iGoX
-
Compteur de contenus
5 -
Inscrit(e) le
-
Dernière visite
Récompenses de iGoX
")





-
Bonjour @MrMagounet, Merci l'info ! @Nibb31, auriez-vous quelques conseils sur la façon dont vous avez relié le runout sensor à la carte Ruby: réutilisation du cable déjà branché sur la ruby ? rallonge faites maison ? câble acheté dans le commerce ? ... Cordialement, iGoX
-
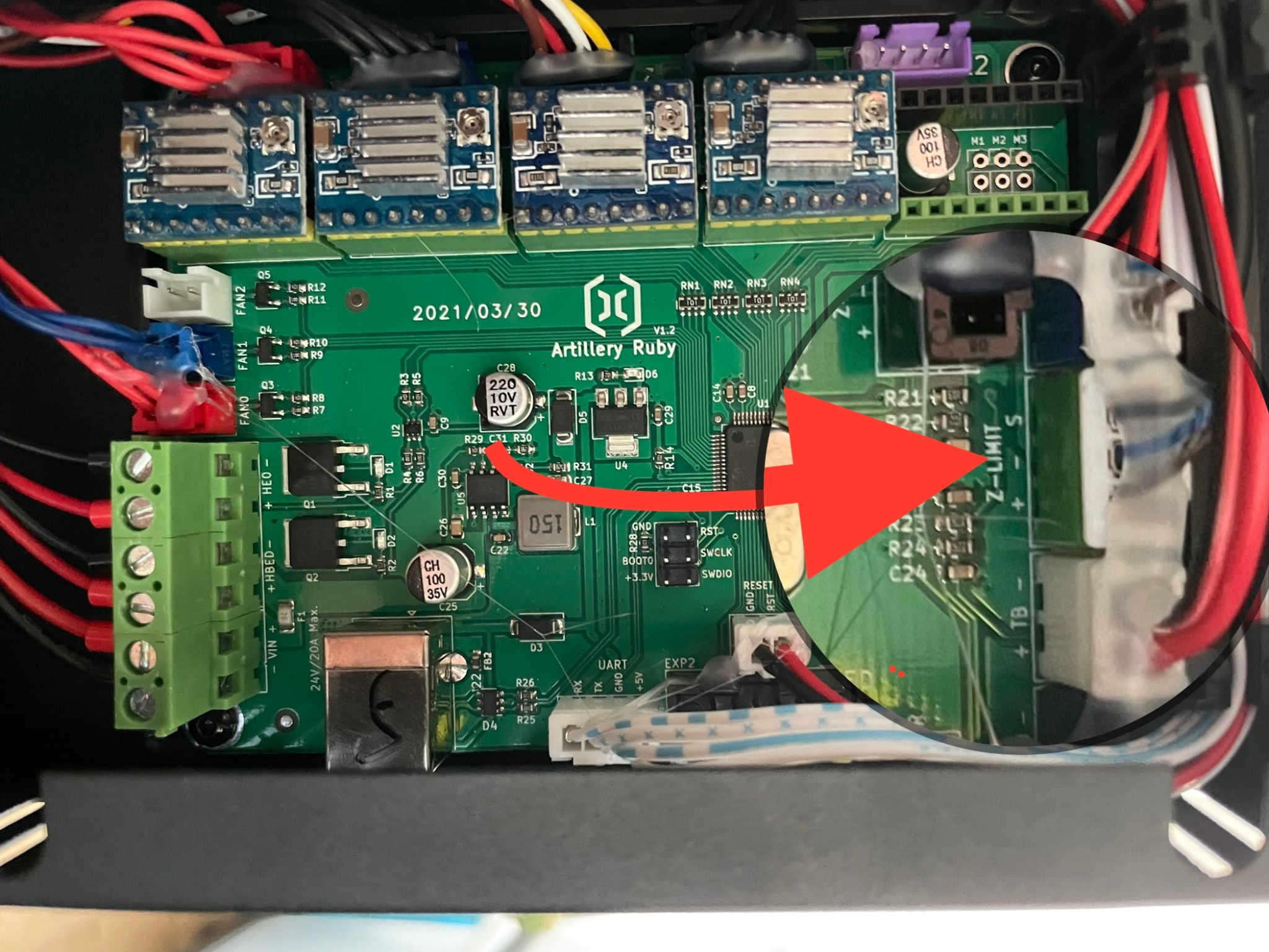
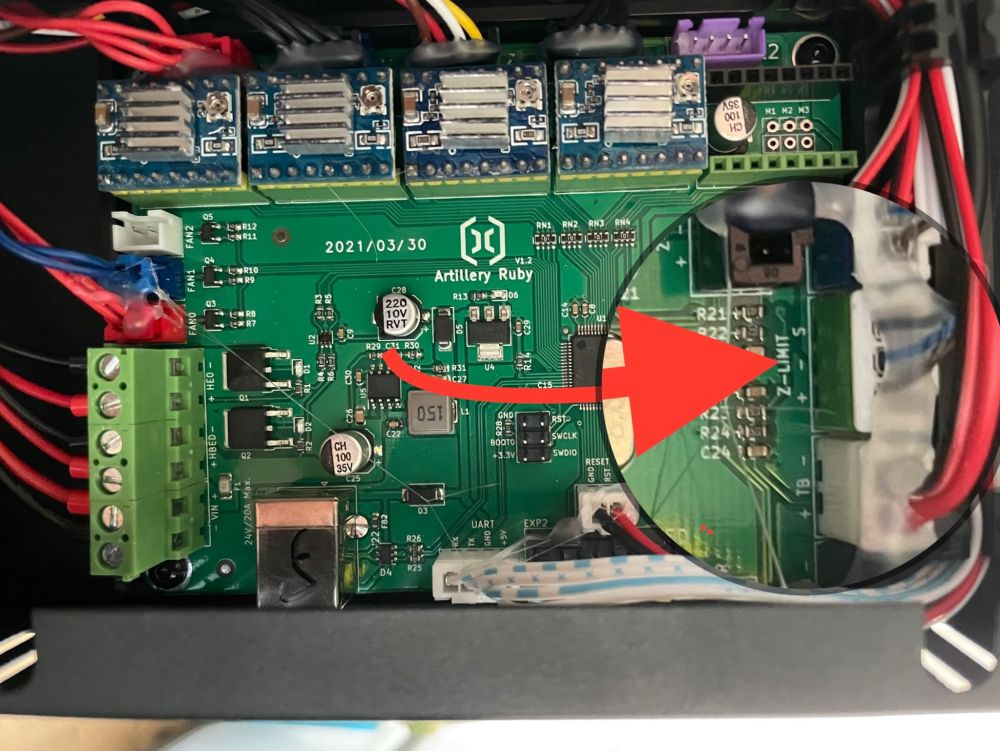
Bonjour @Nibb31, Je viens de passer mon X2 sous Klipper, et je souhaiterais faire la même chose (à savoir brancher le runout sensor directement sur le Z-ENDSTOP de la Ruby). Petit "souci", quand je regarde le câblage déjà en place, le pin PA0 (Z-Limit) de ma X2 est déjà occupé (voir photo ci-après). Et je ne sais pas à quoi est relié ce câble sur la X2. Du coup j'ai un peu peur de faire des bêtises. Donc avant de sortir le hotgun pour débrancher ce cable et le remplacer par le runout sensor, est-ce qu'il vous serez possible de détailler un peu votre manipulation ? Merci d'avance. Cordialement, iGoX PS: merci pour le reverse engineering et le schema. C'est vraiment cool !
-

[Tuto] Comment Flasher le Firmware des X2 / Genius Pro / Hornet
iGoX en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Y a pas de honte à aider la communauté, et les journées ne font malheureusement que 24 heures ... Au risque de faire mon "forceur" , investir un peu de votre temps sur une montée en compétence Github permettrait (peut-être...) de réduire "l'overhead" induit par la multiplication des modèles / marques gérés en: centralisant les sources au même endroit permettant aux personnes les plus techniques de contribuer via le système de pull request de builder elles-même leur firmware facilitant la publication des firmwares (une release sur github, un post avec un lien dessus et c'est fait... plus besoin d'upload les fichiers dans Google drive, etc...) Par effet ricochet, ça laisse plus de temps pour d'autres choses... Bref, au plaisir de discuter prochainement avec vous. Cordialement, iGoX -
[Tuto] Comment Flasher le Firmware des X2 / Genius Pro / Hornet
iGoX en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Bonjour, C/ et B/ : merci pour les précisions. A/ : Auto-réponse... Faute de gros nOOb donc. Il y avait un espace dans le path des sources du firmware. Je retourne m'étouffer dans ma honte Enfin, oui, je suis intéressé par les sources du FW custom 2.0.9.3. D'ailleurs, si je peux me permettre, Github est l'outil est de facto/idéal pour gérer les différentes versions sans qu'on ait à vous embêter (je suis dispo si jamais besoin d'aide avec Github, les commit, la gestion des branches et releases... ) Cordialement, iGoX -
iGoX a changé sa photo de profil
-
[Tuto] Comment Flasher le Firmware des X2 / Genius Pro / Hornet
iGoX en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Bonjour MrMagounet J'ai quelques question concernant votre firmware custom... A/ Concernant le built à partir des sources de votre Github : En effet lorsque je tente de le builder localement avec les sources disponibles sur votre Github, la compilation se termine avec l'erreur suivante: Building C:\SidewinderX2-Marlin2\Sources Firmware Marlin\X2_Marlin_2.0.9.2_MrMagounet\.pio\build\ARTILLERY_RUBY/firmware.hex Usage: arm-none-eabi-objcopy [option(s)] in-file [out-file] Copies a binary file, possibly transforming it in the process The options are: -I --input-target <bfdname> Assume input file is in format <bfdname> -O --output-target <bfdname> Create an output file in format <bfdname> [...] arm-none-eabi-objcopy: supported targets: elf32-littlearm elf32-littlearm-fdpic elf32-bigarm elf32-bigarm-fdpic elf32-little elf32-big srec symbolsrec verilog tekhex binary ihex plugin *** [.pio\build\ARTILLERY_RUBY\firmware.elf] Error 1 ================================================== [FAILED] Took 21.59 seconds ================================================== Environment Status Duration -------------- -------- ------------ ARTILLERY_RUBY FAILED 00:00:21.587 ============================================= 1 failed, 0 succeeded in 00:00:21.587 ============================================= PS C:\SidewinderX2-Marlin2\Sources Firmware Marlin\X2_Marlin_2.0.9.2_MrMagounet> echo "done" >"C:\Users\mbocquet\AppData\Local\Temp\ipc" Voici comment j'ai procédé: Installation de Visual Code Studio (VSC) Dans VSC, installation des plugins "PlatformIO IDE" et "Auto Build Marlin" Téléchargement des sources à partir du Github Dans VSC, ouverture du répertoire Sources Firmware Marlin/X2_Marlin_2.0.9.2_MrMagounet Tentative de build grâce au plugin "Auto Build Marlin" Je suis sous Windows 11 Pro. Par ailleurs, il est à noter que: j'arrive à builder un firmware custom à partir des sources Marlin officielles pour ma Creality Ender 3 dans cette environnement (VSC / Plugins) En revanche, je n'arrrive pas à re-builder le firmware officiel de l'Artillery SW X2 à partir des sources officelles d'Artillery (même erreur que ci-dessus). Une idée de ce qui pourrait générer cette erreur ? B/ Je voulais savoir si votre Github était à jour par rapport au dernier lien Google Drive donné dans le 1er post A.k.a les sources du Github sont-elle bien celles qui ont servi à builder le FW publié le 04/02/2022 ? C/ Je ne suis pas bien sûr de comprendre quel firmware je dois utiliser pour le TFT afin de tirer pleinement partie de votre FW Marlin custommisé ? Le TFT BTT Patch 7 ? Ou bien l'Officiel MKS préconfiguré ? Encore merci pour l'excellent tutoriel ainsi que le travail fait sur le firmware. Cordialement, iGoX