ubutu
-
Compteur de contenus
64 -
Inscrit(e) le
-
Dernière visite
Récompenses de ubutu
")





-
salut voila des photo de la modif marche bien pas de soucis particulier https://www.thingiverse.com/thing:2856027 cordialment
-
salut juste pour vous donnez des nouvelle de ma kossel j ai mis les tmc il y a un moment deja la j ai mis 1 Set Chimère Extrudeuse Double Buse À Distance complet Kits 0.4mm 1.75mm Double Tête Multi-Extrusion V6 Double tête D'impression 3D Imprimante ca marche bien il faut refaire la base de la tete et configurais le marlin moi j ai un marlin qui marche bien apres il exite pour les puriste klipper avec un razberry on peut monter a 150 mms en print mais bon c est pas pour vous je pense trop de modif et ca vient de sortir ca remplace le marlin boone journee a vous


-
salut regarde que les moteur chauffe pas trop sur une longue periode moi je serais toi je baisserais un peut la tension mais ce st moi
-
merci stef mais bon moi je les et acheter pour le bruit apres tu doit avoir raison mais bon je suis a 0.8 et elle va bien elle chauffe pas ce st ce que je voulais
-
re moi j ai rien souder apres peut etre que je suis un neu neu
-
salut j ai u des soucis j arrive pas a ma co au site pour ce qui ets du firmware vu que tu la deja fait je te donne pas le mien pour les tension les gars ce st fini de jouer avec le tournevis dans la marlin on peut regler la tension des 2208 comme ca pas de probleme après vous faite ce que bon vous semble allez sur d autre forum facebook internetionnal anycubic je vous donne les ligne pour activer la bonne tension sans tournevis #if ENABLED(HAVE_TMC2130) || ENABLED(HAVE_TMC2208) // CHOOSE YOUR MOTORS HERE, THIS IS MANDATORY //#define X_IS_TMC2130 //#define X2_IS_TMC2130 //#define Y_IS_TMC2130 //#define Y2_IS_TMC2130 //#define Z_IS_TMC2130 //#define Z2_IS_TMC2130 //#define E0_IS_TMC2130 //#define E1_IS_TMC2130 //#define E2_IS_TMC2130 //#define E3_IS_TMC2130 //#define E4_IS_TMC2130 #define X_IS_TMC2208 //#define X2_IS_TMC2208 #define Y_IS_TMC2208 //#define Y2_IS_TMC2208 #define Z_IS_TMC2208 //#define Z2_IS_TMC2208 //#define E0_IS_TMC2208 //#define E1_IS_TMC2208 //#define E2_IS_TMC2208 //#define E3_IS_TMC2208 //#define E4_IS_TMC2208 /** * Stepper driver settings */ #define R_SENSE 0.11 // R_sense resistor for SilentStepStick2130 #define HOLD_MULTIPLIER 0.5 // Scales down the holding current from run current #define INTERPOLATE true // Interpolate X/Y/Z_MICROSTEPS to 256 #define X_CURRENT 710 // rms current in mA. Multiply by 1.41 for peak current. #define X_MICROSTEPS 16 // 0..256 #define Y_CURRENT 710 #define Y_MICROSTEPS 16 #define Z_CURRENT 710 #define Z_MICROSTEPS 16 apres moi il sont pas a 0.8volt il faut juste jouer de la calculette j espere que ca vous aide un peut cordialment
-
salut si tu a besoin j ai toutes les infos et les fichier pour mettre marlin a jours pour moi ma machine marche nikel pas de soucis cordialement
-
salut recu hier monter ce soir les tcm 2208 sur ma kossel le jour et la nuit plus de bruit regler a 0.830 et inverser les câbles bon ca fait drôle quand même il va falloir que je m habitue bonne soiree pour 25 euros les 5 cava en plus plus de bruit
-
salut je vous met cette video en francais j espère que ca vous servira ou pas cordialement
-
salut pour toi rien vu qu elle marche bien mais pour moi tous apres ce st toi qui vois les différence avec ta version il y a plus d option changer de filament en route de print ect etc meilleur prise en charge de la température et bien d autre mais met le 1.16 si tu doit changer apres tu peut essayer et voir ce que ca t apporte mais bon si tu connait pas le marlin laisse tomber
-
20171216 **Update to Marlin 1.1.7 ** ***Must have a Z probe.*** DIAGONAL_ROD = 268 filament_runout_sensor = servo3 (leave it if none) enabled: 1.PID Autotune 2.M48 3.Printer Info **Read the 1st reply below** 20171216 ** Mise à jour vers Marlin 1.1.7 ** *** doit avoir une sonde z.*** Diagonale _ tige = 268 Filament _ nécessaire _ capteur = Servo3 (laisser s'il n'y en a pas) Activé : 1. Pid auto 2. Messier 2. 3. Informations sur l'imprimante 1.Load failsafe settings 2.Delta Auto Calibration(with z probe installed)...Voir plus Après avoir téléchargé ce firmware, doit faire : 1. Configuration de la sécurité de chargement 2. Étalonnage Automatique Delta (avec sonde z installée) 3. Niveau de lit (avec sonde z installée) 4. Définir la hauteur du Delta (avec une sonde z installée) 5. Pid Pid (j'ai un peu modifié le paramètre pid, donc vous avez intérêt à le refaire. ) 6. Paramètres du magasin 7. Vérifier si z =0 est la bonne hauteur. Sinon, modifiez z-Offeset et ne la hauteur delta. *** toutes les opérations ci-dessus peuvent être exécutées par le menu acl. Marlin-1.1.7_Anycubic_Kossel_Linear_Plus_Auto_Z_Probe__Rod_Length268_20171216.zip(1).zip
-
salut autant pour moi moi je l’utilise sur ma anycubic lineaire plus
-
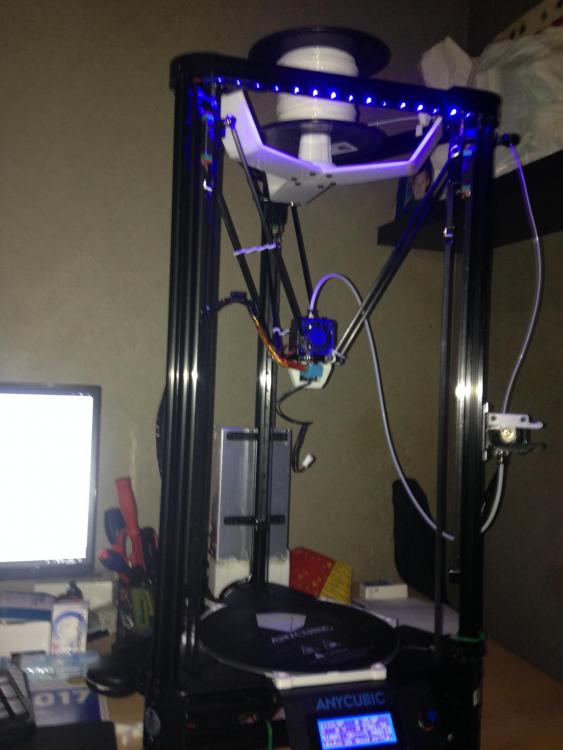
salut des nouvelle de ma machine et mes amélioration support de fin de course pour le nivellage du plateau support bobine en haut inversion de l extrudeur + modification de la pieces cahngement de buse par une v6 + chaussette mise a jour du marlin en 1.16 que ja i recèperais sur un site international tous marche a la perfection me rest plus qua faire les tiges mais jj ai la flemme
-
salut juste pour vous dire que dans le marlin que ja i recuperais il y a des la fonction des TMC 2130 VOILA // @section TMC2130 /** * Enable this for SilentStepStick Trinamic TMC2130 SPI-configurable stepper drivers. * * You'll also need the TMC2130Stepper Arduino library * (https://github.com/teemuatlut/TMC2130Stepper). * * To use TMC2130 stepper drivers in SPI mode connect your SPI2130 pins to * the hardware SPI interface on your board and define the required CS pins * in your `pins_MYBOARD.h` file. (e.g., RAMPS 1.4 uses AUX3 pins `X_CS_PIN 53`, `Y_CS_PIN 49`, etc.). */ //#define HAVE_TMC2130 #if ENABLED(HAVE_TMC2130) // CHOOSE YOUR MOTORS HERE, THIS IS MANDATORY //#define X_IS_TMC2130 //#define X2_IS_TMC2130 //#define Y_IS_TMC2130 //#define Y2_IS_TMC2130 //#define Z_IS_TMC2130 //#define Z2_IS_TMC2130 //#define E0_IS_TMC2130 //#define E1_IS_TMC2130 //#define E2_IS_TMC2130 //#define E3_IS_TMC2130 //#define E4_IS_TMC2130 /** * Stepper driver settings */ #define R_SENSE 0.11 // R_sense resistor for SilentStepStick2130 #define HOLD_MULTIPLIER 0.5 // Scales down the holding current from run current #define INTERPOLATE 1 // Interpolate X/Y/Z_MICROSTEPS to 256 #define X_CURRENT 1000 // rms current in mA. Multiply by 1.41 for peak current. #define X_MICROSTEPS 16 // 0..256 #define Y_CURRENT 1000 #define Y_MICROSTEPS 16 #define Z_CURRENT 1000 #define Z_MICROSTEPS 16 //#define X2_CURRENT 1000 //#define X2_MICROSTEPS 16 //#define Y2_CURRENT 1000 //#define Y2_MICROSTEPS 16 //#define Z2_CURRENT 1000 //#define Z2_MICROSTEPS 16 //#define E0_CURRENT 1000 //#define E0_MICROSTEPS 16 //#define E1_CURRENT 1000 //#define E1_MICROSTEPS 16 //#define E2_CURRENT 1000 //#define E2_MICROSTEPS 16 //#define E3_CURRENT 1000 //#define E3_MICROSTEPS 16 //#define E4_CURRENT 1000 //#define E4_MICROSTEPS 16 /** * Use Trinamic's ultra quiet stepping mode. * When disabled, Marlin will use spreadCycle stepping mode.
-
bonjour je voulais acheter des TMC2208 la marque a avoir une importance ou pas car il y a na a 5.86 euros pieces merci de vos reponse par avance ce st pour une anycubic lineaire plus cordialement