Chercher dans la communauté
Résultats des étiquettes.
-
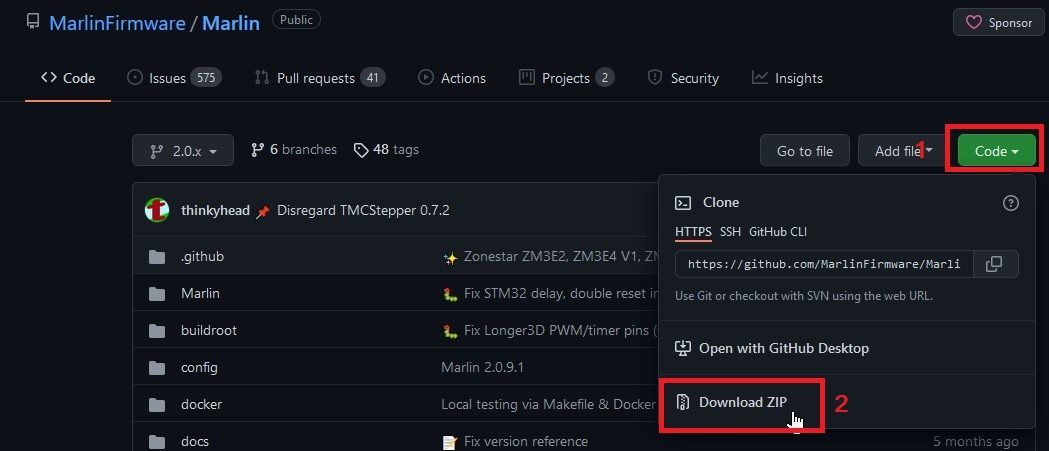
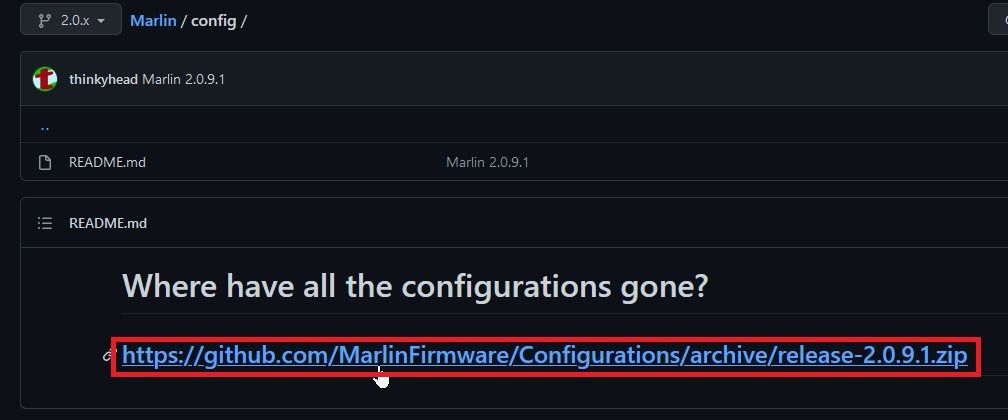
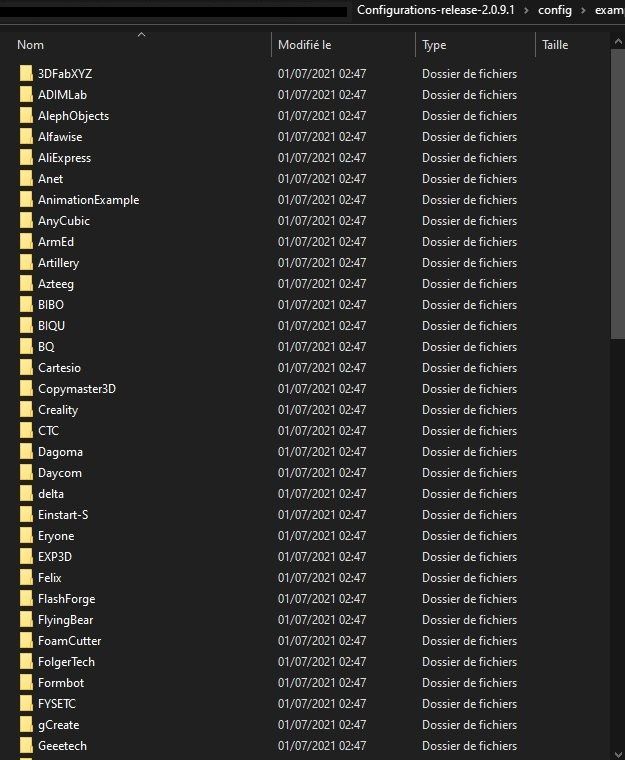
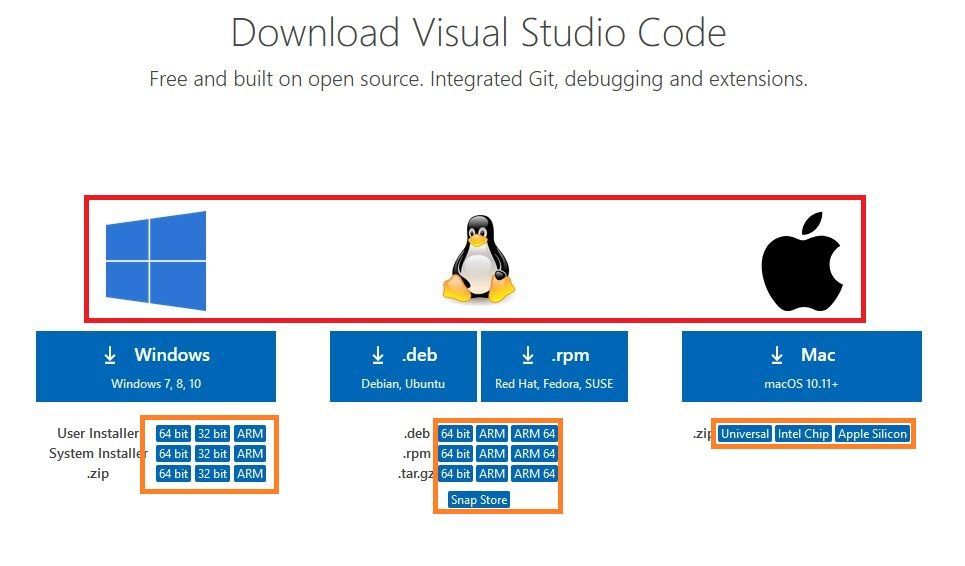
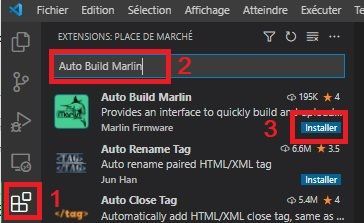
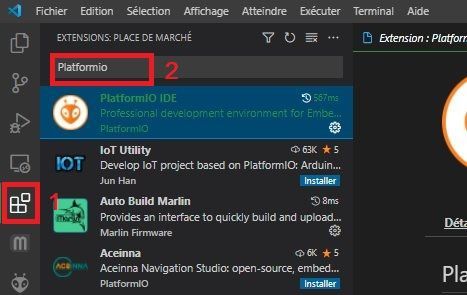
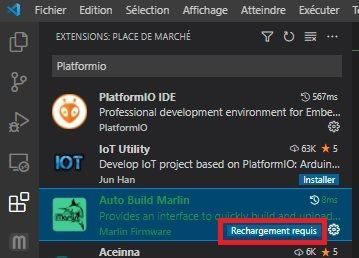
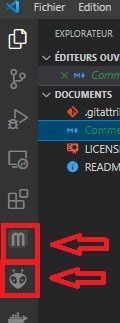
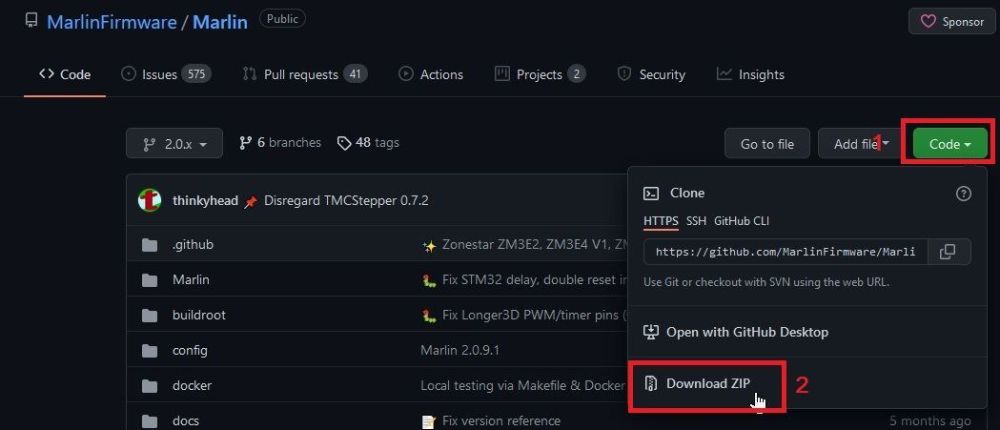
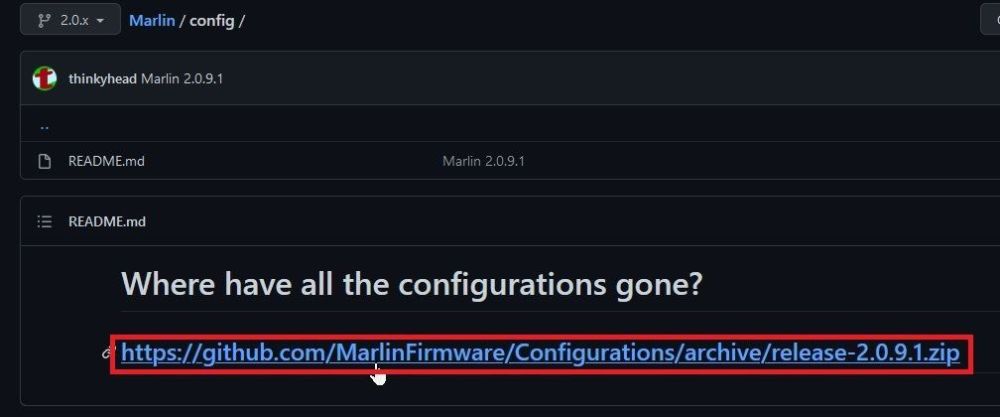
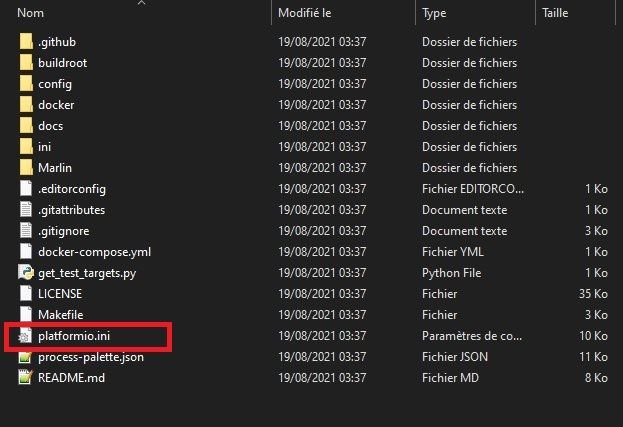
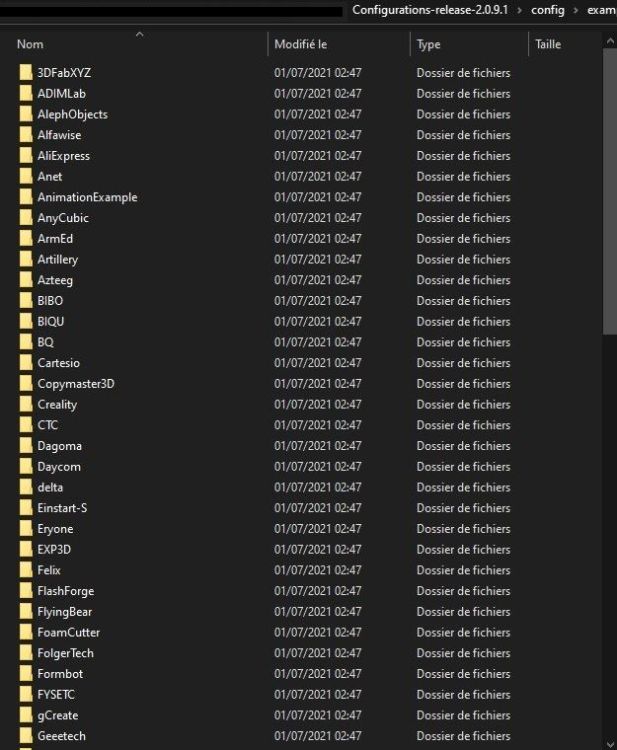
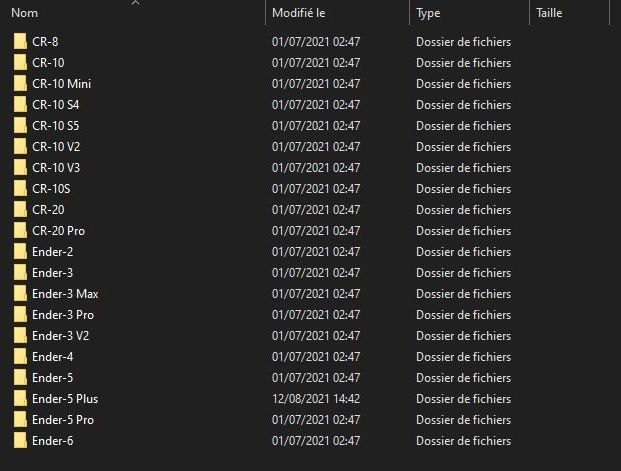
 Ce tutoriel s'adresse à ceux voulant faire leur propre firmware basé sur Marlin. Afin de faire son propre firmware, il est essentiel d'installer correctement son environnement de développement (chaine de compilation). Pour un Marlin, version 1, il était recommandé d'utiliser le logiciel Arduino pour faire les modifications des fichiers de configuration puis réaliser la compilation et éventuellement le flashage du firmware obtenu si l'imprimante était reliée à l'ordinateur via un câble USB. Depuis la version 2 de Marlin, l'environnement de travail préconisé est différent, même s'il reste possible de compiler son propre firmware avec un Marlin 2.x pour des cartes 8 bits avec l'environnement Arduino IDE. Ce que je décris par la suite est ma manière de travailler qui jusqu'à ce jour m'a permis de compiler de nombreux firmwares (pour mon propre usage ou pour celui d'autres membres de ce forum). Passons donc à l'installation des différents logiciels. Installer Git bash Télécharger et installer la version actuelle de Git en fonction de votre OS (Windows, Linux, Mac) Installer Python Télécharger et installer la version actuelle de Python en fonction de votre OS (Windows, Linux, Mac) Comment installer VSC et Auto Build Marlin + Platformio IDE pour compiler Télécharger Visual Studio Code (VSC) à partir d'ici Le choix dépend du système d'exploitation (OS) de l'ordinateur (Windows (7, 8, 10) / Linux / Mac) et de l'architecture (32 / 64bits). Après téléchargement, un double-clic pour lancer l'installation de VSC. Après installation, ouvrir VSCode. Il faudra ensuite installer l'extension «Auto Build Marlin», clic sur le ① indiqué dans l'image ci-dessous, saisir Auto Build Marlin (ABM) dans ② puis cliquer ③ Installer pour finaliser l'installation. Normalement, l'installation de «ABM» devrait avoir également installé en dépendance Platformio IDE. Si ce n'était pas le cas : Installer l'extension «Platformio IDE», comme pour ABM, clic sur le ① indiqué dans l'image ci-dessous, saisir Platformio IDE dans ② puis cliquer ③ Installer pour finaliser l'installation. Après installation de ces extensions, il faudra probablement effectuer un rechargement pour que ce soit pris en compte via Recharger Une fois ces installations réussies, après un nouveau rechargement, Auto Build Marlin et PlatformIO sont installés et apparaissent dans la liste des extensions (plugins) dans la partie gauche de VSCode. Un clic sur l'icône du plugin PlatformIO (①) (une tête de fourmi (certains y voient un «alien») pour le sélectionner, puis un dernier clic sur ② Ouvrir un projet (Open Project) pour ouvrir le projet et pouvoir commencer à travailler avec. Pour compiler un Marlin, il faut au préalable avoir récupéré les sources fournies sous forme d'une archive compressée Décompresser l'archive récupérée à l'issue du téléchargement, un dossier Marlin-2.0.x doit avoir été créé. C'est ce dossier qu'il faut indiquer lors de l'ouverture du projet via Platformio (le fichier platformio.ini doit y être ainsi qu'un dossier Marlin contenant les fichiers sources qui serviront lors de la compilation) Il est recommandé de récupérer les exemples de configuration d'imprimantes proposés par l'équipe du Marlin. Une fois cette archive décompressée, le dossier config/examples contient de nombreux constructeurs et modèles d'imprimantes Exemples du fabricant Creality : Pour une Creality Ender3, il n'y a que l'embarras du choix en fonction de la carte mère installée sur l'imprimante. Il suffira de recopier les fichiers configuration[_adv].h et éventuellement les [boot|status]screen.h dans le dossier nommé Marlin en remplacement de ceux originaux pour se faciliter les étapes liées au paramétrage avant de lancer la compilation Maintenant que l’environnement de travail est prêt, à vous de jouer Bonne(s) compilation(s) et que le filament coule à flot Ce tutoriel est également disponible sur mon dépôt Github
Ce tutoriel s'adresse à ceux voulant faire leur propre firmware basé sur Marlin. Afin de faire son propre firmware, il est essentiel d'installer correctement son environnement de développement (chaine de compilation). Pour un Marlin, version 1, il était recommandé d'utiliser le logiciel Arduino pour faire les modifications des fichiers de configuration puis réaliser la compilation et éventuellement le flashage du firmware obtenu si l'imprimante était reliée à l'ordinateur via un câble USB. Depuis la version 2 de Marlin, l'environnement de travail préconisé est différent, même s'il reste possible de compiler son propre firmware avec un Marlin 2.x pour des cartes 8 bits avec l'environnement Arduino IDE. Ce que je décris par la suite est ma manière de travailler qui jusqu'à ce jour m'a permis de compiler de nombreux firmwares (pour mon propre usage ou pour celui d'autres membres de ce forum). Passons donc à l'installation des différents logiciels. Installer Git bash Télécharger et installer la version actuelle de Git en fonction de votre OS (Windows, Linux, Mac) Installer Python Télécharger et installer la version actuelle de Python en fonction de votre OS (Windows, Linux, Mac) Comment installer VSC et Auto Build Marlin + Platformio IDE pour compiler Télécharger Visual Studio Code (VSC) à partir d'ici Le choix dépend du système d'exploitation (OS) de l'ordinateur (Windows (7, 8, 10) / Linux / Mac) et de l'architecture (32 / 64bits). Après téléchargement, un double-clic pour lancer l'installation de VSC. Après installation, ouvrir VSCode. Il faudra ensuite installer l'extension «Auto Build Marlin», clic sur le ① indiqué dans l'image ci-dessous, saisir Auto Build Marlin (ABM) dans ② puis cliquer ③ Installer pour finaliser l'installation. Normalement, l'installation de «ABM» devrait avoir également installé en dépendance Platformio IDE. Si ce n'était pas le cas : Installer l'extension «Platformio IDE», comme pour ABM, clic sur le ① indiqué dans l'image ci-dessous, saisir Platformio IDE dans ② puis cliquer ③ Installer pour finaliser l'installation. Après installation de ces extensions, il faudra probablement effectuer un rechargement pour que ce soit pris en compte via Recharger Une fois ces installations réussies, après un nouveau rechargement, Auto Build Marlin et PlatformIO sont installés et apparaissent dans la liste des extensions (plugins) dans la partie gauche de VSCode. Un clic sur l'icône du plugin PlatformIO (①) (une tête de fourmi (certains y voient un «alien») pour le sélectionner, puis un dernier clic sur ② Ouvrir un projet (Open Project) pour ouvrir le projet et pouvoir commencer à travailler avec. Pour compiler un Marlin, il faut au préalable avoir récupéré les sources fournies sous forme d'une archive compressée Décompresser l'archive récupérée à l'issue du téléchargement, un dossier Marlin-2.0.x doit avoir été créé. C'est ce dossier qu'il faut indiquer lors de l'ouverture du projet via Platformio (le fichier platformio.ini doit y être ainsi qu'un dossier Marlin contenant les fichiers sources qui serviront lors de la compilation) Il est recommandé de récupérer les exemples de configuration d'imprimantes proposés par l'équipe du Marlin. Une fois cette archive décompressée, le dossier config/examples contient de nombreux constructeurs et modèles d'imprimantes Exemples du fabricant Creality : Pour une Creality Ender3, il n'y a que l'embarras du choix en fonction de la carte mère installée sur l'imprimante. Il suffira de recopier les fichiers configuration[_adv].h et éventuellement les [boot|status]screen.h dans le dossier nommé Marlin en remplacement de ceux originaux pour se faciliter les étapes liées au paramétrage avant de lancer la compilation Maintenant que l’environnement de travail est prêt, à vous de jouer Bonne(s) compilation(s) et que le filament coule à flot Ce tutoriel est également disponible sur mon dépôt Github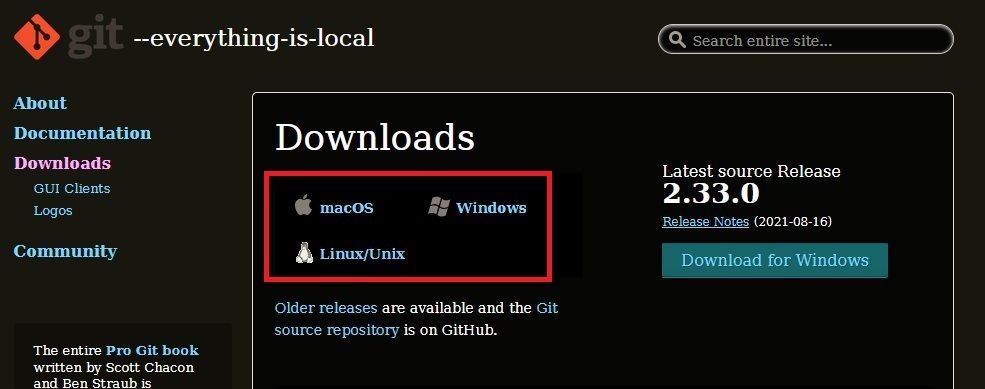



- 14 réponses
-
- 10
-

-

-
 Salut à tous, Motivé ce matin, je me suis enfin décidé à monter mon capteur de fin de filament sur mon Ender 3 Pro équipée d'un BLTouch. La partie mécanique + branchements s'est bien déroulée, mais j'ai - naïvement - cru qu'en mettant à jour le firmware par l'intermédiare des fichiers adéquats depuis le site de Creality : Lien site Creality - Support dédié à l'ender 3 Pro allait me permettre de solutionner rapidement l'affaire. Eh ben non, les firmware de Creality sont ... pourris et encore je suis poli. Impossible de paramétrer le BLTouch correctement et de mettre à jour l'offset, à chaque fois, l'imprimante m'affiche l'erreur "Err: Too Far". C'est vraiment étrange parce que le BLTouch fonctionnait très bien jusqu'à présent. J'ai revérifié les câblages et tout semble correct, n'a pas bougé. J'ai alors tenté en suivant le tuto très bien détaillé suivant : Lien tuto création de firmware Marlin pour Ender 3 Pro avec BLTouch et avec Filament sur CM 4.2.7 de compiler mon propre firmware à partir du dépôt officiel Marlin : Dépôt Marlin officiel mais j'obtiens eu une erreur à la fin de la compilation qui ne me permet pas de sauver le *.bin (- je n'ai pas fait de screenshot - et là, j'avoue j'en ai marre, j'y aurai passé ma journée !). J'ai enfin en désespoir de cause, tenté de placer le dernier firmware trouvé sur un autre site de creality : Creality Cloud - Ender 3 pro 4.2.7 Mais guère plus de résultat pas de possibilité de faire un offset. (J'ai mis en pièces-jointes les deux fichiers zip de Marlin et de l'Ender 3 pro v4.2.7 que j'ai utilisé avec VisualStudio si jamais ça en intéressait de jeter un oeil). Donc, je suis un peu dans la mouise, impossible de faire un calibrage correct du BLTouch. Si d'aventure quelqu'un avait une configuration identique et accepterait de me dépanner de son image de firmware *.bin, j'en serai ravi ! Marlin-2.1.2.1.zip CrealityV427.zip
Salut à tous, Motivé ce matin, je me suis enfin décidé à monter mon capteur de fin de filament sur mon Ender 3 Pro équipée d'un BLTouch. La partie mécanique + branchements s'est bien déroulée, mais j'ai - naïvement - cru qu'en mettant à jour le firmware par l'intermédiare des fichiers adéquats depuis le site de Creality : Lien site Creality - Support dédié à l'ender 3 Pro allait me permettre de solutionner rapidement l'affaire. Eh ben non, les firmware de Creality sont ... pourris et encore je suis poli. Impossible de paramétrer le BLTouch correctement et de mettre à jour l'offset, à chaque fois, l'imprimante m'affiche l'erreur "Err: Too Far". C'est vraiment étrange parce que le BLTouch fonctionnait très bien jusqu'à présent. J'ai revérifié les câblages et tout semble correct, n'a pas bougé. J'ai alors tenté en suivant le tuto très bien détaillé suivant : Lien tuto création de firmware Marlin pour Ender 3 Pro avec BLTouch et avec Filament sur CM 4.2.7 de compiler mon propre firmware à partir du dépôt officiel Marlin : Dépôt Marlin officiel mais j'obtiens eu une erreur à la fin de la compilation qui ne me permet pas de sauver le *.bin (- je n'ai pas fait de screenshot - et là, j'avoue j'en ai marre, j'y aurai passé ma journée !). J'ai enfin en désespoir de cause, tenté de placer le dernier firmware trouvé sur un autre site de creality : Creality Cloud - Ender 3 pro 4.2.7 Mais guère plus de résultat pas de possibilité de faire un offset. (J'ai mis en pièces-jointes les deux fichiers zip de Marlin et de l'Ender 3 pro v4.2.7 que j'ai utilisé avec VisualStudio si jamais ça en intéressait de jeter un oeil). Donc, je suis un peu dans la mouise, impossible de faire un calibrage correct du BLTouch. Si d'aventure quelqu'un avait une configuration identique et accepterait de me dépanner de son image de firmware *.bin, j'en serai ravi ! Marlin-2.1.2.1.zip CrealityV427.zip -
Sur la dropbox officielle de la U20 le dernier Firmware est le 2.14 Sur la dropbox (officielle ?) de la U30 le dernier Firmware est le 2.15 Pensez vous qu'ils soient compatible ? Même si le update log est "light" et n'apportera pas grand chose, c'est juste pour savoir si le suivi sera le même
-
Changer de firmware (de Marlin à Klipper)
fran6p a posté un sujet dans Tutoriels et améliorations pour Creality
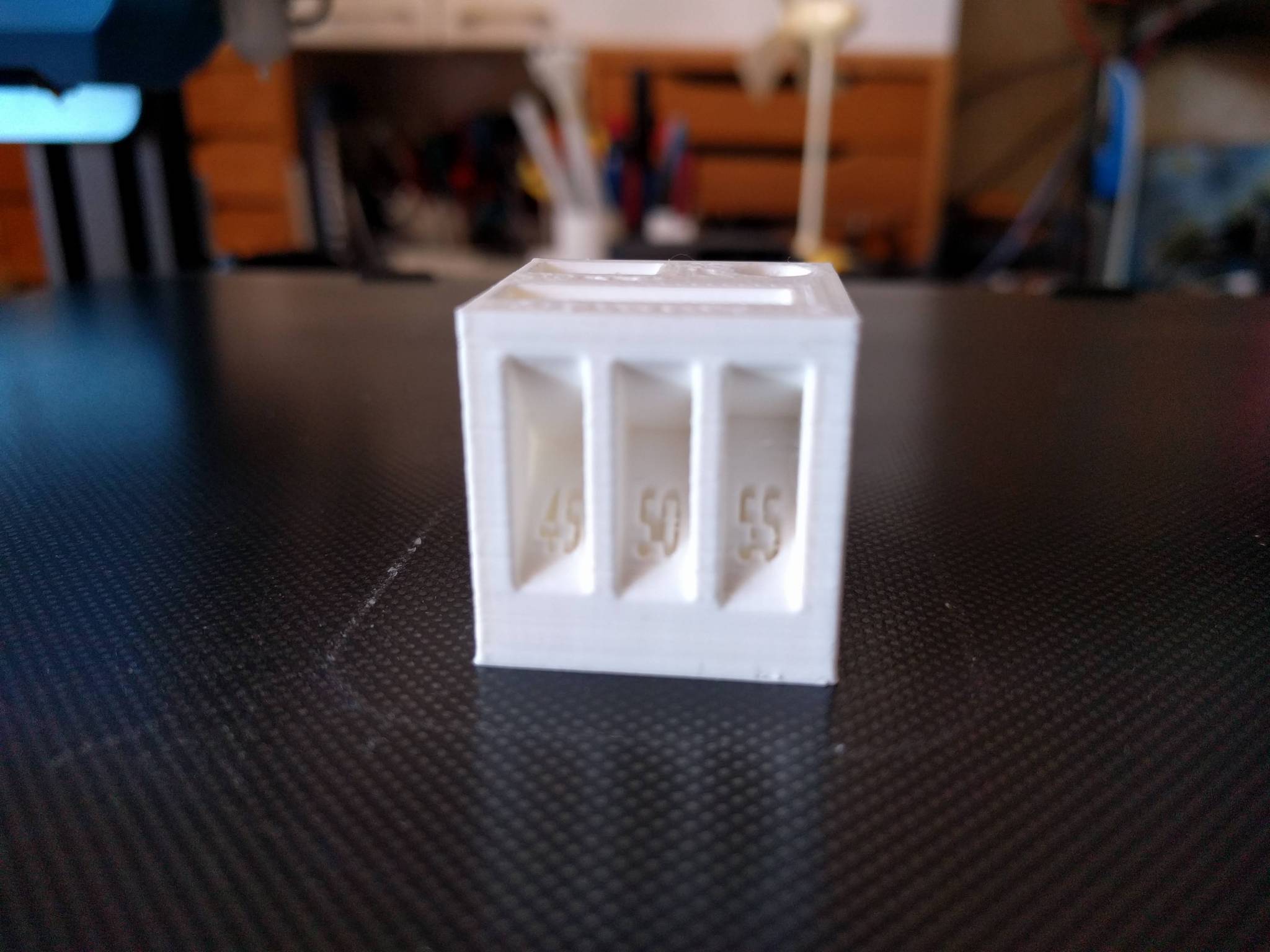
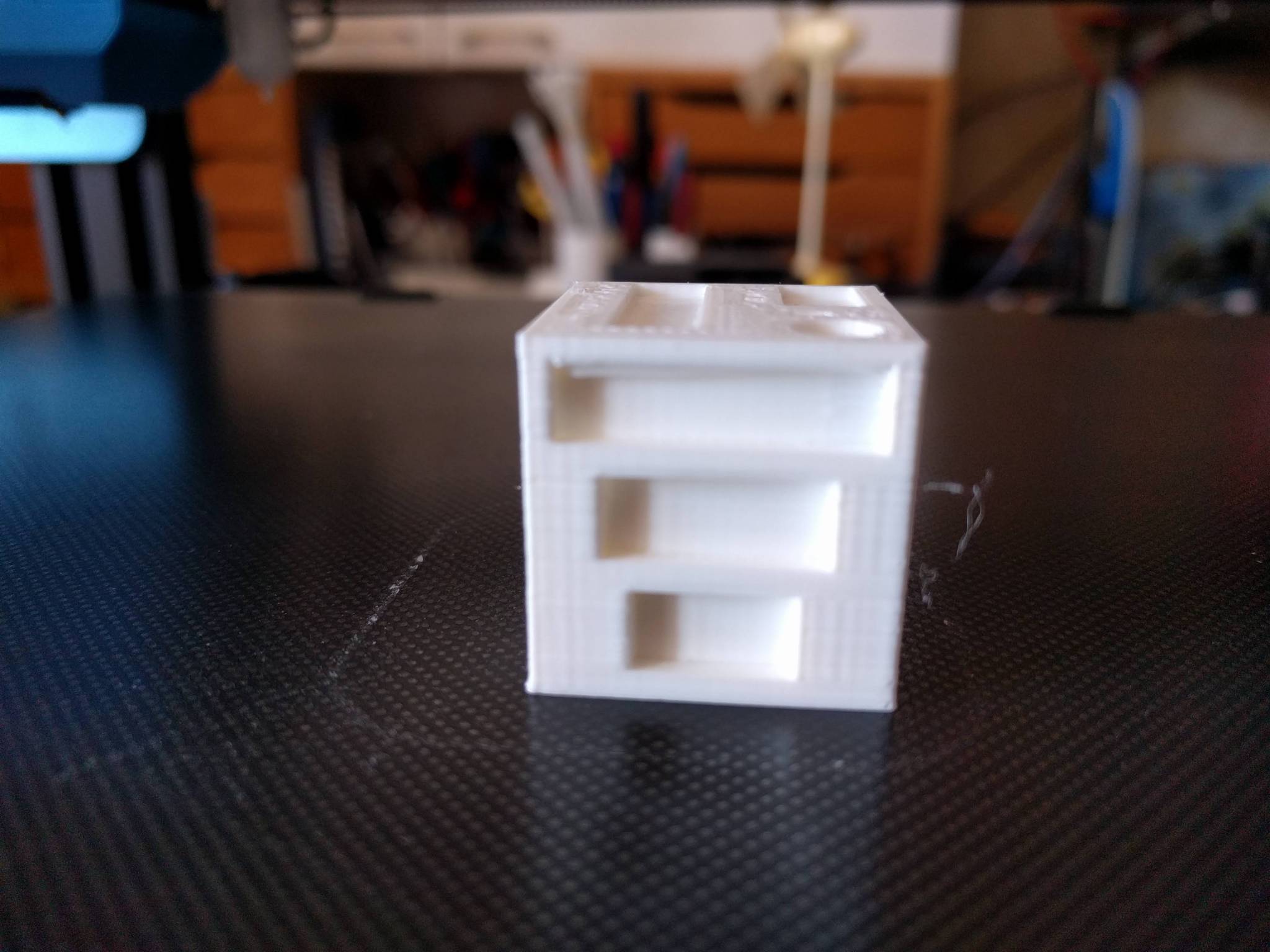
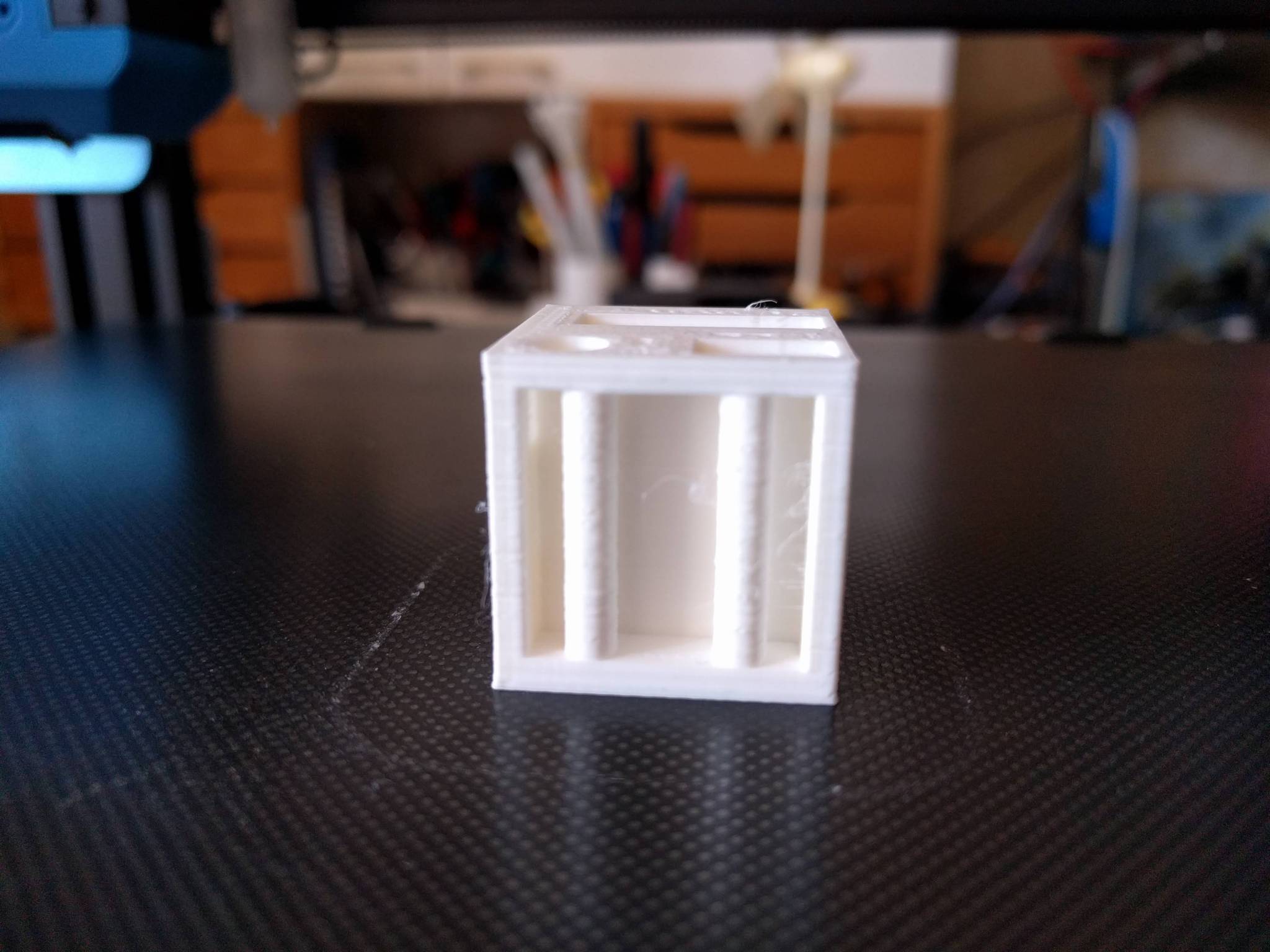
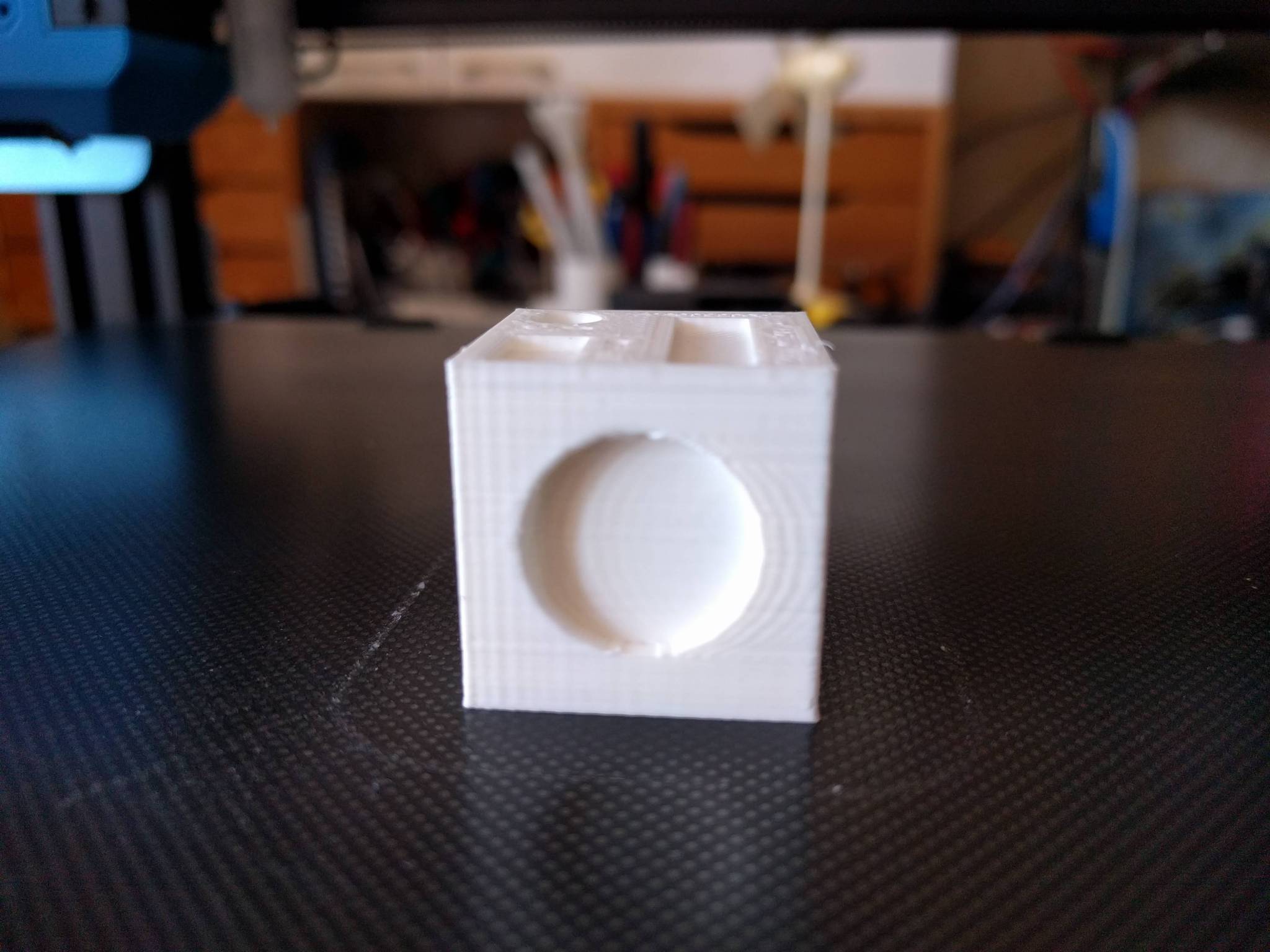
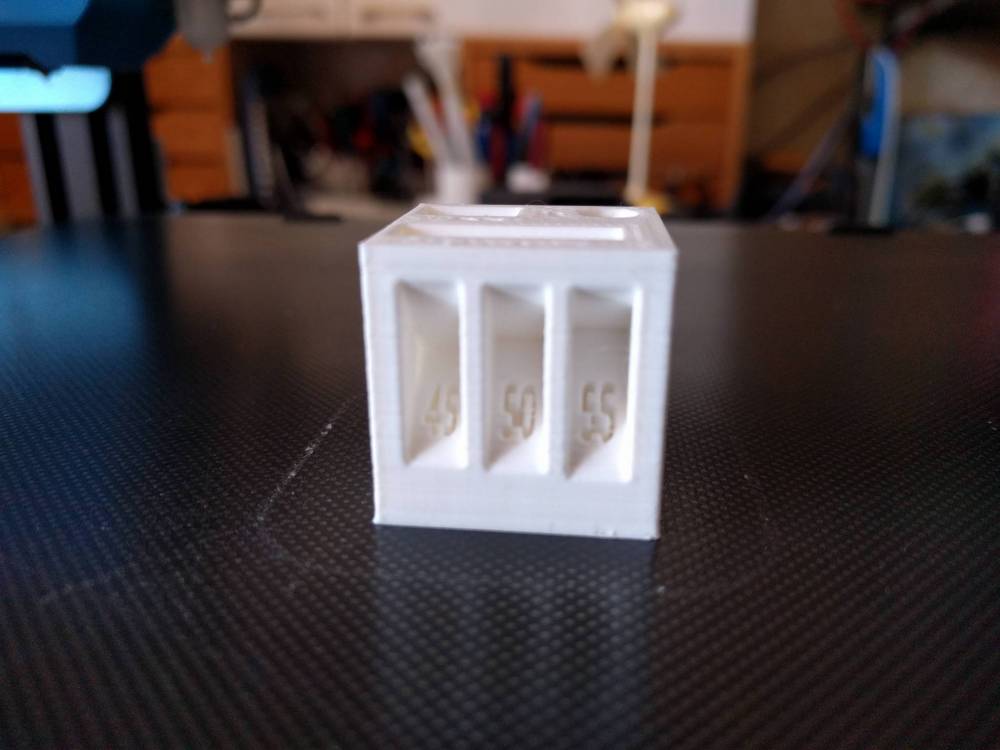
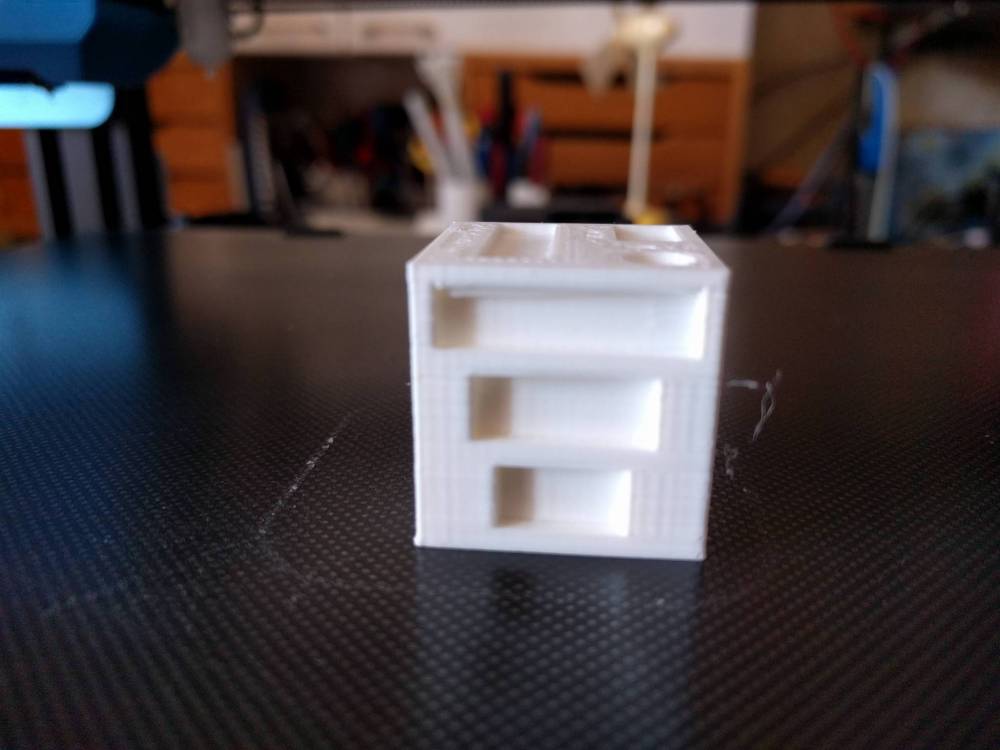
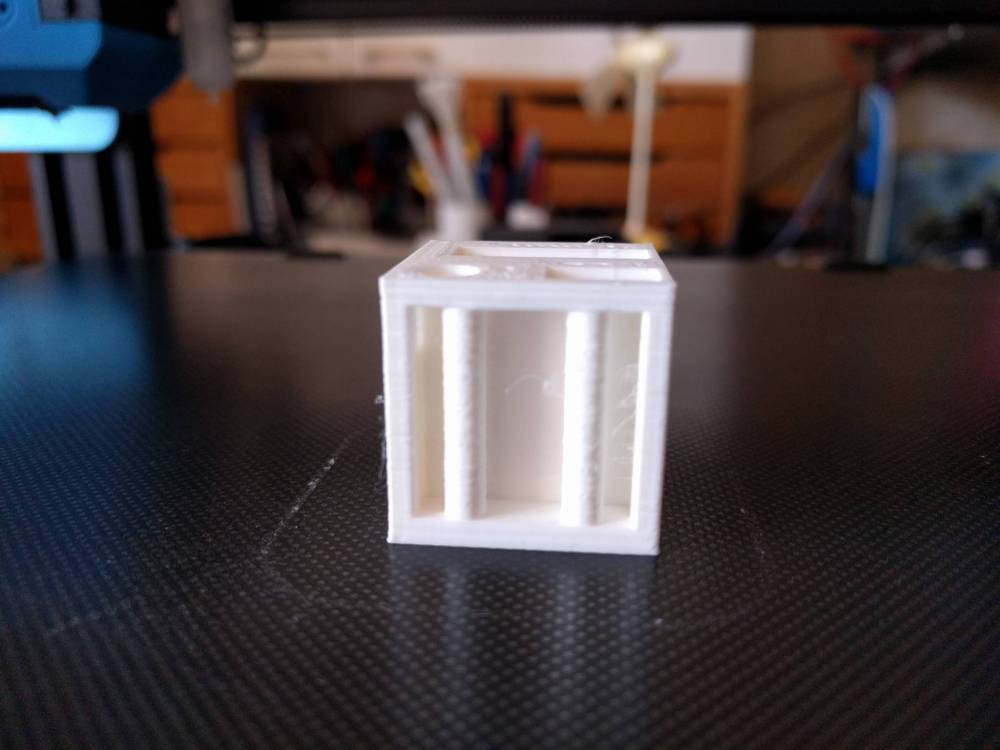
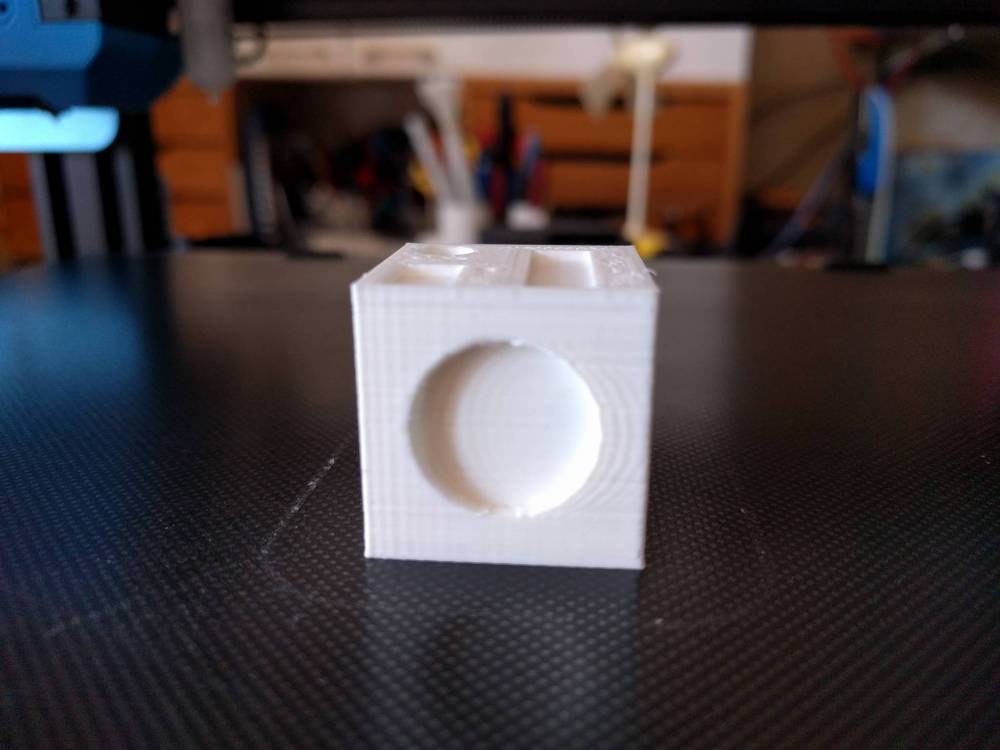
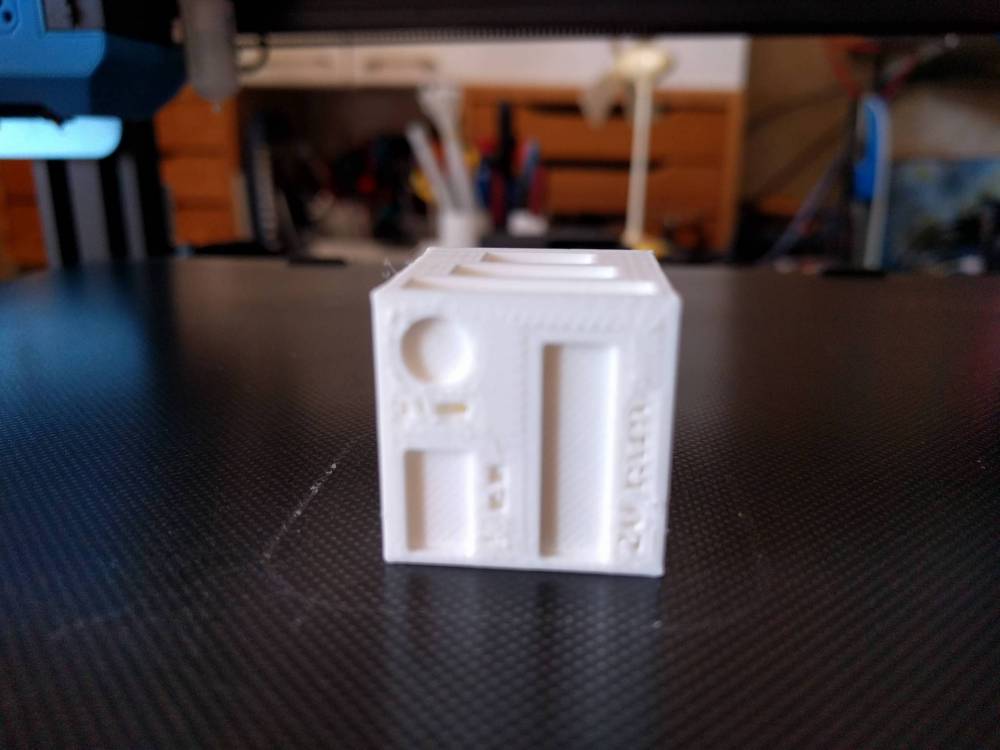
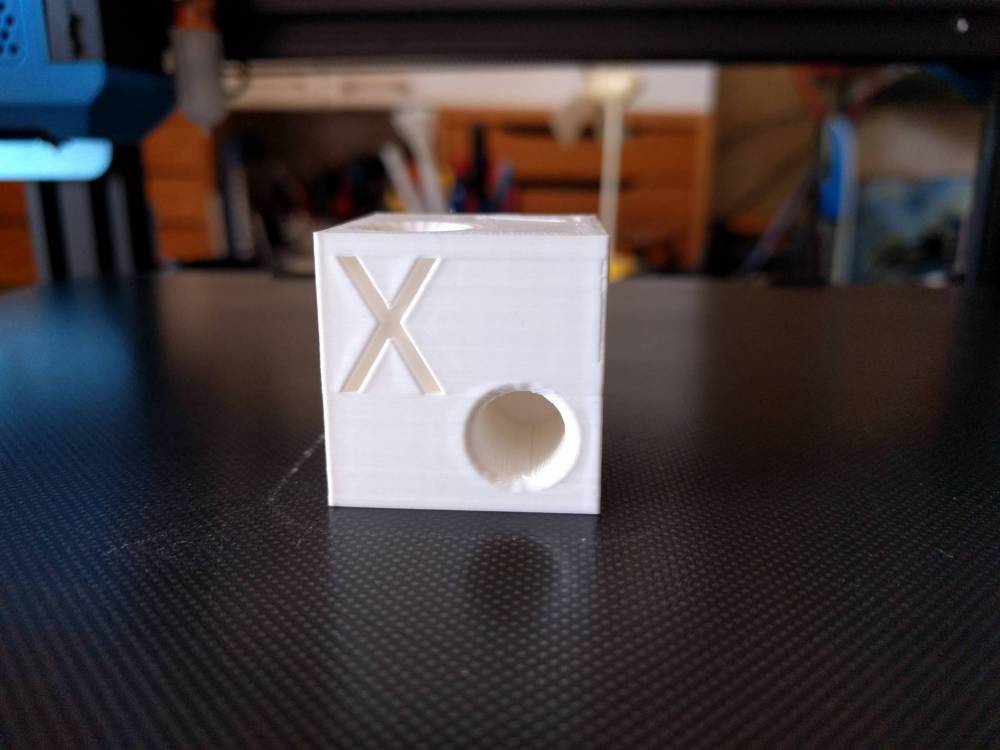
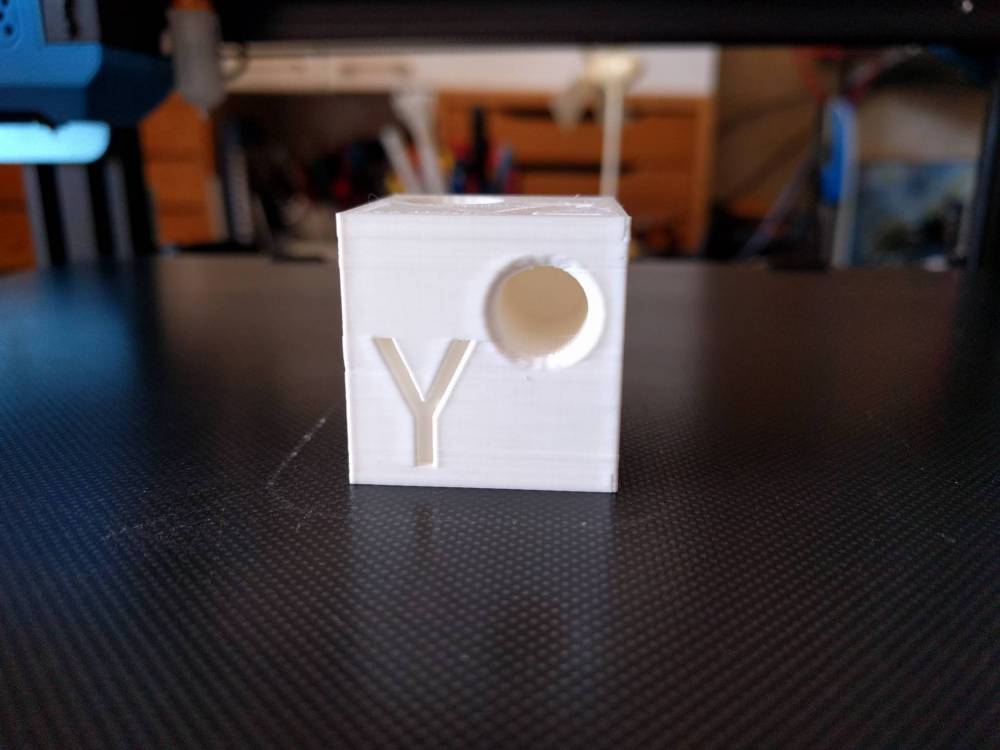
Ayant rencontré quelques difficultés d’impression avec des pièces cylindriques sur ma CR10V2 récemment mise à jour avec un bon et beau Marlin 2.0.5.3 dont j’avais fait part dans ce post : La remarque de @Tircown quant au firmware Klipper m’a «provoqué». Aimant les défis, particulièrement quand ils sont liés à l’informatique, l’électronique et la bidouille en général, j’ai sauté le pas. Je vais donc relater mon expérience, en renvoyant vers les liens qui m’ont été utiles et en fournissant évidemment les fichiers de configuration de ma CR10-V2 (pour les pressés, aller directement à la fin du post pour y trouver ceux-ci). Étape préliminaire Étant de la vieille école, je préfère de loin une bonne documentation format écrit fusse-t’elle en anglais plutôt que des vidéos pour me plonger dans un sujet nouveau. Le créateur du firmware Klipper, justement, a bien fait les choses, de nombreuses heures de lecture sont à prévoir (en ligne ou après récupération de l’archive compressée) : https://github.com/KevinOConnor/klipper Un utilisateur du forum, @Nibb31 a réalisé un excellent tutoriel (en français évidemment) qui explique tout : Tout ce que vous avez toujours voulu savoir sur Klipper sans jamais oser le demander Un autre site dont je me suis fortement servi : https://klipper.info/ Après lecture assidue des documents des liens précédents, je peux alors me lancer, d’autant plus que j’ai tout le matériel nécessaire (imprimantes, raspberry pi, cerveau et couteau). Première étape, installation de Klipper Octoprint étant déjà installé et fonctionnel, je m’y connecte via SSH (utilisateur : pi, mdp : cestmonsecret ou raspberry si vous ne l’avez pas modifié (c’est pas bien de ne pas le faire)). On récupère Klipper : git clone https://github.com/KevinOConnor/klipper ./klipper/scripts/install-octopi.sh Ces deux lignes, télécharge Klipper (git), installe les dépendances indispensables, prépare Klipper pour qu’il démarre automatiquement à l’allumage de la framboise et démarre celui-ci sous forme d’un service (le script «install-octopi.sh»est un fichier texte contenant les lignes de commandes). On construit puis flashe le microcontrôleur : cd ~/klipper/ make menuconfig Choix du microcontrôleur de la carte : Atmega2560 pour la CR10-V2, puis on lance la «compilation» : make On vérifie sur quel port la carte est connectée en USB : ls /dev/serial/by-id/* Le résultat affiche un lien symbolique /dev/serial/by-id/usb-1a86_USB-Serial-if00-port0 vers le périphérique physique (chez moi /dev/ttyUSB0). pi@octopi:~ $ ls -l /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 lrwxrwxrwx 1 root root 13 May 18 12:56 /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 -> ../../ttyUSB0 Il ne reste plus qu’à flasher le firmware : sudo service klipper stop make flash FLASH_DEVICE=/dev/serial/by-id/usb-1a86_USB-Serial-if00-port0 sudo service klipper start Pour que ce flashage réussisse il faut que Octoprint ne soit pas connecté à l’imprimante (bouton «Déconnecter»). Seconde étape, configurer Octoprint Configurer Octoprint pour qu’il utilise Klipper : ajouter un port série nommé /tmp/printer dans les préférences, Connexion série, onglet Général, «ports série supplémentaires» puis sauvegarder. Revenir dans les préférences, dans l’onglet «comportement» modifier à la section «Que faire en cas d’erreur de firmware» en cochant «Annuler toutes impressions en cours mais rester connecté à l’imprimante», enregistrer. Reste à tester la connexion après avoir sélectionné le bon port série ( /tmp/printer) puis en cliquant sur le bouton «Connecter». En utilisant le terminal avec la commande «status», une erreur est retournée puisque la configuration de l’imprimante n’est pas faite. Pour me faciliter encore plus la vie, j’ajoute un plugin à Octoprint : Octoklipper Troisième étape, configurer Klipper Il reste à préparer un fichier de configuration correspondant à ma CR10V2. Dans les fichiers du répertoire «config» de Klipper, celle-ci n’est pas présente. Il y en a pour la CR10 et la CR10S (printer-creality-cr10-2017.cfg et printer-creality-cr10s-2017.cfg) Dans les sources du Marlin2, les attributions des pattes d’un microcontrôleur sont regroupées dans le dossier src/pins/«controleur»/pins_«carte».h. La carte de la CR10-V2, version2.5.2 (Atmega2560), est déclarée comme une RAMPS modifiée par Creality : #define MOTHERBOARD BOARD_RAMPS_CREALITY les numéros des pins à déclarer seront donc dans pins_RAMPS_CREALITY.h (et en inclusion pins_RAMPS.h). Le fichier prévu pour une CR10S correspond aux attributions, il y aura donc moins de travail de tâtonnement et ça c’est cool. Il y a bien quelques différences mais elles sont minimes. Ayant un Bltouch d’installé, le pin utilisé est celui du Z_MAX alors que le endstop est sur le Z_MIN. Je complète ce fichier de configuration avec les options dont j’ai besoin, place ce fichier dans le home du Pi et relance Klipper soit via le terminal d’Octoprint («firmware_restart») ou via le plugin Octoklipper et le bouton «Firmware» ou «Host» Quatrième étape, vérifier la configuration La documentation relate les étapes à suivre pas-à-pas : vérifier l’affichage des températures vérifier l’«arrêt d’urgence» (M112) vérifier la mise en chauffe du lit et de la tête vérifier le fonctionnement des moteurs vérifier les fins de course vérifier les pilotes des moteurs vérifier le moteur de l’extrudeur calibrer les réglages de PID (tête / lit) Dans l’ensemble peu de modifications à effectuer pour que l’ensemble fonctionne (au cas où, j’avais le doigt prêt à appuyer sur l’interrupteur de l’alimentation). Toutes les attributions de «pins» format «arduino» (déclaration pin_map dans la section [mcu] du fichier de configuration) sont correctes. Possédant un détecteur de fin de filament, j’ai juste eu à inverser sa logique de fonctionnement : au départ : switch_pin: ar2 devient : switch_pin: !ar2 Ma CR10V2 a été modifiée par l’adjonction d’un système d’auto-nivellement (BLTouch de Antclabs ®). Creality a prévu d’origine la possibilité de cet ajout, tout est pré câblé sur la carte mère, il suffit de connecter la prise femelle du câble du Bltouch (5 broches avec détrompeur) sur l’embase électronique située sous l’extrudeur. Cela évite d’ouvrir le boîtier d’alimentation pour déconnecter le contacteur de fin de course de l’axe Z branché sur le ZMIN. La pré connexion du BLTouch le branche sur le ZMAX donc la «pin» à déclarer est la n”19 en mode «pullup» : [bltouch] # CR10V2, connexion sur ZMAXPIN (19) sensor_pin: ^ar19 control_pin: ar11 pin_move_time: 0.4 x_offset: 47 y_offset: 0 # Increase Z_Offset to lower nozzle closer to bed. PLA 1.55 #z_offset: 1.55 speed: 60 Cinquième étape, améliorer la configuration L’imprimante étant à nouveau fonctionnelle, quelques impressions sont réalisées. Auparavant, il me faut modifier les gcodes de démarrage et de fin de mon trancheur (Cura dans un premier temps). En effet, Klipper n’utilise pas la totalité de ceux prévus pour un Marlin (ex : G29). Cette page donne tous les gcodes connus de Klipper. Il utilise de nouvelles directives (extended G-code) sous forme de mots clés équivalents aux gcodes (ex : STATUS, FIRMWARE_RESTART, BED_MESH_CALIBRATE, …). L’avantage de ce système est que l’on peut créer des macros relativement complexes afin de simuler leur équivalent en gcode Marlin. Par exemple pour mes gcodes de démarrage / fin, je vais utiliser les macros suivantes : [gcode_macro START_PRINT] variable_T_BED: 60 variable_T_EXTRUDER: 200 gcode: M117 Home sweet home # Use absolute coordinates G90 # Reset the G-Code Z offset (adjust Z offset if needed) SET_GCODE_OFFSET Z=0.0 # Home the printer G28 # Use the bed mesh #G29 BED_MESH_PROFILE LOAD=cr10v2 # Move the nozzle near the bed G1 X15 Y20 Z5 F6000 M117 Chauffe Marcel # Start bed heating and continue M140 S{T_BED} {% if printer.heater_bed.temperature < params.T_BED|float*0.85 %} M190 S{params.T_BED|float*0.85} # wait till 0.85 of bed temp is reached, then continue {% endif %} M140 S{T_BED} M104 S170 # Prechauffe buse M190 S{T_BED} M109 S{T_EXTRUDER} # Prime line PURGE M117 C’est parti, mon Kiki... [gcode_macro END_PRINT] gcode: M117 C’est fini # move z up G91 G1 E-2 Z+10 F3000 # absolute xy G90 G1 X5 Y295 F2000 #disable hotend and heated bed M104 S0 M140 S0 # disable steppers M84 BED_MESH_CLEAR # prime the nozzle [gcode_macro PURGE] gcode: M117 Ligne de purge G92 E0 ;Reset Extruder # move z axis G1 Z2.0 F3000 ;Move Z Axis up # move to prime position G1 X2 Y30 Z0.28 F5000.0 ;Move to start position G1 X2 Y200.0 Z0.28 F1500.0 E15 ;Draw the first line G1 X3 Y200.0 Z0.28 F5000.0 ;Move to side a little G1 X3 Y50 Z0.28 F1500.0 E30 ;Draw the second line G92 E0 ;Reset Extruder G1 Z2.0 F3000 ;Move Z Axis up # G29 => (1) home all (2) get bed mesh (3) move nozzle to corner so it doesnt ooze on the bed while heating up. [gcode_macro G29] gcode: G28 BED_MESH_CALIBRATE G0 X0 Y0 Z10 F6000 BED_MESH_PROFILE save=cr10v2 Dans Cura, mes gcodes de démarrage / fin deviennent ) : ; gcode macro Klipper (démarrage) START_PRINT T_BED={material_bed_temperature_layer_0} T_EXTRUDER={material_print_temperature_layer_0} ; gcode macro Klipper (fin) END_PRINT Avant de me lancer dans les impressions, je réalise la calibration de l’extrudeur (100 mm demandés = 100 mm fourni), méthode «matérielle only» donc PTFE déconnecté en sortie d’extrudeur. Résultats, un poil trop (trois tests de 100 mm, au lieu de 300mm, j’ai 303, donc règle de trois pour affiner mes pas qui passent de 0,00714285 (1/140 pas) à 0.00719666 (1/138.95 pas) [mon extrudeur a été remplacé par celui des CR10S Pro, BMG sans réduction]. Un premier cube de calibration (25x25x25mm) est tranché puis envoyé à Octoprint afin d’être imprimé. Les résultats dimensionnels sont très corrects (25 x 25 x 25,02 (XxYxZ). Au dessus j’ai bien 10 , 20 et 6 mm, les ponts sont bons, pas de «stringing» sur la face colonnes, un beau cercle, des «overhang» quasi parfaits. Le seul défaut est un léger «pied d’éléphant». Impression faite avec du PLA 3D870 Blanc (le stock de filament commence à s’épuiser), température de 215°, vitesse d’impression de test à 100 mm/s sauf pour les parois, interne à 75 mm/s, externe à 50 mm/s. J’en profite en continuant mes tests, j’ajoute la gestion de la rétraction dans le firmware Klipper (je reprends les valeurs utilisées par Cura) : [firmware_retraction] retract_length: 5.2 retract_speed: 25 unretract_extra_length: 0 unretract_speed: 20 et en ajoutant l’option dans Cura : Un autre cube de calibration (30x30x30) avec des cylindres internes de profondeur 20 mm sert à tester cette «nouvelle rétraction». L’examen du gcode obtenu permet de voir les nouveaux gcodes de rétraction (G10/ G11). ;Generated with Cura_SteamEngine 4.6.1 M82 ;absolute extrusion mode ; gcode macro Klipper START_PRINT T_BED=60 T_EXTRUDER=215 G92 E0 G92 E0 G10 ;LAYER_COUNT:150 ;LAYER:0 M106 S255 G0 F6000 X165.065 Y129.811 Z0.2 ;TYPE:SKIRT G11 G1 F1200 X165.708 Y129.86 E0.02145 … Sixième étape, Pressure Advance Qu’est que c'est que ça que c'est ? D’après la documentation, «Pressure advance does two useful things - it reduces ooze during non-extrude moves and it reduces blobbing during cornering. (traduction approximative : L'avance à la pression a deux effets utiles : elle réduit le suintement lors des mouvements sans extrusion et elle réduit les coups dans les virages (mon interprétation : les coins sont plus francs, moins arrondis )). C’est plus ou moins l’équivalent du «Linear advance» pour Marlin. Malheureusement, cette option, je ne peux pas l’activer dans Marlin avec ma carte Creality «silencieuse» équipée de pilotes TMC2208 déclarés en mode standalone. Si je l’active, mon extrudeur va plus ou moins rapidement arrêter de fonctionner. Depuis quelques mois (mi mars 2020), le développeur de Klipper a fourni une correction qui permet d’utiliser ce firmware avec cette option pour des TMC2208 en standalone. En suivant scrupuleusement la documentation, la tour carrée est tranchée, les directives d’impression sont données, l’impression est lancée. Une fois finie et examinée, mes valeurs de PA sont ajoutées dans la section [extruder] du fichier de configuration. Conclusion (provisoire) Klipper est un excellent firmware qui mérite d’être essayé. Une fois le flashage sur la carte mère réalisé, sa facilité de paramétrage, de tests est sans commune mesure avec Marlin : on effectue les modifications dans le fichier de configuration, après un RESTART ou un FIRMWARE_RESTART, la nouvelle configuration est prise en compte, plus besoin de modifier son (se) fichier(s) «.h» puis de recompiler et installer en flashant. La possibilité des «macros» est juste énorme, de nombreuses choses deviennent possibles. Klipper peut gérer (je n’ai pas testé) plusieurs cartes (en gros principe de maître / esclave), l’absence d’une fonctionnalité sur la carte principale n’oblige pas forcément à en changer. On ajoute une autre carte (une RAMPS par exemple) et on peut utiliser ses fonctionnalités en plus de la carte «principale». Merci @Tircown de m’avoir obligé à sortir de ma zone de confort et un grand merci @Nibb31 pour avoir créer son excellent tutoriel. A suivre… PS : pour ceux qui voudraient tenter l’aventure, comme promis en début du sujet, mes fichiers de configurations actuellement utilisés et fonctionnels sur ma CR10V2 avec sa carte d’origine V2.5.2. Fichiers à placer dans le home de Pi, là où se trouve Octoprint (/home/pi): Ma configuration est désormais accessible sur mon dépôt Github : https://github.com/fran6p/cfg_klipper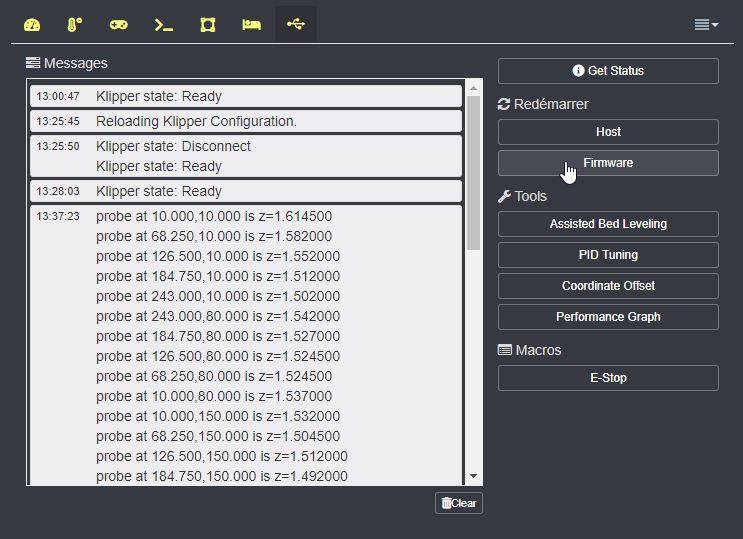



- 485 réponses
-
- 11
-
-
-

-
Bonjour à tous, Creality continue de se mettre en conformité avec la licence Open Source de Marlin. La majorité de leurs modèles sont concernés. Le seul absent pour le moment est la CR X. L'adresse pour récupérer ceux-ci se trouve là. Faites chauffer Arduino et bonnes compilations.
-
Bonjour à tous, j'ai donc récupérer une imprimante SideWinder X1, qui tourne sur marlin et TFT, et qui je pense, intègre la fonction BLtouch, donc je voudrais savoir si il est possible de désactiver cette fonctionnalité? car le 3dtouch n'est pas encore installé. Si oui, faut t'il re-uploader un firmware, ou juste le mettre à jour ? j'attend vos conseils pour ça. P.S ma buse du ventilateur qui refroidi les couches de plastique a pris son indépendance, je voulais savoir si il avait un clipse, ou si je remets simplement de la colle pour venir la refixer. Merci d'avance pour vos retours, Yoch85.
-
Bonjour ! J'ai une imprimante alfawise U20 mix, et plusieurs fonctionnalités de l'imprimante comme la modification de température de préchauffage sont inutilisables. Je suppose donc que le firmware a un problème et je voudrais le mettre à jour. Cependant, je ne trouve pas le fichier flash.wfm pour la mise à jour sur internet (pas de site Alfawise officiel), est ce que quelqu'un sait où trouver ça ? J'ai cru comprendre que d'autre imprimante Alfawise utilisent Marlin comme firmware, est ce que c'est aussi le cas de la Alfawise U20 mix ? La version du firmware de mon imprimante est 3.0.6 Merci d'avance et bonne journée !
-
Après une brève présentation j'ai décidé d'ouvrir ce sujet qui consisteras a présenter ma sidewinder X2 ou plutôt ses amélioration actuelle et future. Tout d'abord j'ai acheté l'imprimante à un moment ou j'en avais besoin de suite pour imprimer des conceptions 3d et modifier/confirmer mes modèles avec montage à blanc avant de lancer l'usinage des pièces définitive en aluminium (pièces automobile) auprès d'un usineur CNC. Je comptais pas spécialement l’améliorer, a vrai dire je comptais m'en servir uniquement pour confirmer des modèles avant éventuel usinage en métal mais aussi pour imprimer du filament souple en pièce définitive (soufflet, silentbloc ect). Mais j'ai trouvé plein d'utilité à l'impression 3d et j'ai de plus en plus envi d'avoir un outil très au point. Puis, autant pour tout ce qui est filament rigide j'en était plutôt content sans modif, autant pour le filament souple (même en 82A) c'est quand même pas trop ça, dés que la pièce a un peu des profils avec des porte a faux ect la résistance mécanique est moyenne voir nulle. Le poids de ma bobine de 3kg de TPU n'y est surement pas pour rien aussi car j'ai crus identifier un problème de sous-extrusion intermittent, selon la résistance de rotation de la bobine probablement. L'extrudeur de la sidewinder est direct drive mais c'est pas non plus la panacée pour le filament souple, bien que je pense que ca ne pose pas trop de problème avec des petite bobine. J'ai donc abandonné l'impression souple tant que je n'ai pas amélioré tout ca. Le TPU n'est pas donné, on peu foirer 3 pièces, mais pas 15... Bref je vais pas trop m’étaler sur ce premier message qui servira surtout d’inventaire des modifs et améliorations. Voici donc la liste non exhaustive des modifs faites et prévu (Verts = deja faite, Rouge = prevu) : -Renfort axe Z -Tendeurs de courroies -Pieds amortis -"Amelioration" extrudeur d'origine -Remplacement ressorts bed par patins silicone -Amelioration liaison portique/vis trapezoidale -Refroidisseur stepper driver -Plateau chauffant en alu rectifié avec aimants haute température intégré -Montage Axe Y sur rail linéaire et rigidification support de plateau -Axe X sur rail linéaire -Mise à jour du firmware vers marlin 2.1.2 : -Caisson d'impression -Hotend complet custom -BLTouch original -Upgrade firmware -Axe Z sur rail linéaire et remplacement vis trapezoidale par vis à billes -Update driver moteur Un post suivra pour chaque modif faite (vous pouvez cliquer sur le nom des modifs pour vous emmener directement sur le message concerné plutot que de chercher dans le sujet complet) Renfort axe Z : J'ai jamais vraiment eu de problème avec ça et pour cause je n'ai jamais fait de pièce réellement haute pour l'instant. Ormis une fois ou sur une pièce de 20cm de haut j'ai eu un décalage brusque sur 2 couches. Quoi qu'il en soit un renfort était dans tout les cas envisagé relativement tot après l'achat. Cependant j’étais pas vraiment attiré par tout les modèles 3d de renfort que je pouvais trouver. Je suis probablement tatillon, mais sur chaque modèle j'avais quelques chose à redire point de vue rigidité. Je ne dis pas non plus qu'ils sont pas efficace, il faut pas grand chose pour rigidifier le portique finalement. Juste pour ma tranquillité d'esprit j'ai donc fait un renfort complétement en acier avec de la cornière coupé/soudé pour lui donner le bon profil de pied, et du fer plat percé et torsadé pour la tête. Ne me demandais pas ce que ca donne en pratique car je n'ai pas eu la curiosité de faire un test d'impression de tour avant/aprés. C'est bien rigide c'est tout ce que je peu dire.


-
Bonjour J'ai reçu pour noël une dagoma disco Ultimate d'occasion modifiée avec une carte mère MKS gen L V1.0 et des driver TMC 2208 et un écran 12864. Je vous contacte car j'aimerai rajouter des fonctionnalités sur l'imprimante et donc modifier le Firmware (Marlin) fourni sur le site de Dagoma. Je voulais savoir si à part changer la carte mère et les driver dans le fichier Configuration.H il faudrait changer autre chose comme les pin par exemple? Merci d'avance Redwally
-
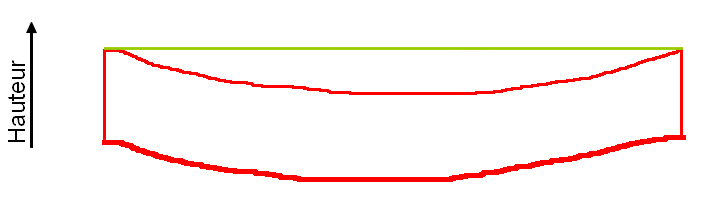
Petit tuto sans prétention pour qui veut comprendre quelques aspects de Marlin, et surtout comment trouver de la place pour ceux qui, comme moi, ont une carte mère limitée. Les plus assidus du forum n'y apprendront rien ou presque, pour le reste, j'espère que ce post pourra être utile. Je suppose dans ces lignes que le lecteur sait déjà comment flasher sa machine avec le logiciel Arduino, et modifier les fichiers configuration.h et configuration_adv.h Je vais essayer de suivre l'ordre des fichiers de configuration, pour ne pas avoir à chercher trop longtemps les lignes correspondantes, mais il faut savoir que je ne détaillerai pas tout : Bien des lignes doivent rester telles quelles si l'on veut garder une imprimante fonctionnelle. Pour info, je me base sur une version de Marlin 1.1.9. Fausses idées toutes faites Tout d'abord, je souhaitais tuer dans l’œuf les fausses croyances que j'ai déjà pu lire ici et ailleurs : Il est inutile de supprimer les commentaires, cela ne vous fera que perdre votre temps Les fonctions commentées (celles commençant par '//'), ne sont pas incluses à la compilation, il est tout aussi inutile des les supprimer Fichiers de langues inutilisées : Dans language_fr.h par exemple, on voit que des tas de lignes concernant le détecteur de fin de filament, l'utilisation de l'UBL (Unified Bed Leveling), etc qui ne sont pas commentées. Même si vous n'utilisez pas ces fonctions, il est inutile de supprimer ou commenter ces variables de langue, elles ne seront pas incluses dans la compilation de Marlin. Lors de la compilation, Arduino va aller chercher et compiler uniquement les informations qui sont nécessaires, aucun superflu ne sera mis en mémoire. Dans la même lignée, rien ne sert de supprimer les lignes vides. Pour la bonne compréhension : - Chaque ligne qui commence par '//' est un commentaire ou une fonction commentée. Cela veut dire qu'Arduino ne lira pas cette ligne, et passera à la suite. - Chaque ligne qui commence par '#' est une instruction. Seules ces lignes seront lues, interprétées et compilées pour votre imprimante. Configuration.h Je ne détaillerai ici que le fichier configuration.h. J'espère avoir le temps dans les jours à venir de faire la même chose pour le fichier configuration_adv.h. Jacky Tuning On commence avec du superflu, l'écran de démarrage : Ligne 80 du fichier : #define STRING_CONFIG_H_AUTHOR "Schyzo, Anet E12 BLTouch" // Who made the changes. #define SHOW_BOOTSCREEN #define STRING_SPLASH_LINE1 "V1.1.9 for Anet E12" // will be shown during bootup in line 1 #define STRING_SPLASH_LINE2 "Adapted For Schyzo" // will be shown during bootup in line 2 Ces 4 lignes ne font qu'afficher l'écran de démarrage ( Boot Screen). L'imprimante n'a pas besoin de ça, et moi non plus. Sans cet écran, l'imprimante sera lancée environ 5 secondes plus rapidement. Commentez-donc ces 4 lignes (en ajoutant '//' devant chaque ligne) si vous voulez gagner plus de 1000 octets (1282 chez moi). Toujours dans le look, ligne 97 : #define SHOW_CUSTOM_BOOTSCREEN Ceci ne sert qu'à afficher une image personnalisée définie dans le fichier Marlin/_Bootscreen.h au démarrage. Certains fournissent une image comme TH3D qui ne fait qu'alourdir le firmware. Vous pouvez commenter Puis, à la ligne 100 : #define CUSTOM_STATUS_SCREEN_IMAGE Même combat, une image personnalisée sur l'écran d'accueil, définie dans le fichier Marlin/_Statusscreen.h comme ici : Vous pouvez commenter cette ligne pour gagner de précieux octets (voir plus). PID Le PID (Proportional Integral Derivative) est un procédé de Marlin et autres firmwares qui permet une montée en température optimisée des éléments chauffants (buse et lit). Lorsque le PID de ces éléments n'est pas activé, la montée en température est définie en 'bang-bang', comprendre en gros en binaire : "Si c'est trop froid, j'envoie du courant à fond, si c'est à bonne température, je coupe". Aussi la température ne fait que monter et descendre, ce qui peut poser une dégradation de l'impression notamment avec la température de la buse. A titre d'exemple, j'ai trouvé cette image sur le forum reprap.org : Page en question : https://reprap.org/forum/read.php?262,782815 Exemple de courbe de température en bang-bang : Avec utilisation du PID : Bref, si j'en parle ici c'est que l'utilisation du PID pèse quand même quelques kilos dans la bataille du gain de mémoire. Pour ma part, j'ai activé le PID de la buse et du lit, quitte à supprimer d'autres fonctions. PID de la buse : Pour l'activer, il faut se rendre à la ligne 362 : #define PIDTEMP Puis environ 20 lignes plus bas, il faut définir les valeurs Kp, Ki et Kd : #define DEFAULT_Kp 28.94 #define DEFAULT_Ki 2.37 #define DEFAULT_Kd 88.30 Si ces lignes sont commentées, décommentez-les. Ces valeurs que je n'expliquerai pas faute de compétence (et ce n'est pas le sujet), sont MES PROPRES valeurs. C'est elles qui définiront la montée en température de votre élément chauffant. A chaque changement de buse ou matériel chauffant (cartouche chauffante par exemple), il faut redéfinir ces valeurs. Pour cela, je vous renvoie vers un tuto du forum qui explique pas à pas la marche à suivre pour récupérer ces 3 paramètres selon votre machine : A noter que l'utilisation du PID pour la hotend requiert environ 3300 octets. PID autotune : Marlin propose d'ajouter un menu dans l'imprimante afin de lancer un autotune, c'est à dire que vous pourrez lancer directement depuis l'écran de l'imprimante un autotune qui calculera et enregistera les meilleurs valeurs pour votre imprimante. Cette fonction lancera une montée en température de la buse (température que vous définirez via l'écran de l'imprimante directement), jugera et enregistrera dans l'EEPROM des meilleurs valeurs obtenues. Pour cela, décommentez la ligne 367 : #define PID_AUTOTUNE_MENU Lors de l'autotune, sélectionnez une température que vous employez le plus. Par exemple si vous n'imprimez que du PLA et PETG, prenez une moyenne haute à 230° par exemple. Le PID autotune occupera 600 octets environ de plus. PID du bed : Pour le lit, l'utilisation du PID reste identique, à savoir une température constante. En mode BED_LIMIT_SWITCHING en revanche, on retrouve la chauffe binaire : On chauffe à fond ou rien du tout. Si vous souhaitez activer l'utilisation du PID pour le lit chauffant, décommentez la ligne 407 : #define PIDTEMPBED Et n'oubliez pas de commenter la ligne 409 afin de libérer un peu de place : //#define BED_LIMIT_SWITCHING Puis comme pour la buse, définissez les valeurs de Kp, Ki et Kd ligne 424 : #define DEFAULT_bedKp 255.01 #define DEFAULT_bedKi 17.39 #define DEFAULT_bedKd 934.85 L'utilisation du PID pour le lit chauffant occupera environ 1400 octets de plus que le mode BED_LIMIT_SWITCHING. A noter qu'il ne sera pas possible, même en ayant activé l'autotune, de lancer un test autotune pour le bed depuis l'écran LCD (vous ne devrez pas avoir à le changer régulièrement, je l'espère pour vous ). Là encore, je vous renvoie vers le tuto de neoraptor pour récupérer les valeurs Kp, Ki et Kd pour votre lit : Protection contre vous-même : Si jamais vous avez confiance en vous, sachez qu'il est possible de désactiver la protection d'extrusion à froid, ligne 445 : #define PREVENT_COLD_EXTRUSION // Permet de ne pas faire tourner l'extrudeur si la température de la buse n'est pas d'au moins 170° (EXTRUDE_MINTEMP) et la protection d'une trop grande extrusion manuelle, ligne 452 : #define PREVENT_LENGTHY_EXTRUDE // Protection pour ne pas extruder plus de 200mm (EXTRUDE_MAXLENGTH) en dehors d'une impression Ces 2 fonctions commentées vous feront gagner presque 1000 octets, à vous de jauger votre confiance en vous Je ne détaillerai pas la désactivation des protections thermiques du bed et de la hotend, qui sont à mes yeux essentielles et donc non négociables. Bed leveling Si certains ont déjà du mener la bataille des octets avec Arduino, ceux-ci savent combien l'utilisation d'un palpeur est lourd. Pour avoir fait quelques tests pour ce tuto, j'estime à 18ko le poids de l'utilisation d'un BLTouch par rapport à un simple endstop. Mais saviez-vous que vous pouviez tout de même espérer libérer un peu de place ? Chaque mode de leveling pèse plus ou moins lourd, et est plus ou moins complet forcément. Bi-linéaire Ligne 982 : #define AUTO_BED_LEVELING_BILINEAR Le mode certainement le plus utilisé et adapté à la plupart des plateaux. Grâce à un palpeur/sonde (BLTouch ou autre), il fait 3 palpages (points) ou plus dans chaque axe (X Y) et en détermine grossièrement ou finement selon le nombre de points déterminés les défauts du plateau, qu'il corrigera pendant l'impression. Nécessite 11 ko sur la carte. 3 points Ligne 980 : #define AUTO_BED_LEVELING_3POINT Avec un palpeur, sonde 3 points déterminés et détermine le nivellage du plateau. Plus léger (6 ko), à n'utiliser que si vous êtes sûrs que votre plateau est bien plat. Linéaire Ligne 981 : #define AUTO_BED_LEVELING_LINEAR Semblable au mode bi-linéaire, corrige un défaut de lit qui ne serait pas correctement incliné. Ce mode ne corrige pas les défauts d'un lit déformé (creux au centre par exemple). Nécessite 11 ko sur la carte, je cherche l'intérêt de ce mode. Unified Bed Leveling (UBL) Ligne 983 : #define AUTO_BED_LEVELING_UBL Ce mode est trop gros pour ma carte, aussi je n'ai pas pu le tester. Quoi qu'il en soit, celui-ci permet de créer une matrice très précise de votre lit et d'en enregistrer les relevés dans l'EEPROM. Puis à chaque impression, palpe 3 points pour déterminer l'inclinaison et les défauts du lit puis s'appuie sur les valeurs précédemment enregistrées pour corriger très précisément l'impression en fonction des défauts de votre lit. Pèse approximativement 48 ko. Mesh Leveling Ligne 984 : #define MESH_BED_LEVELING Un mode que j'ai découvert il n'y a pas longtemps. Celui-ci permet de corriger une déformation du lit, sans nécessiter de palpeur. Vous faites le sondage à la main (aidé par Marlin bien sûr) avec votre feuille de papier, vous jouez avec le Z depuis l'écran LCD et celui-ci corrige les défauts du lit pendant l'impression, comme si vous aviez un BLTouch. 9.7 ko nécessaires pour ce mode. Hauteur lissée (fade height) Avec certains bed leveling activés (Bi-linéaire, Mesh leveling ou UBL), vous avez la possibilité de définir une hauteur lissée, c'est à dire que pendant l'impression, Marlin va au fur et à mesure corriger la pièce pour que le défaut du lit ne soit plus visible à partir de X mm (définie via l'écran LCD ou par la commande M420 Z(hauteur). En exagérant, si votre lit est creux au centre, on peut imaginer imprimer une boite ainsi : En rouge en haut le résultat sans la hauteur lissée, en vert ce que donnera l'impression avec la hauteur lissée. Nécessite 1600 octets. Bed leveling via le LCD Ligne 1106 : #define LCD_BED_LEVELING Permet de faire le leveling si vous avez un des modes cités au dessus activé. Si vous avez activé le Mesh Leveling (manuel), Marlin vous guidera étape par étape via l'écan LCD pour faire le leveling. Requiert environ 1 ko. Déplacement de la tête automatique Ligne 1114 : #define LEVEL_BED_CORNERS Depuis l'écran LCD, permet de faire bouger la buse automatiquement pour faire le réglage aux 9 points du plateau en leveling mauel. Nécessite 1200 octets. Fonctions additionnelles Préchauffage J'ai lu encore récemment qu'on pouvait gagner de la place en commentant les fonctions de préchauffage de PLA et ABS. Bien que je les trouve utile, voilà comment gagner 40 octets. Oui, pas un de plus, 40... Commentez les lignes 1262 à 1268 : #define PREHEAT_1_TEMP_HOTEND 210 #define PREHEAT_1_TEMP_BED 60 #define PREHEAT_1_FAN_SPEED 0 // Value from 0 to 255 #define PREHEAT_2_TEMP_HOTEND 235 #define PREHEAT_2_TEMP_BED 80 #define PREHEAT_2_FAN_SPEED 0 // Value from 0 to 255 Il vous faudra également commenter ces lignes dans le fichier configuration_store.cpp, à la ligne 1820 : #if ENABLED(ULTIPANEL) lcd_preheat_hotend_temp[0] = PREHEAT_1_TEMP_HOTEND; lcd_preheat_hotend_temp[1] = PREHEAT_2_TEMP_HOTEND; lcd_preheat_bed_temp[0] = PREHEAT_1_TEMP_BED; lcd_preheat_bed_temp[1] = PREHEAT_2_TEMP_BED; lcd_preheat_fan_speed[0] = PREHEAT_1_FAN_SPEED; lcd_preheat_fan_speed[1] = PREHEAT_2_FAN_SPEED; #endif Notez que mes valeurs ne sont plus celles par défaut. Plutôt que de les virer, j'ai renommé 'ABS' en 'PETG' dans les fichiers de langue, bien plus utile que de tout supprimer pour gagner une misère. Je ne recommande absolument pas de toucher aux fichiers cpp, à vos risques et périls. Modifier les valeurs de l'EEPROM Ligne 1230 : #define EEPROM_SETTINGS Permet depuis votre PC relié à l'imprimante ou l'écran LCD de modifier la vitesse max, accélérations, jerk, steps/mm, offset Z etc etc Si vous êtes certains de ne plus toucher à ces réglages ou de flasher à chaque fois votre imprimante pour les modifier, vous pouvez commenter cette ligne afin de libérer 5.7 ko Récupérer les valeurs de l'EEPROM Ligne 1231 : #define DISABLE_M503 Pour gagner 2800 octets, il faut ACTIVER (ne pas commenter) cette ligne. Permet depuis un terminal de récupérer les paramètres de l'EEPROM (accélération, vitesses, steps/mm, ...). Nettoyage de la buse Il existe une fonction permettant avant chaque print de nettoyer la buse en l'envoyant à un point spécifique de votre plateau (ou légèrement en dehors). Voilà par exemple la réalisation de notre ami @Jean-Claude Garnier qui envoie sa buse se faire polisher sur une brosse à dent : Pour l'activer, ligne 1328 : #define NOZZLE_CLEAN_FEATURE Nécessite 1.7 ko Carte SD Pour ceux qui n'impriment que via PC ou Raspberry, sachez qu'il est possible de désactiver le support de la carte SD. Commentez la ligne 1433 : //#define SDSUPPORT Cela vous libérera presque 17 ko dans la carte de l'imprimante, mais impossible d'utiliser la carte SD.. Pour les extrêmes Encore une fois, si vous n'imprimez que depuis le port USB de votre imprimante, il se peut que vous n'ayez même pas besoin de l'écran. Par exemple, en désactivant l'écran LCD de mon Anet, ligne 1757 : //#define ANET_FULL_GRAPHICS_LCD Cela me fait économiser 39 ko de mémoire que je peux réutiliser ailleurs. Mais je n'ai plus d'écran, tout se fait depuis le PC ou le Raspberry. Voilà pour le fichier de configuration.h, j'essayerai de faire configuration_adv.h dans les jours à venir. N'hésitez pas d'y aller de vos retours si des passages sont à améliorer, réctifier ou clarifier.
- 14 réponses
-
- 16
-
-
-
- configuration
- marlin
- (et 1 en plus)
-
Bonjour il y a quelques mois, j'ai installé sur ma Ender 3 v2 le Sprite Extruder Pro de chez Creality ainsi qu'un CR-Touch, le tout avec le firmware professionnel de mriscoc. Le nivellement automatique ne me paraissait pas fonctionner, mais toutefois faute de temps je ne me suis pas trop penché sur la question. Maintenant que j'ai le temps j'ai installé la dernière version de son firmware (une version spéciale pour les Sprite Extruder) et réalisé tout les calibrages figurants dans son wiki. Mais, bien que le nivellement du plateau ne soit pas optimal, le nivellement ne semble pas être pris en compte : je n'observe aucun mouvement Z lors de la première couche et ma première couche n'est pas autant écrasée sur toute la surface. Voici mon gcode début dans Prusa Slicer (copié du wiki du développeur) : ; ; First layer print x min = [first_layer_print_min_0] ; First layer print y min = [first_layer_print_min_1] ; First layer print x max = [first_layer_print_max_0] ; First layer print y max = [first_layer_print_max_1] ; Total layer count = [total_layer_count] ; M201 X500.00 Y500.00 Z100.00 E5000.00 ;Setup machine max acceleration M203 X500.00 Y500.00 Z20.00 E50.00 ;Setup machine max feedrate M204 P500.00 R1000.00 T500.00 ;Setup Print/Retract/Travel acceleration M205 X8.00 Y8.00 Z0.40 E5.00 ;Setup Jerk M220 S100 ;Reset Feedrate M221 S100 ;Reset Flowrate G90 ; use absolute coordinates M83 ; extruder relative mode M104 S[first_layer_temperature] ; set extruder temp M140 S[first_layer_bed_temperature] ; set bed temp M190 S[first_layer_bed_temperature] ; wait for bed temp M109 S[first_layer_temperature] ; wait for extruder temp G28 ; home all M420 S1 Z2; Use a mesh leveling up to 2mm (a valid mesh must be loaded into RAM); G1 Z2 F240 G1 X2 Y10 F3000 G1 Z0.28 F240 G92 E0 G1 Y190 E15 F1500 ; intro line G1 X2.3 F5000 G92 E0 G1 Y10 E15 F1200 ; intro line G92 E0 Quelqu'un pourrait-il m'aider à trouver l'origine du problème et à le corriger ? Merci d'avance LVC
-
Bonjour je viens de découvrir ce firmware : https://github.com/Jyers/Marlin/tree/Ender_3_V2_Extensible_UI .. annoncer comme étant LE meilleur firmware pour la ender 3 v2 .. je n'ai pas encore tester personnellement ce firmware .. (je suis en déplacement) .. mais j'aimerais avoir vos avis .. qui l'a déjà tester ? .. est ce que c'est vraiment intéressant ? .. avantages / inconvénients ?
-
Bonjour, Sur ma Ender 3V1, j'ai une carte 1.1.5 qui a fonctionné parfaitement depuis très longtemps. Dernièrement, j'ai eu des problèmes d'extrusion de plus en plus fréquents jusqu'à ne plus extruder du tout, et après bien des investigations, il s'avère que c'est le driver TMC2208 qui est mort. J'ai changé la carte pour une 4.4.7 qui fonctionne mais qui présente des défauts qui ne me vont pas du tout : - Pas de mémorisation des paramètres, ce qui m'oblige à les entrer à chaque nouvelle impression - Gestion de l'affichage sans scroll horizontal empêchant l'affichage des noms de fichiers longs (j'ai tous mes numéros de versions de fichiers dans le nom, et ça peut être long !) - Blocage des moteurs à la mise sous tension pendant un court instant (pas bon pour les moteurs ni pour les drivers) - et bien d'autres petits problèmes d'ergonomie surmontables mais agaçants Sur la carte 1.1.5, j'avais une version Marlin bugfix 1.1.x qui me convenait parfaitement, sur la nouvelle carte 4.2.7 il y a une version Marlin 1.0.1. J'ai essayé d'autres cartes : - Creality 4.2.2 Marlin 1.0.1 - Creality 4.2.7 Marlin 1.0.1 - Cheetah V1.1b Marlin bugfix 2.0.x - Creality 4.2.7 Marlin 0.0.6 Aucune ne mémorise ni affiche correctement mes données. Je sais qu'on peut compiler sa version en utilisant une carte arduino et le système de développement ad hoc, on peut trouver les morceaux de logiciels un peu partout notamment chez Marlin, Github, Creality etc... mais ça reste très aléatoire et très ch...t, surtout pour moi ! L'idée finale étant je crois de mettre un fichier .bin sur une carte SD et de booter la machine dessus pour implanter la nouvelle version. D'où ma QUESTION : Peut-on trouver directement des fichiers .bin avec une config me convenant pour flasher ma carte et enfin qu'on n'en parle plus ? Merci de vos réponses et désolé d'avoir été si long pour ma première intervention.
-

firmware Sauvegarder et restaurer son firmware avec avrdudess
fg-35 a posté un sujet dans Discussions sur les imprimantes 3D
Bonjour à tous Pour tous ceux qui se posent la question de sauvegarder l'état de leur firmware avant de faire de le modifier ou de changer de version, j'ai trouvé sur le net un outil bien pratique. Il s'agit d'une interface graphique d'utilisation de l'utilitaire "avrdude" de Atmel (celui qui est utilisé, notamment, par Arduino IDE pour téléverser le firmware sur la carte mère de votre imprimante préférée, dès lors qu'elle est à base de microcontroleur Atmel (comme l'ATmega 2560, par exemple). Cet outil est développé et entretenu par Zak Kemble (cf. http://blog.zakkemble.net/avrdudess-a-gui-for-avrdude/). Il facilite l'utilisation de avrdude tant pour réaliser une sauvegarde binaire du contenu de la mémoire flash (le firmware) et de celui de l'EEPROM (les paramètres utilisés par le firmware) que pour restaurer ces binaires sur la carte mère. En pièce jointe la dernière version pour Windows sous forme d'une archive Zip. J'y ai d'ailleurs ajouté un profil particulier pour la TEVO Tornado. Il suffit d'extraire les fichiers de l'archive et de lancer le programme "avrdudess.exe" avrdudess_20180920-2.zip -
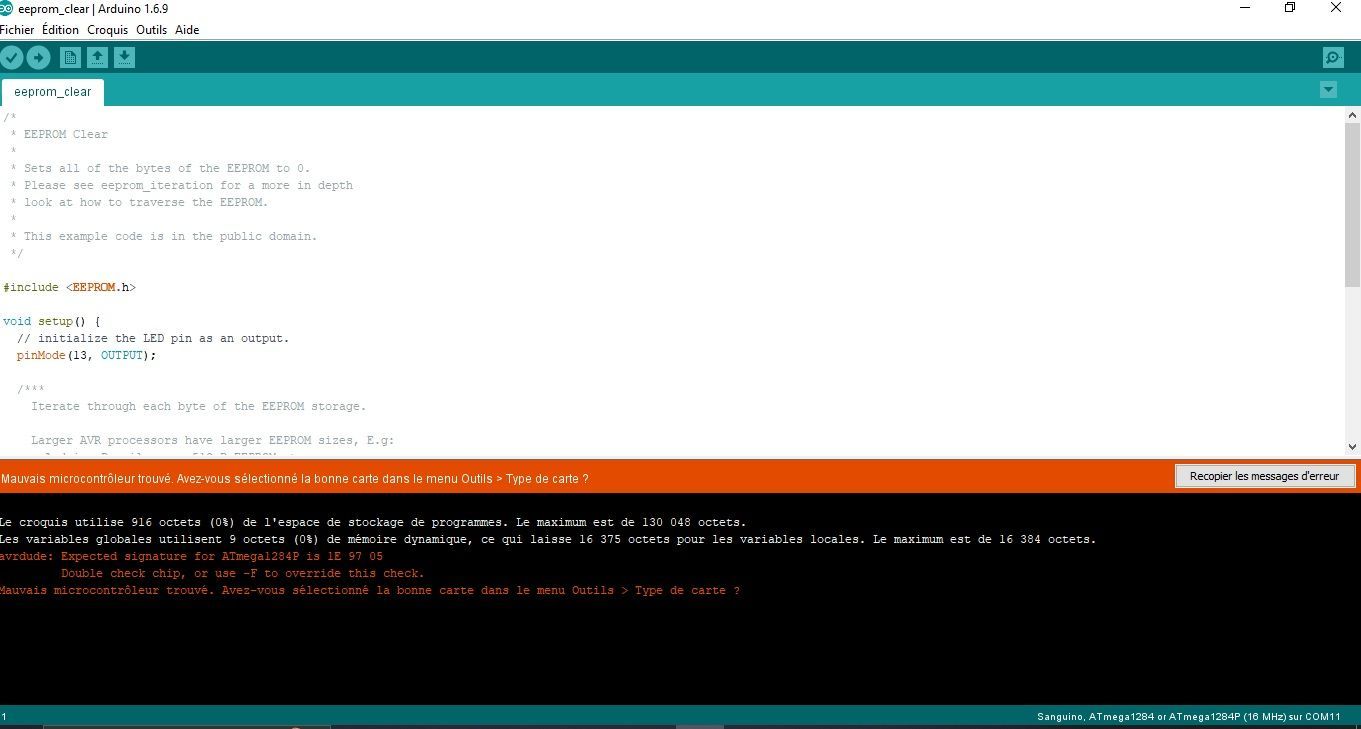
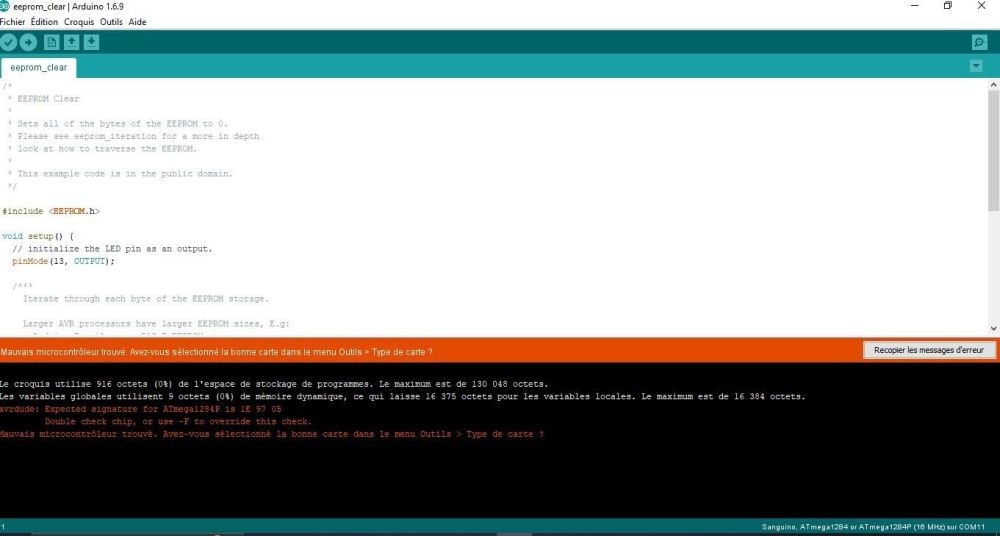
Merci pour votre aide. J'ai voulu flasher la carte de ma Creality cr10, et je suis resté bloqué au moment de flasher le bootloader, j'ai une indication qui me dit que je n'ai pas sélectionné la bonne carte. J'avais mis sanguino. Est ce que vous avez un idée. La carte est une Creality 3D V1.1.2 (12volts)
-

Problème firmware sur ANET ET4+
Senso98 a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour, j'ai récemment récuperer une imprimante Anet ET4+ et j'ai voulu reinstaller le firmware de base et je me suis trompé, j'ai flashé un firmware d'ET4 normale ! Avez vous une solution pour que je puisse remettre le firmware de la ET4+ avec capteur de nivellement ? Car maintenant uand je lance un home l'axe z monte tout en haut sans s'arreter. Merci pour vos futures réponses :)
-
Salut, J'ai une vielle Crelaity cr10, que j'avais flashé avec Marlin, et qui a bien fonctionné pendant un moment. J'ai voulu m'en servir et lorsque je l'ai allumé, le buzzer était actif et j'avais stop à l'écran. Je n'ai aucune idée de quoi faire à ce problème. Si vous avez un avis je suis a l'écoute.

-
Salut Comme annoncé dans un autre post Et comme il pleuvait cet après midi en sortant du restau J'ai installé la dernière version officielle du firmware pour les Prusa MINI+ https://forum.prusa3d.com/forum/general-discussion-announcements-and-releases/4-4-0-firmware-for-original-prusa-mini-mini-final-release-is-out-now/ https://github.com/prusa3d/Prusa-Firmware-Buddy/releases/tag/v4.4.0 Je dirais que comme d'habitude et en suivant les instructions de Prusa tout c'est bien déroulé (Oui je sais ça devient lassant avec Prusa ) Le seul truc qui n'a pas fonctionné est la connexion au wifi à cause de mon module ESP01 qui ne fonctionne pas. J'avais déjà un doute avant de le connecter à la carte mère. Je vais devoir en acheter un autre. Il y a d'ailleurs une liste sur le net de modules et de vendeurs qui ont été testés/validés par la communauté -> https://docs.google.com/spreadsheets/d/1ql2TmS8O5Bkuf9SRhfP67RRD1isdThyN96f9M2KdSg4/edit#gid=0 Contrairement à une des versions antérieures tous les réglages restent en mémoire. Pas de réinitialisation usine J'ai lancé une petite impression juste derrière en utilisant l'interface web PrusaLink. J'ai aussi testé la possibilité d'envoyer un .gcode via PrusaSlicer. Dans les 2 cas la clé USB doit être connectée à l'imprimante pour stocker le .gcode envoyé Il y a maintenant une fonction de "chargement auto" du filament (comme sur la MK3S) si le détecteur de filament est présent. Bien pratique Il y a aussi une vérification du type de filament qui se fait avant de lancer l'impression. Si le filament chargé n'est pas le bon (ex PETG au lieu de PLA) il y a un message. On peut soit stopper l'impression, changer le filament ou ignorer le message. Je continue à explorer les autres nouveautés Donc si les possesseurs de MINI veulent passer à la 4.4.0 qu'ils n'hésitent pas @+ JC EDIT Ah j'oubliais... Il y a quand même un truc qui ne fonctionne plus c'est l'api/telemetry qui me permettait de remonter les info venant de l'imprimante vers mon système de Domotique A voir si je trouve une solution
-
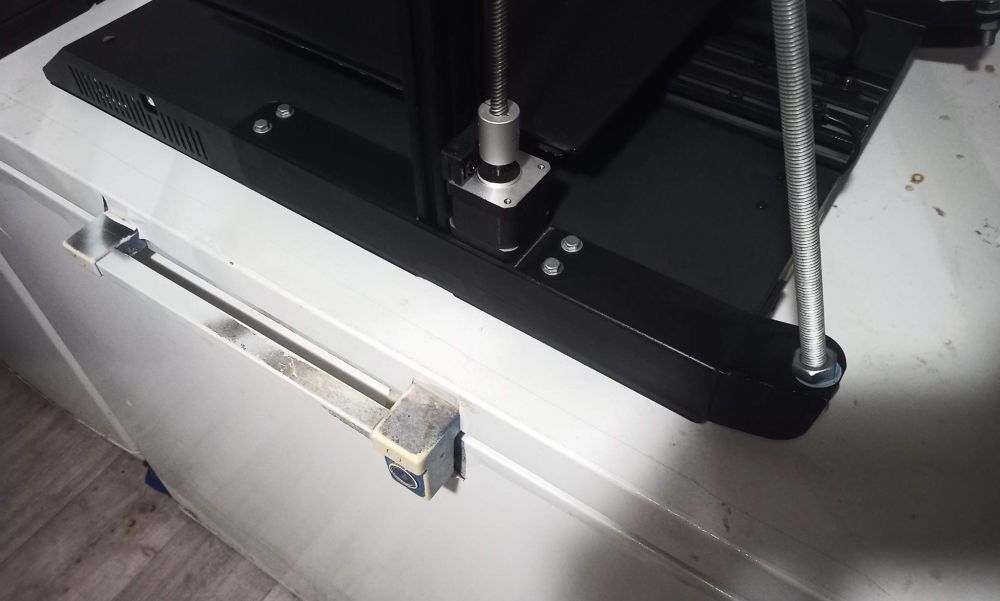
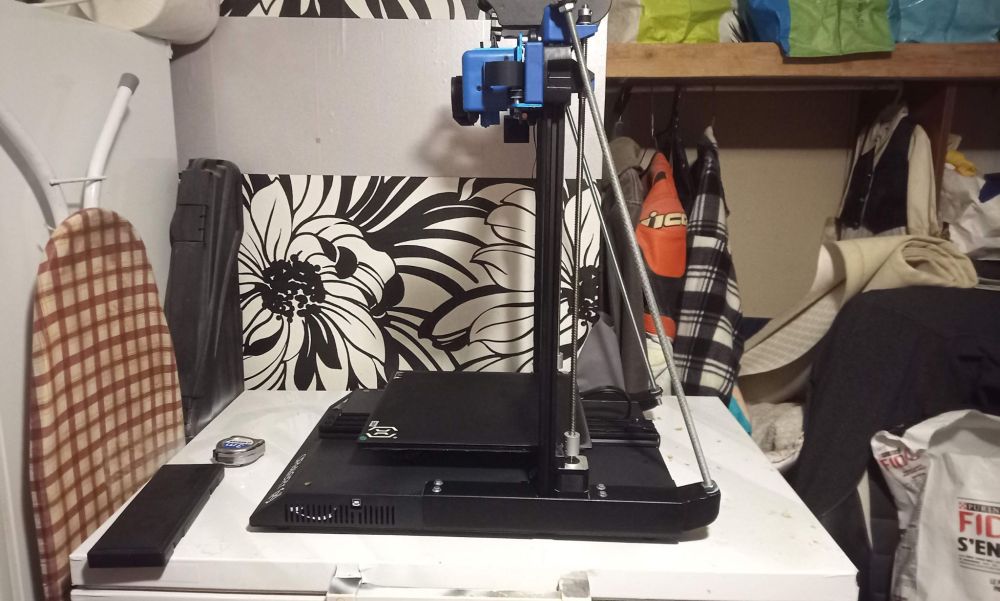
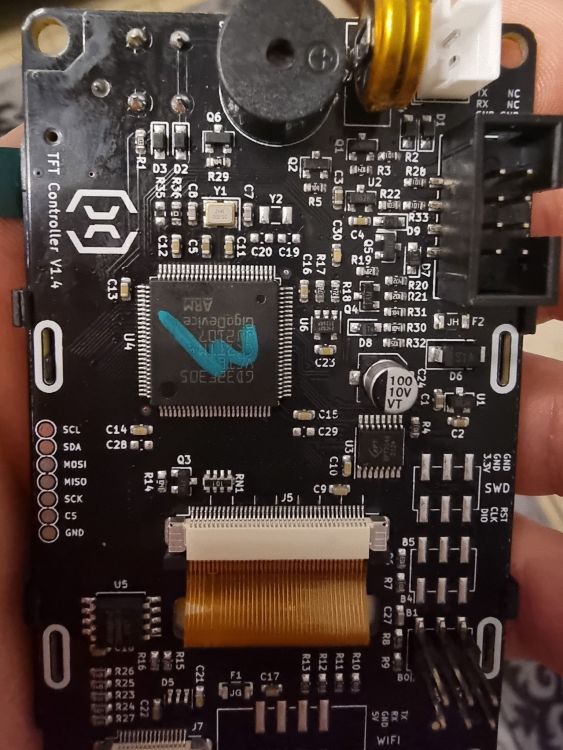
 Bonjour, Je vais évoquer 3 points sur le poste pour résumer au mieux mon problème J'ai changé la carte mère de l'écran et depuis j'ai plus aucune informations, comme si elle ne communiquait pas avec la main board Je l'ai mise a jour, j'ai maj la mainboard également.. Et je n'arrive plus a avoir un controller fonctionnel.. (Photo 1) Est ce que ca peut etre un problème matériel, la carte mère a été envoyé par le support de Artillery mais je ne la retrouve nulpart sur le marché c'est la V1.4 (Photo 2) Et pour finir, est ce que passer sur un firmware custom pourrait résoudre mon probleme.. ? Merci par avance si vous avez meme des pistes de réponses ou des liens !
Bonjour, Je vais évoquer 3 points sur le poste pour résumer au mieux mon problème J'ai changé la carte mère de l'écran et depuis j'ai plus aucune informations, comme si elle ne communiquait pas avec la main board Je l'ai mise a jour, j'ai maj la mainboard également.. Et je n'arrive plus a avoir un controller fonctionnel.. (Photo 1) Est ce que ca peut etre un problème matériel, la carte mère a été envoyé par le support de Artillery mais je ne la retrouve nulpart sur le marché c'est la V1.4 (Photo 2) Et pour finir, est ce que passer sur un firmware custom pourrait résoudre mon probleme.. ? Merci par avance si vous avez meme des pistes de réponses ou des liens !
-
bonsoir, j'ai un souci au niveau de mon imprimante creality ender 3 v 4.2.2 est t'il possible d'avoir le fichier bin et bootloader pour cette carte le pilote est noté c; c'est a dire celui la HR4988 d'apres ce que je sais je devrais flashé la mémoire eeprom mais la carte mere n'est pas reconnue par mon pc... que dois je faire svp ?
-
Bonjour, j'ai flashé ma X2 avec le tuto de Magounnet , merci a lui mais j'ai eu un bug avec la machine, mes impressions, jupe , se chevauchent enfin rien ne va. J'ai essayé de reinstaller le firmware d'origine mais rien y fait, ensuite j'ai tenté d'installer d'autres version de firmware (carte mere et ecran ) toujours rien. La machine ne se connecte pas à l'écran ?? Donc j'ai commencé par remplacer la carte mère pensant qu'elle avait un bug, mais non toujours rien l'ecran m'ecrit no printer connect J'aurai vraiment besoin d'un coup de main, j'aiu d'autre ecrans en RAB mais pas ceux de la X2, style un H43 ou si quelqu'un pouvait m'aider a mettre le dernier firmware d'origine ou m'aiguiller sur un firmware qui fonctionne avec l'ecran. Merci par avance
-

SKR 1.4 ne prend pas le firmware.
Sparrow Maker a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Salut les Makers ! J'ai un soucis, après avoir fait le tour de reddit et gitub avec mon anglais approximatif, je suis coincé. J'ai acquis un carte mère BIGTREETECH SKR 1.4 turbo avec pilote TMC2209 Pour une Anet a8PLUS. Après avoir modifié le câblage de ma machine pour correspondre au bonnes polarité de la carte, j'ai pu flasher un firmware test avec la carte SD afin de tester la bête. Tout va bien, tout les branchement sont corrects, j'ai mes retours sur Repetier des infos moteurs et de la version installée. Il me reste plus qu'a inverser le sens d'un moteur et paramétrer 2 trois petit truc. Une fois mes changements effectués et compilé via visual studio, je met le firmware.bin sur une SD formaté en fat32. Mais la SKR ne prend pas en compte ce firmware. J'ai essayé avec plusieurs SD. Je suis a cours d'idée Est il possible que la carte soit "briquée" ? Quelqu'un pour me sauver de ce casse tête ? Merci de votre lecture ! -
Bonjour à tous, A la suite d'un discussion sur un autre sujet qui a dérivé sur le firmware Molise, j'ai pu échanger avec @SH1NZ33 qui m'a convaincu de compiler mon firmware Molise 2.4 pour ma configuration de D12-230 perso. Vous trouverez ci-dessous un extrait de la conversation en question. Pour planter le décor voici quelques infos sur ma D12-230 et ce quelle a de différent de l'origine : Driver TMC2209 sur l'axe Z BL Touch Tête et refroidissement custom https://cults3d.com/fr/modèle-3d/outil/refroidissement-custom-wanhao-d12 J'ai donc compilé mon firmware avec les paramètres pour configuration, effectué la mise à jour sans problème et comme j'ai intégré en dur dans le fichier configuration.h pâs mal de paramètres que je commence à connaitre pour ma machine (Steps, PIB, décalage de mon BL Touch..) je n'ai pas grand chose à régler mis à part le Z offset et le Leveling du plateau. Et c'est là que les choses se sont compliquées pour moi ... Pour le Z offset d'après les infos de @SH1NZ33 dans la citation ci-dessus il y une fonctionnalité de "Z Offset Auto" et là je pense avoir trouvé cette option qui assiste le réglage en positionnant la buse au centre et avec divers réglages grossier et très fin pour arriver à une valeur optimale. Par contre pour le Leveling des 4 coins avant de faire un enregistrement du Mesh je n'ai pas compris comment le faire enfin surtout est ce qu'il y a un mode assisté (comme dans mon ancien firmware graphique) qui vient placer la buse à l'un des 4 coins et ainsi de suite. Toujours pareil @SH1NZ33 mentionne un mode Level Corner with Probe. Je me doute que ce mode devrait m'intéresser mais je n'ai pas d'idée de comment il fonctionne. Je pense que c'est le mode qui réalise les 4 coins avec le BL Touch et qui demande à la fin si les points sont dans la tolérance, mais la tolérance de quoi? Est ce que la valeur "Last Z" qui s'affiche a à voir avec le Z offset? Comment savoir si on est dans la tolérance? Car si je clique OK pour la tolérance le Bed préchauffe et l'enregistrement du Mesh se fait. Voilà j'espère avoir été assez clair et merci par avance à tous ceux qui pourront m'aider.
-
 jarrive pas a build mon firmware pour mon imprimante si une personne peux maide sa serais vraiment gentil (ps: je utilise Visual Studio Code pour faire cette tache
jarrive pas a build mon firmware pour mon imprimante si une personne peux maide sa serais vraiment gentil (ps: je utilise Visual Studio Code pour faire cette tache -
Bonjour, J’ai fait l’acquisition d’une Ender 3 il y a deux semaines, ne trouvant pas satisfaction avec l’ajustement du plateau manuel (je n’arrivais pas à le régler proprement sur l’ensemble de la surface). J’ai donc voulu me simplifier la vie avec un capteur pour l’auto-nivèlement, j’ai acheté un BLtouch 3.1 sur amazon, je l’ai installé en suivant parfaitement la notice d’installation. Arrivé au moment de cliquer sur « bed level », le capteur commence à palper pour s’arrêter en clignotant à un des points de test car le plateau est théoriquement trop bas. J’ai passé plusieurs soirées à faire des essaie en réglant le plateau à chaque fois le teste échouait (le point n’était pas forcément le même). J’ai régle parfaitement le plateau, le bed level a réussi les 9points. Je redémarre la machine et là le même teste échoue à un point, et quand je redémarre ça échoue mais pas forcèment au même point. Je suis désespéré...(je suis à plus de 12h au total sur ce problème...) avez-vous une idée ? Bon je vais détailler toutes les étapes que j’ai fait pour montrer que j’ai bien tout suivi… Brancher correctement le BLtouch L’installé correctement Bouger le capteur Z Classique Regarder pour voir la carte mère, c’ est une marlin 4.2.2 Installé son frimeware correspondant (celui sur le site de creality) faire chauffer le bed Auto home, calculer l'offset , auto home, Changer l’offset , cliquer sur bed level et pleurer… Voici quatre exemples avec les même parmamétres, j'ai juste rallumé la machine et refait les étapes 5 et 6…(pas touché au réglage du plateau) https://www.youtube.com/shorts/lSv6dDePNtU https://www.youtube.com/watch?v=HrW4APrdfP4 https://www.youtube.com/shorts/IQwCsX0zwxI https://www.youtube.com/shorts/ZIiFbm1Wuvg