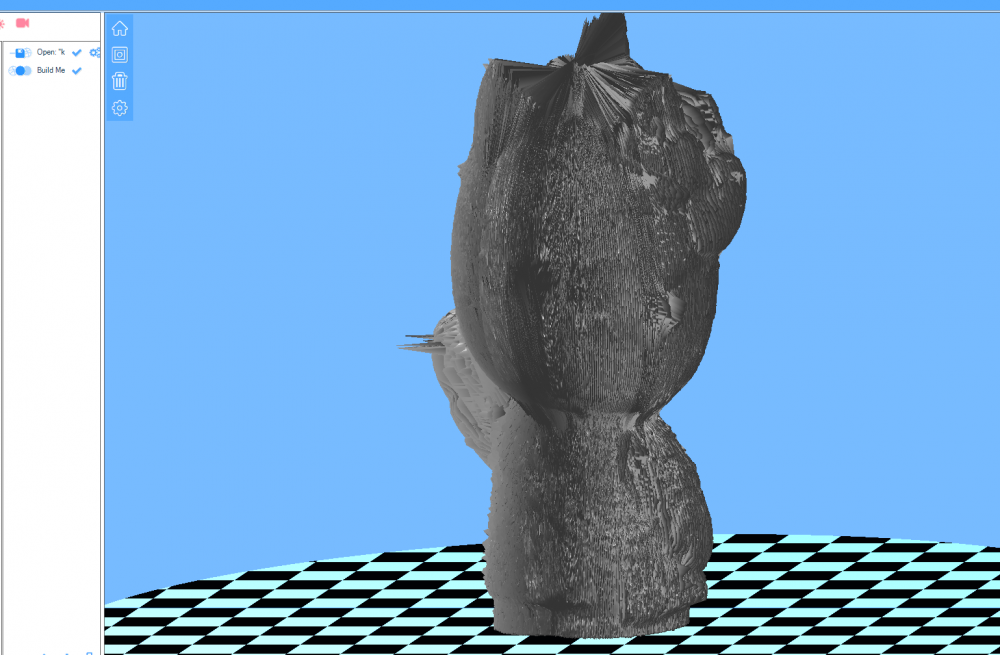
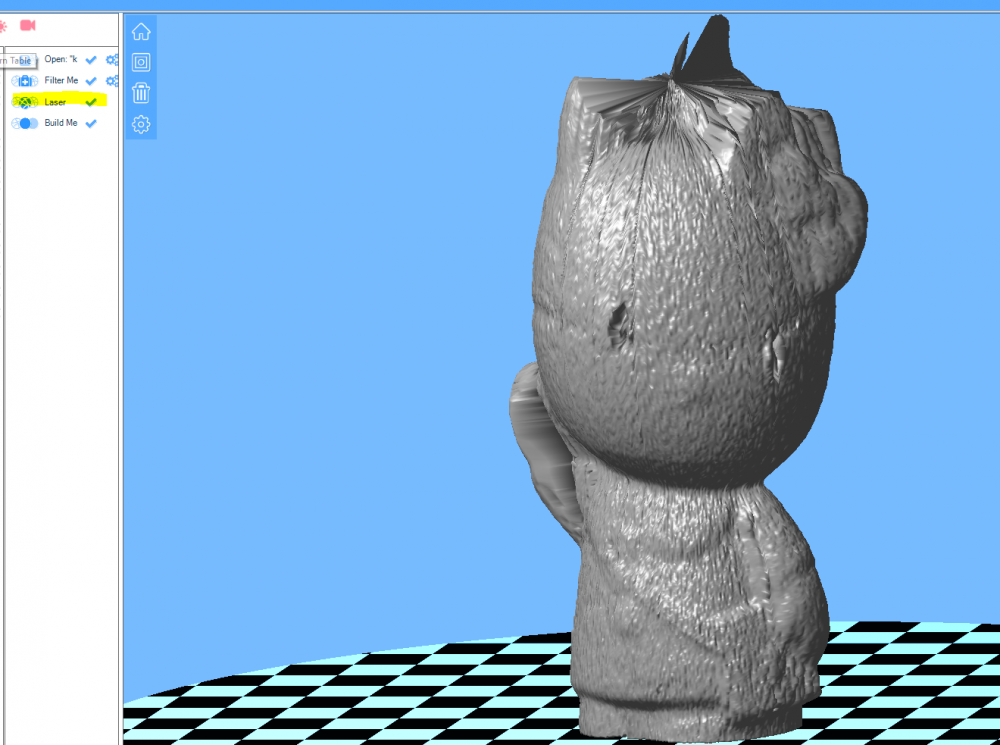
il y a surement moyen de sortir un truc plus exploitable avec ce fichier sar en chipottant avec les options des taches, mais la j'ai juste fait des screen "quick and dirty" pour montrer la fonction des taches. ici le meme en remplacant laser par angle (option 2°)
-
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
heu pour le moment il est demonté car je l'ai vampirisé pour un autre projet. mais il y a un exemple du hello kitty sur thinkiverse. http://www.thingiverse.com/thing:702470 et voici un screenshot d'un fichier sar que j'ai retrouvé sur ma machine : il n'est pas traiter, juste le pointcloud après le scan. je met quelque screenshot pour que voir l'effect des differtes taches : ps: je ne sais pas poster le .sar, car il faut 70Mb. il faut jouer avec les options des differentes taches en fonction des scans


-
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
tu utilise 1, 2, 3 ou 4 lasers ? (1 simple, 4 super compliqué a calibrer) La calibration est la partie la plus difficile. la majorité des problèmes vienne du fait que les lasers ne sont pas parfaitement aligner les uns par rapport aux autres. Car c'est pratiquement impossible a faire. et la difficulté est exponetielle par rapport aux nombre de lasers. Il faut aligner les laser comme expliqué dans le tuto au maxium des possibilités. Ensuite, il faut essayé de faire la matrice de correction pour chaque laser. cela se fait dans la page de "correction". le but du jeux es d'aligner aux max les lasers dans cette page: les 4 lasers doivent etre parfaitement alignée les unes sur les autres. Ensuite, concernant les taches : les plus important sont "laser" et "angle" : ils font un lissage des données : laser prend les lignes de lasers les plus proche (une par laser) et considere que c'est 4 samples du meme endroit : on en fait donc une moyenne. ce qui diminue grandement les erreurs. la ache "Angle" prend tous les lignes de laser dans un interval d'angle et fait la meme chose. ensuite, il y a aussi des filtres pour retirer les points isolé ( iqr, median filter, etc). en gros personnellement, je fait cette suite de tache: Scan Median filter Laser Surface (qui fait un lissage de laplace) build mesh. save STL mais si tu n'est pas satisfait des taches, tu peut juste faire un scan et save ply : et ensuite travaillé dans meshlab. -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
heu non, il n'y a aucune raison que flasher le firmware crame le stepper. tes branchement sont correcte ? cela match avec ce qu'il y a dans le configuration.h ? le firmware ne fait qu'utilisé la librairie super rependue "accelstepper". il ne fait vraiment rien de special. -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
je veux bien, mais comme je ne connait pas la très bien la programmation cross platform, "se pencher" risque de prendre une bonne centaine d'heure.... centaine d'heure que je n'ai pas. de plus je ne possède pas de mac et plus de machine linux, etc mais si la communauté m'offre un mac je veux bien regarder -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
c'est un argument marketing, elle a juste un format 16/9, mais elle n'est pas réellement wide angle. une wide angle a une image déformée quand tu est dans les 20-30cm -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
non, si tu refait le design du support de camera, tu peux utiliser n'importe quel webcam reconnue par directx, du moment qu'elle n'est pas wide angle. (la camera doit juste etre parfairement verticale) -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
ps, je vois que tu es sous mac, est tu au courant que le soft du sardauscan est une application winforms sous windows ? -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
aucun problème pour le mega. pour le pinout tu peux utiliser le même ou utiliser celui que tu veux ( mais il faut que cela corresponde au configuration.h) pour le temps de scan, il y a plusieurs facteur qui entre en compte : nombre de laser, resolution de la webcam, vitesse de la webcam, precision choisie pour le scan etc pour te donner un exemple, (le code de processing d'image a ete grandement optimiser depuis) -
diy Scanner 3D OpenSource - Sardauscan
Sardaukar en réponse au topic de nothing_fr dans Discussions sur les scanners 3D
la configuration depend grandement de la precision du montage (0.5mm c'est enorme pour le calcul). de la verticalité de chaque element (lasers,camera,...) et de ta persévérance ;). Si j'ai un conseil a te donné, commence avec un seul laser. la difficulté de calibration est exponentiel avec le nombre de lasers. avec 4 c'est vraiment vraiment dir. -
merci