rarnomix
-
Compteur de contenus
71 -
Inscrit(e) le
-
Dernière visite
-
Jours remportés
2
Tout ce qui a été posté par rarnomix
-
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
les 2 paramètres que je t'ai indiqué sont en rapport avec la hauteur de la tete par rapport au plateau au départ du G32 et pendant le G32 et en l'occurence des millimètres donc 10 mm , le pin du BLtouch se deploie de 6mm au max donc il y a quelque chose qui ne va pas dans ton fichier . mais je ne sait pas quoi .. -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
tu as testé les 2 paramètres que je t'ai dis plus haut ? -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
il y a aussi ton leveling-strategy.rectangular-grid.initial_height qui est a 5 le miens est a 10 -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
d'accord, essaye en passant la valeur du "zprobe.probe_height" de 5 a 10 dans la section Zprobe de ton fichier de config -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
je viens de regarder ton fichier config tu as fait des doublons de lignes dans les paramètres, en recopiant .. compare avec le miens : # Levelling strategy # Example for 3-point levelling strategy, see wiki documentation for other strategies leveling-strategy.rectangular-grid.enable true # The strategy must be enabled in the config, as well as the zprobe module. leveling-strategy.rectangular-grid.x_size 430 # size of bed in the X axis leveling-strategy.rectangular-grid.y_size 360 # size of bed in the Y axis leveling-strategy.rectangular-grid.size 5 # The size of the grid, for example, 7 causes a 7x7 grid with 49 points. # Must be an odd number. leveling-strategy.rectangular-grid.do_home true leveling-strategy.rectangular-grid.probe_offsets -25,-60,0 # Optional probe offsets from the nozzle or tool head leveling-strategy.rectangular-grid.save false # If the saved grid is to be loaded on boot then this must be set to true leveling-strategy.rectangular-grid.initial_height 10 # will move to Z10 before the first probe leveling-strategy.rectangular-grid.dampening_start 0.5 # compensation decrease point (optional) leveling-strategy.rectangular-grid.height_limit 1 # no compensation to apply after this point (optional) mm_per_line_segment 1 # necessary for cartesians using rectangular-grid -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
ouais là c'est bizarre , pendant le G32 le pin du bltouch devrait stopper le plateau .. mais que le Endstop ne soit pas pris en compte par contre c'est normal. en gros pendant un Home Z c'est le Endstop Z qui arrête le plateau et pendant le G32 c'est le BLTouch qui l’arrête. maintenant pourquoi sur le premier point le bltouch fonctionne et pas sur celui d'apres ?? -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
je viens de voir dans ton config.txt que tu as 2 modes de leveling-strategy d'activé en meme temps. commente par un # toutes les lignes de leveling-strategy.three-pont-leveling qui se trouve juste après la section Zprobe -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
je viens de vérifier sur la mienne il faut absolument que je fasse un M280 S3.0 avant de faire un G32 sinon ma tete se crashe sur le plateau parce que le pin ne s'est pas déployé -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
dans ton fichier config tu as modifié quelque chose au niveau du leveling-stategy depuis que tu l'as mis dans ton premier post ? parce que je viens de le regarder et je vois que tu es en leveling-strategy.delta-grid .... c'est pas bon , c'est pour les machines delta ça. a mon avis (mais je ne connais pas les configs pour cubiques) tu devrais etre en leveling-strategy.rectangular-grid -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
quand tu fait un HOME Z le BLTouch n'est pas pris en compte . il n'y a que ton endstop Z qui est pris en compte . le BLtouch n'est utilisé qu'au moment de faire la palpation du plateau . -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
ok donc il y a quelque chose qui ne va pas dans ton fichier config au niveau du leveling-stategy -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
quand tu envoie des commandes pour déployer et rétracter le pin du bltouch ça fonctionne ? -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
c'est ça ! c'est a inscrire dans ton slicer . je ne sait pas si tu utilise Cura ou simplify3D ou autre ? mais tu peux deja faire un test en envoyant directement la commande G32 via repetier (que je ne connais pas ) -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
dans mon start Gcode j'ai programmé comme ça : G90 ;absolute positioning M106 S127 G28 X Y G28 M280 S3.0 G32 ;Auto level M280 S7.0 et c'est après que je vais avoir besoin de @cmatec pour gerer mes 2 extrudeurs !! mais déjà mon début de start Gcode est bon pour ma machine et il palpe bien mon plateau.. -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
ok donc jusque là tout va bien . pour palper il faut lui donner une commande G32 mais par sécurité garde le doit sur ton bouton power au cas ou il ne descendrait pas son Pin avant !! apres tout depends si tu le fait par ton ecran TFT ou par un soft annexe style repetier si j'ai bien suivi ton sujet . moi par mon ecran TFT il a sa propre procedure et il descends bien le pin avant d'aller palper -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
c'est a dire ? a la mise sous tension il ne fait pas ses 2 allez retour ? -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
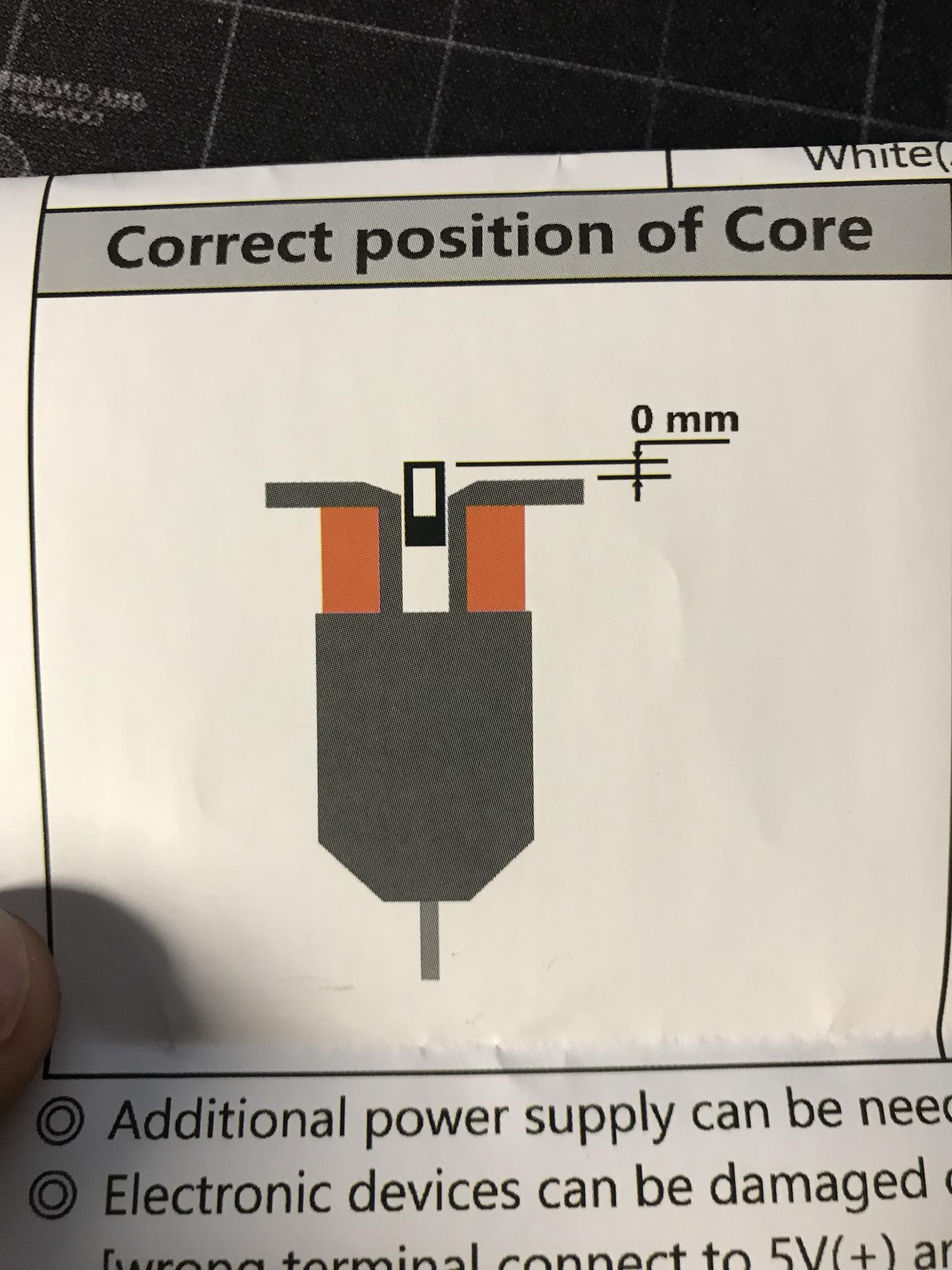
ok, autre question comment est ta vis Halen sur le dessus de ton BLTouch ? est-ce qu'elle n'est pas trop vissé serrée ? normalement la tete de vis doit être a raz du plastique , il me semble avoir lu quelque part sur d'autres sujets que certains membres avaient des effets de magnétisme qui empêchait la tige de descendre. sur la doc du miens c'est précisé. Parce que c'est curieux qu'il réagisse bien au démarrage et au reset mais pas a une info de déploiement du pin, le mettant en défaut systématiquement.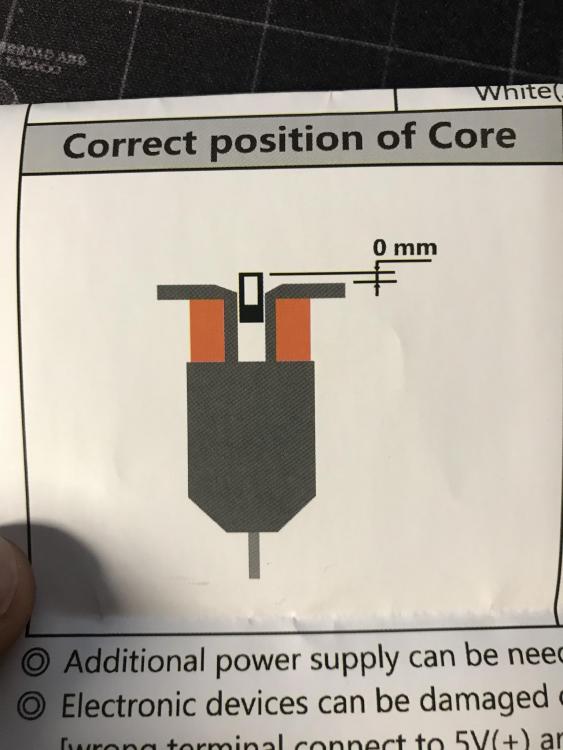
-
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
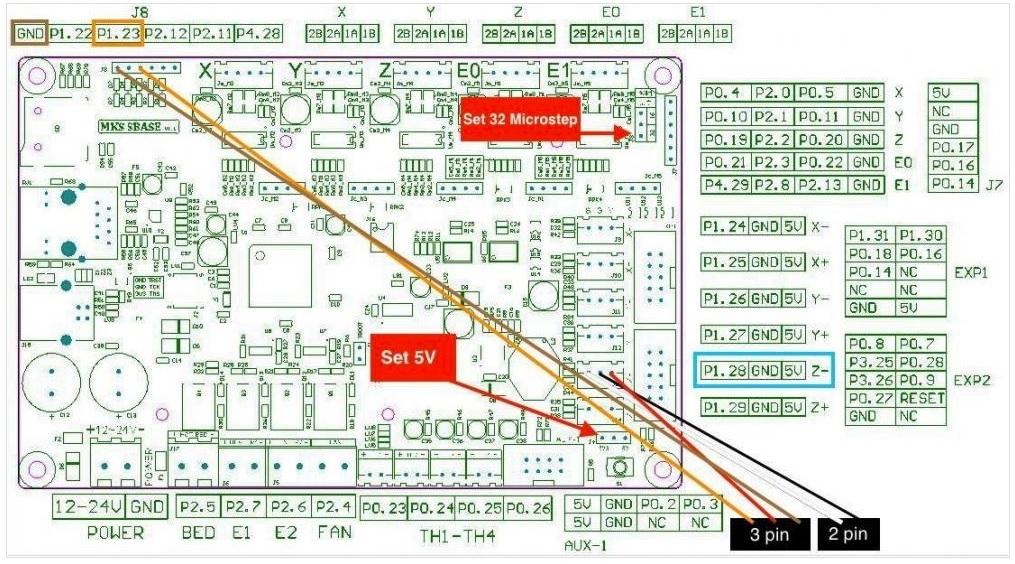
@steph97 maintenant que j'y pense tu as bien passé le jumper J4 sur 5V au lieu de 3.3V comme c'est mis d'origine ? -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
moi quand je démarre ma carte mon BLtouch descends et remonte 2 fois pour l'initialisation. le tiens ne fait pas ça ? -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
là effectivement je commence a me demander aussi , vu que tu as tout fait comme moi et que chez moi ça marche. mais ce qui est bizarre c'est qu'il réagit quand meme au M280 S10.6 -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
et a tout hasard tu n'as pas eu de choc de ton BLTouch contre ton plateau pendant tes essais ? moi j'ai eu et j'ai galéré a redresser parfaitement la tige -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
arf ! tu as mis le dernier firmware dans ta sbase ? moi j'ai pris le firmware.latest.bin https://github.com/Smoothieware/Smoothieware/tree/edge/FirmwareBin -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
le M280 S10.6 c'est pour faire un reset donc normal qu'il s’allume fixe en rouge. essaye le M280 S3.0 le pin devrait decendre -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
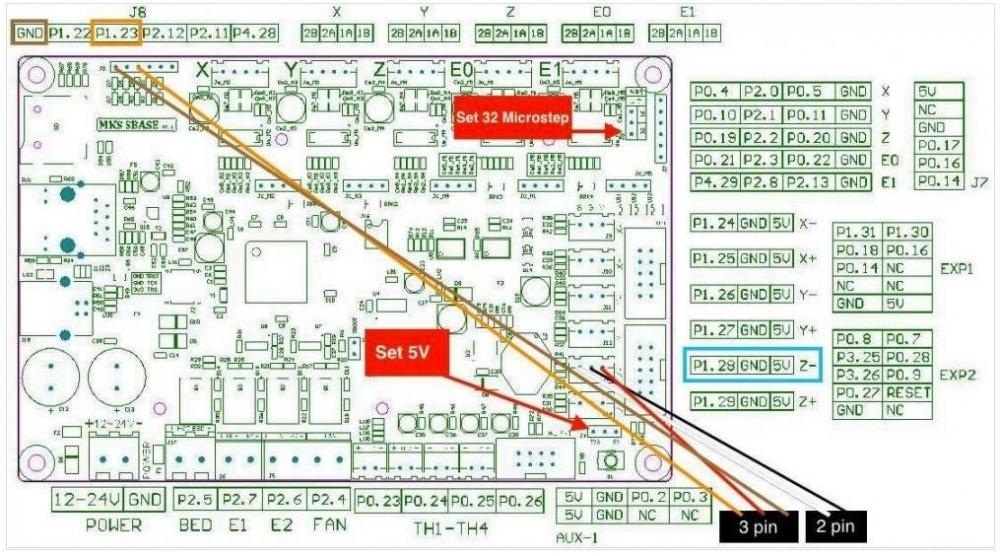
ok mais il est peut être mal paramétré alors . je te met ma partie config.txt pour le Zprobe en dessous, par contre sur les conseils de @pascal_lb j'ai quand meme mis un fin de course mécanique pour ne pas que ma buse vienne heurter le plateau que j'ai branché en Zmax (Z+) pin 1.29 parce-que mon Zmin (Z-) est pris pour le BLtouch et effectivement ça marche beaucoup mieux. ma machine n'est pas une cubique comme la tienne mais une cartésienne. ## Z-probe # See http://smoothieware.org/zprobe zprobe.enable true # Set to true to enable a zprobe zprobe.probe_pin 1.28^ # Pin probe is attached to, if NC remove the ! zprobe.slow_feedrate 5 # Mm/sec probe feed rate #zprobe.debounce_ms 1 # Set if noisy zprobe.fast_feedrate 100 # Move feedrate mm/sec zprobe.probe_height 5 # How much above bed to start probe ## BLTouch Servo Settings ## M280 S3 deploy pin ## M280 S5.5 zpin test mode ## M280 S7 Retract pin ## M280 S8.4 self test ## M280 S10.6 Alarm release switch.servo.enable true switch.servo.input_on_command M280 S3.0 # M280 S7.5 Would be midway switch.servo.input_off_command M280 S7.0 # Same as M280 S0 0% duty cycle, effectivley off switch.servo.output_pin 1.23 # Must be a PWM capable pin switch.servo.output_type hwpwm # H/W PWM output settable switch.servo.pwm_period_ms 20 # Set Period to 20ms (50Hz) - Default is 50Hz et ma partie Endstop : ## Endstops # See http://smoothieware.org/endstops endstops_enable true # The endstop module is enabled by default and can be disabled here #corexy_homing false # Set to true if homing on a hbot or corexy alpha_min_endstop 1.24^ # Pin to read min endstop, add a ! to invert if endstop is NO connected to ground #alpha_max_endstop 1.25^ # Pin to read max endstop, uncomment this and comment the above if using max endstops alpha_homing_direction home_to_min # Or set to home_to_max and set alpha_max and uncomment the alpha_max_endstop alpha_min 0 # This gets loaded as the current position after homing when home_to_min is set alpha_max 4870 # This gets loaded as the current position after homing when home_to_max is set beta_min_endstop 1.26^ # Pin to read min endstop, add a ! to invert if endstop is NO connected to ground #beta_max_endstop 1.27^ # Pin to read max endstop, uncomment this and comment the above if using max endstops beta_homing_direction home_to_min # Or set to home_to_max and set alpha_max and uncomment the alpha_max_endstop beta_min 0 # This gets loaded as the current position after homing when home_to_min is set beta_max 4180 # This gets loaded as the current position after homing when home_to_max is set gamma_min_endstop 1.29^ # Pin to read min endstop, add a ! to invert if endstop is NO connected to ground #gamma_max_endstop 1.29^ # Pin to read max endstop, uncomment this and comment the above if using max endstops gamma_homing_direction home_to_min # Or set to home_to_max and set alpha_max and uncomment the alpha_max_endstop gamma_min 0 # This gets loaded as the current position after homing when home_to_min is set gamma_max 5500 # This gets loaded as the current position after homing when home_to_max is set -
32 bits Aide endstop optique et capteur d'auto nivellement et MKS SBASE
rarnomix en réponse au topic de steph97 dans Électronique
salut, je viens moi aussi de passer pas mal d'heures a faire fonctionner mon BLTouch sur ma Sbase. pour commencer moi je l'ai branché comme sur la photo . c'est ce que tu as fait aussi ?