jmt75
-
Compteur de contenus
79 -
Inscrit(e) le
-
Dernière visite
Visiteurs récents du profil
1 532 visualisations du profil




Récompenses de jmt75
")





-
Bonjour à tous, et particulièrement à pommeverte qui m’a bien aidé depuis le début de ce projet. Question : si je veux que les homing(s) X, Y et Z soient arbitraires, il suffit que je mette M28 X0, Y0 et Z0 en début de Gcode? Sinon je fais des essais et des réglages un peu plus fins en ce moment : - la teinture pour tissu: bof, rien de mieux que la peinture acrylique, et un choix de couleurs misérable, je vais densifier ma peinture acrylique, ça sera parfait en attendant mieux - compte tenu de l’épaisseur du tissu (gabardine), je suis passé à 70° au niveau de la buse et 10 m/minute de déplacement, j’arrive à faire des tracés de 3 mm de large, ça va, et surtout ça imprègne le tissu dans toute son épaisseur - pour éviter les mouvements du tissu, maintenant je le scotche au scotch de peintre, ça a l’air de le faire - j’ai eu plein de problèmes sur mon axe Y jusqu’à ce que je me rende compte que 3 de mes quatre roues étaient desserrées. Roues refixées et écrous collés, j’espère que ça ne va plus bouger - il reste manifestement un problème d’étalonnage de mon axe Y à corriger, je ferai ça tranquillement demain. Mon nouveau système de guidage du Y en revanche fonctionne: une lame de bois latérale qui se clipse sur mes tapis de mousse, et un chemin de roues en alu pour fiabiliser la hauteur de la buse en évitant que les roues s’enfoncent dans la mousse (le chariot fait plus de quinze kg). J’ai aussi fait beaucoup de propre sur mon prototype (tubes de guidage du Z en alu car les tubes acier étaient couverts de rouille, électricité, longueurs et passages de câbles, blocage de vis diverses…), et c’est beaucoup plus fiable. Je me dépêche de faire mes tests car je pars mardi un mois en métropole, et je voudrais bien sortir quelque chose de potable avant de partir. J’ai aussi ma galeriste à satisfaire
-
Je te remercie du tuyau. je relance une création ce week-end.
-
Bonjour, Des nouvelles de mon projet. J’ai validé quelques points à la suite de mes essais: - mon système de chauffe n’est pas très rapide à l’initialisation mais finit par fondre correctement ma paraffine, j’ai simplement considéré que le manchon chauffant fonctionnait en continu, et la buse régule la température finale de la paraffine au moment du dépôt pour contrôler un peu mieux sa viscosité - ma buse transformée à l’aide d’un pointeau fonctionne. L’étanchéité du système de clapet imaginé est suffisante dans la mesure où le Gcode que je génère est ordonné, c’est-à-dire que je passe de la fin d’un trait au début du trait suivant le plus proche, ce qui lui fait faire un G1 de quelques centimètres seulement. En pratique, aucune goutte indésirable n’a le temps de tomber sur le tissu - les traits générés ne présentent pas de lacunes, et font autour de 3mm de large une fois la paraffine diffusée dans le tissu, ce qui correspond à mon besoin - une vitesse de tracé de 3000 mm par minute semble adaptée, je vais tester un petit à petit des vitesses supérieures. Il faut savoir qu’un de mes dessins de 120x170 mm prend environ 24 heures, un gain de vitesse sera donc apprécié - de la garbadine (tissu raide et assez lisse) est bien adapté, facile à maintenir en place et adapté à un usage mural, ce qui est mon but. Un tissu plus mou ne va pas du tout, il est emmené par la buse et glisse. Il sera à mon avis également trop fin pour une tenture, et je n’ai pas prévu d’usage vestimentaire de mes oeuvres. - le support de mon tissu est formé de dalles de mousse pour pourtour de piscine, facile à trouver et a remplacer, pas trop chères, facile à ranger, permettant de grande surfaces extensibles. J’ai ainsi une surface de travail théorique de 160 cm de large (largeur utile de mon robot) et une longueur seulement limitée par la dimension de ma pièce. Aujourd’hui, mon tapis fait 240x240 cm pour pouvoir y installer mes rails de guidage (voir ci-dessous). Petit bonus imprévu : la paraffine déposée fait apparaître le bleu du tapis en transparence, et me permet de voir mon dessin se former, cool. - mon système de gestion de la hauteur du Z par simple pivotement du rail fonctionne bien, permet de relever la buse d’environ 10 mm et offre une précision suffisante pour mon usage Quelques améliorations en cours ou prévues: - indispensable: sécuriser la conservation de cap de l’axe Y. Je vais rajouter des rails de guidage latéraux qui éviteront la lente dérive latérale de mon Y. Je fais ça ce week-end. Il est prévu un système de clipsage de ces rails afin de faciliter le rangement du matériel comme son installation. Je pense que ça évitera aussi que mon robot roule sur son câble d’alimentation ce qui évidemment le décale de son axe. - indispensable: tester la résistance de la teinture pour tissu, ça devrait être quand même plus adapté bien que le choix de couleurs soit plus réduit que les couleurs acryliques diluées que j’ai testées. J’ai ainsi un choix de couleurs important, mais une tenue au lavage moyenne (fort éclaircissement de la couleur). Je pense pouvoir trouver de la teinture en Martinique, à vérifier, alors que les approvisionnements en peinture acrylique sont validés sur l’île. - indispensable: revoir mon processus de décirage, en testant le décirage au fer à repasser malgré la dimension de mes pièces qui font au minimum un mètre carré (ça va en faire du sopalin…). Pour l’instant j’ai testé l’eau bouillante, pas génial car je n’ai qu’une marmite de 10 litres, et attendre que ça refroidisse demande une nuit, c’est long… - prévu : remplacer mes tubes de guidage de Z par de l’aluminium, mes tubes d’acier sont déjà rouillés (80% d’humidité en ce moment en Martinique) - prévu: déplacer mon écran pour mieux le protéger en le plaçant à l’intérieur du robot plutôt qu’à l’extérieur, et faire du propre dans l’électronique Question: peut-on exclure l’axe Y du cycle de homing tout en testant les X et Z et en considérant le Y à 0? Pour l’instant j’utilise un endstop que je clique arbitrairement avant de positionner à la main le robot à son point de départ, c’est un peu bricolo Merci pour vos retours et conseils. A bientôt pour vous montrer mes premières œuvres !
-
Pas tout compris à ce que tu m's dit. Mais après quelques essais, j'en suis arrivé à la conclusion que mon bed étant limité à une température de 150, si je m'approche trop de cette cible, la température peut monter au-dessus (par exemple 155°) et que ça doit bloquer le système. En limitant ma cibleà 130 ou 140°, je n'ai pas le problème. De toute façon, il faut que je repense mon chauffage. Je vais mettre ma bande chauffante périphérique qui a sa propre sécurité à environ 50° en permanent et la buse en appui commandée par la MKS. La limitation à 50° n'est pas un choix, je l'ai constatée en branchant le produit. Je me suis dit que ça suffisait de toute façon, ce qui est vrai à condition d'avoir la patience d'attendre une heure et demi que ça veuille bien fondre. Le chauffage de la buse est censé régulariser la température de sortie de la cire et donc sa viscosité, mais en pratique, je ne peux pas m'en passer pour la mise en température. Mon problème va donc être de trouver un manchon qui chauffe à 100° ou plus et de le contrôler avec la MKS. Les tapis chauffants de plateaux d'imprimantes ne sont pas aux bonnes dimensions, il faut quelque chose comme du 20x30 cm.
-
J'ai trouvé l'origine du problème. En reprenant systématiquement tous mes câblages, je me suis aperçu que j'avais soudé un fil à un mauvais emplacement. J'utilise deux prises aviation pour brancher d'une part le 220v et d'autre part le 24v sur mon chariot. Le problème de ces prises, c'est que comme il faut mettre face à face les fils et qu'elles sont en miroir, c'est assez facile de se gourer, même en faisant attention. J'avais de belles soudures mais aucune résistance entre les deux pôles de ma thermistance. C'était juste un fil pas soudé au bon endroit. Et du coup, la diode s'est allumée et ça s'est mis à chauffer. Je suis content d'avoir trouvé la source du problème, je commençais à me poser des questions sur mes capacités cognitives. Il reste juste un truc bizarre, c'est que ça chauffe pendant quelques minutes et puis soudain la thermistance n'affiche plus la température correcte et reste bloquée à une température. En réinitialisant la carte, tout revient à la normale. Je vais essayer de rester dans des températures autour de 80° pour voir si le problème persiste. Sinon, j'ai imaginé et réalisé un autre système de pointeau, que je vais tester. Au lieu d'utiliser une buse obturée par une tige, j'utilise une buse prolongée par un tube coulissant de 1,5 mm dans lequel j'ai fait une encoche latérale. Quand le tube descend, l'encoche disparait dans la partie étroite du heatbreak et l'étanchéité semble meilleure. Quand le pointeau remonte, la lumière dans la tube est libérée et la cite coule à l'intérieur. Par ailleurs, ça permet une plus longue course au pointeau, pour tenir compte de l'élasticité du tissu. A voir quand la viscosité de la cire sera maitrisée grâce à la maitrise de la température de fonte.
-
Bonjour Lorenzo78 et moi donc ! J'ai encore quelques soucis notamment avec la gestion du chauffage, je pense que ma carte a un problème, mais je vais me repalucher tous les paramètres de Marlin pour en être sûr. Après, il va falloir faire des tests. Pour l'instant, le choix du diamètre de la buse est dicté par ce que j'ai sous la main, il faudra peut-être ajuster celui-ci après avoir maitrisé la température de la cire et donc sa viscosité.. A suivre, donc...
-
Bret a été très décevant en matière de catastrophe, mais comme nous avons été confinés, j’ai pu bosser sur les choses importantes. je vais tester j’ai trouve deux ventilos plus petis en 24v, je vais essayer de les caser oui, je pense que j'en ai un à la maison en métropole, sinon je commanderai ça sur Am… Tu as trouvé, c’est pour (essayer) de faire du batik. Du batik, mais quel batik! Dès que j'ai fait mon premier test, je te montre.
-
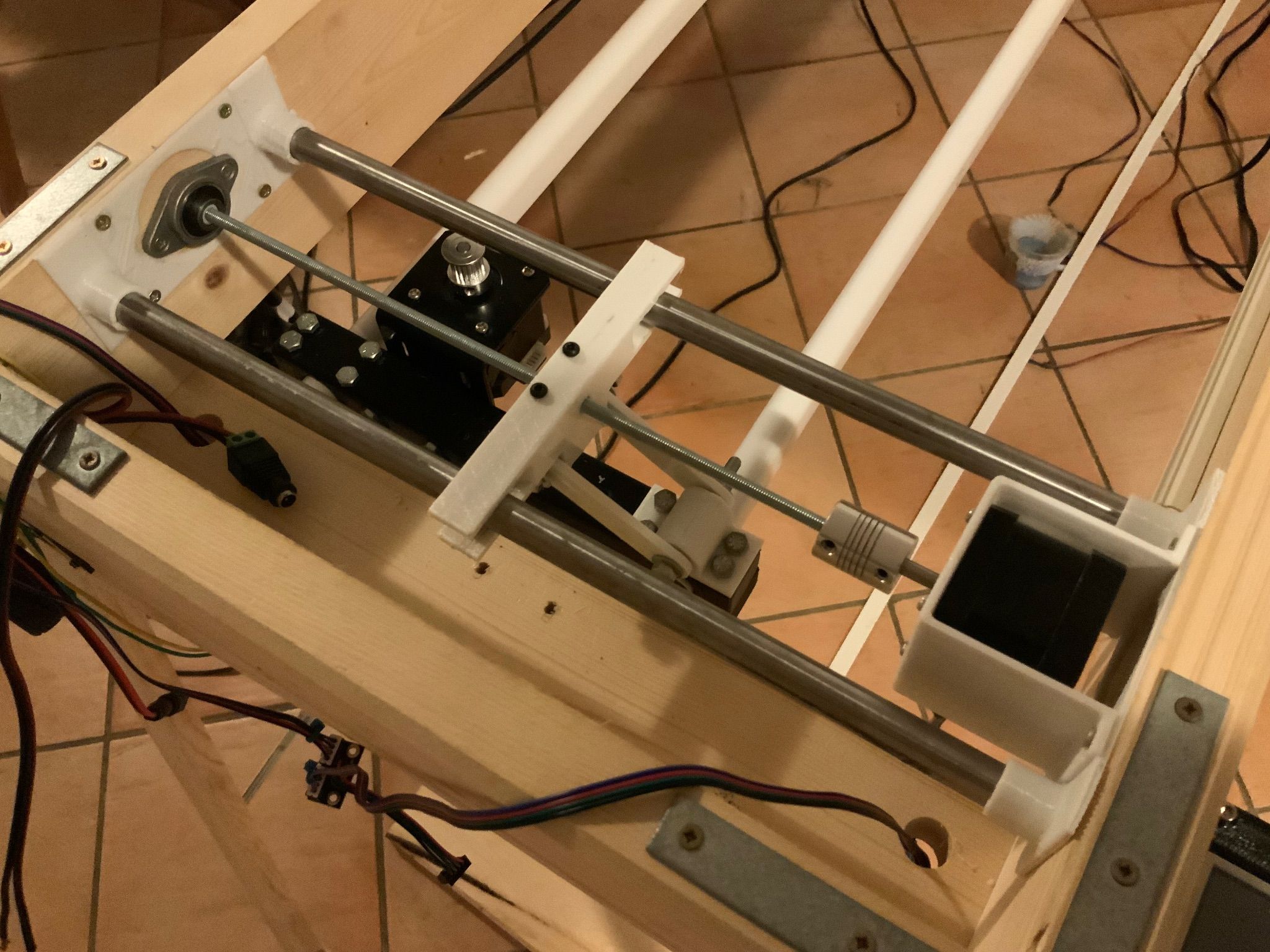
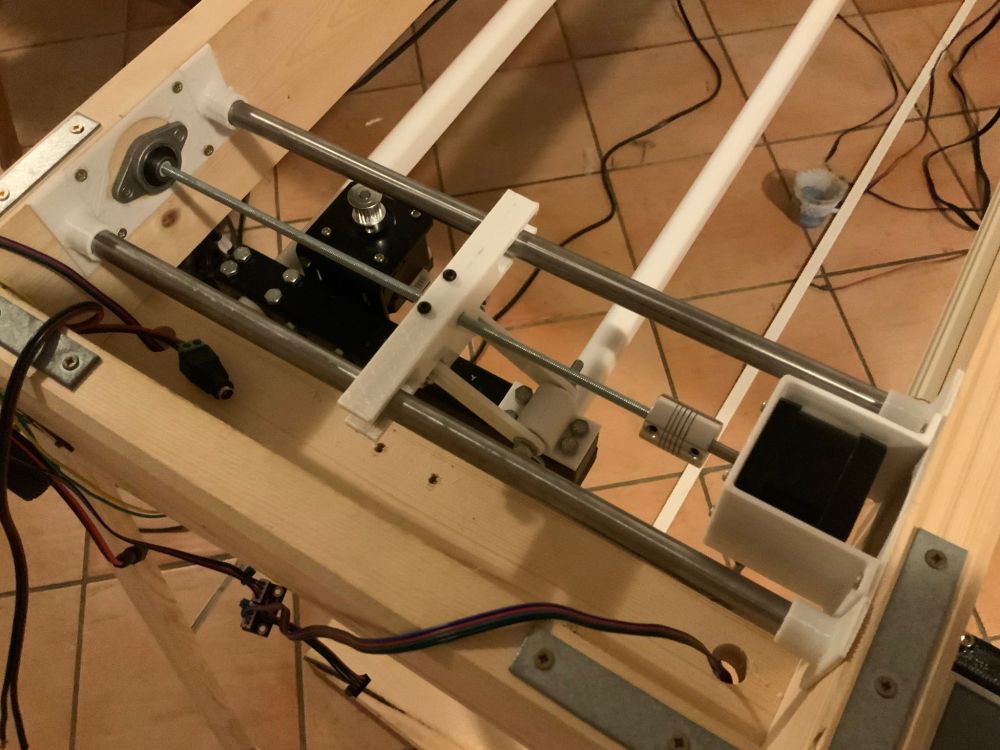
Bonjour pommeverte, J'ai pu avancer sur mon projet et j'ai la satisfaction d'être parvenu: à refaire la mécanique de mon axe Z, et à l'étalonner, et d'y placer un endstop pour le homing. à revoir le passage de cables du chariot X pour augmenter la course en Z (qui se manifeste par une rotation du raill de guidage X). à faire avancer et reculer mon bouzin sur l'axe Y, et surtout, il a l'air d'aller bien droit (en fait c'est comme un 4x4 avec tous les differentiels bloqués, il ne peut en principe pas tourner); j'ai dû passer la vRef des drivers concernés à 1.5v, pour fournir à chacun des deux moteurs montés en parallèle les 0.75v nécessaires à leurs 1.5A de puissance maxi. J'ai aussi augmenté la progressivité de l'accélération pour aider les moteurs à lutter contre l'inertie du robot. j'ai placé un endstop sur le X et paramétré la largeur maxi de déplacement. j'ai mis à jour mon écran TFT32 et il s'est mis à commander les fonctions, mystère mais bon, c'est réglé. Tous les axes sont étalonnés, les vitesses respectives seront réglés par le Gcode, qui sera généré par mes petits programmes informatiques. Ce qui reste à régler: n'ayant pas d'autres carte sous la main et ne pouvant m'en faire livrer une rapidement, j'ai gardé ma carte qui semble défectueuse pour le chauffage, je n'ai pas le choix par conséquent au moins pour l'instant de mettre un thermorégulateur autonome que j'ai une chance de trouver dans un magasin d'électronique où je passerai d'ici le week-end prochain. Donc il faut encore que je branche mes résistances pour chauffer le réservoir de cire. trouver une place pour mon ventilateur de 12 cm, à moins que j'en trouve un plus petit en 24v au magasin d'électronique. a trouver comment paramétrer Marlin pour supprimer la gestion du endstop sur l'axe Y, dont je n'ai pas besoin et qui va m'embêter. à glisser une carte wifi sur mon TFT. Je te joins quelques photos, tu l'as bien mérité. Et le drap à côté du robot est un indice, on va voir si tu trouve à quoi va servir ce monstre.
.jpeg.112fb0b1a68b76c05fe4d2509bcae2f3.jpeg)
.jpeg.5d2f5e054f1a31586c26f6916402b4be.jpeg)
.jpeg.d68ad6e582e441b7fe18dfb7a8d274de.jpeg)
.jpeg.179160113d17560c605f53005b2e8b4d.jpeg)
.jpeg.aaf2b105367c36d873efd900ac893dbb.jpeg)
.jpeg.1608c873586d9ddee334202b7cecec21.jpeg)
-
j’ai testé, mais en fait ça fuit pas mal et surtout c’est compliqué à commander je n’en suis plus à 100 balles près… Haha! Tu n’y es pas du tout. J’ai refait mes axes Z grace à la pause offerte par l’alerte cyclonique d’hier, et je viens de tout monter ce soir, ou quasiment, je vais finaliser demain matin, il me manque une clé à pipe de 8 que j’irai acheter. Voila ce que ça donne maintenant, c’est super robuste, bien démultiplié donc puissant et précis. Reste plus qu’à tester tout ça sauf bien sûr le chauffage, à moins de le brancher pour l’instant en direct, ce qui nest pas exclu.
-
je ne pense pas avoir besoin d’un clapet, le simple fait d’amener la buse au contact va faire monter la tige dans la buse et liberer la cire Laquelle me conseillerais-tu? Au total, j'ai 7 moteurs, 1 pour le x, 2x2 pour le y et 2 pour le z. Ça serait bien que chacun ait son propre driver. J’avais repéré la Manta avec sa carte CB1 pour compacter l’installation. Mais il semble quil faille une version speciale d’OS. Je ne sais pas quoi en penser.
-
C'est exact, c'est un robot de dessin Décidément... Cette carte m'a l'air assez foireuse, je vais peut-être demander le remplacement à Amazon.
-
Pardon, je me suis trompé, je voulais dire les Y. c’est technique ça, et je n'ai pas ce qu'il faut ici, hélas Jy ai pensé, mais on va d’abord essayer de faire marcher comme ça. Je suis en train de modifier mon axe Z. Ce sera désormais des biellettes animées par des vis. Le principe est de faire basculer le rail des X pour lever la buse de quelques mm quand je termine un trait, j’espère que ça suffira, sinon je peux gagner de la hauteur en mettant ma cuve en porte-à-faux, j'ai la place pour ça.
-
J'ai vérifié et revérifié, la seule différence se situe dans le fait qu'il y a des dédoubleurs sur les moteurs Z, mais comme ils sont de chaque côté, je ne vois pas bien, ça devrait aboutir à la même chose. J'ai commenté la ligne #define INVERT_Z2_VS_Z_DIR et ça marche comme je veux, ça ira comme ça pour l'instant. Ni dans les câbles, j'en ai qui ont un ordre des couleurs assez bizarre, d'origine. Les moteurs sont tous de la même marque, mais sont arrivés en deux lots différents, peut-être que c'est la cause. Je n'ai rien bricolé et je pensais d'ailleurs que ça marcherait par défaut. J'ai fait l'essai avec différentes résistances, dont des résistances de buse, rien à faire. Reste à exspérer que ce n'est qu'un problème logiciel. En martinique, tu ne peux rien te faire livrer en moins d'un mois, pas même par Amazon ou AliExpress. Je vais en métropole en juillet, on verra à ce moment là si je n'ai pas résolu mon problème. Oui, c'est une plus-value. Mais avec mon robot de trçage, je communique via CNCjs, ça marche très bien depuis mon canapé Imagine un stylo à pointe rétractable, tu enlèves le ressort et tu laisses coulisser la pointe dans l'extrémité du stylo. Quand tu touches le papier, la pointe remonte dans l'extrémité et libère la cire, quand tu lèves le stylo, la pointe redescend et obture le passage. C'est plus malin que ça, le seul problème est d'avoir une étanchéité correcte et pas de point froid qui peut figer la cire. Bien sûr! C'est un projet encore secret Sinon, mes inquiétudes se confirment quant à l'effort demandé à mes moteurs Z, il faut que je revois ma copie, dommage, je trouvais ça simple et élégant. Je vais sans doute passer par un basculeur piloté par des vis et du coup, je vais avoir besoin que mes moteurs Z tournent dans le même sens !!! Bon, je retourne sur ma conception 3D... A bientôt pour la suite.
-
Bonjour pommeverte, Petit point de fin de journée: j'ai résolu un problème de tremblement des moteurs. En effet, après avoir réglé mes vref, je n'ai constaté aucune amélioration dans mes mouvements. Pourtant j'avais utilisé ces moteurs et leurs cables sur un autre montage, sans problème. Tourne, vire, j'ai fini par comprendre que cela venait de la séquence des impulsions telles qu'elles sont envoyées par la carte et les drivers. J'ai inversé les deux fils centraux (vert et bleu) et ça s'est mis à marcher. Problème résolu. Il reste à inverser les deux moteurs de Z, ils tournent dans le même sens, je vais essayer de le faire par voie logicielle plutôt qu'en inersant encore deux câbles, parce que ça va finir par être un vrai foutoir de connectique. Les drivers chauffaient comme des bêtes pour deux raisons: - la première, c'était ce problème de câblage - la deuxième c'était que les réglages d'usine étaient très optimistes puisque la vref était à 1,5 volts pour des stepper capables d'encaisser 1,5 A J'ai tout mis à 0,8v, ça devrait le faire sans surchauffe. J'ai trouvé un ventilo en 24v en Martinique, je n'en reviens pas, mais je n'ai pas eu le choix de la taille, il est énorme, mais au moins, si ça chauffe, je me les coupe. Concernant le chauffage, je me demande si les 130 watts demandés ne mettent pas le mosfet de la gestion du bed en PLS, ce qui expliquerait pourquoi il n'active pas les résistances. J'essaierai demain avec moins d'appel de courant pour en avoir le coeur net. Quant au TFT, je ne m'en suis pas occupé encore, il faut d'abord que je valide: - les déplacements en Y, car le robot est assez lourd (pas pesé, mais environ 10 ou 12 kg) car il a un bâti périphérique en bois pour être bien rigide en flexion tout en restant un peu souple en torsion pour absorber les irrégularités du sol, et deuxième point important, qu'il va droit dans ses aller-retours, car il n'a pas de rails de guidage sur le Z. - les mouvements du Z, qui s'appuient sur un rail pivotant de quelques degrés pour lever et baisser la buse, il faudra peut-être que je revois la cinématique du truc pour améliorer sa rigueur de fonctionnement. Après étalonnage et pose des endstops, je ferai mes premiers essais, j'espère avant la fin du mois (je travaille en semaine, je ne peux me consacrer à mon projet que le week-end). En tout cas, je te dis un grand merci pour ton aide, j'ai aujourd'hui fait un pas de géant alors que je galérais depuis 15 jours. Cette carte MKS est vraiment très mal documentée quant à ses paramétrages, je m'interroge encore sur la pertinence de ce choix. GRBL a beaucoup d'avantages pour des configurations simples comme la mienne, où il n'y a pas d'extrudeurs, pas des systèmes de chauffage à piloter finement, pas des tonnes de ventilateurs à piloter, etc. Ma seule contrainte est le besoin de puissance pour bouger mon espèce de portique, et on est plus proche ici d'une CNC que d'une imprimante 3D. Je vais essayer de finaliser mon projet avec cette carte, mais je vais continuer à réfléchir à certains choix techniques. Je te montrerai ce que ça donne, promis! Merci encore, pommeverte
-
oui, c’est une option à laquelle j’avais pensé pour fournir un 24v à partir d’une carte en 12 volts. J’avais pensé à de simples relais automobiles en 24v, je ne connaissais pas ce type de petits relais. Déjà que c’est bouillant… Bon, je vais quand même vérifier la tension comme expliqué dans le tuto. Mais il faudra peut-être que je passe à des drivers de type cnc, plus costauds. Le bazar est assez lourd et n'utilise pas de vis qui auraient démultiplié l’effort.