Chercher dans la communauté
Résultats des étiquettes.
6 résultats trouvés
-
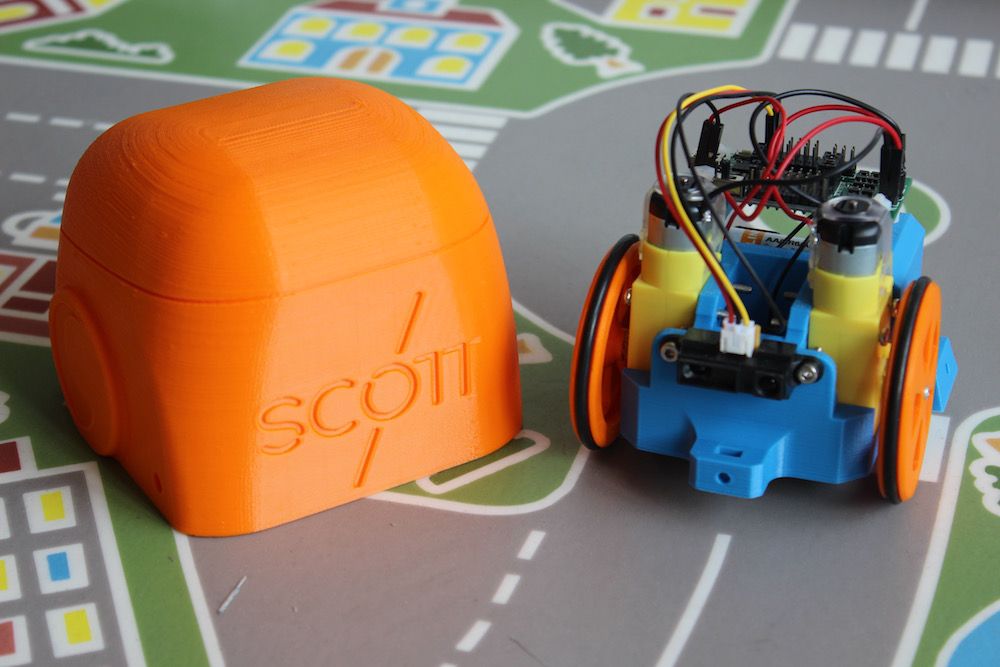
Bonjour à tous ! Une nouvelle box est disponible chez Dagoma : SCOTT le petit robot pédagogique Cette box a été réalisée en partenariat avec le programme de robotique de La Machinerie, un tiers lieux amiénois disposant, entre autre, d'un FabLab. Etant l'auteur de la box, j'ai créé ce topic. Si vous voulez des renseignements ou si vous avez des retours sur la Box, n'hésitez pas à me contacter ;-) A bientôt !
- 43 réponses
-
- 1
-

-
- robotique
- discovery200
- (et 1 en plus)
-
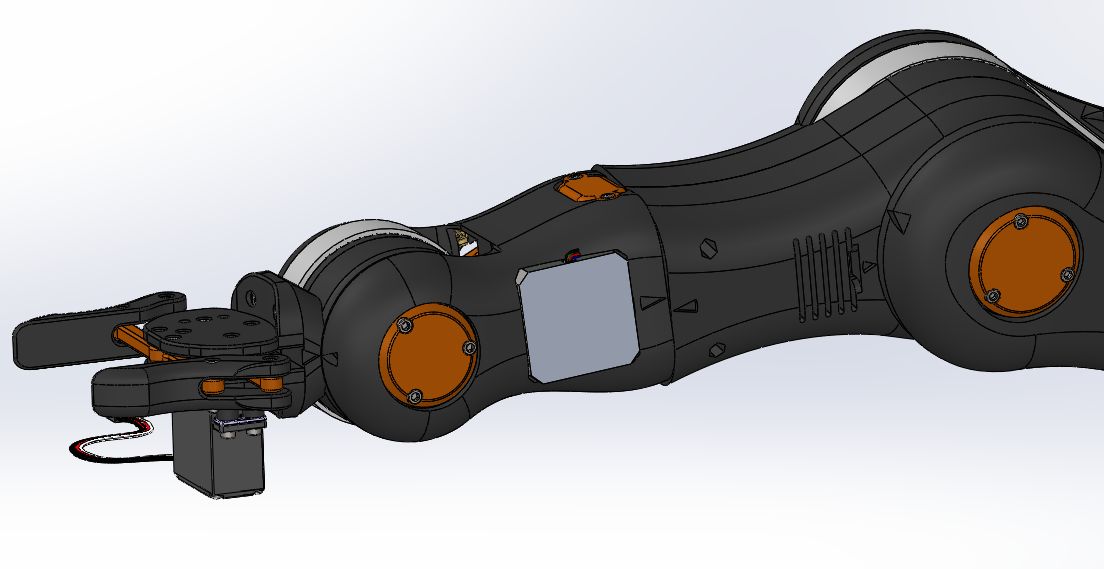
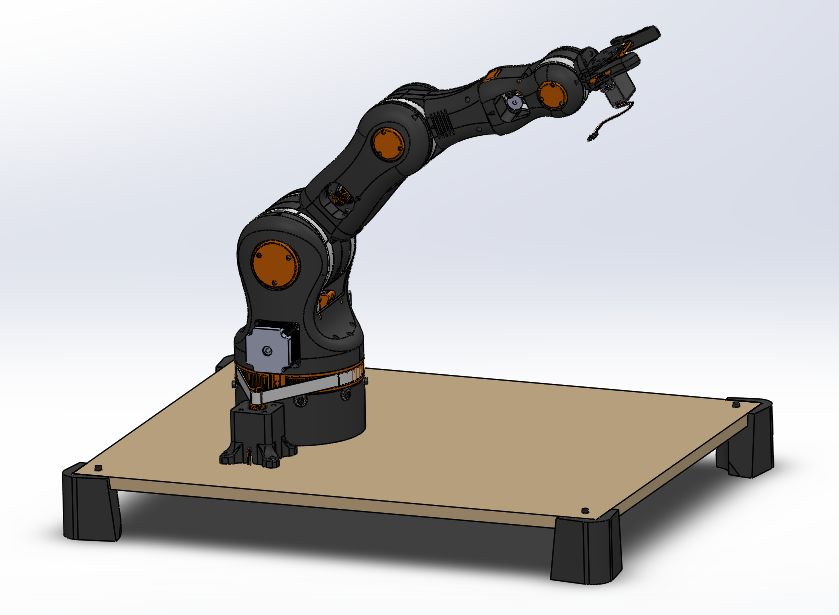
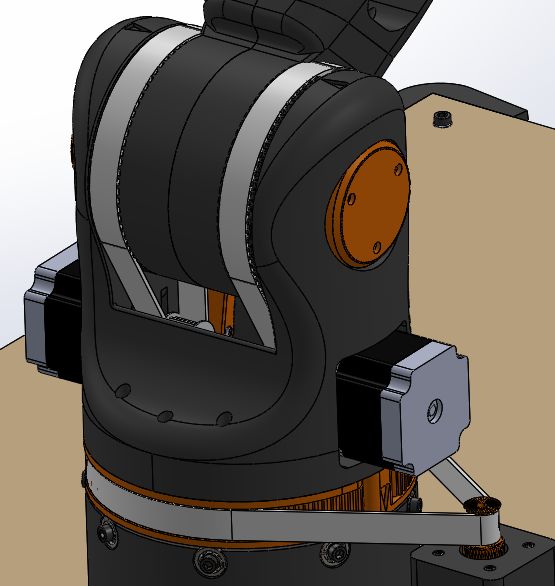
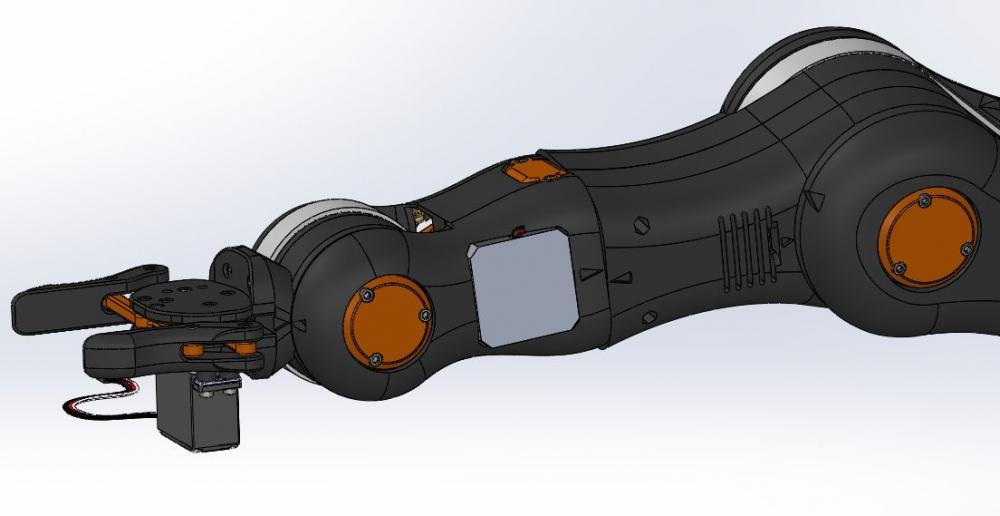
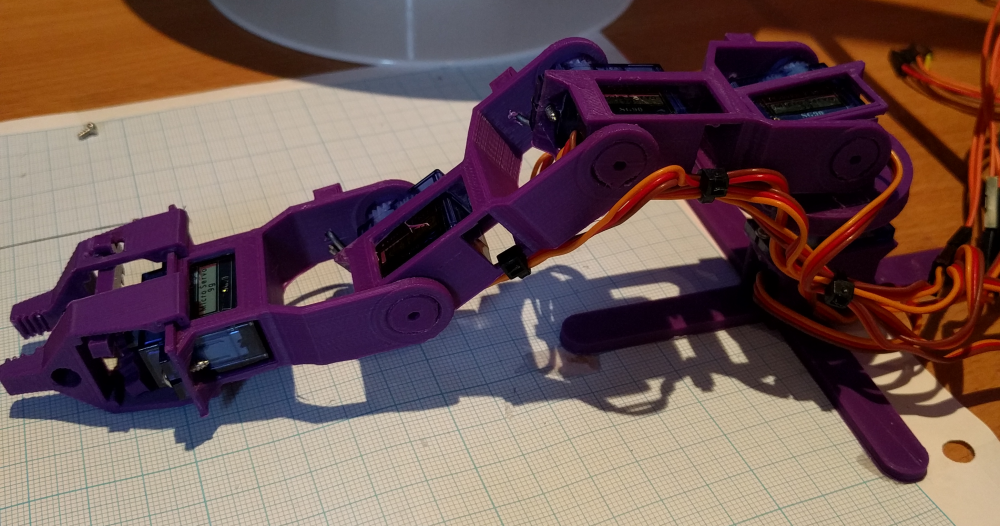
Bonjour Je viens de me lancer dans le projet d'imprimer et programmer un bras robot conçu par BCN3D. Ce bras robot s’appelle le BCN3D Moveo et est en grande partie à imprimer, le reste c'est des roulements, des vis et de électronique... Voici leur vidéo de présentation : Ils fournissent tous les fichiers nécessaire tel que les STL's, les fichiers 3D Solidworks, une BOM, un manuel utilisateur pour l'assemblage et un firmware Marlin modifié pour contrôler 3 axes du robot (je ne m'en servirai pas). Les fichiers Solidworks m'ont été très utiles pour pouvoir modifier quelques pièces par rapport au moteurs que je vais mettre, y intégrer les courroies et pour définir la couleur final. Tout est disponible sur le github dédié au BCN3D Moveo. J'ai gardé le noir mais j'ai remplacé le bleu par du orange (encore du orange ). D'ailleurs, je vais modifier certaines pièces orange pour y intégrer un guidage des fils. Comme on peut le voir, il est assez imposant, ce qui signifie que ma Core XY va avoir du taf . J'ai commandé toutes les pièces hier soir et la plupart sont déjà expédiées (sont rapide les chinois ). Avant de me lancer dans ce projet, j'ai débuté avec un bébé bras robot trouvé sur Thingiverse : Je l'ai programmé en cinématique inverse pour en faite lui donner simplement les coordonnées en X, Y et Z au bout de la pince et le robot se charge de calculer les angles lui même des différents bras (d'où le papier millimétré). Le problème c'est que les servo-moteurs la sont un peut merdique et ne son donc pas précis. Mais la théorie fonctionne. Voici le cours que j'ai trouvé et qui m'a servi à apprendre la cinématique inverse : Bras robotisé 5 servomoteurs avec pince Le cours de math qui permet de comprendre la chose Pour contrôler le Moveo, je vais utiliser un Arduino Mega 2560 R3 couplé à une Ramps 1.4 (comme nos imprimantes ) avec des drivers A4988 pour les Nema 17 et des TB6560 pour les deux Nema 23. Je ferais une interface de contrôle avec un petit LCD et différents boutons pour choisir les modes et lui apprendre des choses. (j'en suis pas encore la). Demain je vais commencer à imprimer les parties du robot A+
-
 Bonjour, J'ai imprimé toute les pièces du bras Moveo de BCN3D et je les ai assemblées. Jusque là pas de problème... J'ai acheté les moteurs pas-à-pas qui mettent en mouvement les articulations, le servomoteur pour la pince, une carte Ramps 1.6, des drivers Tb6560 et une carte arduino Mega. Jusque là ça va... Avec de l'aide, j'ai effectué le branchement électrique d'un moteur pas-à-pas et d'un servo moteur sur le driver , la carte Ramps 1.6 et l'Arduino. J'ai lu sur ce forum des messages concernant une library AccelStepper, un firmware Marlin, mais je ne sais pas ce qu'il faut utiliser. Dans un premier temps, je voudrais juste mettre en mouvement (rotation de 30 degrés par exemple) un moteur pas-à-pas et d'un servo moteur (ouverture et fermeture de la pince). Je pense qu'ensuite, je pourrai faire de même avec les 4 autres stepper. Pouvez-vous m'aider en me guidant ? Philippe
Bonjour, J'ai imprimé toute les pièces du bras Moveo de BCN3D et je les ai assemblées. Jusque là pas de problème... J'ai acheté les moteurs pas-à-pas qui mettent en mouvement les articulations, le servomoteur pour la pince, une carte Ramps 1.6, des drivers Tb6560 et une carte arduino Mega. Jusque là ça va... Avec de l'aide, j'ai effectué le branchement électrique d'un moteur pas-à-pas et d'un servo moteur sur le driver , la carte Ramps 1.6 et l'Arduino. J'ai lu sur ce forum des messages concernant une library AccelStepper, un firmware Marlin, mais je ne sais pas ce qu'il faut utiliser. Dans un premier temps, je voudrais juste mettre en mouvement (rotation de 30 degrés par exemple) un moteur pas-à-pas et d'un servo moteur (ouverture et fermeture de la pince). Je pense qu'ensuite, je pourrai faire de même avec les 4 autres stepper. Pouvez-vous m'aider en me guidant ? Philippe -
Voici une camera une camera qui cherche et traques les visage que j'ai réalisé il y a quelques mois et dont je viens de rentre disponible toutes les pieces et codes . La camera est branchée à un ordinateur sur lequel tourne un logiciel de détection de visage . Une fois un visage détecté le logiciel envoie un signal a un arduino situé en dessous de la caméra . Ce arduino pilote 2 servos qui bougeront la caméra en direction du visage détecté . Voici les pieces composants ce robot (OK, j'ai du mal a trouver les réglages qui fonctionne bien avec le filament Verbatim...) : Les pieces sont disponible sur mon site ----> www.littlefrenchkev.com <---- Pour tout ce qui concerne l'assemblage et les réglages et le fonctionnement, j'ai créé quelques videos . Intro : Ce dont vous aurez besoin : Assemblage : Cablage : Réglages et logiciel : Malheureusement je n'ai pas d'image ou de video du développement .
-
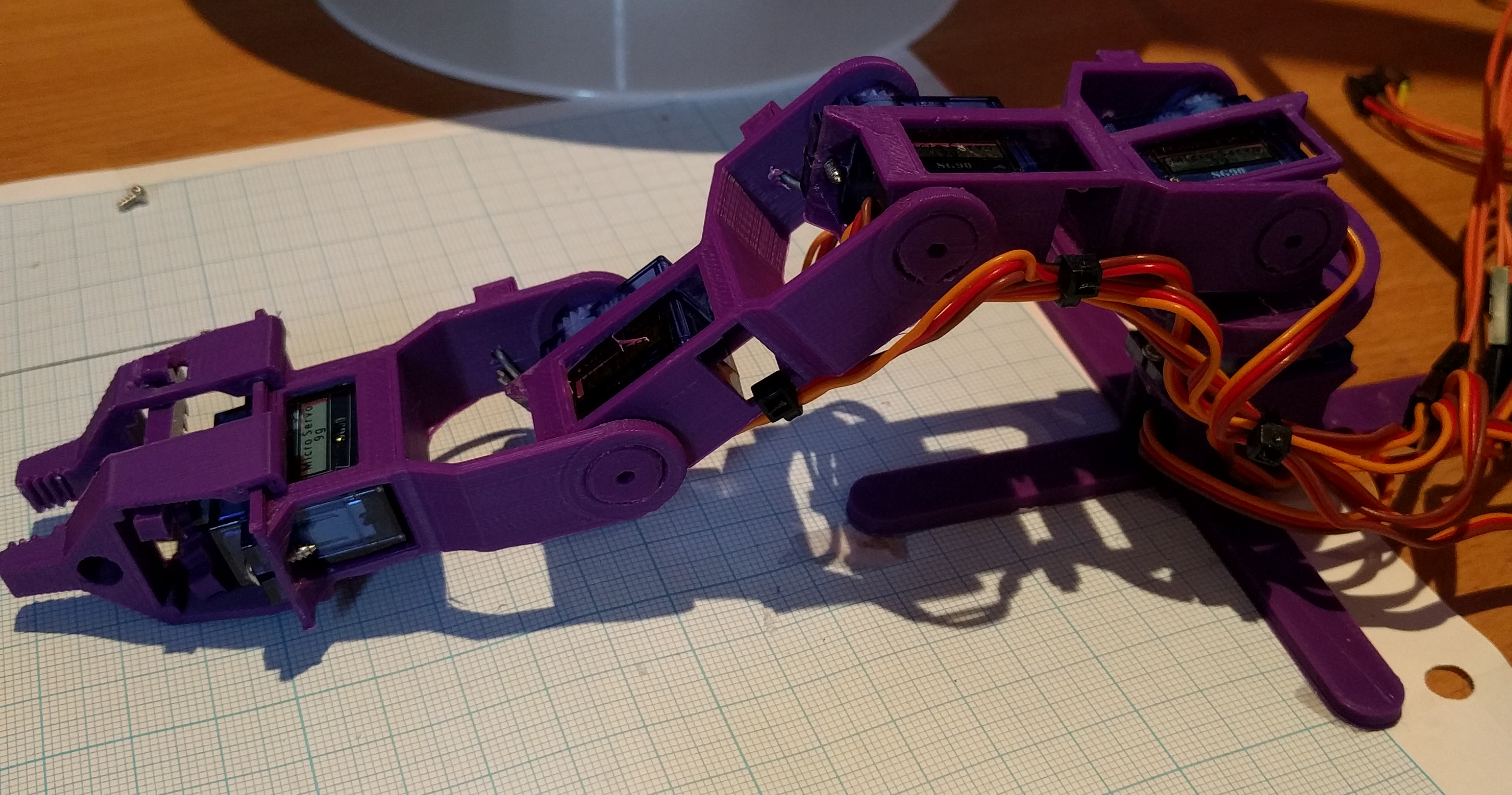
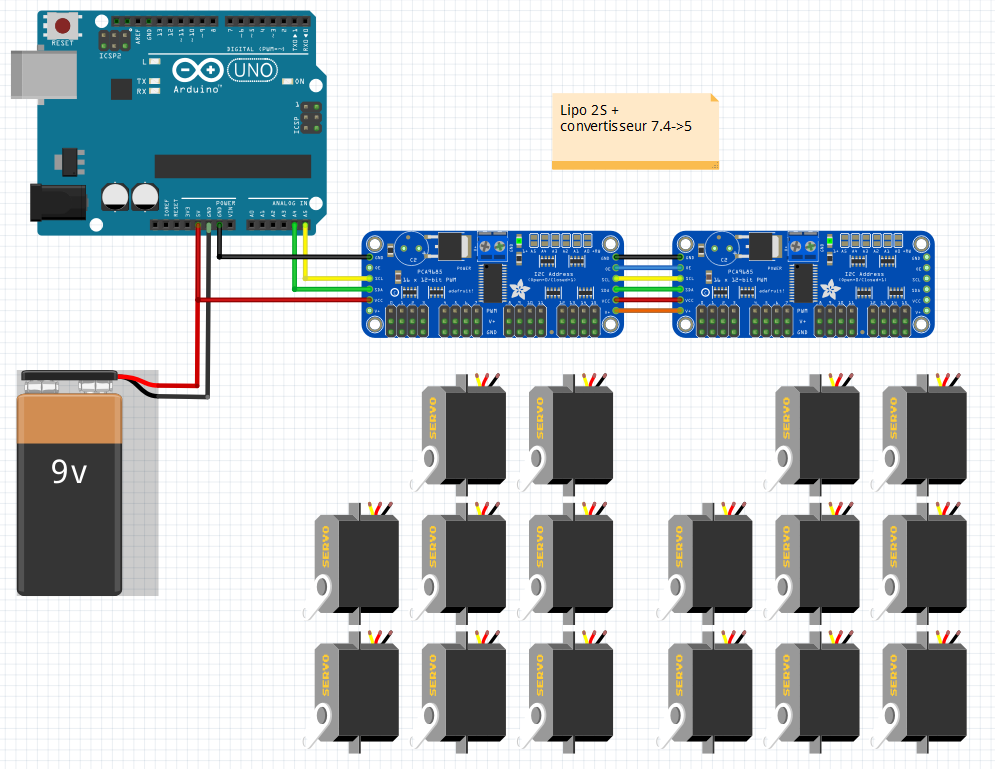
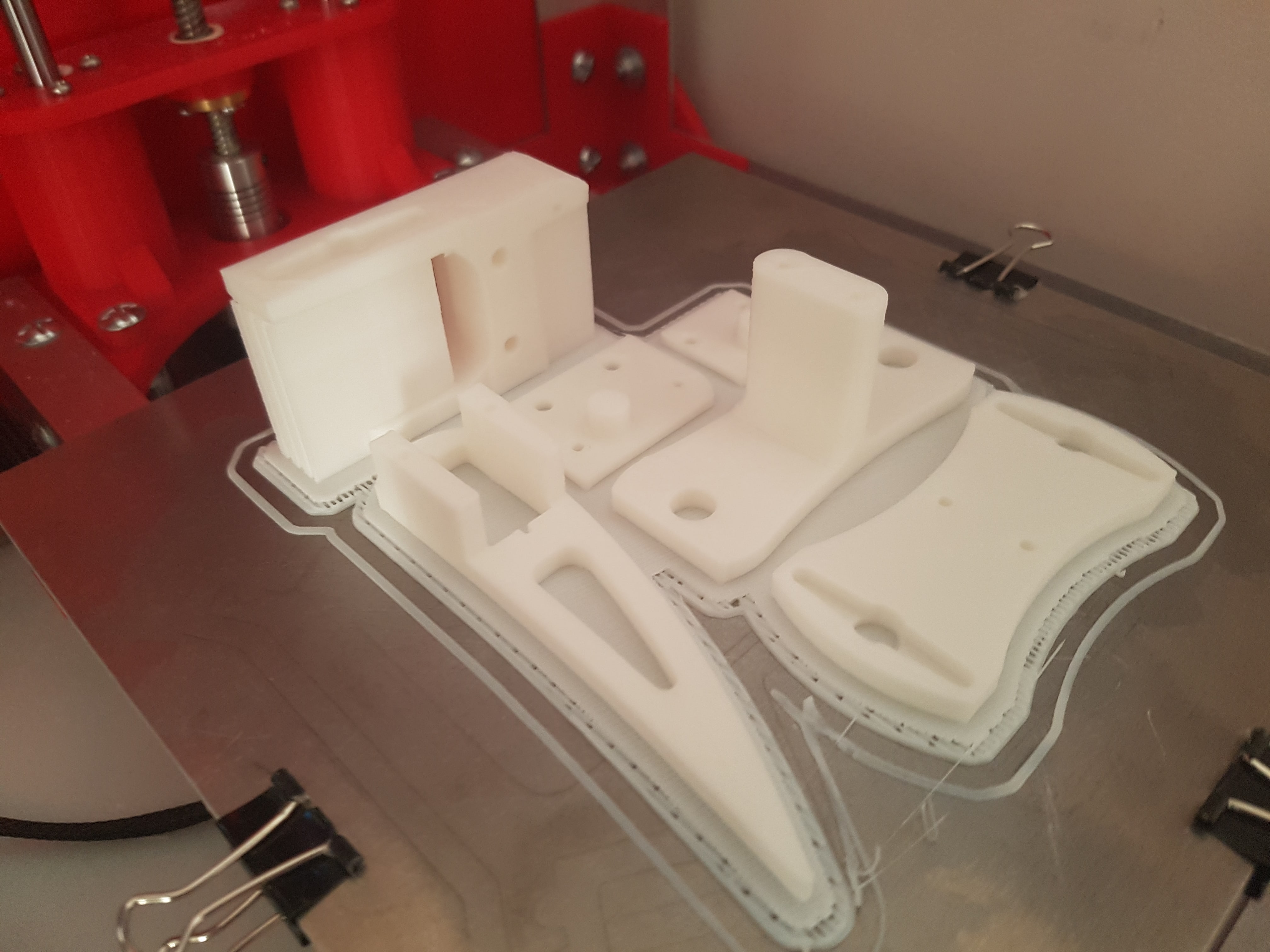
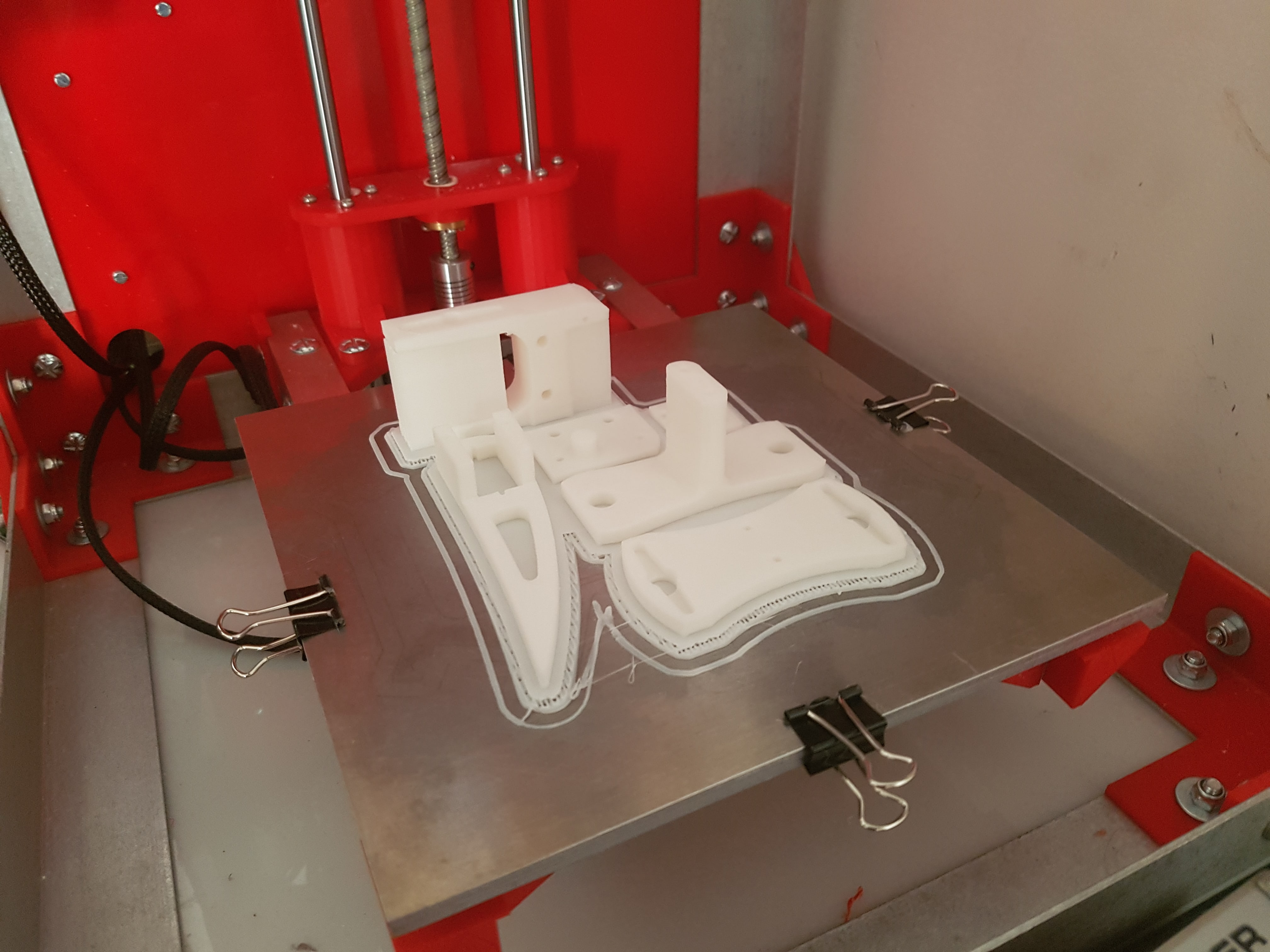
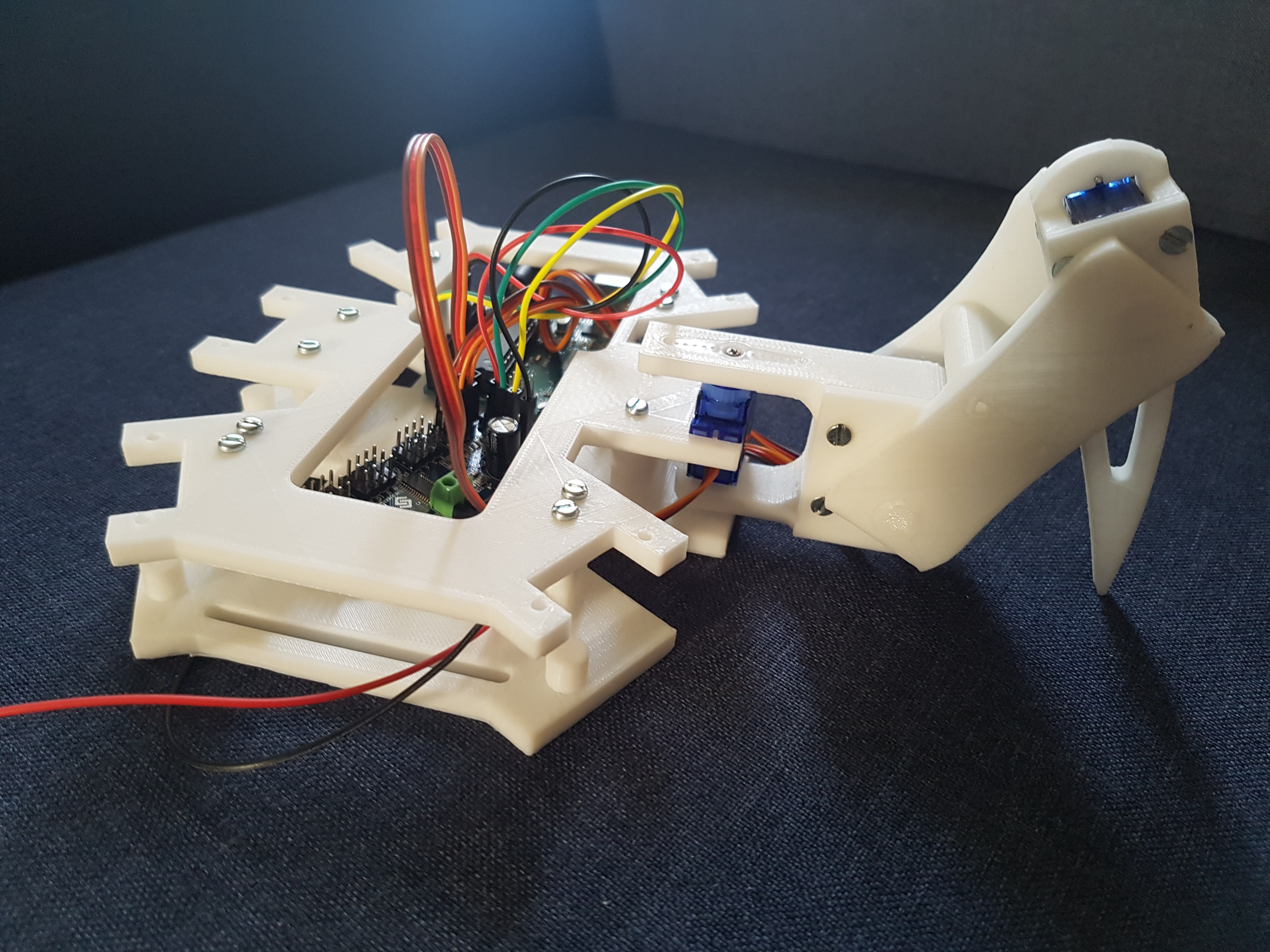
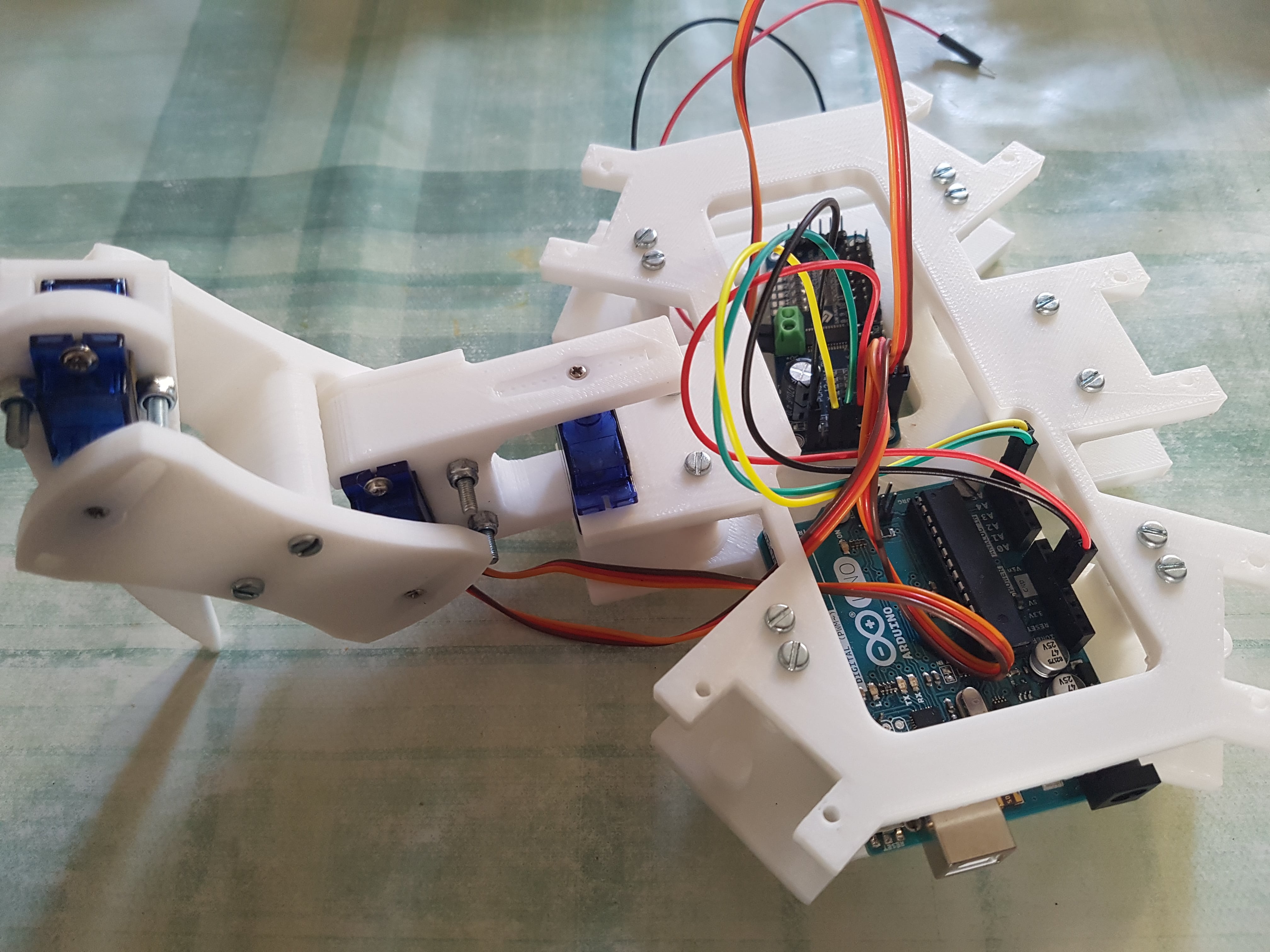
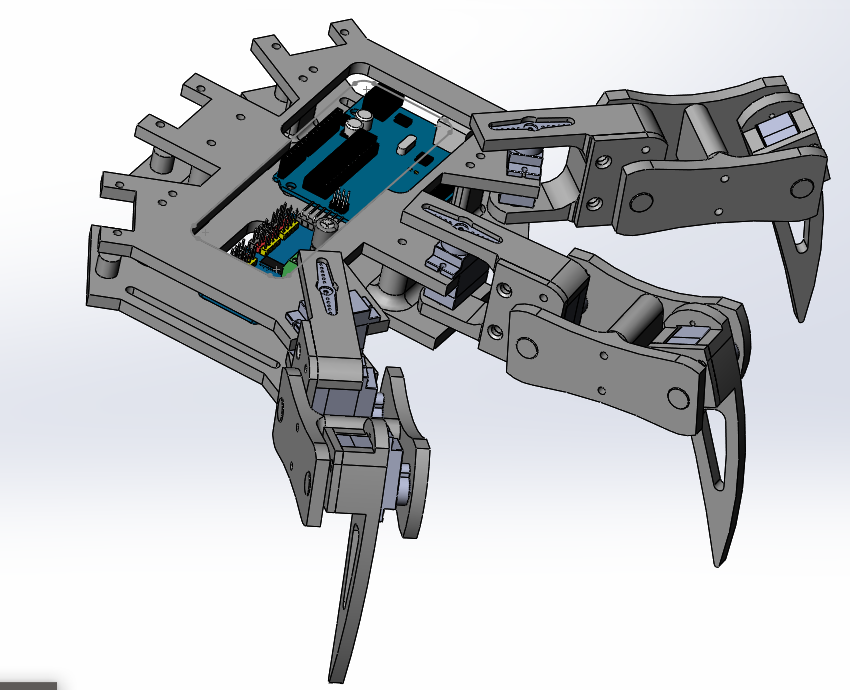
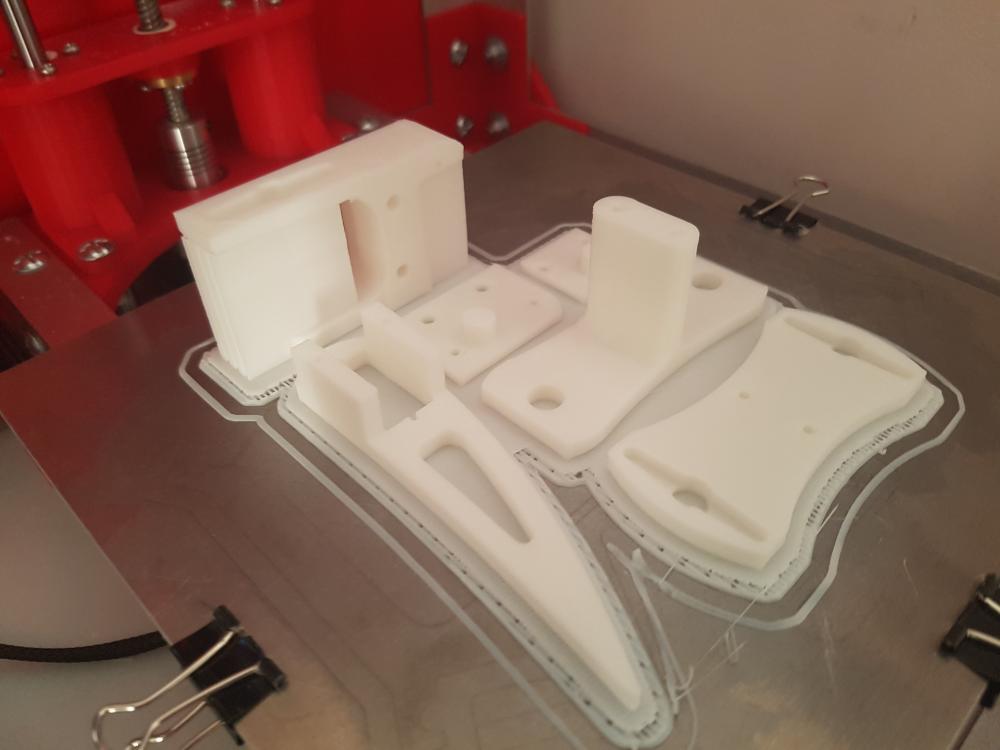
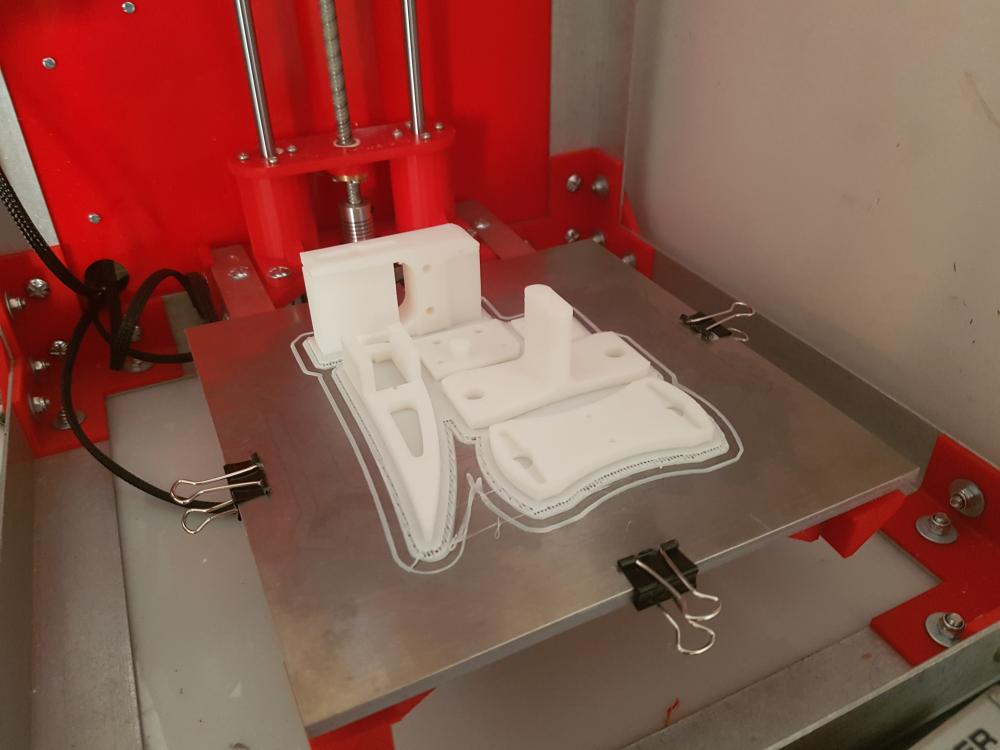
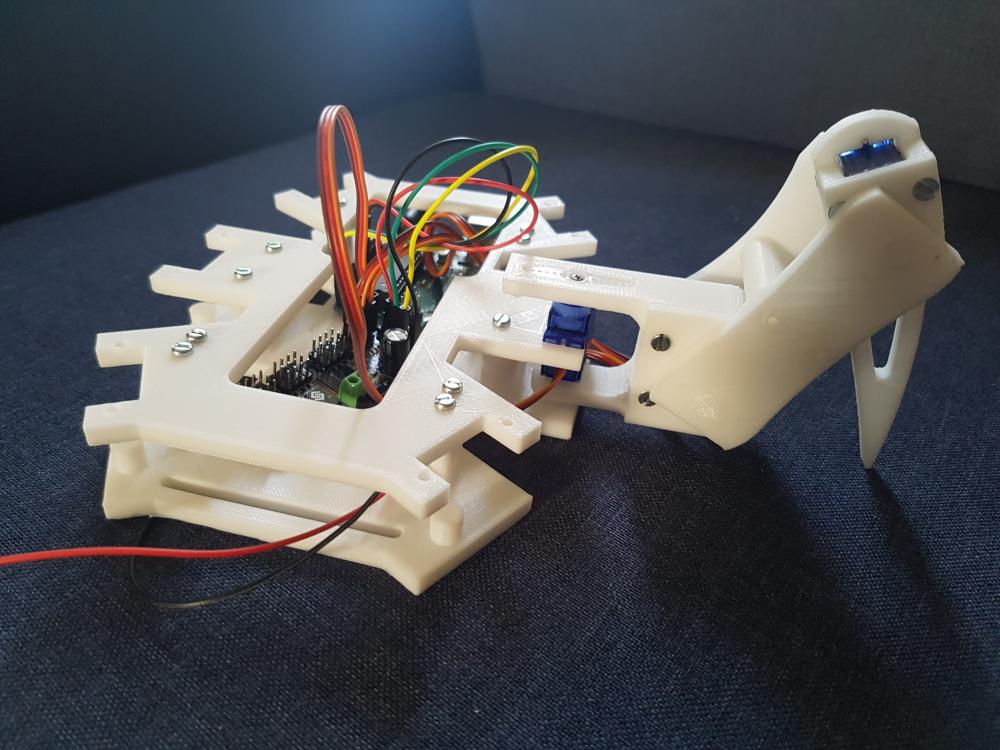
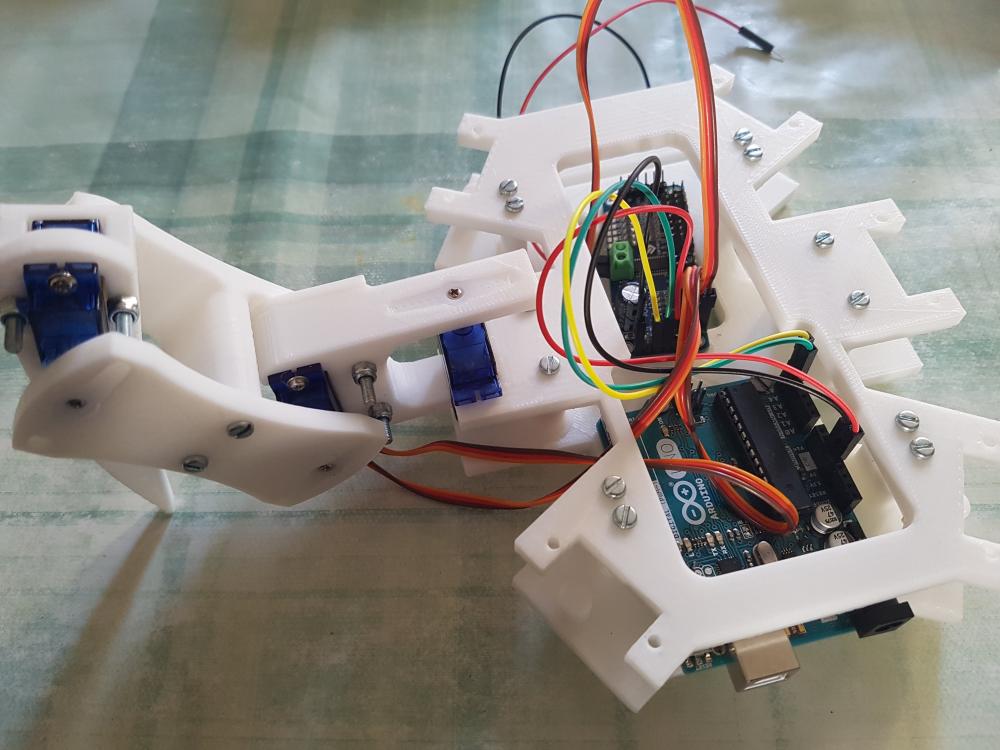
Bonjour à tous, Je voulais vous partager mon premier projet avec la SmartCub3D. Il s'agit d'un hexapode fait maison de la conception à la programmation. Ce projet est en cours, mais j'avance pas mal en ce moment. Conception : Pas mal d'allé-retours entre la conception et l'impression puis les premiers tests. Voici ce que ça donne, il ne me reste plus qu'à faire la symétrie sur les 3 autres pattes. 2. Architecture Arduino uno avec deux PCA9685 sur I2C. Une pile 9V pour l'arduino et une lipo 2S avec convertisseur pour les 18 servos. Je suis parti sur du low cost pour les servos : SG90. 3. Impression : Pour une patte : 3 heure à 15% de remplissage. 4. Avancement : En parallèle, j'attaque la programmation. Au début il sera pilotable par joystick (je n'ai pas encore conçu la télécommande, les premiers test se feront sur breadboard). Puis par smartphone et enfin autonome avec un tas de capteurs J'espère pouvoir éditer ce sujet plus tard pour le mettre à jour, si cela vous intéresse. Voilou A plus Krock


-
Je viens de voir la vidéo démo du dernier robot de BD, je suis sur le c*l : Leurs quadrupèdes étaient déjà impressionnant mais ça l'es encore plus pour un bipède. C'est fascinant de voir les réactions hyper naturelle qu'il a pour éviter la chute. J'imagine la vitesse de calcul que ça nécessite...