


Filofile
-
Compteur de contenus
6 -
Inscrit(e) le
-
Dernière visite


Récompenses de Filofile
")





-
Bonjour Je débute et forcément pleins de questions; Si un propriétaire pouvait me confirmer ce serait sympa: Dans le menu du touch screen Tool/Extrusion Il y a icone In et Out, j'imagine que c'est pour faire tourner le moteur de l'extrudeur et faire avancer/reculer le fil dans le TPE? Chez moi rien ne bouge. J'ai branché le second extrudeur et c'est pareil. Est-ce normal? Dans le menu Tool/Filament Il y a icone Load et Unload. Lorsque je clique/touche il attend que la buse soit à température. J'en déduis donc que c'est par là qu'il faut faire avancer le fil. Du coup ma précédente "affirmation" est fausse? A quoi sert donc le menu Tool/Extrusion? Merci
-
MAJ firmware sur MKS GEN L
Filofile a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour En furetant ici ou là j'ai vus que certaines imprimantes nécessitaient le rechargement des paramètres après une MAJ du firmware. Généralement via le menu de l'écran. Je n'ai aucune option de ce type dans mes menus. J'ai une MKS GEN L V1.0 et j'aimerais savoir si il faut respecter une procédure particulière suite à MAJ. Faut-il éteindre puis rallumer la printer par exemple? -
Inverser Z et Z_MIN_ENDSTOP_INVERTING et capteur inductif
Filofile en réponse au topic de Filofile dans Entraide : Questions/Réponses sur l'impression 3D
Merci de ta réponse Je crois que j'y suis arrivé. J'ai pu lancer un autoleveling et le capteur a fait son taf. Ceci dit, j'ai du mal à comprendre. Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN noproblemo, le nom de la variable est assez explicite. En revanche avec Z_MIN_ENDSTOP_INVERTING et Z_MIN_ENDSTOP_INVERTING... J'ai faillis mettre en remarque le test mais lorsque j'ai vu qu'il était dans SafeSanity.h j'ai laissé tomber. Les deux mentionnés doient avoir la même valeur! C'est perturbant un peu, si on inverse 2 fois ça revient à ne rien faire... Bref, voici les paramètres que j'ai actuellement en 1.1.9: #define INVERT_Z_DIR true #define Z_MIN_ENDSTOP_INVERTING true #define Z_MIN_PROBE_ENDSTOP_INVERTING true #define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN Les offsets je ne suis pas certains, j'ai d'autres soucis/questions.... Encore merci et bons prints à toi -
Inverser Z et Z_MIN_ENDSTOP_INVERTING et capteur inductif
Filofile en réponse au topic de Filofile dans Entraide : Questions/Réponses sur l'impression 3D
Finalement, j'ai inversé une paire de fils de chaque moteurs Z. C'est mieux, lorsque je monte, le capteur fait son taf et me limite un poil dessous la buse. Je peux descendre jusqu'en bas Mais, lorsque je fais HOME, il commence par descendre de ~3cm puis remonte trop haut. Plus haut que lorsque je fais les déplacements moi-même. Si qlqun a une piste... -
Bonjour Je viens de mettre en route ma Flsun Cube et premiers essais. Constatant que le Z était inversé j'ai modifié #define INVERT_Z_DIR false Ok ça règle le problème Maintenant l'autoleveling, d'origine, j'ai un capteur de ce type: Il s'allume bien, le soucis est qu'il fonctionne également à l'envers. Je veux dire qu'il empêche mon plateau de descendre et donc il n'y a pas de limite pour la remontée. Et fatalement ça finit par taper la buse. Facile, je me dis qu'il suffit de modifier ceci: #define Z_MIN_ENDSTOP_INVERTING true #define Z_MIN_PROBE_ENDSTOP_INVERTING true Mais cela ne suffit pas visiblement. Pour tout dire je ne vois pas la différence true/false. Le comportement reste le même Qu'est-ce-que je fais de mal ?? J'ai essayé les différents Marlin 1.1.2, 1.1.4, 1.1.6 (source Flsun) et je suis actuellement avec 1.1.9 récupéré dans groupe Facebook.

-
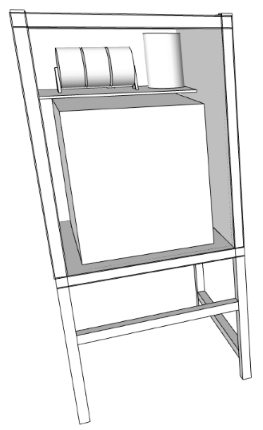
@Dax Tout d'abord merci d'avoir partagé la fabrication de ton meuble. Excellent boulot. J'ai également en projet un meuble. Différent, j'ai contrainte d'humidité... Qu'elles sont les dimensions intérieures? Certaines photos laissent croire que l'imprimante est super à l'aise. Et puis d'autres on dirait que moins... Avec le recul, que conseille tu en terme de surface? Mis à part l'ATX, tu peux indiquer caractéristiques et l'utilité/répartition des tes 3 alimentations? Merci et encore bravo "ça en jette bien". En voyant celle-ci j'ai pensé à Emmet Brown, sûrement la couleur des 3 afficheurs... Perso, je pars sur ce genre de meuble (85x75x150cm ext., tasseaux 38mm). Je pense utiliser de la gaine électrique pour limiter perturbation electro-magnétiques. Certainement dans l'épaisseurs des cloisons.
-
48ans, un peu fada d'informatique depuis un moment. Plus récemment bidouille Arduino, Espxx. J'attends ma 1ère 3DPrinter, une Flsun Cube.