NJ_85
-
Compteur de contenus
8 -
Inscrit(e) le
-
Dernière visite
Récompenses de NJ_85
")




-
Calibration Input Shaping avec Marlin 2.1.2
NJ_85 en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
J'ai testé avec : Vitesse Périmètres externes: 120mm/s le reste par défaut Accélération Périmètres: 2500 mm/s² Remplissage: 2500 mm/s² Le reste par défaut Pour les limites j'avais tout mis à 0. je suis repasser sur des valeurs non nulles (en partant de celles d'origines) et avec ça j'arrive à faire l'impression sans problème : Tu crois que sans les limites ça peut fausser le test ?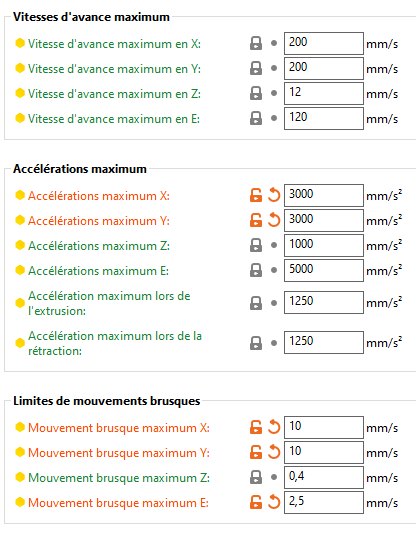
-
Calibration Input Shaping avec Marlin 2.1.2
NJ_85 en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Salut @MrMagounet, Merci encore pour ces tutos nous permettant d'améliorer nos imprimantes ! J'ai du me planter mais j'ai essayé de faire le test avec ma Genius Pro (passée sous le firmware 2.1.2). J'ai bien suivi le paramétrage sur PrusaSlicer, mais quand je lance l'impression, à chaque mouvement de la tête hors pièce, j'ai une vibration très importante des axes X et Y. (je tiens à préciser que tout fonctionne correctement sur l'imprimante autrement). Je me suis arrêté avant la fin de la première couche. Qu'est ce qui peux créer cette vibration ? Faut il que je réactive certaine limites d'accélération ou jerk ? Je vais essayer de faire d'autres tests mais si tu as une idée je suis preneur ! Ps : je met mon fichier gcode et projet prusa en pièce jointe si ça peut aider Merci d'avance ! ringing_tower_0.2mm_PLA_Genius_31m.gcode ringing_tower.3mf -
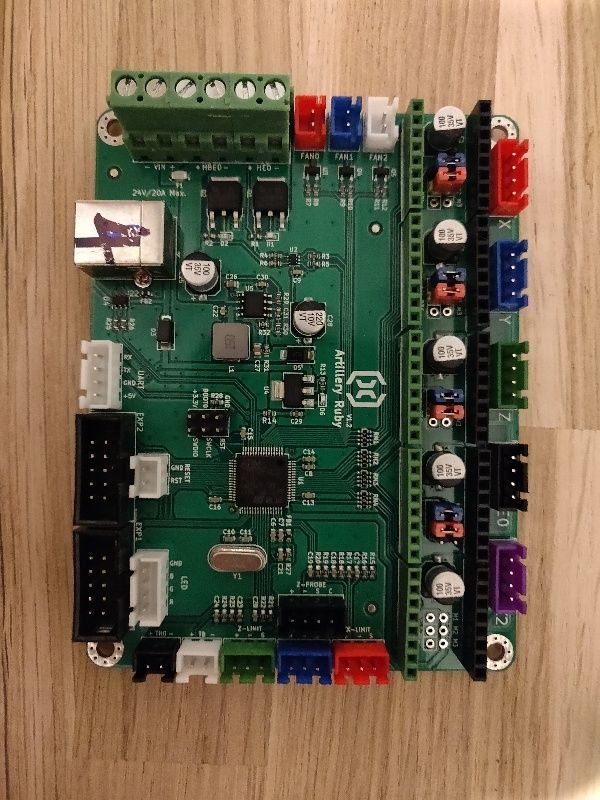
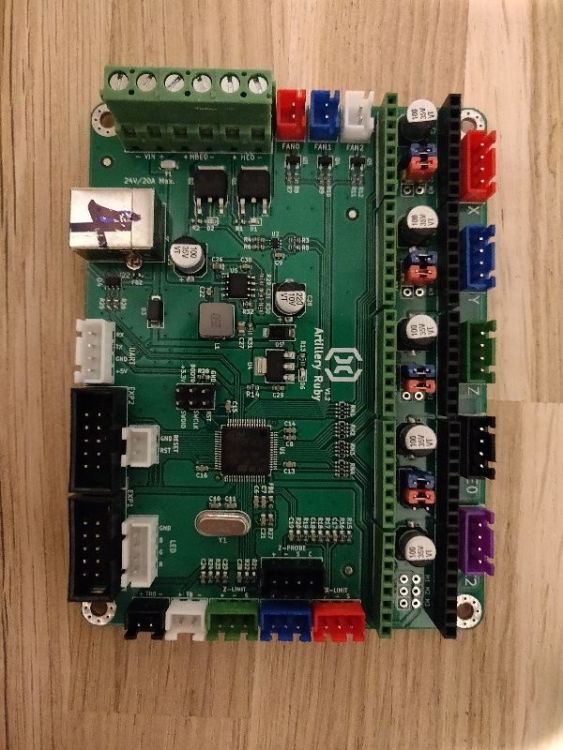
Bonsoir, Ça y est, ça marche super ! J'ai acheté un kit avec des pin et jumper sur Amazon : https://www.amazon.fr/dp/B0868LJDW1/ref=cm_sw_r_apan_glt_i_0ZG7W2SE2S9M9PWCQVZW?_encoding=UTF8&psc=1 J'ai soudé les pins sur la CM puis j'ai mis des cavaliers sur ms1 et ms2 : voir photo. Maintenant ça marche très bien, j'ai pu faire un home, bed leveling et une impression de test. L'imprimante est vraiment plus silencieuse. Sur des mouvements lents c'est impressionnant ! Je n'ai pas remodifier le firmware, par rapport à celui de @MrMagounetj'ai juste inversé le sens de rotation et déclaré des TMC2208_standalone. Donc pour faire fonctionner des TMC2208 sur une carte Artillery Ruby, vous savez ce qu'il faut faire .
-
J'ai essayé les 2, je n'ai pas vu de différence... Actuellement je suis en TMC2208_standalone En TMC2208 tout court ça ne veut pas compiler.
-
Bonjour à tous, J'essaie également de remplacer les driver par des TMC2208 sur ma genius pro (équivalent X2). Ce que j'ai fait : Remplacement tel quel des drivers sur la carte ==> les moteurs bougent à l'envers Inversion du sens de rotation des moteurs dans le firmware ==> ok, mais le déplacement des moteurs n'est pas bon : les axes bougent 2 fois plus que ce qu'on leur demande. Suite aux explications de @MrMagounet, test en mode bricolage de mise en place de ponts sur la carte mère sur MS1 et Ms2 (sur l'axe X uniquement) ==> ça fonctionne, l'axe se déplace de 10 MM pour 10mm de consigne. La question maintenant c'est faut il faire ces ponts proprement sur toute la carte (ça nécessite un peu de soudure), ou y'a t-il moyen de générer un firmware qui corrige le problème ?
-
[Tuto] Comment Flasher le Firmware des X2 / Genius Pro / Hornet
NJ_85 en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Pour ne pas trop charger ce post, je propose de continuer sur ce sujet directement dans le post de @titalight Ici. -
[Tuto] Comment Flasher le Firmware des X2 / Genius Pro / Hornet
NJ_85 en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Merci pour le retour. Dans ce cas ne faut il pas souder des cavaliers sur ms1 et ms2 ? Je vais essayer de faire le test. Est ce que avec ta version de firmware pour X2 avec TMC2208 ça fonctionne ? Edit : Je viens de faire le test en bricolant des ponts pour MS1 et MS2 (testé sur l'axe X uniquement) et ainsi ça fonctionne ! Le déplacement de mon axe X est correcte, 10 mm d'incrément = 10 mm de déplacement. Avec cette info, qu'en penses tu : vaut il mieux faire les ponts pour les 4 axes ou y'a t'il moyen de modifier la config dans marlin pour faire de même ? Merci d'avance de ton retour. -
[Tuto] Comment Flasher le Firmware des X2 / Genius Pro / Hornet
NJ_85 en réponse au topic de MrMagounet dans Tutoriels et améliorations pour Artillery
Bonjour à tous. Je débute dans le flash de Firmware Marlin sur Genius Pro. J'ai réussi à mettre en place une première version du firmware + TFT. Ca marche super et j'aimerais d'ailleurs remercier @MrMagounet pour tout ce travail ! Je souhaiterais maintenant mettre en place des TMC 2208 pour rendre encore plus silencieuse l'imprimante. Le problème c'est que maintenant les axes se déplacent 2 fois plus que prévu (un incrément de 10mm entraine un déplacement de 20mm). J'imagine qu'il y a quelques paramètres à modifier dans le firmware mais je n'arrive pas à savoir lesquels. De plus, j'ai vu qu'une version du firmware avec TMC2208 est sortie pour la X2, mais est ce compatible avec la Genius ? Est ce que quelqu'un saurait m'indiquer les paramètres à changer dans le firmware ? (je souhaite utiliser les TMC2208 si possible sans avoir à faire de soudure dessus). En vous remerciant d'avance de votre soutient.