natsamfa
-
Compteur de contenus
105 -
Inscrit(e) le
-
Dernière visite
Récompenses de natsamfa
")





-
test laser
natsamfa en réponse au topic de natsamfa dans Entraide : Questions/Réponses sur les CNC et Lasers
Effectivement c'est celui là. Le vendeur va m'en envoyer un autre et avec celui ci je pourrai comparer ce que l'on doit avoir aux bornes du laser. -
test laser
natsamfa en réponse au topic de natsamfa dans Entraide : Questions/Réponses sur les CNC et Lasers
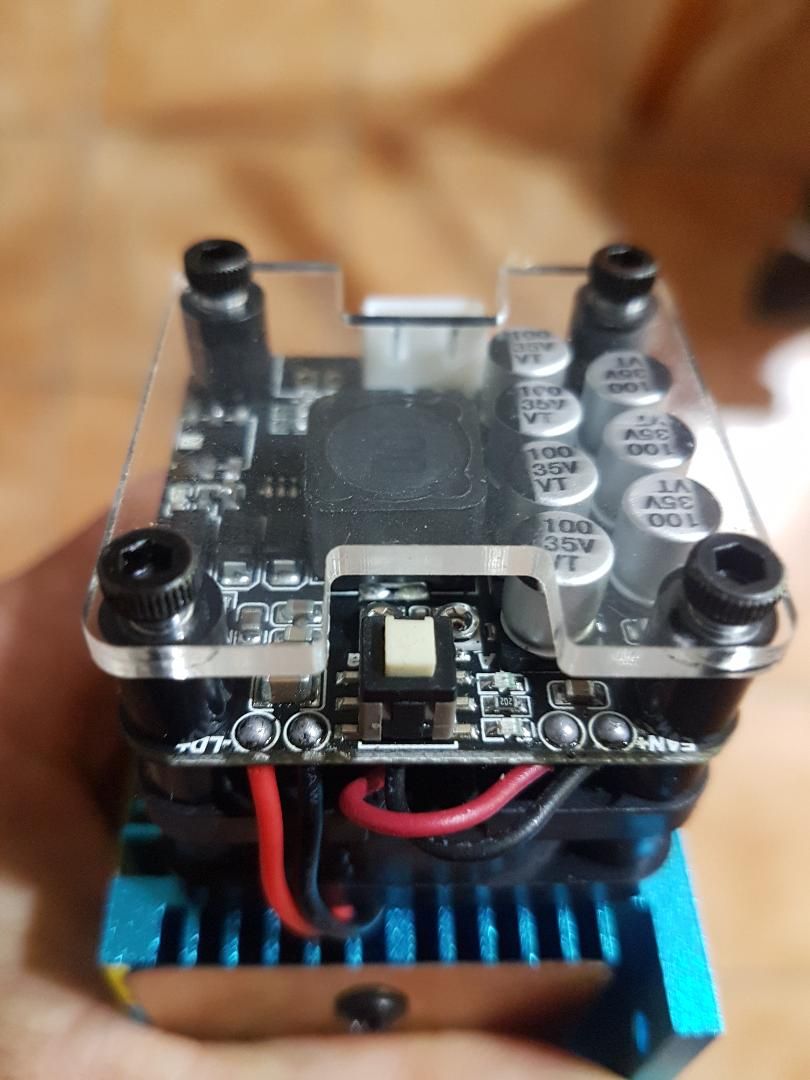
Voilà les photos de la carte laser. A quoi doit on s'attendre à vérifier les deux fils de la diode laser ? Je n'ai rien à ces bornes.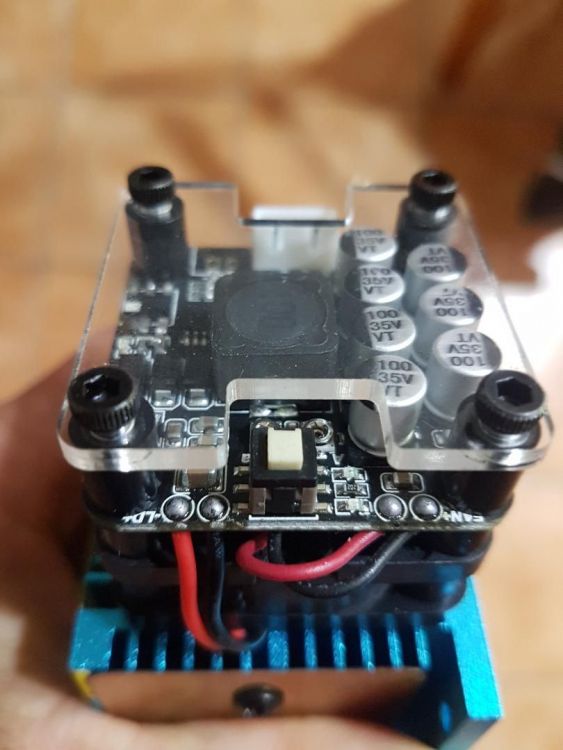

-
test laser
natsamfa en réponse au topic de natsamfa dans Entraide : Questions/Réponses sur les CNC et Lasers
Merci pour ta réponse, En fait c'est un laser 40w chinois sans marque, il a une carte fixé directement dessus. Il y a une carte de commande "Annoytools" qui pilote le laser via PWM et alim 12v ainsi que les moteurs pas à pas. Celle ci fonctionne correctement, j'ai testé les valeurs d'entrées sur la carte laser et je n'ai pas de problème sur les câbles car ils sont avant. Les deux choses qui peuvent être hs sont la diode laser ou la carte laser. C'est pour cela que je cherche à savoir ce qu'il devrait avoir comme tension aux bornes de la diode laser sur la carte. il y a 2 fils. -
Bonjour à tous, Je viens de récupérer une machine pour la gravure laser, le problème c'est que le laser ne fonctionne plus. Il a fonctionné quelque temps et s'est coupé en pleine gravure. Je souhaite tester le laser car à par cela tout fonctionne. Comme il a déjà fonctionné, je mets de coté le test des câbles. d’ailleurs la led sur le bloc laser et le ventilateur fonctionnent. Dans un premier temps j'ai testé l'allumage du laser via le soft et pas d’amélioration. Sur le bloc laser il y a une fiche avec trois connecteurs qui est branchée sur la carte de contrôle. l'alimentation en 12v et le pwm. J'ai vérifié la carte de contrôle , j'ai bien du 12v et de 0 à 5v sur le pwm. J'ai plusieurs questions : Comment tester le bloc laser seul ? Sur le bloc laser, la diode laser est branchée sur une carte électronique mais j'ai aucune tension quand je teste les fils. Savez vous ce que je devrai avoir sur ces fils ? Merci d'avance
-
cura défaut de collage du filament
natsamfa en réponse au topic de natsamfa dans Paramétrer et contrôler son imprimante 3D
Pour mon ABS noir, j'ai réglé la température de la tête à 260° le bed à 90° J'ai une buse de 0.4 et j'ai remis 0.4 de largeur de ligne. Hauteur de la couche 0.2mm J'ai diminué à 50% la ventilation J'ai une avance de 35mm/s Débit à 100% Je n'ai pas fait de test avec la roue libre d'activée ( la prochaine fois ) Voilà si ça peut aider -
cura défaut de collage du filament
natsamfa en réponse au topic de natsamfa dans Paramétrer et contrôler son imprimante 3D
Je viens de faire l'essai avec les paramètres proposés et je suis agréablement surpris de l'amélioration de l’impression en ne changeant que peu les paramètres. J'ai maintenant une bonne accroche de toutes les couches sans délaminage. -
cura défaut de collage du filament
natsamfa en réponse au topic de natsamfa dans Paramétrer et contrôler son imprimante 3D
Cool, je n'étais pas encore allé dans les paramètres expérimentaux, il y a énormément de paramètres supplémentaires. Va falloir regarder cela de plus près. Merci à vous -
cura défaut de collage du filament
natsamfa en réponse au topic de natsamfa dans Paramétrer et contrôler son imprimante 3D
Je suppose que le flow est le débit mais la roue libre, je ne vois pas ? -
cura défaut de collage du filament
natsamfa en réponse au topic de natsamfa dans Paramétrer et contrôler son imprimante 3D
Merci, je ferai un test ce soir -
cura défaut de collage du filament
natsamfa en réponse au topic de natsamfa dans Paramétrer et contrôler son imprimante 3D
Merci pour les réponses, je vais tester avec 260° et 90° de bed et pour la largeur de ligne, je croyais qu'en mettant moins que le diamètre de buse, on avait un chevauchement. Il vaut mieux 0.45mm alors ? Pour la hauteur de couche je suis à 0.2mm -
cura défaut de collage du filament
natsamfa a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous, Je suis en train de reparamétrer Cura pour mon Anet A8 modifiée et j'ai l'impression que le filament ABS ne se colle pas bien sur la couche inférieure. J'ai déjà joué sur la température et pas vraiment d'amélioration. La machine est dans un caisson J'ai une buse en 0.4 avec une largeur de ligne réglée sur 0.35; 240° tête et 70° de bed; une vitesse de 35mm/s. Avez vous des conseils pour améliorer la situation ? Sur quels paramètres jouer ? Merci d'avance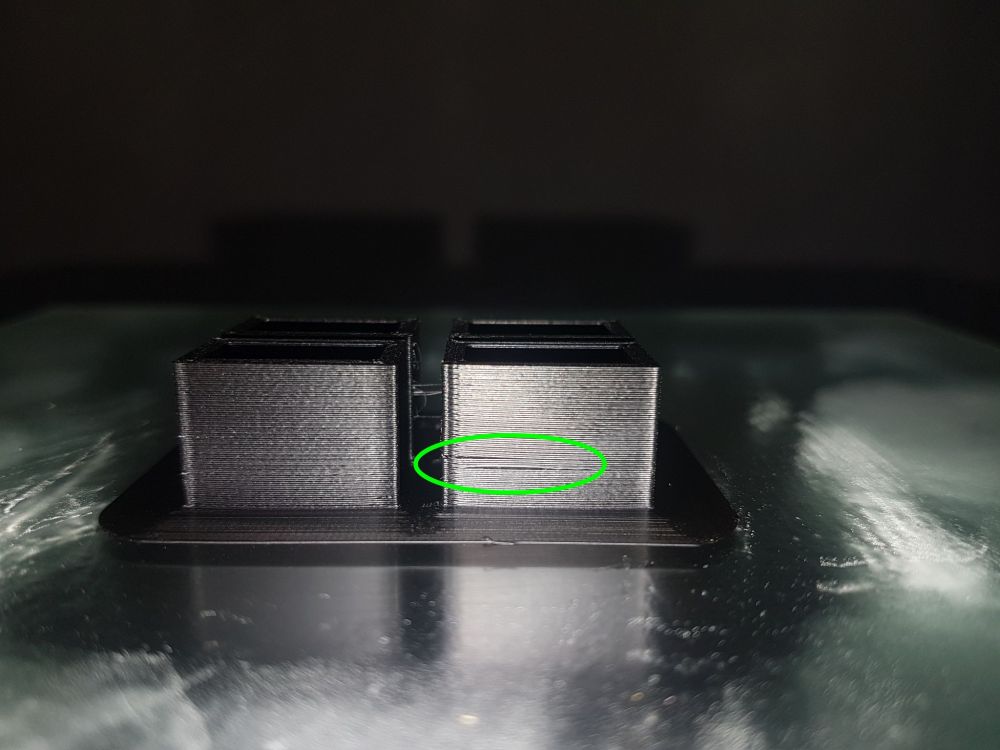
-
BIGTREETECH SKR 1.3 32bit et MARLIN 2.0
natsamfa en réponse au topic de lion02 dans Discussion sur les imprimantes 3D
Bien sur que je l'ai regardé et plein d'autres. Je pense avoir réussi à le faire fonctionner. Ce que j'ai de différent par rapport à la vidéo, c'est que j'ai gardé ces lignes comme ci-dessous et maintenant, cela fonctionne. Allez comprendre .... 831 #define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN 849 //#define Z_MIN_PROBE_PIN 32 A force d'avoir joué plein de paramètres, c'était ceux qui je pensais être sûr. J'attends de recevoir mon dernier stepper et je serai prêt pour faire le premier print. Il me reste encore à imprimer un support de bobine mais ça sent bon. Encore merci pour ton aide. -
BIGTREETECH SKR 1.3 32bit et MARLIN 2.0
natsamfa en réponse au topic de lion02 dans Discussion sur les imprimantes 3D
je viens d'essayer de modifier quelques param dans configuration.h mais sans succès. 655 false-> true #define Z_MIN_PROBE_ENDSTOP_INVERTING 1693 sup // #define ENCODER_PULSES_PER_STEP 4 1716 sup // #define REVERSE_ENCODER_DIRECTION -
BIGTREETECH SKR 1.3 32bit et MARLIN 2.0
natsamfa en réponse au topic de lion02 dans Discussion sur les imprimantes 3D
J'ai une SKR 1_3 -
BIGTREETECH SKR 1.3 32bit et MARLIN 2.0
natsamfa en réponse au topic de lion02 dans Discussion sur les imprimantes 3D
Alors j'ai avancé sur le sujet du homing en X Y Z. J'arrive enfin à faire bouger les axes en direction des endstop. Dans ma config, j'ai du mettre mes microswitch en NF et branchés sur GND et S. A partir de là, le Home se passe correctement. yes yes yes Maintenant, j'ai un clone de BLtouch et j'aimerai aussi le configurer aussi, soyons fou !! J'ai branché le bestiau sur la prise servos et endstop Z- ( en partant du coté alim, j'ai le rouge, marron et orange, et pour le endstop, le blanc sur S et le noir sur GND ). Sur Octoprint, je peux faire un test du servo avec la commande M280 P0 S120 ou M280 P0 S160 pour le reset, ça fonctionne. Je suppose donc que j'ai bien branché le capteur. Reste plus que le fichier configuration.h à modifier, voici ce que j'ai modifié comme écrit sur la doc. 831 ajout // //#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN 849 sup // #define Z_MIN_PROBE_PIN 32 887 sup // #define BLTOUCH 1207 sup // #define AUTO_BED_LEVELING_BILINEAR 1359 sup // #define Z_SAFE_HOMING 1693 sup // #define ENCODER_PULSES_PER_STEP 4 1716 sup // #define REVERSE_ENCODER_DIRECTION Mais ça aurait été trop beau pour que ça fonctionne de suite. Quand j'allume la machine, j'ai le Bltouch qui fait ses 2 sorties/rentrées, normal !!! Quand je fais le Home, le Z monte, le X va sur le X0, le Y sur le Y0 au bout d'une seconde, la tête se déplace à la moitié du bed, et la normalement le doigt du capteur devrait sortir mais il reste rentré , le Z descend jusqu'à ce que je fasse un reset sinon j’arrive en butée mécanique. Il doit me manquer un petit paramètre quelque part qui n'est pas bien configuré. Avez vous une idée ? Normalement, c'est la dernière chose qui manque pour que ça fonctionne !!!!!