Vinchator
-
Compteur de contenus
16 -
Inscrit(e) le
-
Dernière visite
Récompenses de Vinchator
")





-
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Merci je vais réfléchir un peu comment je vais faire ça -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Okay et a la longue du jeu se créé ? Je pense essayer de créer un logement en dessous aussi et de serrer la pièce des deux côtés -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
La partie à droite -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Okay... Mais comment le mouvement de rotation est transmis si il y a juste un ecrou dans la pièce ? Le bras 3 devrait tourné dans le vide si il n'y a pas un ecrou sur le dessous -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Donovan tu peux stp m'en dire plus sur ta modification du bras 3 ? Comment l'axe 8mm tiens dans la pièce ? -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
C'est une bonne remarque si c'est le cas je les change contre les renforcées -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Au fait j'ai commandé de la courroie caoutchouc ya pas photo c'est plus fit par contre a voir à l'usure comment -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
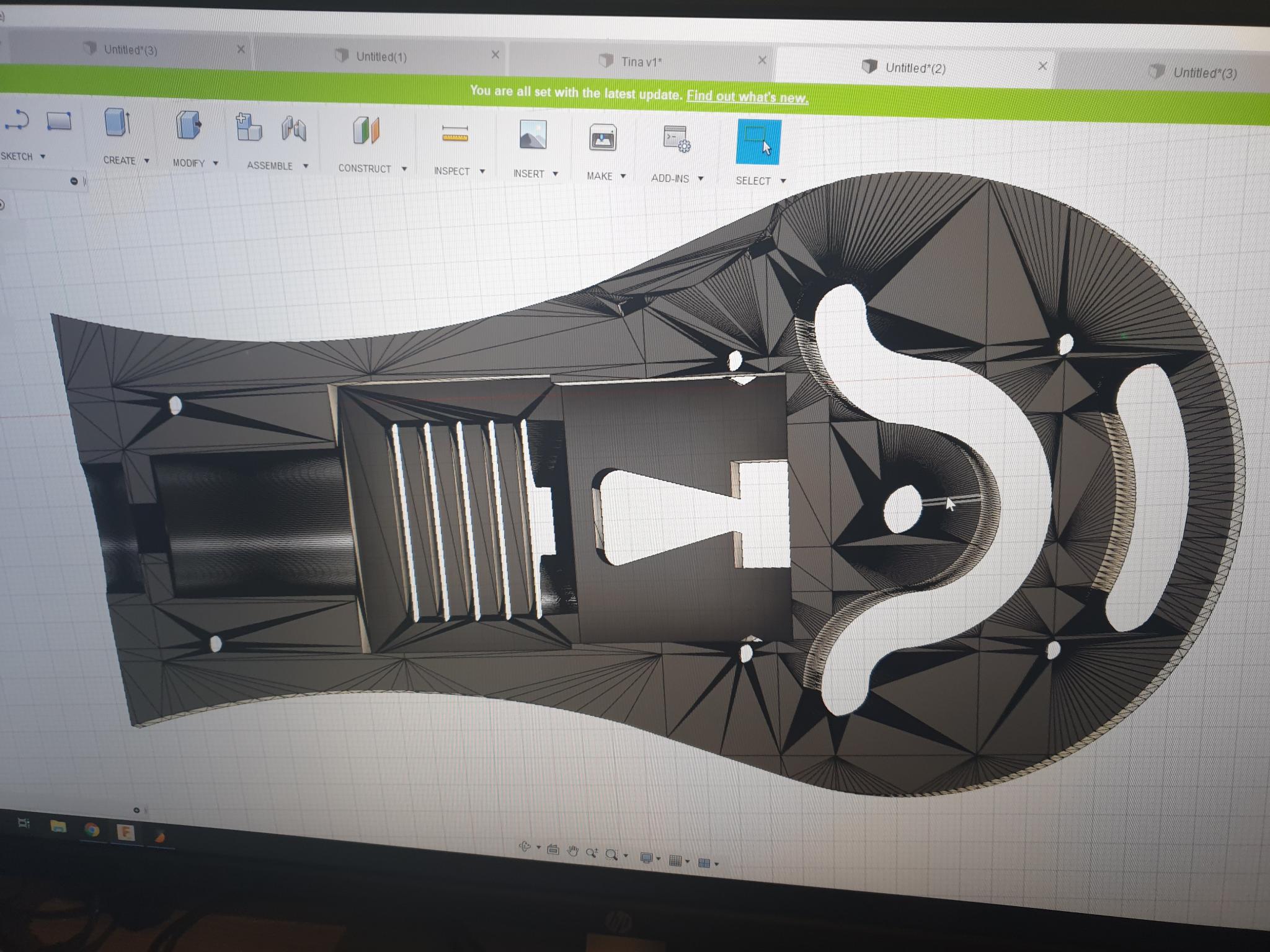
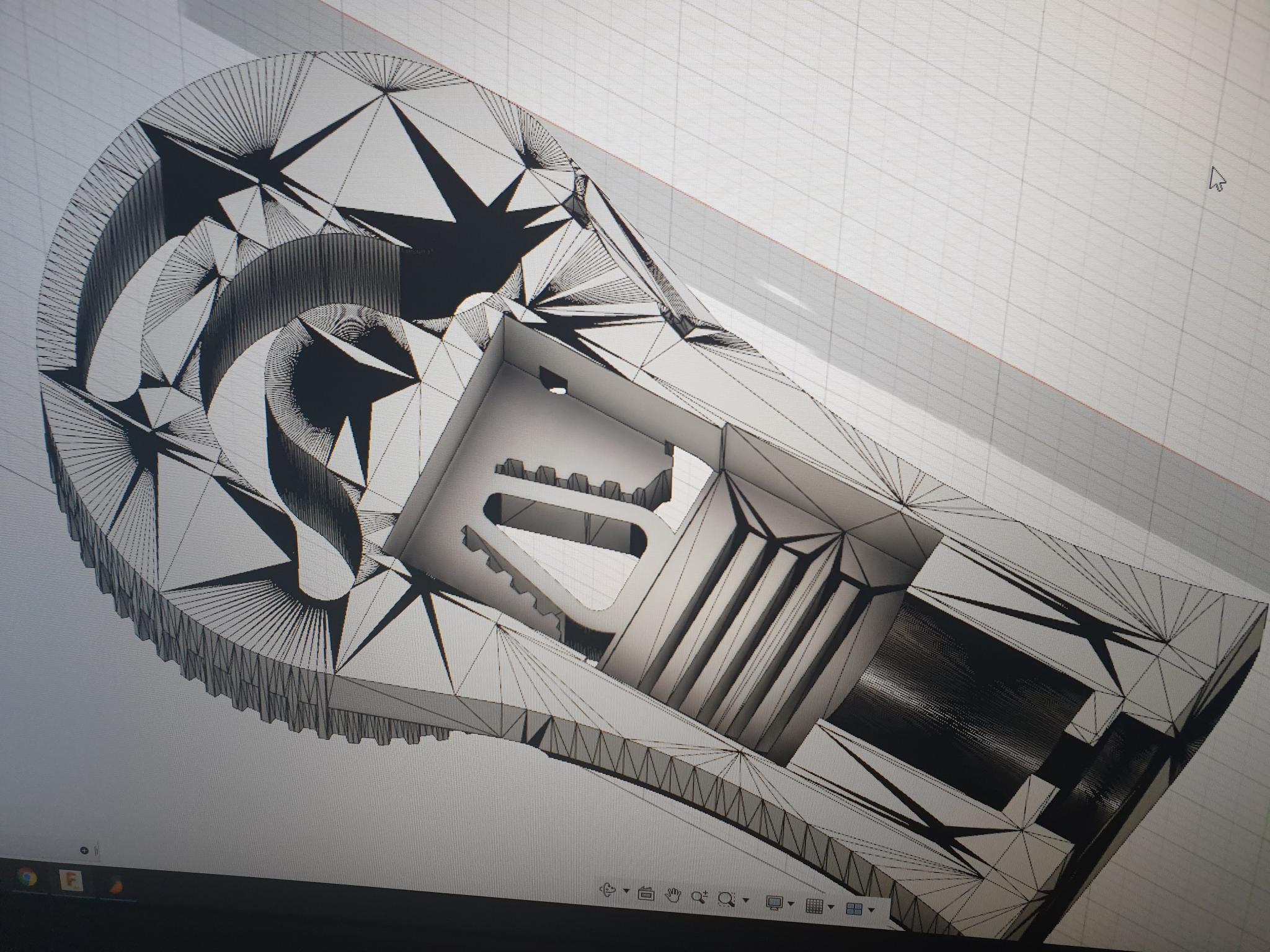
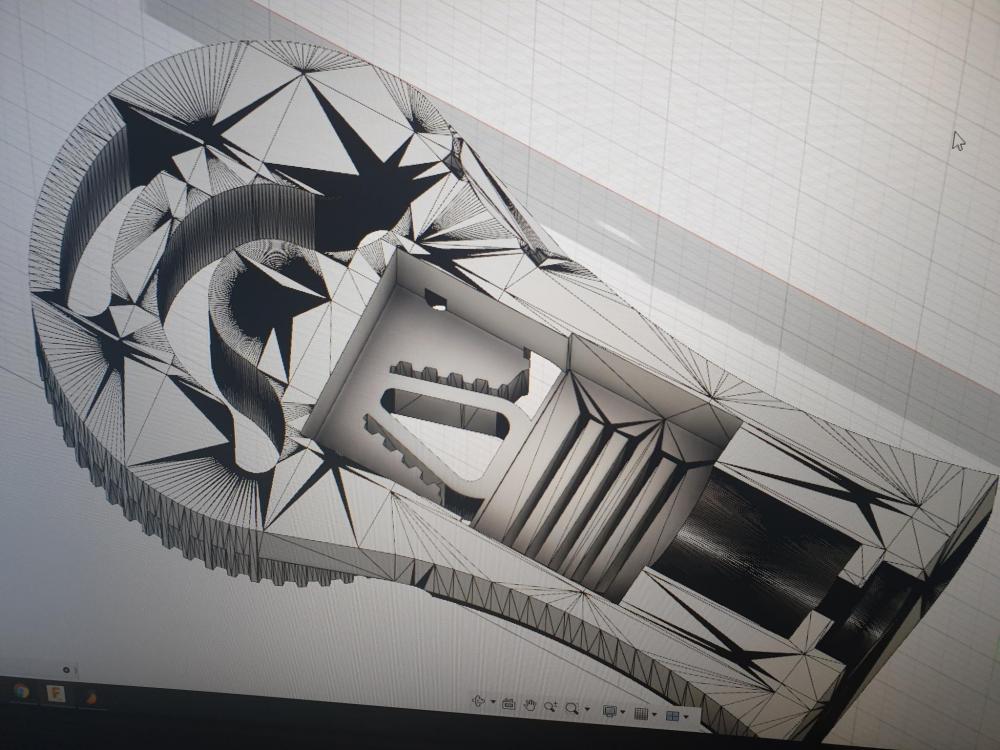
Merci ... J'ai modifié l'articulation 3 pour accueillir le motoreducteur si quelqu'un veut les STL no problemo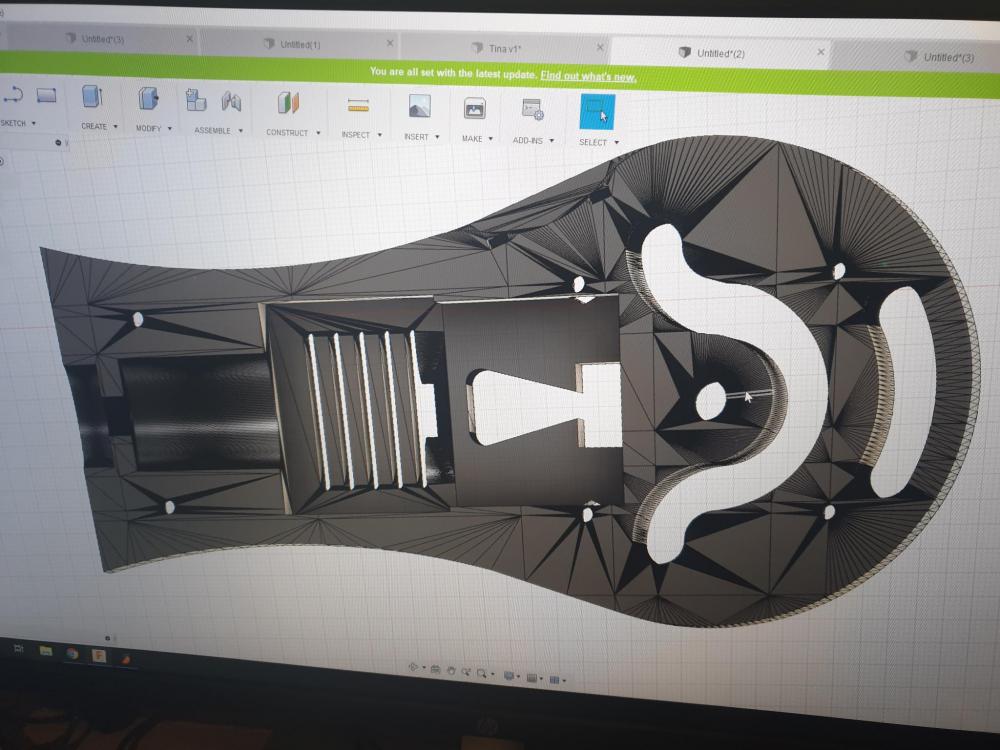
-
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Avancée de l'assemblage du bras
-
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
J'ai enlevé les serres joints maintenant c'est pas mal... Avancée de la mallette...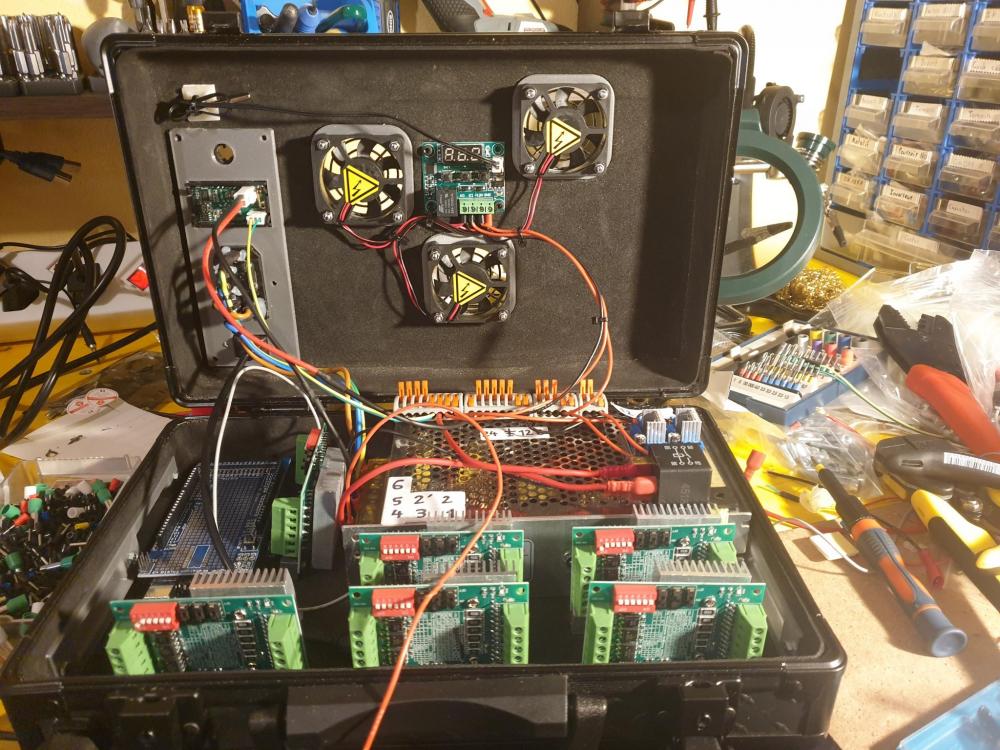
-
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Je trouve que les dents de la courroie T5 en polyuréthane blanc avec le noyau en acier sont décalées par rapport au profil denté de la poulie car la courroie est assez rigide donc je laisse ces serres joints pour bien donner la forme courbe à la courroie.
-
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
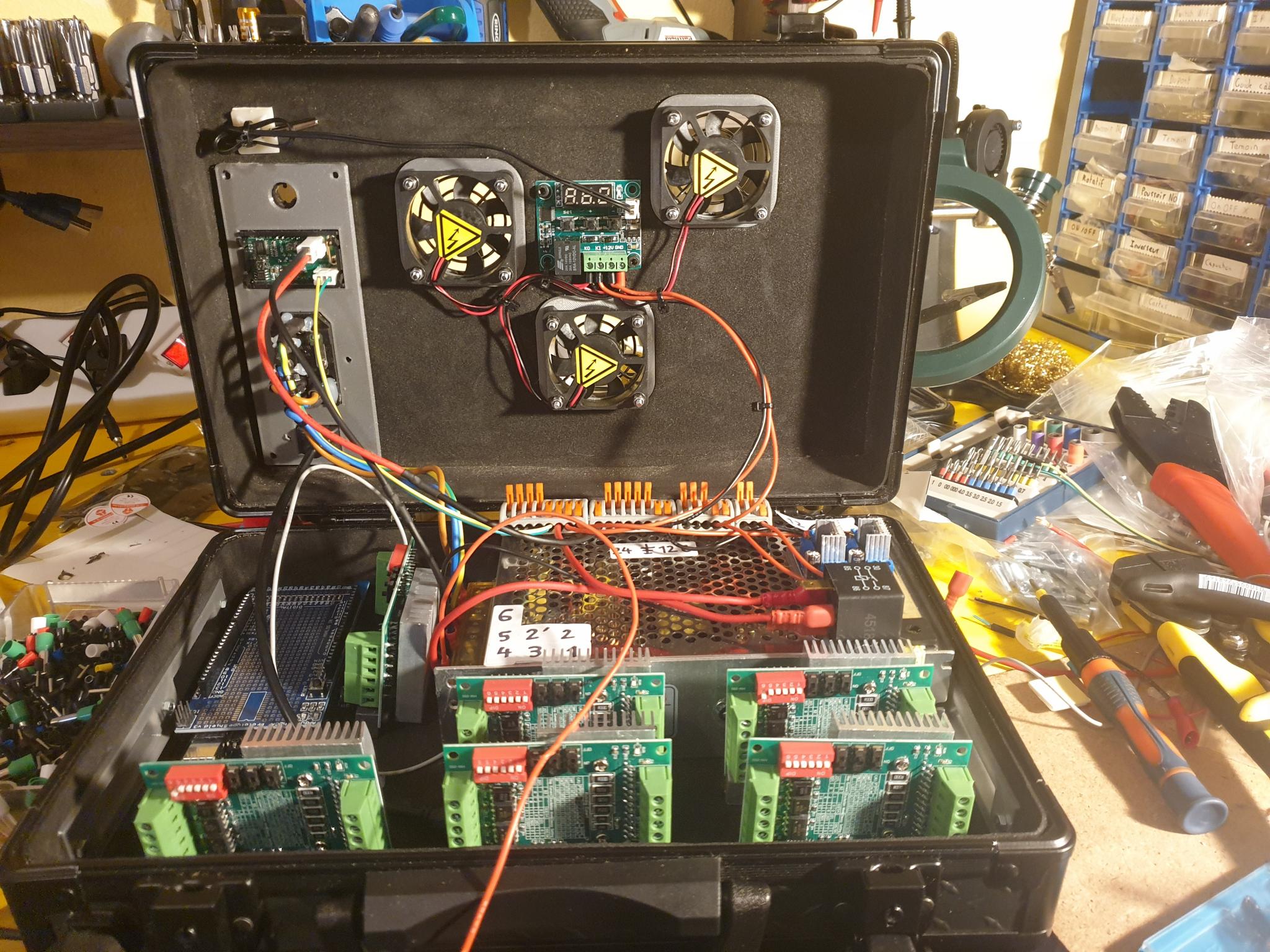
Ces jours je suis sur l'électronique j'ai choisis de mettre le tout dans une valise qui se tiendera debout... L'alimentation se fait en 230v direct sur la valise et les câbles des moteurs sortirons par un presse étoupe puis sur une prise db37. Il reste à insérer les 7 drivers tb6560 et câbler le tout. J'ai mis un petit thermostat pour les ventilos pour le fun et un module ampermetre voltmetre pour surveiller la conso des moteurs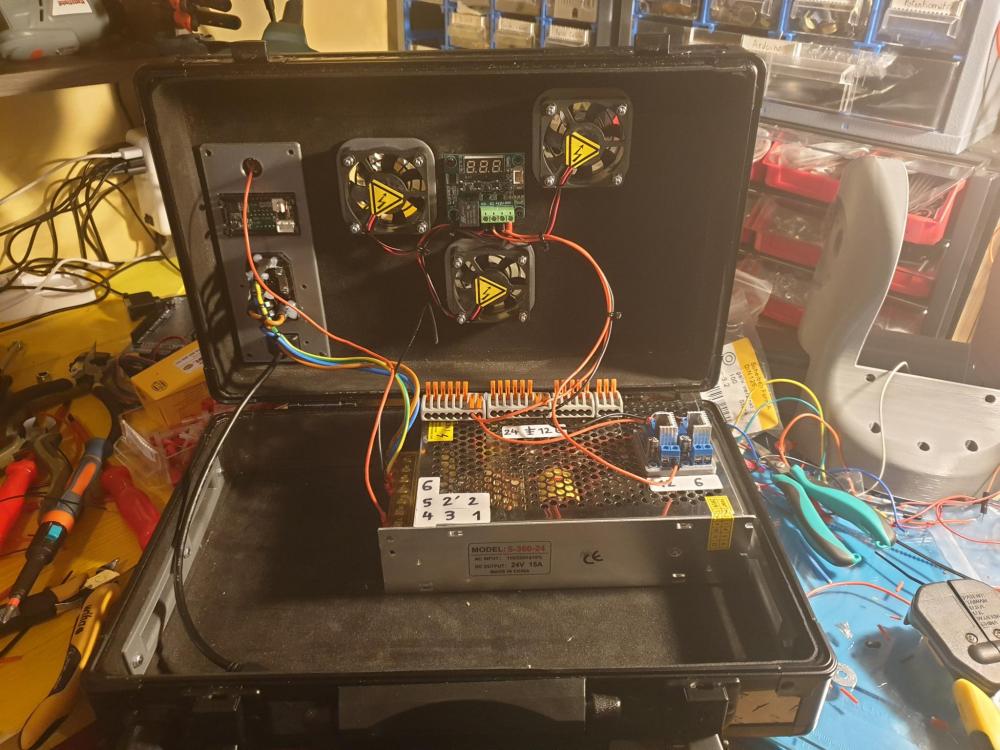


-
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Merci Donovan... J'aimerais poster sur mon bras moveo ... Je peux le faire dans ta rubrique ou tu préfères que je commence un nouveau sujet ? -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
#include <AccelStepper.h> const int enablePin = 8; AccelStepper stepper_Rotation1(1,2,5); AccelStepper stepper_Bras1(1,52,53); AccelStepper stepper_Bras2(1,3,6); AccelStepper stepper_Rotation2(1,4,7); AccelStepper stepper_Bras3(1,12,13); AccelStepper stepper_Rotation3(1,14,15); AccelStepper steppers[6] = {stepper_Rotation1, stepper_Bras1, stepper_Bras2, stepper_Rotation2, stepper_Bras3, stepper_Rotation3}; int vitesseMax_steppers[6] = {1000, 10000, 1500, 250, 500, 250}; int acceleration_steppers[6] = {8000, 1000000, 8000, 8000, 8000, 8000}; int vitesse_steppers[6] = {200, 10000, 200, 200, 200, 200}; int mouvement_steppers[6] = {10000, 10000, 10000, 10000, 10000, 10000}; void setup() { initialisation(); mouvements(); } void loop() { for (int i = 0; i < 6; i++) { steppers.run(); } } void initialisation(){ pinMode(enablePin, OUTPUT); digitalWrite(enablePin, LOW); for (int i = 0; i < 6; i++) { steppers.setMaxSpeed(vitesseMax_steppers); steppers.setAcceleration(acceleration_steppers); steppers.setSpeed(vitesse_steppers); } } void mouvements(){ for (int i = 0; i < 6; i++) { steppers.moveTo(mouvement_steppers); } } Avec ce code les moteurs ne tournent pas ou font des tacs étranges... Comment je peux faire si apres je veux donner plusieurs instruction de position de moteur à la chaine ? -
[ROBOTIQUE] Bras robot BCN3D Moveo
Vinchator en réponse au topic de Donovan-88 dans Projets et impressions 3D
Okay je vais donc essayer de modifier ca avec fusion... Et il faut replacer les trous de fixations ce ne sont pas les mêmes avec le reducteur non ? Je prend de l'avance sur la programmation je me familiarise avec la librairie AccelStepper mais j'ai pas mal de peine