Donovan-88
-
Compteur de contenus
1 321 -
Inscrit(e) le
-
Dernière visite
2 abonnés

Visiteurs récents du profil
.thumb.jpg.8e4f3c7962529d5b54999ca8667a07c0.jpg)




Récompenses de Donovan-88
")





-
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Voici une autre vidéo pour tester la force : -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Bonjour, La force du bras va en partie dépendre de la puissance des différents moteurs. Surtout ceux utilisés pour le premier bras (Nema 23) Voici une vidéo avec 380 grammes Avec le bras à complètement à l'horizontal, j'ai un peut plus de 100 grammes avant que les moteurs du Bras n°1 ne décrochent. Mais sur mon robot, ce sont des petits Nema 23. Avec de plus gros modèles, je pense qu'on peut aisément porter plus. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Pour le moment, pas de jeu. La vis est maintenu avec un petit serrage. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
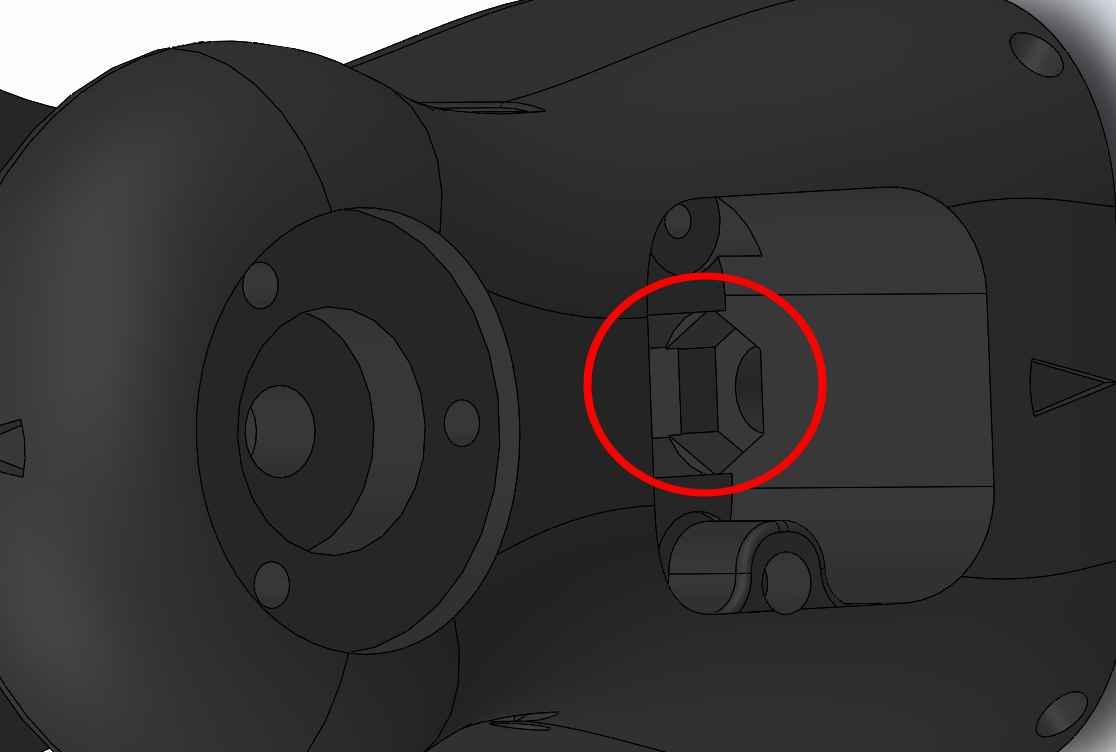
La tête de vis est maintenu grâce à la forme modélisée directement dans la pièce.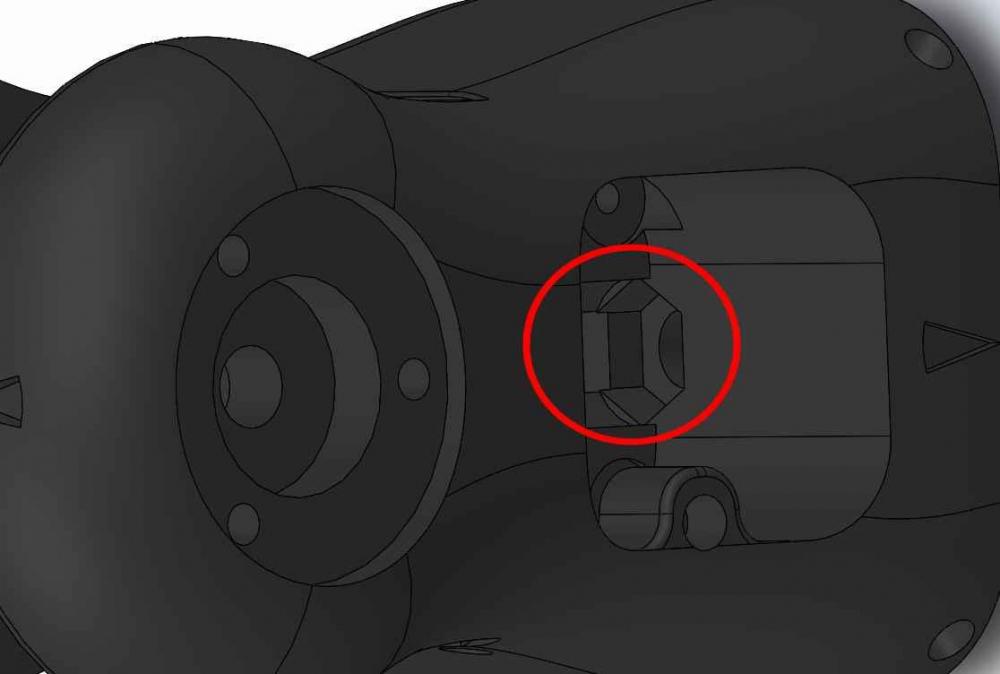
-
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
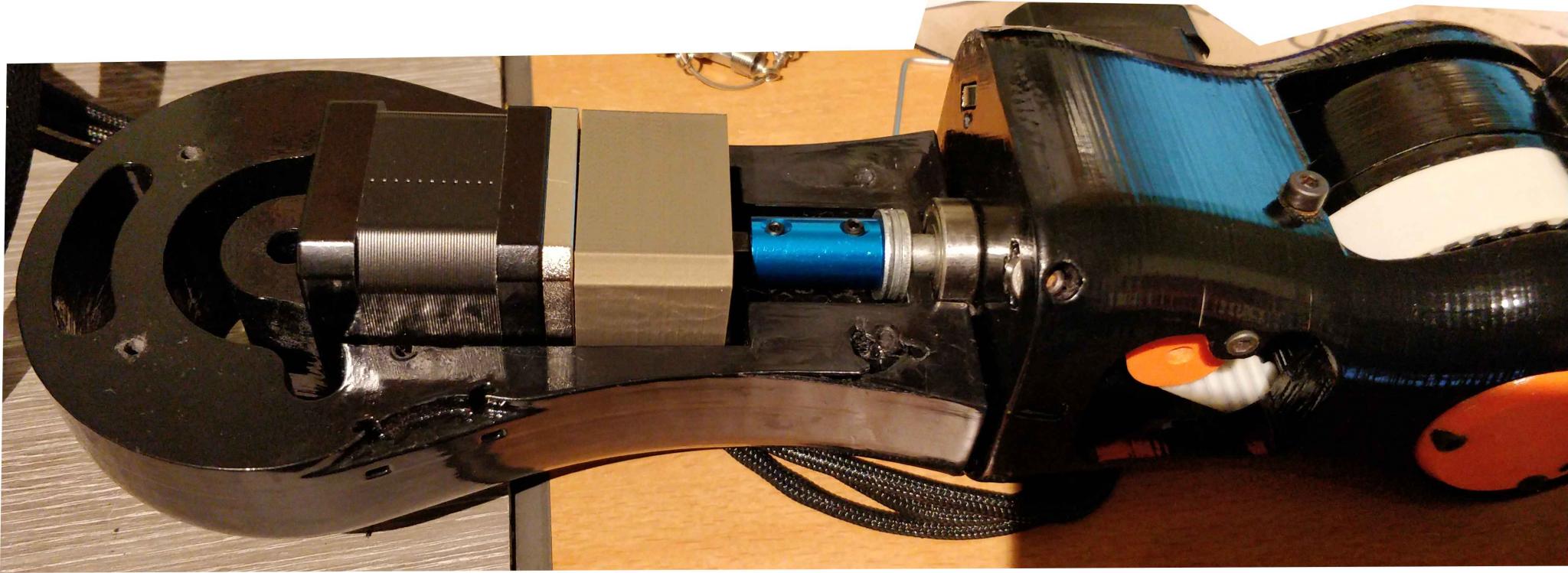
Pour le Bras 3, tu parles de la partie à droite (de la pièce bleu) de cette photo? Ou de la partie avec la pince?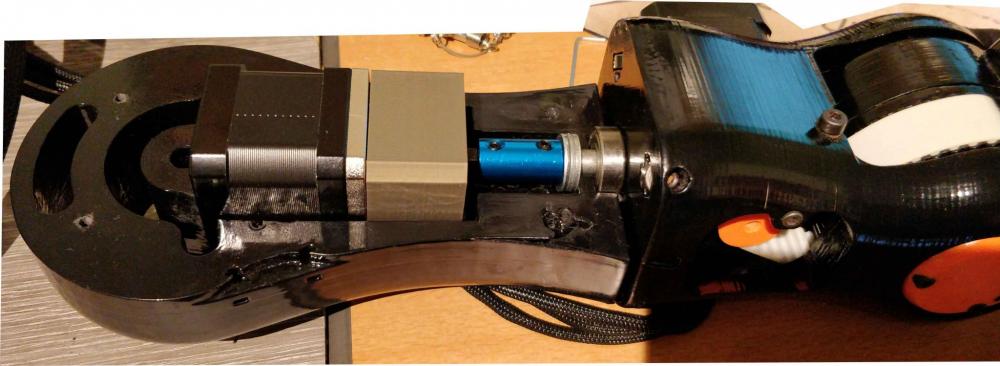
-
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
L'axe de 8mm est en réalité une vis M8 coupée. La tête de la vis est encastrée dans la pièce. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
C'est a peut près à quoi ressemble ma pièce après un usinage manuel. Avec des courroies en caoutchouc, tu n'as pas peur qu'elles soient élastiques sous la contrainte? -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Vraiment propre comme montage. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
A la longue elle gardera la forme. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
A oui sympa la valise. Bonne idée le voltmètre et ampérmètre. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Poste ici si tu veux, ça fera vivre le sujet. On pourra comparer comme ça. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
#include <AccelStepper.h> const int enablePin = 8; //activer les moteurs du CNC Shield // Define a stepper and the pins it will use AccelStepper stepper_bras2(1,3,6); void setup() { stepper_bras2.setMaxSpeed(2000.0); stepper_bras2.setAcceleration(8000.0); } void loop() { stepper_bras2.runToNewPosition(6000); stepper_bras2.runToNewPosition(0); stepper_bras2.runToNewPosition(-6000); stepper_bras2.runToNewPosition(0); } Pour tester mes moteurs j'utilisais ce petit bout de code. Essayes avec la fonction "runToNewPosition" ou juste "run". -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Mon moteur-réducteur n'est même plus accroché. Il est parfaitement maintenue dans son logement avec le serrage des deux parties du bras. Regarde la doc d'AccelStepper tu devrais pouvoir mieux comprendre. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Salut, merci J'ai découpé manuellement après l'impression les pièces. Car entre temps j'avais essayé un autre réducteur mais imprimé en 3D. -
[ROBOTIQUE] Bras robot BCN3D Moveo
Donovan-88 en réponse au topic de Donovan-88 dans Projets et impressions 3D
Après une longue attente du moteur, le voici : J'ai imprimé un adaptateur pour qu'il soit bien calé dans le bras Mise en place dans le bras avec le coupleur 8mm-->8mm