



Philippe4568
-
Compteur de contenus
12 -
Inscrit(e) le
-
Dernière visite
Récompenses de Philippe4568
")





-
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Alors, c'est bon tout mes moteurs tournent mais ils ne parcourent pas la bonne distance ... -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Bonsoir ! Je suis avec l'imprimante 3D et j'ai paramétré les axes X et Y mais ils ne font pas la distance totale. Quand à l'axe Z, il ne bouge même pas, il fais un bruit d'enfer ... Merci -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Bonjour ! J'ai donc recompté mon nombre de dents sur les poulies et je suis donc tombé sur 16 ... Donc mon nombre de pas par mm à paramétrer dans Marlin sera donc de : #define DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, 4000, 500 } Téléversé et exécuté sur la RepRap, j'ai paramétré mes drivers Pololu avec une valeurs de environ 0.48 V sur les drivers X et Y, et en ce qui concerne mon drivers pour mes deux moteurs Z, je l'ai réglé sur le double 0.96 V. (En effet il fond un meilleurs bruit ) J’obtiens donc un déplacement de 1mm sur l'axe X et Y avec une commande 100 mm. En ce qui concerne l'axe Z, il se déplace donc de 13 mm avec une commande de 10 mm. J'ai peut être trouvé mon problème, il s'avère que j'ai des Drivers Pololu A4988 et que j'ai utilisé des jumpers seulement sur la broche MS3. En étudiant la documentation de mon composant j'ai le tableau : En ayant ponté cette broche je ne suis pas à 1/16 mais a je sais pas quoi Ce soir je testerais avec la configuration de toutes les broches connectées et je ferais suite a ce post.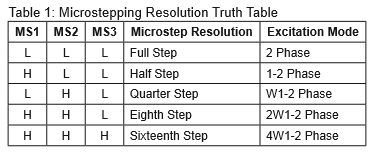
-
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Je regarderais ça demain, je ferais une mise a jour de ce sujet demain quand j'aurais testé tout ca ^^ En tout cas pour le moment merci -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
driver mal réglé - J'ai suivi le tuto donné par pololu direction des moteurs mal réglé Testé branchement mauvais Testé sur un module externe firmware mal configuré - Suivi la configuration donné sur des tuto youtube (mais je n'étais pas sur de cette configuration de Step per mm) courroie pas assez tendu C'est tendu comme une corde de guitare ^^ poullie pas serré Je peut pas plus la serrée Après mon centre d'imprimante n'est pas fais correctement, j'ai 70 mm de décalage sur l'axe Y et 25 mm sur l'axe X -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
J'ai pas l'imprimante sous la main, je peut te dire ça demain Mais ça pourrais être due a quoi ? -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Alors si je demande a Repetier d'avancer de 50 mm le bed n'avance même pas de 1 cm. De même pour l'axe Y Par contre l'axe Z, j'ai l'impression que la distance est respecté. -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Ouai du coup j'ai pu les réglés comme il faut ^^ avec le petit potentiomètre sur mes drivers. -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Oui Oui c'est bon. Maintenant je m'appercois que les moteurs pas a pas font un meilleurs bruit ^^ Mais ils ne parcourent toujours pas la distance. -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
Ouep ça dois donc être 16 dents alors ... mais ça résous pas mon problème de déplacement ... -
aneta8 Problème dimensions de l'imprimante
Philippe4568 en réponse au topic de Philippe4568 dans RepRap
J'ai surment loupé ce calcul là oui Mais je viens de réessayer avec les bonnes valeurs mais ça va pas plus loin ... En ce qui concerne le nombre de dents sur ma poulie ... j'ai acheté ça aussi sur internet et c'étais marqué 17 ... Je vais donc recompter le nombre de dents Avec 16 dents sur une poulie ça fais quoi ? -
Bonsoir à tous ! Je fais appel à la communautés des imprimeurs 3D car je suis complètement perdu dans mon projet. J'ai acheté une imprimante 3D en kit sur un site chinois (Bangood : https://www.banggood.com/fr/Anet-A8-3D-Printer-DIY-Kit-1_75mm-0_4mm-Support-ABS-PLA-HIPS-p-1130694.html?cur_warehouse=CN) J'ai trouvé que le volume d'impression étais assez restrinct du coup j'ai décidé d'agrandir cette surface en créant un nouveau support et un nouveau "BED" chauffant. J'ai donc déporté mes moteurs X,Y et mes 2 Z. Acheté deux nouvelles courroies plus grandes et deux vis sans fin pour les deux axes Z. En ce qui conscerne la partie hardware la, la manipulation se complexifie. Maintenant j'ai un volume d'impression de 30x30x35 La carte vendue avec le kit ( https://sc01.alicdn.com/kf/HTB1uQKnRXXXXXbGaXXXq6xXFXXX7/2017-Anet-3D-Printer-Control-Part-Motherboard.jpg_350x350.jpg) La carte que j'ai acheté (http://reprap.org/wiki/RAMPS_1.4/fr) avec en plus une carte Arduino Mega. Pourquoi avoir acheté une nouvelle carte me direz vous ? ... Il n'y a aucune documentation avec la première ... Voila j'ai donc listé mon matériel ( pour plus de détails, vois a la fin). Mon problème est le suivant : Lorsque je lance Repetier-Host et que je pilote mes axes X et Y (les moteurs tournent) mais la commande que j'envoie à Repetier ne corresponds pas a la distance parcourue ... Alors que la commande de mon axe Z fonctionne parfaitement. J'ai un doute sur le calcul de mes pas/mm (j'ai utilisé le calculateur inclus dans repetier). J'ai aussi un doute sur la dimension que je déclare dans la configuration de la surface d'impression. Et mon dernier doute tombe sur le programmation de Marlin (que j'utilise en tant que software). J'ai beau tourner le problème dans tout les sens je ne sais pas ce que j'ai fais de mal. Je vous met un lien qui renvoie sur mon drive ou se trouvent les capture d’écran de la configuration de Repetier et de Marlin. Images (https://drive.google.com/drive/folders/1kjOa4wwf1LkXtVRCZ0zx16N3hi6ydTv0?usp=sharing) En ce qui concerne les caractéristiques : Moteur : 42SHDC3025-24B (axes X, Y, Z) Rotation par pas : 1.8° Pas par revolutions : 200 Microstep (réglé sur ma RepRap) : 1/16 Nombre de dents en sortie : 17 Courroies (espace entre chaque dents : 2 mm) Vis sans fin : (espace entre chaque dents : 1 mm) Mercie de votre réponse !