Chercher dans la communauté
Résultats des étiquettes.
-
 Bonjour a tous je suis novice pour la transformation modification d'une Imprimante 3D. j'ai une Anicubic i3 mega qui fonctionnais bien jusque à un court-circuit dans la connection à la tête qui à grillé ma carte mère j'ai tenté de la réparé changement de deux transistor puis une diode et j'ai vu fumé le microprocesseur donc STOP! on achète une carte mes plus moyen de trouvé cette carte du coup quitte à changer, j'ai pris une Robin Nano v3.1. J'y ai ajouté un 3DTouch et deux moteur pas à pas pour deux couleur, j'ai cinq driver TCM 2209 trois en HART pour axe X, Y, Z et en STEP pour les Extrudeurs des deux filament et créé le circuit imprimé de connexion dans la tête pour n'avoir que une fiche de 16 pin pour le touts 3DTouch ventilo et chauffe de la tête, et idem pour le circuit de connexion une autre en sortie de 16 pin et deux de sortie pour chaque moteur d'extrudeur pas à pas des filament, deux mosfet un pour Bed et Un pour chauffe de la buse, voilà travail fini j'e teste de démarré le tous tout fonctionne avec le frimware déjà pré installé. Voilà quelque photos du travaille avent d'aller plus Loing pour faire un Y pour l'entré les deux couleur de filament. Donc je passe à la suite installation de marlin 2.0.9.2 après quelque lecture et vidéo pour comprendre comment je dois faire je suis les procédure. Les deux première compilation se passent bien mais les moteur dans le m'mauvais cense arrêt de l'impriment avec mon doit toujours sur l'interrupteur quand je veux tester la partie 3Dtouch car l'axe X pare dans l'autre cense pas envie de cassé la courroie, vous comprenez, j'en ai pas de réserve . Je fais deux compile remet la clef USB et démarrage installe finie toujours pareille, donc je retourne sur Virtual studio code et puis tentative de compile plus moyen j'ai une erreur et là je suis bloqué donc je viens vers vous pour comprendre j'ai testé plusieurs chose y compris désinstallation complète de tous les logiciel mes rein ne va, j'ai mème retéléchargement dtout les dossier pour le du frimware sur le site et rein n'y fait j'ai toujour le mème problème surement un truc que j'ai changer sant le vouoire, voici l’erreur que je trouve. PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> platformio run --silent -e mks_robin_nano_v3 Warning! Ignore unknown configuration option `monitor_flags` in section [env] Warning! `src_filter` configuration option in section [env:include_tree] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:DUE] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:esp32] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_build_flags` configuration option in section [env:linux_native] is deprecated and will be removed in the next release! Please use `build_src_flags` instead Warning! `src_filter` configuration option in section [env:linux_native] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_build_flags` configuration option in section [env:simulator_windows] is deprecated and will be removed in the next release! Please use `build_src_flags` instead Warning! `src_filter` configuration option in section [env:SAMD51_grandcentral_m4] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:malyan_M300] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:STM32F103CB_malyan] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy31] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy35] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy36] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy41] is deprecated and will be removed in the next release! Please use `build_src_filter` instead In file included from buildroot/share/PlatformIO/scripts/../../../../Marlin/src/inc/MarlinConfig.h:28, from buildroot/share/PlatformIO/scripts/common-dependencies.h:29: buildroot/share/PlatformIO/scripts/../../../../Marlin/src/inc/MarlinConfigPre.h:56:10: fatal error: ../../Configuration_adv.h: No such file or directory 56 | #include "../../Configuration_adv.h" | ^~~~~~~~~~~~~~~~~~~~~~~~~~~ compilation terminated. CalledProcessError: Command '"C:\Users\brefa\.platformio\packages\toolchain-gccarmnoneeabi\bin\arm-none-eabi-g++.exe" -D__MARLIN_FIRMWARE__ -DNDEBUG -DHAL_STM32 -DUSBCON -DUSBD_USE_CDC -DTIM_IRQ_PRIO=13 -DPIN_WIRE_SCL=PB6 -DPIN_WIRE_SDA=PB7 -DHAL_PCD_MODULE_ENABLED -D__MARLIN_DEPS__ -w -dM -E -x c++ buildroot/share/PlatformIO/scripts/common-dependencies.h' returned non-zero exit status 1.: File "C:\Users\brefa\.platformio\penv\Lib\site-packages\platformio\builder\main.py", line 167: env.SConscript(env.GetExtraScripts("pre"), exports="env") File "C:\Users\brefa\.platformio\packages\tool-scons\scons-local-4.8.1\SCons\Script\SConscript.py", line 620: return _SConscript(self.fs, *files, **subst_kw) File "C:\Users\brefa\.platformio\packages\tool-scons\scons-local-4.8.1\SCons\Script\SConscript.py", line 280: exec(compile(scriptdata, scriptname, 'exec'), call_stack[-1].globals) File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 317: apply_features_config() File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 136: if not env.MarlinFeatureIsEnabled(feature): File "C:\Users\brefa\.platformio\packages\tool-scons\scons-local-4.8.1\SCons\Util\envs.py", line 252: return self.method(*nargs, **kwargs) File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 293: load_marlin_features() File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 281: define_list = subprocess.check_output(cmd, shell=True).splitlines() File "C:\Users\brefa\.platformio\python3\Lib\subprocess.py", line 466: return run(*popenargs, stdout=PIPE, timeout=timeout, check=True, File "C:\Users\brefa\.platformio\python3\Lib\subprocess.py", line 571: raise CalledProcessError(retcode, process.args, ================================================================================== [FAILED] Took 0.71 seconds ================================================================================== Environment Status Duration ----------------- -------- ------------ mks_robin_nano_v3 FAILED 00:00:00.714 ============================================================================ 1 failed, 0 succeeded in 00:00:00.714 ============================================================================ PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> echo "done" >"C:\Users\brefa\AppData\Local\Temp\ipc" PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> ^C PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> Merci pour laide que vous m'apporterez j'ai aussi joint les fichier.Configuration.hConfiguration_adv.h le chemain lme semble bon dans ce ficher MarlinConfigPre.h
Bonjour a tous je suis novice pour la transformation modification d'une Imprimante 3D. j'ai une Anicubic i3 mega qui fonctionnais bien jusque à un court-circuit dans la connection à la tête qui à grillé ma carte mère j'ai tenté de la réparé changement de deux transistor puis une diode et j'ai vu fumé le microprocesseur donc STOP! on achète une carte mes plus moyen de trouvé cette carte du coup quitte à changer, j'ai pris une Robin Nano v3.1. J'y ai ajouté un 3DTouch et deux moteur pas à pas pour deux couleur, j'ai cinq driver TCM 2209 trois en HART pour axe X, Y, Z et en STEP pour les Extrudeurs des deux filament et créé le circuit imprimé de connexion dans la tête pour n'avoir que une fiche de 16 pin pour le touts 3DTouch ventilo et chauffe de la tête, et idem pour le circuit de connexion une autre en sortie de 16 pin et deux de sortie pour chaque moteur d'extrudeur pas à pas des filament, deux mosfet un pour Bed et Un pour chauffe de la buse, voilà travail fini j'e teste de démarré le tous tout fonctionne avec le frimware déjà pré installé. Voilà quelque photos du travaille avent d'aller plus Loing pour faire un Y pour l'entré les deux couleur de filament. Donc je passe à la suite installation de marlin 2.0.9.2 après quelque lecture et vidéo pour comprendre comment je dois faire je suis les procédure. Les deux première compilation se passent bien mais les moteur dans le m'mauvais cense arrêt de l'impriment avec mon doit toujours sur l'interrupteur quand je veux tester la partie 3Dtouch car l'axe X pare dans l'autre cense pas envie de cassé la courroie, vous comprenez, j'en ai pas de réserve . Je fais deux compile remet la clef USB et démarrage installe finie toujours pareille, donc je retourne sur Virtual studio code et puis tentative de compile plus moyen j'ai une erreur et là je suis bloqué donc je viens vers vous pour comprendre j'ai testé plusieurs chose y compris désinstallation complète de tous les logiciel mes rein ne va, j'ai mème retéléchargement dtout les dossier pour le du frimware sur le site et rein n'y fait j'ai toujour le mème problème surement un truc que j'ai changer sant le vouoire, voici l’erreur que je trouve. PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> platformio run --silent -e mks_robin_nano_v3 Warning! Ignore unknown configuration option `monitor_flags` in section [env] Warning! `src_filter` configuration option in section [env:include_tree] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:DUE] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:esp32] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_build_flags` configuration option in section [env:linux_native] is deprecated and will be removed in the next release! Please use `build_src_flags` instead Warning! `src_filter` configuration option in section [env:linux_native] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_build_flags` configuration option in section [env:simulator_windows] is deprecated and will be removed in the next release! Please use `build_src_flags` instead Warning! `src_filter` configuration option in section [env:SAMD51_grandcentral_m4] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:malyan_M300] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:STM32F103CB_malyan] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy31] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy35] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy36] is deprecated and will be removed in the next release! Please use `build_src_filter` instead Warning! `src_filter` configuration option in section [env:teensy41] is deprecated and will be removed in the next release! Please use `build_src_filter` instead In file included from buildroot/share/PlatformIO/scripts/../../../../Marlin/src/inc/MarlinConfig.h:28, from buildroot/share/PlatformIO/scripts/common-dependencies.h:29: buildroot/share/PlatformIO/scripts/../../../../Marlin/src/inc/MarlinConfigPre.h:56:10: fatal error: ../../Configuration_adv.h: No such file or directory 56 | #include "../../Configuration_adv.h" | ^~~~~~~~~~~~~~~~~~~~~~~~~~~ compilation terminated. CalledProcessError: Command '"C:\Users\brefa\.platformio\packages\toolchain-gccarmnoneeabi\bin\arm-none-eabi-g++.exe" -D__MARLIN_FIRMWARE__ -DNDEBUG -DHAL_STM32 -DUSBCON -DUSBD_USE_CDC -DTIM_IRQ_PRIO=13 -DPIN_WIRE_SCL=PB6 -DPIN_WIRE_SDA=PB7 -DHAL_PCD_MODULE_ENABLED -D__MARLIN_DEPS__ -w -dM -E -x c++ buildroot/share/PlatformIO/scripts/common-dependencies.h' returned non-zero exit status 1.: File "C:\Users\brefa\.platformio\penv\Lib\site-packages\platformio\builder\main.py", line 167: env.SConscript(env.GetExtraScripts("pre"), exports="env") File "C:\Users\brefa\.platformio\packages\tool-scons\scons-local-4.8.1\SCons\Script\SConscript.py", line 620: return _SConscript(self.fs, *files, **subst_kw) File "C:\Users\brefa\.platformio\packages\tool-scons\scons-local-4.8.1\SCons\Script\SConscript.py", line 280: exec(compile(scriptdata, scriptname, 'exec'), call_stack[-1].globals) File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 317: apply_features_config() File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 136: if not env.MarlinFeatureIsEnabled(feature): File "C:\Users\brefa\.platformio\packages\tool-scons\scons-local-4.8.1\SCons\Util\envs.py", line 252: return self.method(*nargs, **kwargs) File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 293: load_marlin_features() File "C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master\buildroot\share\PlatformIO\scripts\common-dependencies.py", line 281: define_list = subprocess.check_output(cmd, shell=True).splitlines() File "C:\Users\brefa\.platformio\python3\Lib\subprocess.py", line 466: return run(*popenargs, stdout=PIPE, timeout=timeout, check=True, File "C:\Users\brefa\.platformio\python3\Lib\subprocess.py", line 571: raise CalledProcessError(retcode, process.args, ================================================================================== [FAILED] Took 0.71 seconds ================================================================================== Environment Status Duration ----------------- -------- ------------ mks_robin_nano_v3 FAILED 00:00:00.714 ============================================================================ 1 failed, 0 succeeded in 00:00:00.714 ============================================================================ PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> echo "done" >"C:\Users\brefa\AppData\Local\Temp\ipc" PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> ^C PS C:\Users\brefa\Documents\3D Impression\tenté de comprendre la panne et réparé par ligne de com\téléchargement pour MKS Robin Nano V3.1\Mks-Robin-Nano-Marlin2.0-Firmware-master> Merci pour laide que vous m'apporterez j'ai aussi joint les fichier.Configuration.hConfiguration_adv.h le chemain lme semble bon dans ce ficher MarlinConfigPre.h
-
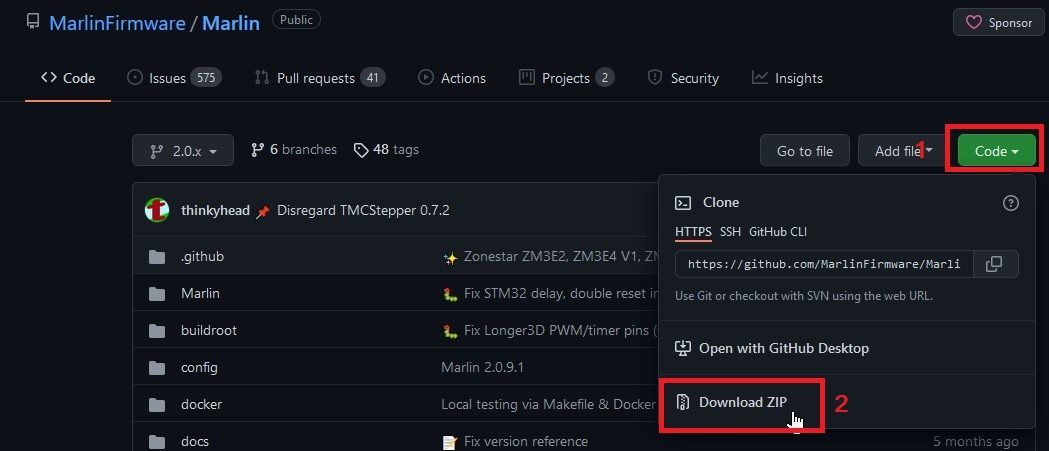
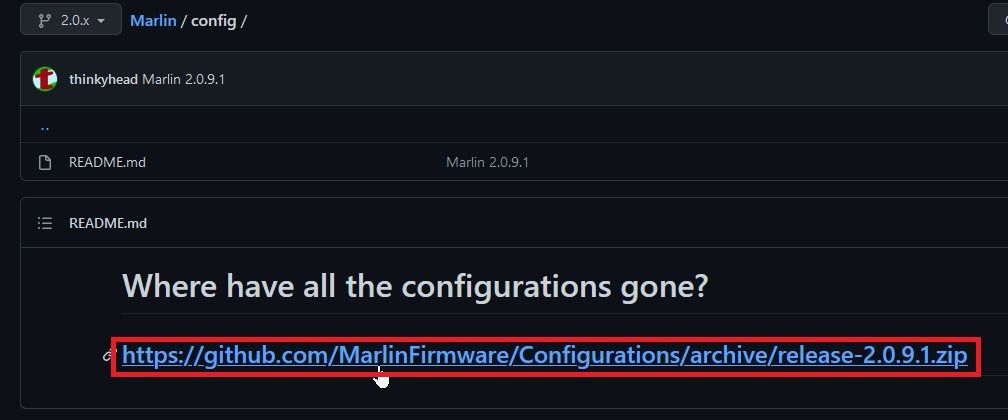
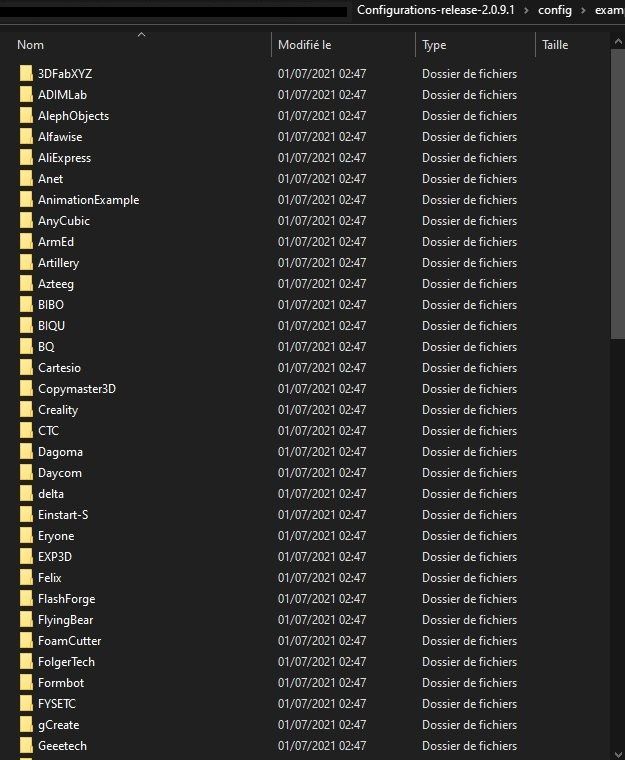
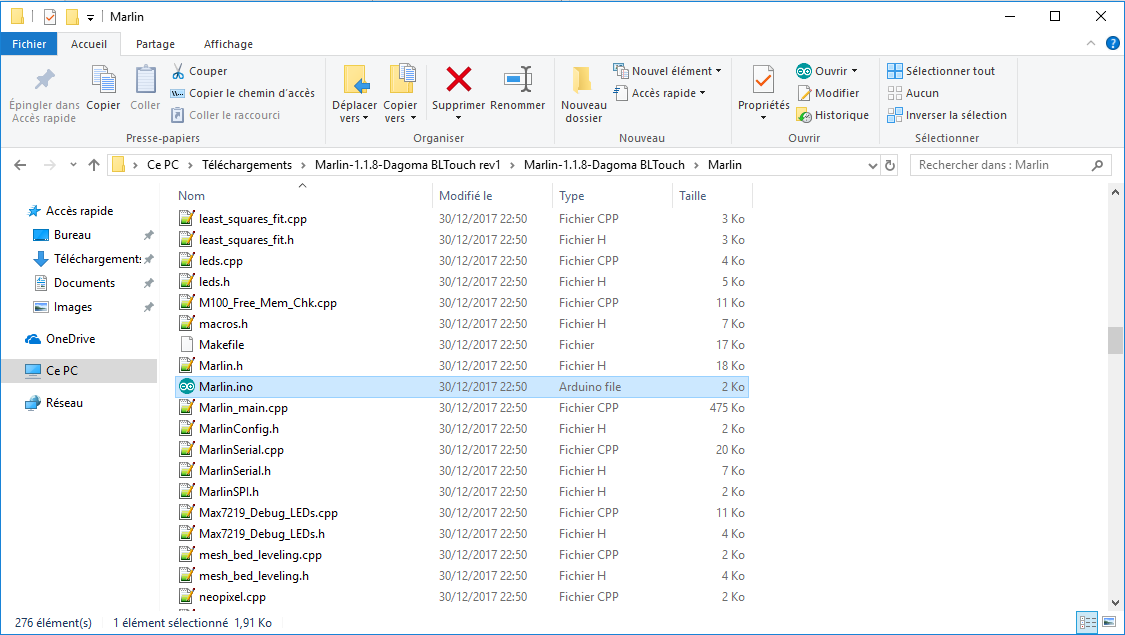
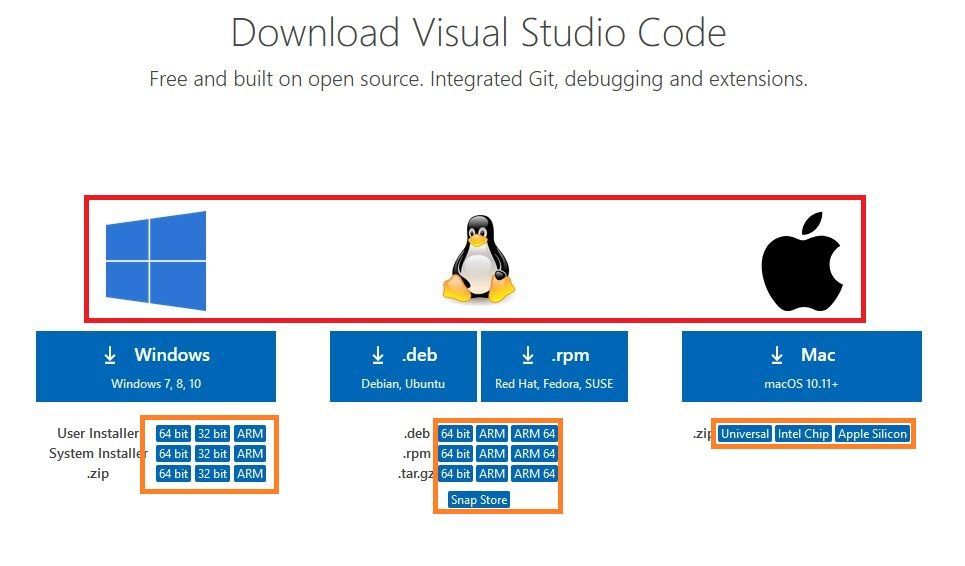
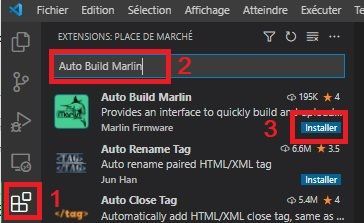
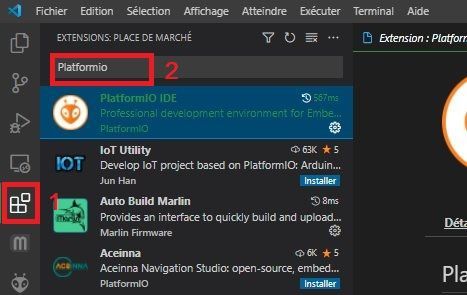
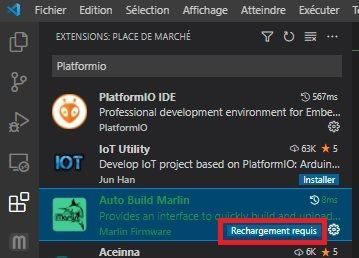
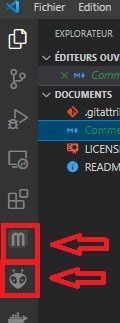
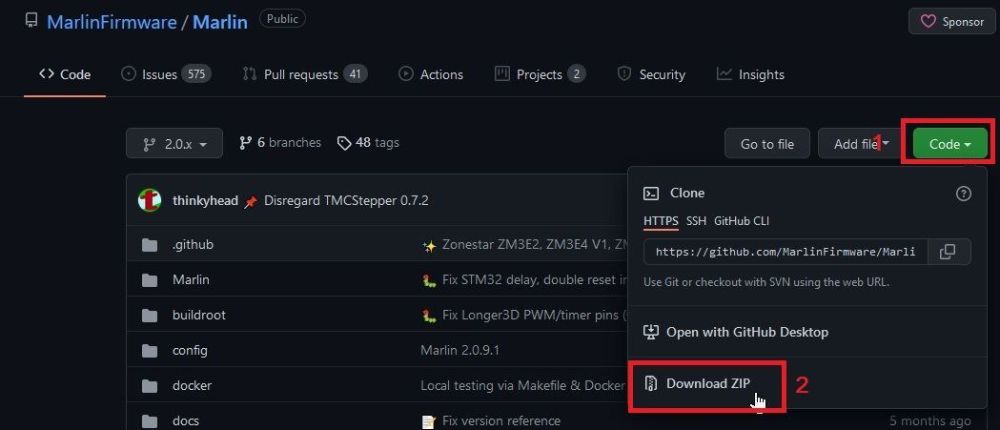
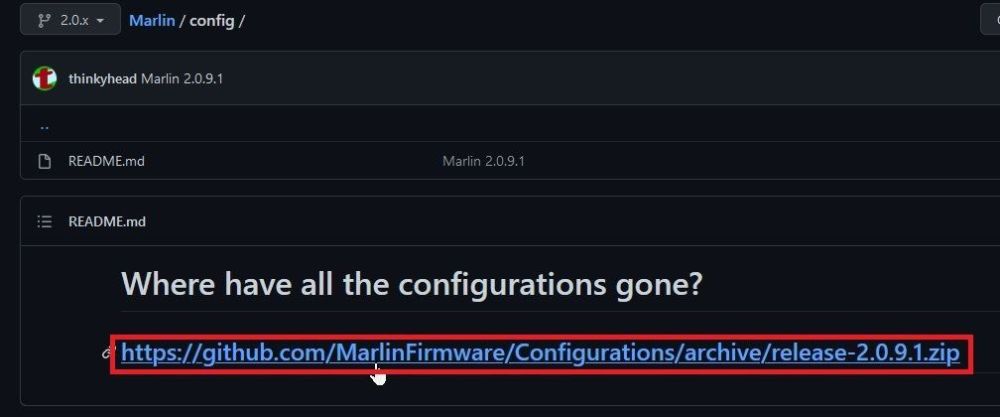
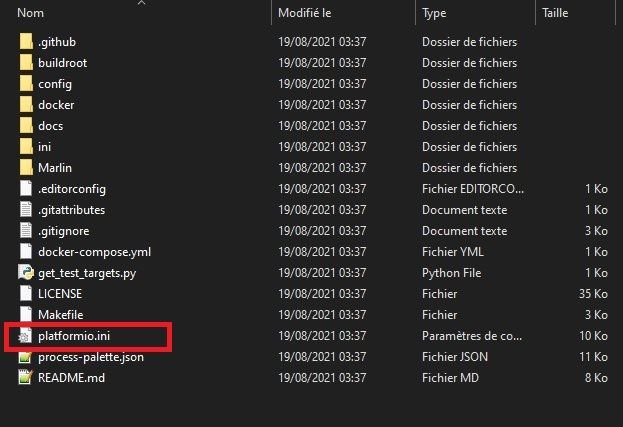
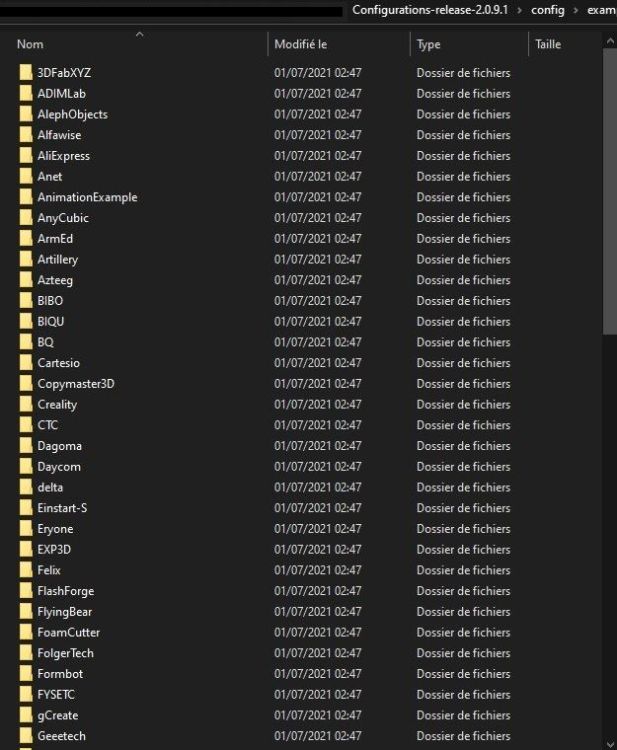
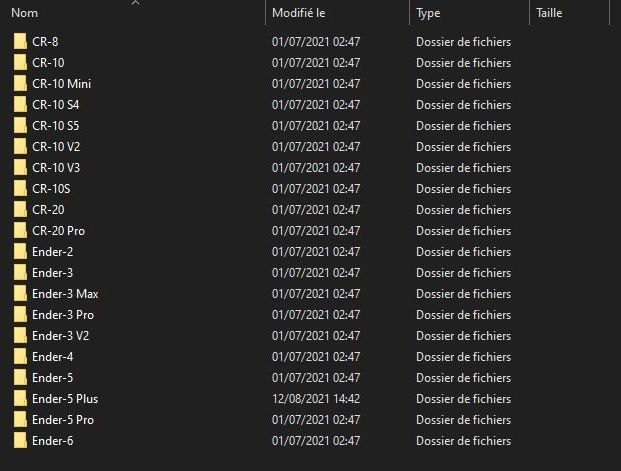
 Ce tutoriel s'adresse à ceux voulant faire leur propre firmware basé sur Marlin. Afin de faire son propre firmware, il est essentiel d'installer correctement son environnement de développement (chaine de compilation). Pour un Marlin, version 1, il était recommandé d'utiliser le logiciel Arduino pour faire les modifications des fichiers de configuration puis réaliser la compilation et éventuellement le flashage du firmware obtenu si l'imprimante était reliée à l'ordinateur via un câble USB. Depuis la version 2 de Marlin, l'environnement de travail préconisé est différent, même s'il reste possible de compiler son propre firmware avec un Marlin 2.x pour des cartes 8 bits avec l'environnement Arduino IDE. Ce que je décris par la suite est ma manière de travailler qui jusqu'à ce jour m'a permis de compiler de nombreux firmwares (pour mon propre usage ou pour celui d'autres membres de ce forum). Passons donc à l'installation des différents logiciels. Installer Git bash Télécharger et installer la version actuelle de Git en fonction de votre OS (Windows, Linux, Mac) Installer Python Télécharger et installer la version actuelle de Python en fonction de votre OS (Windows, Linux, Mac) Comment installer VSC et Auto Build Marlin + Platformio IDE pour compiler Télécharger Visual Studio Code (VSC) à partir d'ici Le choix dépend du système d'exploitation (OS) de l'ordinateur (Windows (7, 8, 10) / Linux / Mac) et de l'architecture (32 / 64bits). Après téléchargement, un double-clic pour lancer l'installation de VSC. Après installation, ouvrir VSCode. Il faudra ensuite installer l'extension «Auto Build Marlin», clic sur le ① indiqué dans l'image ci-dessous, saisir Auto Build Marlin (ABM) dans ② puis cliquer ③ Installer pour finaliser l'installation. Normalement, l'installation de «ABM» devrait avoir également installé en dépendance Platformio IDE. Si ce n'était pas le cas : Installer l'extension «Platformio IDE», comme pour ABM, clic sur le ① indiqué dans l'image ci-dessous, saisir Platformio IDE dans ② puis cliquer ③ Installer pour finaliser l'installation. Après installation de ces extensions, il faudra probablement effectuer un rechargement pour que ce soit pris en compte via Recharger Une fois ces installations réussies, après un nouveau rechargement, Auto Build Marlin et PlatformIO sont installés et apparaissent dans la liste des extensions (plugins) dans la partie gauche de VSCode. Un clic sur l'icône du plugin PlatformIO (①) (une tête de fourmi (certains y voient un «alien») pour le sélectionner, puis un dernier clic sur ② Ouvrir un projet (Open Project) pour ouvrir le projet et pouvoir commencer à travailler avec. Pour compiler un Marlin, il faut au préalable avoir récupéré les sources fournies sous forme d'une archive compressée Décompresser l'archive récupérée à l'issue du téléchargement, un dossier Marlin-2.0.x doit avoir été créé. C'est ce dossier qu'il faut indiquer lors de l'ouverture du projet via Platformio (le fichier platformio.ini doit y être ainsi qu'un dossier Marlin contenant les fichiers sources qui serviront lors de la compilation) Il est recommandé de récupérer les exemples de configuration d'imprimantes proposés par l'équipe du Marlin. Une fois cette archive décompressée, le dossier config/examples contient de nombreux constructeurs et modèles d'imprimantes Exemples du fabricant Creality : Pour une Creality Ender3, il n'y a que l'embarras du choix en fonction de la carte mère installée sur l'imprimante. Il suffira de recopier les fichiers configuration[_adv].h et éventuellement les [boot|status]screen.h dans le dossier nommé Marlin en remplacement de ceux originaux pour se faciliter les étapes liées au paramétrage avant de lancer la compilation Maintenant que l’environnement de travail est prêt, à vous de jouer Bonne(s) compilation(s) et que le filament coule à flot Ce tutoriel est également disponible sur mon dépôt Github
Ce tutoriel s'adresse à ceux voulant faire leur propre firmware basé sur Marlin. Afin de faire son propre firmware, il est essentiel d'installer correctement son environnement de développement (chaine de compilation). Pour un Marlin, version 1, il était recommandé d'utiliser le logiciel Arduino pour faire les modifications des fichiers de configuration puis réaliser la compilation et éventuellement le flashage du firmware obtenu si l'imprimante était reliée à l'ordinateur via un câble USB. Depuis la version 2 de Marlin, l'environnement de travail préconisé est différent, même s'il reste possible de compiler son propre firmware avec un Marlin 2.x pour des cartes 8 bits avec l'environnement Arduino IDE. Ce que je décris par la suite est ma manière de travailler qui jusqu'à ce jour m'a permis de compiler de nombreux firmwares (pour mon propre usage ou pour celui d'autres membres de ce forum). Passons donc à l'installation des différents logiciels. Installer Git bash Télécharger et installer la version actuelle de Git en fonction de votre OS (Windows, Linux, Mac) Installer Python Télécharger et installer la version actuelle de Python en fonction de votre OS (Windows, Linux, Mac) Comment installer VSC et Auto Build Marlin + Platformio IDE pour compiler Télécharger Visual Studio Code (VSC) à partir d'ici Le choix dépend du système d'exploitation (OS) de l'ordinateur (Windows (7, 8, 10) / Linux / Mac) et de l'architecture (32 / 64bits). Après téléchargement, un double-clic pour lancer l'installation de VSC. Après installation, ouvrir VSCode. Il faudra ensuite installer l'extension «Auto Build Marlin», clic sur le ① indiqué dans l'image ci-dessous, saisir Auto Build Marlin (ABM) dans ② puis cliquer ③ Installer pour finaliser l'installation. Normalement, l'installation de «ABM» devrait avoir également installé en dépendance Platformio IDE. Si ce n'était pas le cas : Installer l'extension «Platformio IDE», comme pour ABM, clic sur le ① indiqué dans l'image ci-dessous, saisir Platformio IDE dans ② puis cliquer ③ Installer pour finaliser l'installation. Après installation de ces extensions, il faudra probablement effectuer un rechargement pour que ce soit pris en compte via Recharger Une fois ces installations réussies, après un nouveau rechargement, Auto Build Marlin et PlatformIO sont installés et apparaissent dans la liste des extensions (plugins) dans la partie gauche de VSCode. Un clic sur l'icône du plugin PlatformIO (①) (une tête de fourmi (certains y voient un «alien») pour le sélectionner, puis un dernier clic sur ② Ouvrir un projet (Open Project) pour ouvrir le projet et pouvoir commencer à travailler avec. Pour compiler un Marlin, il faut au préalable avoir récupéré les sources fournies sous forme d'une archive compressée Décompresser l'archive récupérée à l'issue du téléchargement, un dossier Marlin-2.0.x doit avoir été créé. C'est ce dossier qu'il faut indiquer lors de l'ouverture du projet via Platformio (le fichier platformio.ini doit y être ainsi qu'un dossier Marlin contenant les fichiers sources qui serviront lors de la compilation) Il est recommandé de récupérer les exemples de configuration d'imprimantes proposés par l'équipe du Marlin. Une fois cette archive décompressée, le dossier config/examples contient de nombreux constructeurs et modèles d'imprimantes Exemples du fabricant Creality : Pour une Creality Ender3, il n'y a que l'embarras du choix en fonction de la carte mère installée sur l'imprimante. Il suffira de recopier les fichiers configuration[_adv].h et éventuellement les [boot|status]screen.h dans le dossier nommé Marlin en remplacement de ceux originaux pour se faciliter les étapes liées au paramétrage avant de lancer la compilation Maintenant que l’environnement de travail est prêt, à vous de jouer Bonne(s) compilation(s) et que le filament coule à flot Ce tutoriel est également disponible sur mon dépôt Github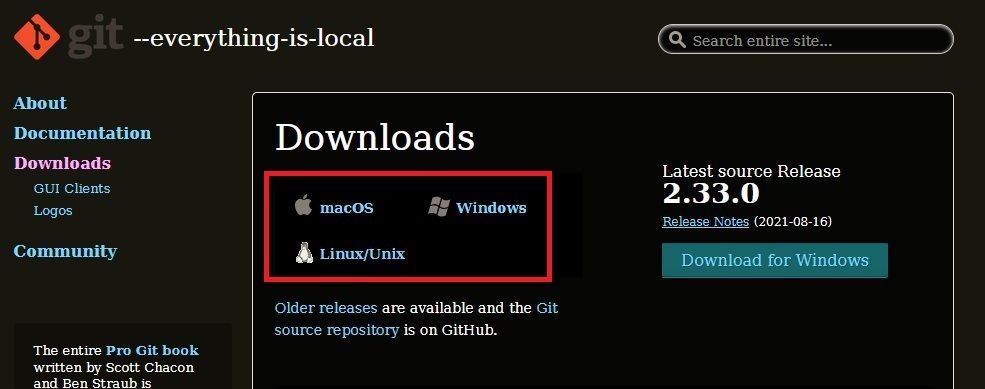



- 14 réponses
-
- 10
-

-

-

marlin installer 3D Touch sur ender 3
leptitcanut a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour, J'ai une Ender 3 que j'ai acheté en 2020. La carte mère est une 1.1.4 et sur l'écran, la version du logiciel est indiqué 1.1.6 J'ai acheté sur amazon ceci : DERUC Geeetech 3D Touch Accessories V3.2 Pro pour imprimante 3D BL Touch Capteur de Niveau Automatique pour imprimante Ender 3 Series, Ender 5, Ender 5 Pro, Ender 5s, CR10, CR10 V3 je mets le lien ci-dessous : https://www.amazon.fr/dp/B08SBPNK3Z?psc=1&ref=ppx_yo2ov_dt_b_product_details J'ai tout bien instalé le materiel. sauf que ensuite, je n'arrive pas à trouver comment paramétrer mon imprimante 3D. Je ne toruve rien qui correspond à mon modèle. Auriez-vous des pistes ou tutoriels et le materiel nécessaire pour le faire ? merci pour votre aide -

marlin Problème de firmware suite mise à niveau Ender 3 Pro
Cricri13 a posté un sujet dans Discussions sur les logiciels 3D
Bonjour à tous, Dans ma présentation du mois de janvier, j'explique la mise à niveau que j'ai effectuée sur mon Ender 3 Pro, soit nouvelle carte mère 4.2.7 microcontrôleur STM32F103RET6, Creality Sprite Extruder Pro, BL Touch et écran tactile 4.3 pouces. Côté installation, pas trop de problème, si ce n'est que la buse d'impression qui montait en température dès l'allumage de l'imprimante et ne s'arrêtait qu'à 300° (c'est un truc de ouf et ça fait de la fumée). Bon les premières fois, j'ai arrêté l'imprimante rapidement, mais j'ai quand même fait le test pour savoir si elle s'arrêtait à un moment. Grâce aux recherches sur le forum, sur le net et auprès du vendeur de l'extruder, j'ai résolu le problème comme suit (si ça peut aider, mais c'est peut-être un coup de bol aussi ). J'avais remis l'écran d'origine de la Ender 3 Pro et comme l'alimentation du bed fonctionne et que la température peut être contrôlée, j'essaie de brancher la buse sur le bed. Retrait des fils rouge/noir d'alimentation du bed (au milieu du connecteur vert, le + à gauche et le neutre à droite). Branchement des fils d'alimentation de la buse du milieu (cosse rouge + à gauche et cosse noir - à droite). Remise en marche de l'imprimante. La température n'est pas montée en flèche. Après env. 15-20 sec. une alarme sonne - arrêt immédiat de la machine. Rebranchement des fils selon configuration initiale et nouvel essai. Rien ne se passe, la température de la buse reste à 22°. Comme le menu de l'écran de commande est en chinois, je remets le firmware Ender-3-Marlin2.0.1.-ET300_HW_4.2.7_SW_1.0.3-20210306.bin et je relance l'imprimante. Et là, MIRACLE (enfin presque). La buse ne monte pas en température de façon incontrôlée (seul le CR Touch ne semble plus fonctionner). Mais il est possible de passer au préchauffage PLA, (200° pour la buse et 60° pour le plateau), il est également possible de bouger tous les axes (X, Y, Z et l'avance de l'extrudeur). J'ai donc remis l'écran tactile 4.3 pouce sur lequel j'avais déjà chargé le firmware de First Layer by Insanity Automation, selon les infos trouvées sur le Forum (en particulier ici, mais aussi d'autres sujets). Je remercie au passage pommeverte pour ses contributions. J'ai essayé de charger différents fichiers .bin (dont ceux de pommeverte), mais malheureusement sans succès. Le mieux que je suis arrivé à faire, c'est avec ce fichierfirmware_E3_Touch_BLT_427_V1.bin mais il ne fonctionne que partiellement (préchauffage bed et buse OK, déplacements OK). Par contre lorsque je fais un "Auto-home", la tête vient se placer sur la moitiée droite du plateau (axe X) et au milieu (axe Y), la buse descend jusqu'au plateau, le BL Touch s'abaisse et stop la descente, puis la buse se positionne à env. 1 cm du plateau. Je me suis donc lancé dans une tentative de configuration d'un firmware en regardant quelques tutos sur Visual Studio Code, avec la base "First Layer" et "Marlin". Je suis arrivé à ceci firmware_E3P_Touch_BLT_DW7.4.9.binmais ça n'est pas concluant. L'écran se retourne à l'envers et je ne peux plus rien faire. Comme je ne suis pas informaticien et que je ne connais pas grand chose, j'avoue que c'est très compliqué. Je précise également que même avec l'écran d'origine de la E3P, je n'ai pas pu faire fonctionner l'extruder sprite et le BL touch. Ne pouvant plus utiliser mon imprimante avec cette nouvelle configuration, je me tourne vers vous afin de savoir si quelqu'un peut m'aider. Merci d'avance et n'hésitez pas à me demander plus de précision si besoin. Bon début de semaine. -

marlin Firmware pour imprimanre delta
wikimimi31 a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour, Je suis en train de réparer une delta FLSUN QQS dont la carte est tombée en panne. La carte d’origine n'étant plus disponible je l'ai remplacé par une MKS Robin Nano V3.1 et un écran MKS TS35 V2 vendu avec. Je tente de programmer un firmware avec Marlin 2.1.2.5. Mon objectif est d'obtenir les mêmes fonctionnalités qu'avec la carte d'origine. J'ai utilisé Configuration.h et Configuration_adv.h fournit dans les exemples pour cette machine que j'ai modifié avec VSC pour les adapter aux drivers des moteurs au sens de rotation et à l'écran mais surtout pour supprimer de nombreuses erreurs de compilation. Actuellement j'arrive à compiler, et le homing se fait correctement, la tête remonte, palpe les endstop puis s’arrête. Ou cela se gâte est quand je lance un Auto Leveling. Le palpeur en Z est celui d'origine, un switch mécanique qui se fixe grâce à un aimant sous la buse et connecté à Z- de la carte Je pense avoir programmé Bilinear, 9 points de mesure et chaque point palpé 2 fois. Mais la machine ne se comporte pas ainsi. La tête fait un homing, descend, palpe deux fois le même point en bord de lit. puis remonte et s'immobilise au milieu du lit à 25 cm environ au dessus. J'ai beaucoup lu sur des forums, questionner une IA en ligne, à taton activé ou désactivé des lignes, le tout sans succès. S'il vous plait, pourriez vous me donner des conseils pour sortir de cette impasse, m'indiquer ce que j'oublie de faire ou ce que j'ai mal fait dans Marlin. Ci-joint les fichiers de configuration dans l'état d'aujourd'hui. Avec mes remerciements. Configuration.h Configuration_adv.h -
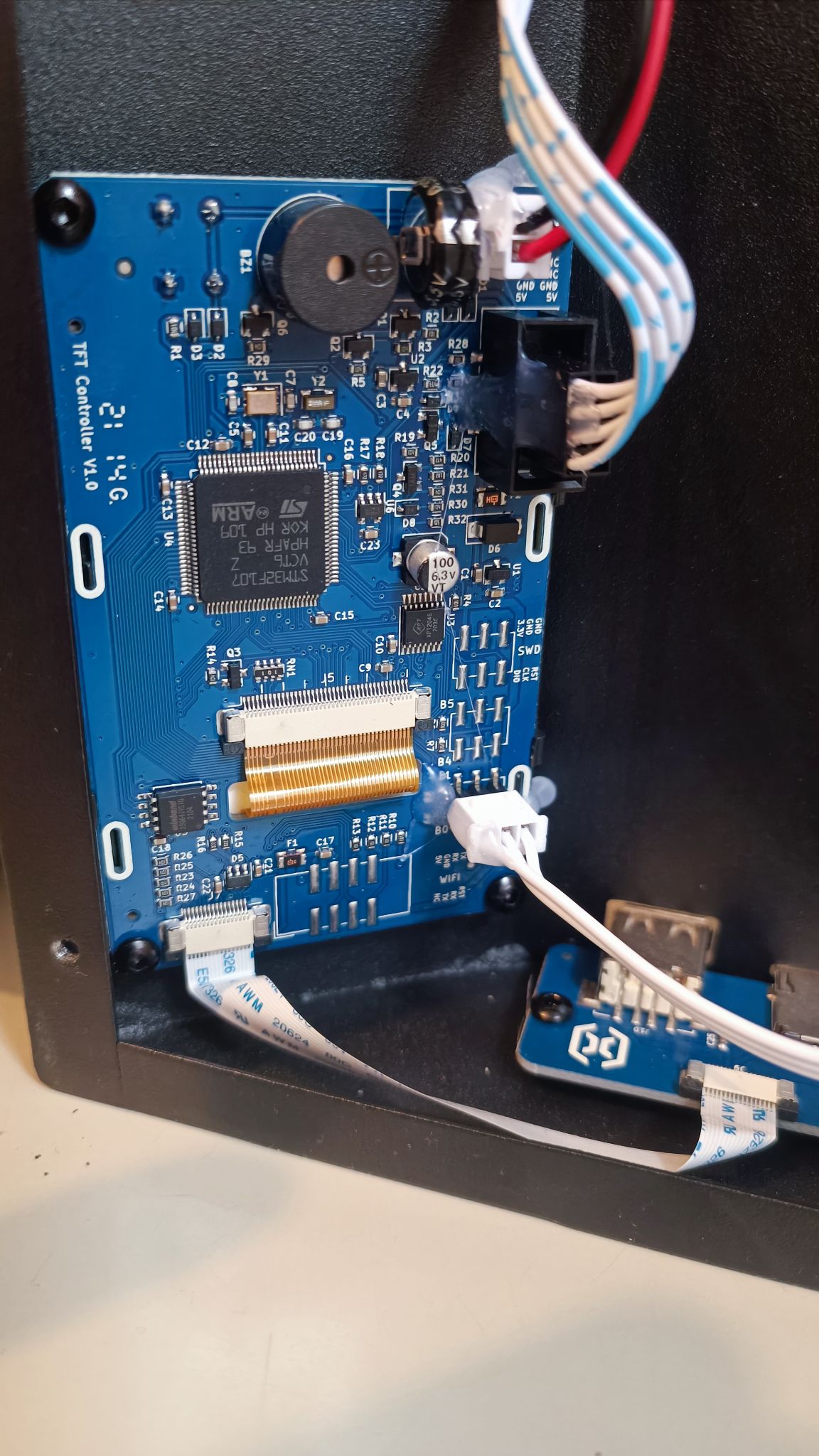
J'ai acheté ma première SWX2 il y a maintenant 1 an sur le site https://artillery3dexpert.fr/ Côté flash, aucun problème en suivant le tutoriel de @MrMagounet Aujourd'hui j'en ai acheté 2 de plus suite à une promo sur Geekbuying.com Mon objectif est de les customiser comme pour la première: - Firmware Marlin customisé - Firmware TFT BIGTREETECH (je n'ai pas encore compris l'utilité de changer pour un autre écran si quelqu'un peut me faire changer d'avis...) > - Réglage des VREF des drivers d'origine (dans l'attente d'avoir essayé un remplacement par des TMC 2209) > sur ma X1 j'ai vu une différence nette - Remplacement des coupleurs d'origine par des coupleurs araignée > meilleure planéité - Tendeurs de courroies > moins de retard sur les mouvements quand on imprime à grande vitesse - 80mm/s par exemple - Remplacement des ressorts de nivellement du plateau par des silicones > réglage de niveau du plateau plus constants - Remplacement des écrous de l'axe Z par des écrous anti-backlash (/!\ à monter à l'envers) > pour supprimer le jeu sur l'axe Z - Remplacement des pieds par des balles de squash > compense le wobble dû aux accélérations brusques - Remplacement du corps de chauffe par un corps de chauffe cuivre plaqué ainsi que du pin du palpeur en carbone > meilleur conductivité thermique - Ajout d'un ZIFLEX pour le plateau > quel bonheur quand j'ai découvert ça! Et j'espère bientôt une dissociation des 2 moteurs du Z, un upgrade des extrudeurs et peut-être (je ne pense pas que ça vaille le coup) un upgrade de tout les câbles... Bref, toute cette liste pour en être bloqué à la 2e étape: le flash du TFT d'origine qui est pour le moment impossible J'ai voulu faire la procédure de base qui est de simplement copier les 4 fichiers du firmware custom du TFT sur une SD de 16Go, mais le TFT ne les chargent pas au démarrage , donc pas de flash... Je vais pour essayer de faire une mise à jour avec un nouveau firmware fournit par le constructeur et là, ça fonctionne! Alors pourquoi? Ont-ils sécurisé leur procédure de flashage du TFT? Sur ma première SWX2 j'ai bien réussi sans problème. Voyons voir la différence entre les 2 cartes des TFT: Sur ma première SWX2: Sur ma nouvelle X2 que je n'arrive pas à flasher: On remarquera les différences et notamment la version du TFT Controller: Donc j'en conclus que sur la V1 Artillery n'a pas sécurisé le flashage du firmware et sur la V1.2 c'est sécurisé par quelque chose. Mais quoi? Sur les fichiers du Firmware du constructeur il y a quelque chose qui débloque le flash... Fichiers du firmware constructeur qui fonctionnent au flash: Fichiers du Firmware BIGTREETECH que je souhaite flasher: Est-ce que cela vient du fichier mkstft28evo.bin? mks_config.txt? Merci pour votre aide!



-
Bonjour à tous, Creality continue de se mettre en conformité avec la licence Open Source de Marlin. La majorité de leurs modèles sont concernés. Le seul absent pour le moment est la CR X. L'adresse pour récupérer ceux-ci se trouve là. Faites chauffer Arduino et bonnes compilations.
-
.thumb.jpg.8e4f3c7962529d5b54999ca8667a07c0.jpg)
marlin MKS SBASE et LCD2004
Guillaume3D a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous, Aujourd'hui j'ai besoin de votre aide sur du très vieux matos Pour mon projet d'imprimante polaire, j'ai à disposition une MKS Sbase v1.3 et un écran LCD2004 (Reprap Discount Smart Controller). J'ai passé énormement d'heures à essayer de les faires fonctionner ensemble, mais j'ai épuisé toutes mes cartes Ma MKS Sbase fonctionne sur les versions Marlin de la 2.0 à la 2.1.4 : tout fonctionne bien, et réagit aux commandes via port COM Mon écran LCD2004 fonctionne : testé sur Marlin 1.1.9 depuis une MKS Gen L Mais impossible d'afficher quoi que ce soit sur l'écran LCD2004 connecté à la MKS Sbase... Le buzzer et le l'incrémenteur fonctionnent, j'ai un retour de son et je peux lancer le menu "à l'aveugle", mais sur l'écran je n'ai que deux rangés de carrés blanc (j'ai bien sûr testé le contraste) J'ai testé un écran 12864 sur la MKS Sbase, et celui-ci fonctionne parfaitement, je n'y comprends rien... J'ai vérifié les connections, les câbles, le mappage dans le fichier "pins_MKS_SBASE.h", et tout est bon, je me demande si ce n'est pas une histoire de librairies peut-être (vu que l'écran fonctionne sous Marlin 1.1.9) Merci à tous -
Bonjour à tous, Après un print de 13h qui a foiré (couches décalées), j'ai tenté de relancer l'impression après quelques réglages, mais je me suis aperçu que mon nivellement automatique déconnait... J'utilise un nivellement 3*3 (soit 9 points) sur une des dernières version de Marlin (2.1.4 je crois) que j'utilise depuis plusieurs mois sans problèmes, mais je me suis aperçu que depuis cette impression qui a foiré (je surveille toujours le début des impressions et ça fonctionnait encore pour la dernière), le nivellement ne se fait plus que sur la première ligne de palpage, donc sur uniquement 3 points (quand je lance un nivellement manuel, ça passe directement du point "3/9" à "terminé"). Je n'ai modifié aucun paramètres de nivellement, et mon capteur semble toujours très bien fonctionner (capteur inductif). J'ai fait toute une série de tests, mais tout fonctionne à part le nivellement donc je ne sais pas si la carte (SKR 1.4) a rendu l'âme ou pas encore. Des pistes ? Merci à tous
-

marlin Tevo Tornado Custom à retaper
pinfomatique a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Hello tout le monde, Après m'être présenté, je viens poster le sujet du jour. Une connaissance m'a donné sa Tevo Tornado, après qu'un de ses potes y ai mis les pattes sans s'y connaitre et l'ai complètement déréglée. Pour commencer, je me suis intéressé à l'impression 3D que depuis que j'ai récupéré cette Tornado, il y a environ 1 mois, donc je ne connais pas encore tous les rouages ni tous les noms/termes etc. Le hardware est pas mal modifié et je vous dis pas pour le soft, c'est un gros bordel. En énorme résumé : elle est capable d'imprimer, mais ca colle pas au plateau, le BLTouch fait ses coins de test mais n'a pas l'air d'être configuré, l'imprimante fait des accoups durant l'impression et le filament à l'air de mal être acheminé (manque de filaments par moment) y'a surement d'autre problèmes, je n'ai pas eu le temps de vérifier la planéité du plateau par exemple (je sais qu'il y a souvent des problèmes de plateaux bombés). A cause des accoups j'ai décidé d'arrêter de tester les impressions pour le moment, car je ne sais pas si ca vient d'un moteur qui bloque. Donc pour les infos détaillées et photos : La carte mère d'origine MKS Gen_L V1.0 Les drivers ont été remplacés par des TMC2209 V3.0 pour les 3 axes : Et un LV8729 pour la buse : des TL-Smoother on été installés : L'extrudeuse a été remplacée par une Creality en Alu : Pour le reste, ventilation custom de la buse (tension d'origine 24V), des amortisseurs de vibrations sur les moteurs, le plateau a été remplacé par un magnétique, un BLTouch (original) a été ajouté à la va vite. mais le support imprimé étant cassé, je l'ai pour le moment déconnecté et enlevé. Enfin coté software un Marlin "à la n'importnawak" a été bricolé comme on tartine du nutella quand on a 12 ans. Ca fait beaucoup et j'aimerai donc savoir par où il me faudrait commencer pour remettre tout ca en place correctement. Est ce que je peux tout remettre à zéro et repartir sur une base saine ? Ou faut il suivre des étapes pour éviter des disfonctionnement ? J'ai testé le matériel, aucun dommage électrique. Donc tous les composants sont OK. Il semble, d'après toutes mes recherches sur "comment installer et connecter", que les branchements soient tous corrects, excepté pour le fait que j'ai déconnecté le BLTouch. mais les photos sont là pour que vous puissiez juger. Il m'a laissé aussi des drivers restant (ils étaient vendu en trop) et refilé quelques bobines de filaments (certains neuf emballés), mais j'ai aussi cru comprendre qu'il fallait faire gaffe à la façon dont on les stock (trop d'humidité etc) Voilà voilà, si vous avez besoin de plus de détails pour me venir en aide, ca sera fait ! PS : Elle est pas très belle a voir, il l'a délaissée pendant un certain temps, donc pas mal de poussière. Je posterai des photos de la bête quand elle sera propre. -

[STICKY] Dernière Version MARLIN pour DISCOEASY 200
dobodu a posté un sujet dans Mise à jour et/ou amélioration
Salut les copains. Plutôt que chercher dans les divers posts du forum les mises à jour appropriées de nos chères et tendres discoeasy200, je vous propose que nous regroupions sur ce thread, uniquement les mises à jours des firmwares MARLIN Pour les plus curieux d'entre nous : La page d'accueil du site MARLIN / Le dépot GITHUB pour les derniers correctifs Vous y trouverez les coordonnées de la Team qui développe le firmware, je ne suis qu'un simple "arangeur" Mes notations pour les firmwares : Modifications nécessitant juste un paramétrage dans Configuration.h ou dans Configuration_adv.h Trapeze = Firmware incluant la modification du pas pour les tiges trapézoidales (8mm/tour) MK8 = Firmware incluant la modification du pas d'extrusion pour un engrainement de type Prusa MK8 (pour moi 133p/tours) Pour les "DiscoEasy non modifiées", il suffit de rechercher Dobodu dans les 2 fichiers et de suivre les instructions Modification plus profondes du firmware NumC = Firmware incluant l'affichage des numéros de couches (Thanks Gyverblaster) PinMod = Firmware considérant la modification des EndStops SELON LA CARTE DE CONTROLE et non selon le câblage d'origine DAGOMA Cela signifie que le contacteur X- (respectivement Y+, Z-) est cablé sur le End Stop X- (respectivement Y+, Z-) Cablage pour les versions antérieures à la 2.1.1 Cablage pour la version 2.1.1 Variantes diverses Ecran : Utilisation de l'écran/Lecteur de carte Dagoma Heatbed : Précision si le firmware est paramètré pour l'utilisation d'un lit chauffant BLTouch : Firmware prenant en compte le BLTouch en lieu et place du capteur par induction (à faire) Babystepping : Firmware autorisant les réglages de positionnement de 1ere couche pendant l'impression FWRetract : Gestion du retrait du filament par Marlin ATX : Utilisation de l'alim ATX (to be continued)
-
bonjour , il y a peu de temps j'ai changer ma carte creality pour installer une SKR mini E3 v2 avec écran tactile pour mon Ender 5 pro tous c'est bien passer à l'installation et au branchement marlin de version bugfix-2.0.x mais j'ai tout de suite remarquer que mes moteur tourner à l'envers donc Z+ descendais Z- montais, X- allais à droit et X+ à gauche ,Y+ allais devant Y- allais derrière et c'est pareil pour Ultimaker Cura quand je mets un objet devant sa imprime derrière et inversement, je ne comprend pas comment faire et je ne trouver rien pour régler le problème je ne sais pas si c'est dans le marlin que je dois modifier le probleme ou c'est un probleme de branchement avec le Z+ ou Z- vue que sur la carte j'ai de connectique Z un + et un - ,
-
 Bonjour à tous, Je ne suis pas sûr d'être au bon endroit pour poster cela, auquel cas je m'en excuse. Je vous écris car je suis à court d'idées. Je possède une Tevo Tornado Gen2 équipée d'une MKS Gen L. C'est une imprimante que j'ai depuis plusieurs années maintenant et que j'améliore et bichonne comme personne. Récemment, j'ai eu un problème avec mon BLTouch. Mon BLTouch est un v2 que j'ai depuis presque aussi longtemps que mon imprimante. Je l'ai installé sous Marlin v1 sans aucun souci. Les années passent et les améliorations aussi (TMC2208, maj Marlin v2.1.2.1, extrudeur Orbiter v2, Octoprint, et sans doute d'autres que j'ai oubliées). Un jour, sans crier gare, mon BLTouch a cessé de fonctionner. Lors d'un Z home, la sonde descend et remonte, mais l'axe Z ne bouge pas. En cherchant sur le net, j'ai souvent vu que ce problème provient d'un problème de connectique sur la prise du BLTouch. J'ai donc pris mon fer à souder et enlevé la cosse pour souder les fils en direct, mais rien n'y fait. J'ai donc commandé un 3DTouch, qui rencontre le même problème alors qu'il est neuf. J'ai donc fait ma soudure sur mon BLTouch pour rien... J'ai essayé de brancher le 3DTouch directement sur la carte mère, et là ça fonctionne. J'enlève le 3DTouch et rebranche mon BLTouch modifié, celui-ci fonctionne aussi. Je me dis alors que cela vient du câblage entre ma carte mère et ma tête d'impression. J'utilise donc le câble livré avec le 3DTouch, mais cela ne fonctionne pas, même problème. Je refais le câblage moi-même avec des nappes et des connecteurs Dupont, rien. Je rebranche en direct sur la carte mère pour m'assurer de ne pas être fou, et cela refonctionne. J'abandonne pendant un temps. Après un déménagement, je m'y remets. Et là, autre chose : le BLTouch et le 3DTouch ne sont même pas reconnus par l'imprimante (la petite LED bleue ne s'allume plus) en passant par les rallonges (que ce soit celle du BLTouch toujours présente sur l'imprimante, celle livrée avec le 3DTouch, ou la mienne fabriquée à la main), et en rebranchant en direct tout refonctionne. Je me dis alors "problème d'interférences". Je sépare de la nappe le fil jaune du signal du reste en pensant à une interférence avec l'alimentation 5V, et là, la LED bleue fait son retour et l'axe Z descend enfin, mais la sonde n'envoie aucune info à l'imprimante et la buse vient s'écraser sur le lit. BLTouch et 3DTouch, idem. En me disant que je suis sur la bonne voie, je refais une 4ème rallonge avec les 5 fils totalement séparés, et c'est le retour de la buse kamikaze. Je fais la mise à jour de Marlin 2.1.2.4, pareil. Je modifie les pins sur la carte mère pour passer le BLTouch de la pin D11 à D4, rien n'y fait. Et toujours en rebranchant en direct, tout fonctionne parfaitement. Donc là, je sèche et je m'en remets à vous. Je suis loin d'être un expert, juste un bidouilleur. Je vous mets, si possible, mon firmware actuel en pièce jointe. Merci à vous. Configuration.h Configuration_adv.h
Bonjour à tous, Je ne suis pas sûr d'être au bon endroit pour poster cela, auquel cas je m'en excuse. Je vous écris car je suis à court d'idées. Je possède une Tevo Tornado Gen2 équipée d'une MKS Gen L. C'est une imprimante que j'ai depuis plusieurs années maintenant et que j'améliore et bichonne comme personne. Récemment, j'ai eu un problème avec mon BLTouch. Mon BLTouch est un v2 que j'ai depuis presque aussi longtemps que mon imprimante. Je l'ai installé sous Marlin v1 sans aucun souci. Les années passent et les améliorations aussi (TMC2208, maj Marlin v2.1.2.1, extrudeur Orbiter v2, Octoprint, et sans doute d'autres que j'ai oubliées). Un jour, sans crier gare, mon BLTouch a cessé de fonctionner. Lors d'un Z home, la sonde descend et remonte, mais l'axe Z ne bouge pas. En cherchant sur le net, j'ai souvent vu que ce problème provient d'un problème de connectique sur la prise du BLTouch. J'ai donc pris mon fer à souder et enlevé la cosse pour souder les fils en direct, mais rien n'y fait. J'ai donc commandé un 3DTouch, qui rencontre le même problème alors qu'il est neuf. J'ai donc fait ma soudure sur mon BLTouch pour rien... J'ai essayé de brancher le 3DTouch directement sur la carte mère, et là ça fonctionne. J'enlève le 3DTouch et rebranche mon BLTouch modifié, celui-ci fonctionne aussi. Je me dis alors que cela vient du câblage entre ma carte mère et ma tête d'impression. J'utilise donc le câble livré avec le 3DTouch, mais cela ne fonctionne pas, même problème. Je refais le câblage moi-même avec des nappes et des connecteurs Dupont, rien. Je rebranche en direct sur la carte mère pour m'assurer de ne pas être fou, et cela refonctionne. J'abandonne pendant un temps. Après un déménagement, je m'y remets. Et là, autre chose : le BLTouch et le 3DTouch ne sont même pas reconnus par l'imprimante (la petite LED bleue ne s'allume plus) en passant par les rallonges (que ce soit celle du BLTouch toujours présente sur l'imprimante, celle livrée avec le 3DTouch, ou la mienne fabriquée à la main), et en rebranchant en direct tout refonctionne. Je me dis alors "problème d'interférences". Je sépare de la nappe le fil jaune du signal du reste en pensant à une interférence avec l'alimentation 5V, et là, la LED bleue fait son retour et l'axe Z descend enfin, mais la sonde n'envoie aucune info à l'imprimante et la buse vient s'écraser sur le lit. BLTouch et 3DTouch, idem. En me disant que je suis sur la bonne voie, je refais une 4ème rallonge avec les 5 fils totalement séparés, et c'est le retour de la buse kamikaze. Je fais la mise à jour de Marlin 2.1.2.4, pareil. Je modifie les pins sur la carte mère pour passer le BLTouch de la pin D11 à D4, rien n'y fait. Et toujours en rebranchant en direct, tout fonctionne parfaitement. Donc là, je sèche et je m'en remets à vous. Je suis loin d'être un expert, juste un bidouilleur. Je vous mets, si possible, mon firmware actuel en pièce jointe. Merci à vous. Configuration.h Configuration_adv.h -

Compilation Marlin pour SKR E3 V3 mini
Nzo_dev a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour, je n'arrive pas a compiler mon firmware marlin pour mon ender 3 avec une skr e3 v3 mini, il ne me trouve pas un fichier sur mon ordinateur mais je ne sais pas comment faire. Mon erreur: PS C:\Users\Utilisateur\Documents\Marlin-bugfix-2.1.x> platformio run --target upload --silent -e STM32G0B1RE_btt FileNotFoundError: [WinError 3] Le chemin d’accès spécifié est introuvable: 'C:\\Users\\Utilisateur\\.platformio\\packages\\framework-arduinoststm32\\variants\\MARLIN_G0B1RE': File "C:\Users\Utilisateur\.platformio\penv\Lib\site-packages\platformio\builder\main.py", line 167: env.SConscript(env.GetExtraScripts("pre"), exports="env") File "C:\Users\Utilisateur\.platformio\packages\tool-scons\scons-local-4.7.0\SCons\Script\SConscript.py", line 612: return _SConscript(self.fs, *files, **subst_kw) File "C:\Users\Utilisateur\.platformio\packages\tool-scons\scons-local-4.7.0\SCons\Script\SConscript.py", line 279: exec(compile(scriptdata, scriptname, 'exec'), call_stack[-1].globals) File "C:\Users\Utilisateur\Documents\Marlin-bugfix-2.1.x\buildroot\share\PlatformIO\scripts\generic_create_variant.py", line 57: variant_dir.mkdir() File "C:\Users\Utilisateur\.platformio\python3\Lib\pathlib.py", line 1116: os.mkdir(self, mode) ========================================================================================== [FAILED] Took 1.84 seconds ========================================================================================== Environment Status Duration --------------- -------- ------------ STM32G0B1RE_btt FAILED 00:00:01.837 ==================================================================================== 1 failed, 0 succeeded in 00:00:01.837 ==================================================================================== PS C:\Users\Utilisateur\Documents\Marlin-bugfix-2.1.x> echo "done" >"C:\Users\UTILIS~1\AppData\Local\Temp\ipc" PS C:\Users\Utilisateur\Documents\Marlin-bugfix-2.1.x> -

marlin Photo cable Dupont flashage SWX2
Alain69720 a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous Je vais me lancer pour la mise à jour de ma SWX2 car je voudrais faore des impressions plusieurs couleurs J'ai commandé des cables Dupont car ma sidewinder X2 n'apparait pas en temps que périphérique USB Est ce que quelqu'un a une photo de la CM ou positionner ce shunt? D'autre part sur le tuto de flashage du TFT de @MrMagounet il est question de version de bootloader, mais à l'allumage il n'y a rien qui s'affiche sur l'écran en ce qui concerne cette version. Ou trouver cette info? Sinon mon PC est dous windows 11 W64 Merci d'avance -
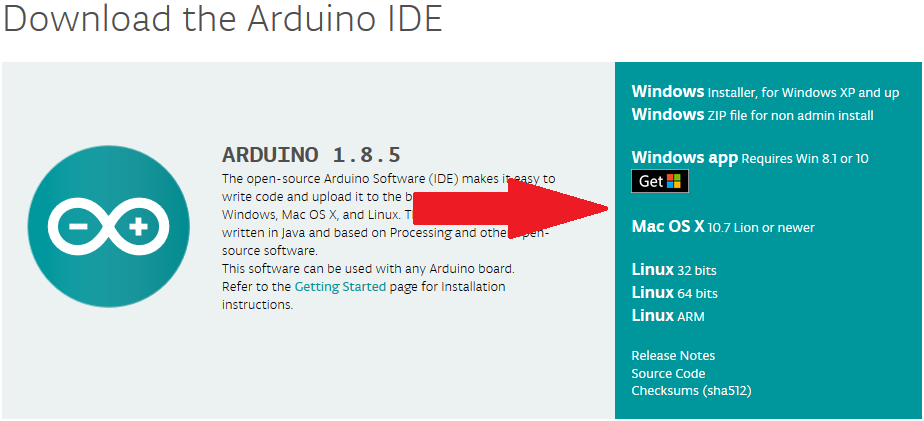
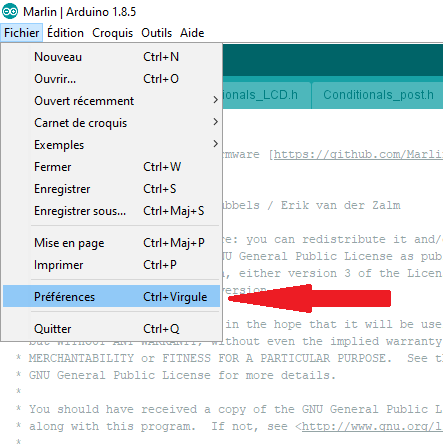
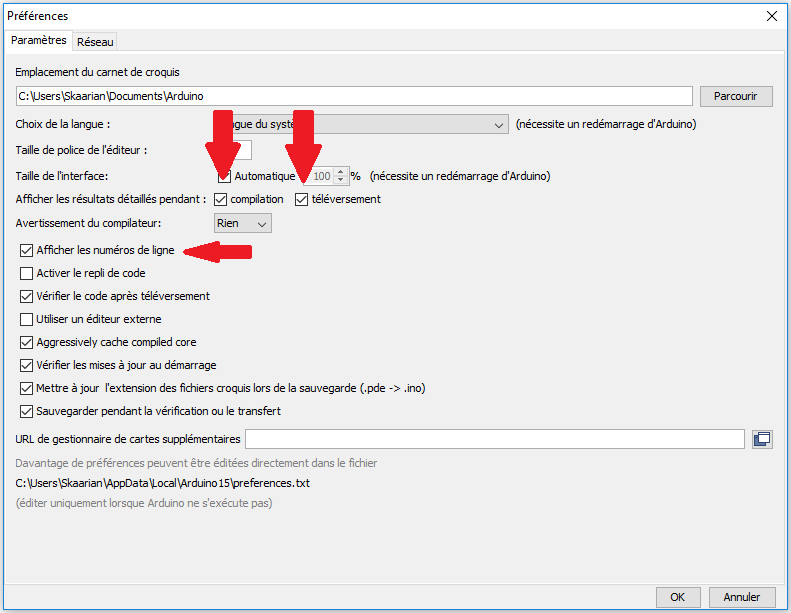
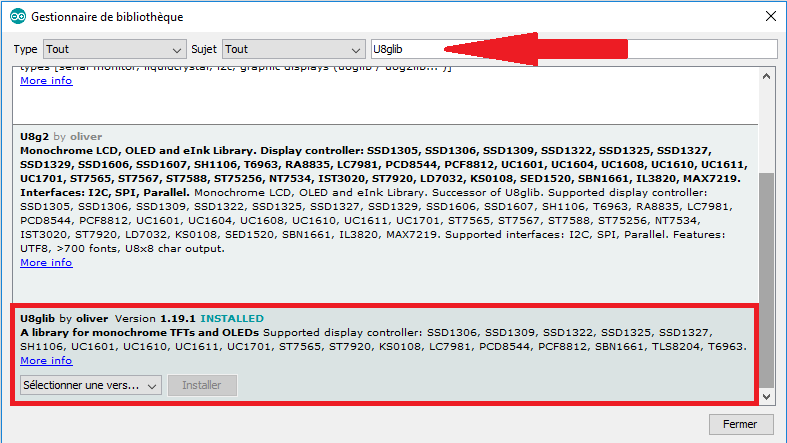
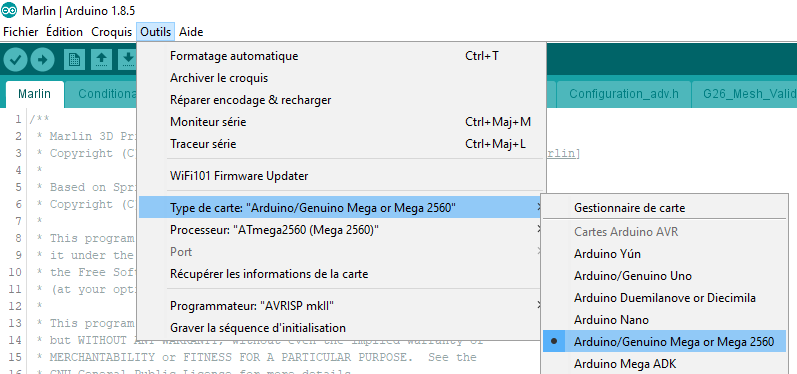
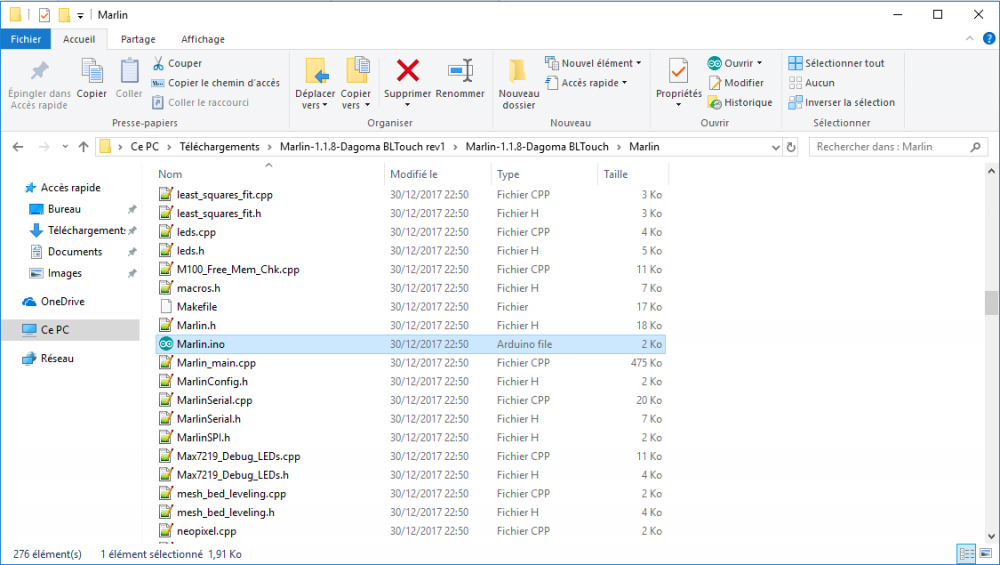
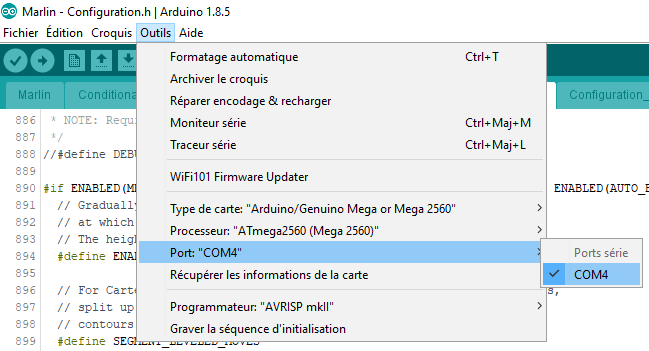
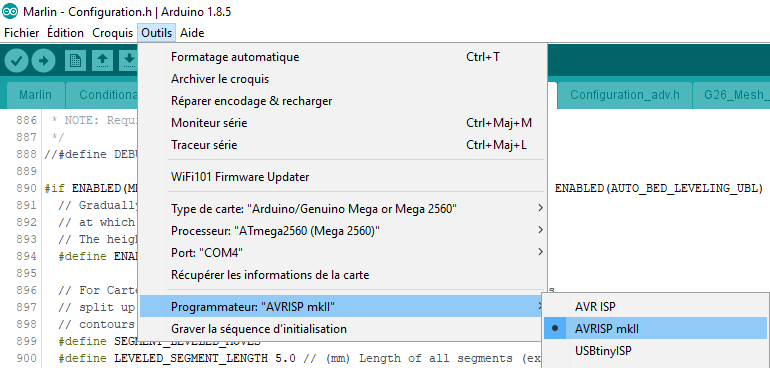
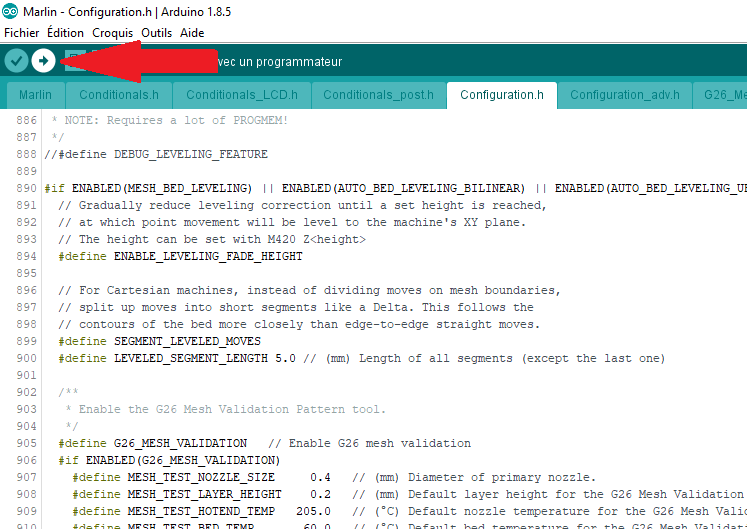
Bonjour, Suite aux nombreux postes des utilisateurs ayants des difficultés à compiler/téléverser un nouveau marlin via le logiciel Arduino sur leur DiscoEasy j'ai préparer ce petit tutoriel. Si vous êtes prêt, on y va... Il y en a pour cinq minutes maximum ! Après vous pourrez modifier comme vous le souhaitez votre DiscoEasy. Installation et configuration d’Arduino : Pour commencer, téléchargez la dernière version d’Arduino ICI . Le logiciel à télécharger ce trouve plus bas sur la page coté droit (voir image ci-dessous ) : Une fois le logiciel téléchargé, rien de compliqué. Installez le en cliquant sur suivant à chaque étape. Une fois l'installation terminée, nous allons passer à la configuration de ce dernier pour qu'il prenne en compte la carte MKS Base de la DiscoEasy. Lancez Arduino, puis allez dans "Fichier/Préférences" ou faites simultanément les touches CTRL + VIRGULE (Voir image ci-dessous) : Une fenêtre s'ouvre ! Afin d'y voir plus claire en cas d'erreur de compilation ou de téléversement, on va activer les résultats détaillés dans les paramètres ! Cochez les cases indiqués par une flèche rouge sur l'image ci-dessous. Une fois terminé cliquez sur "OK" en bas à droite. Maintenant, allez dans "Croquis/Inclure une bibliothèque/Gérer les bibliothèques comme indiqué sur l'image suivante : Une fenêtre s'ouvre. Ici nous allons inclure une bibliothèque manquante et mettre à jour celles déjà installées ci nécessaire ! Commençons par installer la librairie U8glib nécessaire pour marlin qui n'est pas présente dans Arduino après l'installation. Comme indiqué par une flèche rouge dans l'image qui suit, dans l'onglet de recherche écrivez : "U8glib". Cliquez dans la liste sur U8glib by olivier encadré en rouge sur l'image. Cliquez sur le bouton "Installer". Voilà, c'est fait Il est possible que certaine de vos bibliothèques ne soient pas à jour. Pour les mettre à jour, sélectionnez dans le menu déroulant (à gauche du champ de recherche que nous avons vu il y a un instant) "Type" : "Possible de mettre à jour". Si des bibliothèques apparaissent dans la liste, vous cliquez sur chaque une d'entre elle est sur le bouton mise à jour (comme pour installer une nouvelle bibliothèque). Plus qu'une étape et le logiciel est prêt ! A présent, on va indiquer à Arduino pour qu'elle type de carte le compilateur doit fonctionner. Pour ce faire, ouvrez le menu "Outils/Type de carte" cliquez sur "Arduino/Genuino Mega or Mega 2560" comme surligné sur l'image ci-dessous : Puis choisir le programmateur: "AVRISP mkII". Maintenant, ouvrez la version de marlin que vous avez modifié à téléverser en cliquant sur le fichier "marlin.ino": Arduino ouvre le marlin, allumez votre imprimante. Laissez la booter sur le marlin actuel. Une fois le boot terminé branchez le câble USB de votre PC à l'imprimante. Normalement, elle va rebooter une nouvelle fois. Une fois qu'elle a terminée, rendez vous sur le logiciel Arduino déjà ouvert et cliquez sur "Outils/Port:" Sélectionnez le port de communication (Port COM4) sur l'image si-dessous, mais celui-ci peut varier en fonction de votre configuration ! Voilà, tout est prêt ! Cliquez sur le bouton "Téléverser" indiqué par une flèche rouge sur l'image qui suit : Et paf ça fait des chocapics !.... Normalement, il va compiler puis téléverser le nouveau marlin ! Cette opération peut prendre un peu de temps. Pour voir si le téléversement ce fait après la compilation, je vous conseil de mettre le plateau en position arrière. Quand les leds bleus vont s'allumer c'est que le téléversement à commencé ! Une fois le téléversement terminé, l'imprimante va rebooter toute seule !! Elle est prête avec votre nouveau marlin ! PS : Si vous possédez un écran, il faut réinitialiser l'EEPROM. Avec votre molette allez dans le menu : "Contrôler" descendre tout en bas est appuyez sur "Initialiser EEPROM". Bon print !

-

marlin Réinitialisation Ender 3 V2
Speedy-320 a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous Peut on ré installer la version d'origine , j'ai acheté mon ender 3 V2 en nov 2020, mon fils à voulu l'upgrader avec je ne sais pas avec quel firmware et maintenant je suis bloqué avec un écran noir . pouvez vous me dire quel est le firmware d'origine sur cette imprimante achetée en nov 2020 ? Et dois je refaire une réinitialisation de l'écran via une carte SD aussi avec un fichier .bin... il y a 8 minutes -
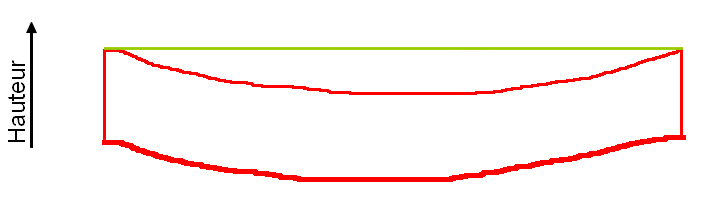
Petit tuto sans prétention pour qui veut comprendre quelques aspects de Marlin, et surtout comment trouver de la place pour ceux qui, comme moi, ont une carte mère limitée. Les plus assidus du forum n'y apprendront rien ou presque, pour le reste, j'espère que ce post pourra être utile. Je suppose dans ces lignes que le lecteur sait déjà comment flasher sa machine avec le logiciel Arduino, et modifier les fichiers configuration.h et configuration_adv.h Je vais essayer de suivre l'ordre des fichiers de configuration, pour ne pas avoir à chercher trop longtemps les lignes correspondantes, mais il faut savoir que je ne détaillerai pas tout : Bien des lignes doivent rester telles quelles si l'on veut garder une imprimante fonctionnelle. Pour info, je me base sur une version de Marlin 1.1.9. Fausses idées toutes faites Tout d'abord, je souhaitais tuer dans l’œuf les fausses croyances que j'ai déjà pu lire ici et ailleurs : Il est inutile de supprimer les commentaires, cela ne vous fera que perdre votre temps Les fonctions commentées (celles commençant par '//'), ne sont pas incluses à la compilation, il est tout aussi inutile des les supprimer Fichiers de langues inutilisées : Dans language_fr.h par exemple, on voit que des tas de lignes concernant le détecteur de fin de filament, l'utilisation de l'UBL (Unified Bed Leveling), etc qui ne sont pas commentées. Même si vous n'utilisez pas ces fonctions, il est inutile de supprimer ou commenter ces variables de langue, elles ne seront pas incluses dans la compilation de Marlin. Lors de la compilation, Arduino va aller chercher et compiler uniquement les informations qui sont nécessaires, aucun superflu ne sera mis en mémoire. Dans la même lignée, rien ne sert de supprimer les lignes vides. Pour la bonne compréhension : - Chaque ligne qui commence par '//' est un commentaire ou une fonction commentée. Cela veut dire qu'Arduino ne lira pas cette ligne, et passera à la suite. - Chaque ligne qui commence par '#' est une instruction. Seules ces lignes seront lues, interprétées et compilées pour votre imprimante. Configuration.h Je ne détaillerai ici que le fichier configuration.h. J'espère avoir le temps dans les jours à venir de faire la même chose pour le fichier configuration_adv.h. Jacky Tuning On commence avec du superflu, l'écran de démarrage : Ligne 80 du fichier : #define STRING_CONFIG_H_AUTHOR "Schyzo, Anet E12 BLTouch" // Who made the changes. #define SHOW_BOOTSCREEN #define STRING_SPLASH_LINE1 "V1.1.9 for Anet E12" // will be shown during bootup in line 1 #define STRING_SPLASH_LINE2 "Adapted For Schyzo" // will be shown during bootup in line 2 Ces 4 lignes ne font qu'afficher l'écran de démarrage ( Boot Screen). L'imprimante n'a pas besoin de ça, et moi non plus. Sans cet écran, l'imprimante sera lancée environ 5 secondes plus rapidement. Commentez-donc ces 4 lignes (en ajoutant '//' devant chaque ligne) si vous voulez gagner plus de 1000 octets (1282 chez moi). Toujours dans le look, ligne 97 : #define SHOW_CUSTOM_BOOTSCREEN Ceci ne sert qu'à afficher une image personnalisée définie dans le fichier Marlin/_Bootscreen.h au démarrage. Certains fournissent une image comme TH3D qui ne fait qu'alourdir le firmware. Vous pouvez commenter Puis, à la ligne 100 : #define CUSTOM_STATUS_SCREEN_IMAGE Même combat, une image personnalisée sur l'écran d'accueil, définie dans le fichier Marlin/_Statusscreen.h comme ici : Vous pouvez commenter cette ligne pour gagner de précieux octets (voir plus). PID Le PID (Proportional Integral Derivative) est un procédé de Marlin et autres firmwares qui permet une montée en température optimisée des éléments chauffants (buse et lit). Lorsque le PID de ces éléments n'est pas activé, la montée en température est définie en 'bang-bang', comprendre en gros en binaire : "Si c'est trop froid, j'envoie du courant à fond, si c'est à bonne température, je coupe". Aussi la température ne fait que monter et descendre, ce qui peut poser une dégradation de l'impression notamment avec la température de la buse. A titre d'exemple, j'ai trouvé cette image sur le forum reprap.org : Page en question : https://reprap.org/forum/read.php?262,782815 Exemple de courbe de température en bang-bang : Avec utilisation du PID : Bref, si j'en parle ici c'est que l'utilisation du PID pèse quand même quelques kilos dans la bataille du gain de mémoire. Pour ma part, j'ai activé le PID de la buse et du lit, quitte à supprimer d'autres fonctions. PID de la buse : Pour l'activer, il faut se rendre à la ligne 362 : #define PIDTEMP Puis environ 20 lignes plus bas, il faut définir les valeurs Kp, Ki et Kd : #define DEFAULT_Kp 28.94 #define DEFAULT_Ki 2.37 #define DEFAULT_Kd 88.30 Si ces lignes sont commentées, décommentez-les. Ces valeurs que je n'expliquerai pas faute de compétence (et ce n'est pas le sujet), sont MES PROPRES valeurs. C'est elles qui définiront la montée en température de votre élément chauffant. A chaque changement de buse ou matériel chauffant (cartouche chauffante par exemple), il faut redéfinir ces valeurs. Pour cela, je vous renvoie vers un tuto du forum qui explique pas à pas la marche à suivre pour récupérer ces 3 paramètres selon votre machine : A noter que l'utilisation du PID pour la hotend requiert environ 3300 octets. PID autotune : Marlin propose d'ajouter un menu dans l'imprimante afin de lancer un autotune, c'est à dire que vous pourrez lancer directement depuis l'écran de l'imprimante un autotune qui calculera et enregistera les meilleurs valeurs pour votre imprimante. Cette fonction lancera une montée en température de la buse (température que vous définirez via l'écran de l'imprimante directement), jugera et enregistrera dans l'EEPROM des meilleurs valeurs obtenues. Pour cela, décommentez la ligne 367 : #define PID_AUTOTUNE_MENU Lors de l'autotune, sélectionnez une température que vous employez le plus. Par exemple si vous n'imprimez que du PLA et PETG, prenez une moyenne haute à 230° par exemple. Le PID autotune occupera 600 octets environ de plus. PID du bed : Pour le lit, l'utilisation du PID reste identique, à savoir une température constante. En mode BED_LIMIT_SWITCHING en revanche, on retrouve la chauffe binaire : On chauffe à fond ou rien du tout. Si vous souhaitez activer l'utilisation du PID pour le lit chauffant, décommentez la ligne 407 : #define PIDTEMPBED Et n'oubliez pas de commenter la ligne 409 afin de libérer un peu de place : //#define BED_LIMIT_SWITCHING Puis comme pour la buse, définissez les valeurs de Kp, Ki et Kd ligne 424 : #define DEFAULT_bedKp 255.01 #define DEFAULT_bedKi 17.39 #define DEFAULT_bedKd 934.85 L'utilisation du PID pour le lit chauffant occupera environ 1400 octets de plus que le mode BED_LIMIT_SWITCHING. A noter qu'il ne sera pas possible, même en ayant activé l'autotune, de lancer un test autotune pour le bed depuis l'écran LCD (vous ne devrez pas avoir à le changer régulièrement, je l'espère pour vous ). Là encore, je vous renvoie vers le tuto de neoraptor pour récupérer les valeurs Kp, Ki et Kd pour votre lit : Protection contre vous-même : Si jamais vous avez confiance en vous, sachez qu'il est possible de désactiver la protection d'extrusion à froid, ligne 445 : #define PREVENT_COLD_EXTRUSION // Permet de ne pas faire tourner l'extrudeur si la température de la buse n'est pas d'au moins 170° (EXTRUDE_MINTEMP) et la protection d'une trop grande extrusion manuelle, ligne 452 : #define PREVENT_LENGTHY_EXTRUDE // Protection pour ne pas extruder plus de 200mm (EXTRUDE_MAXLENGTH) en dehors d'une impression Ces 2 fonctions commentées vous feront gagner presque 1000 octets, à vous de jauger votre confiance en vous Je ne détaillerai pas la désactivation des protections thermiques du bed et de la hotend, qui sont à mes yeux essentielles et donc non négociables. Bed leveling Si certains ont déjà du mener la bataille des octets avec Arduino, ceux-ci savent combien l'utilisation d'un palpeur est lourd. Pour avoir fait quelques tests pour ce tuto, j'estime à 18ko le poids de l'utilisation d'un BLTouch par rapport à un simple endstop. Mais saviez-vous que vous pouviez tout de même espérer libérer un peu de place ? Chaque mode de leveling pèse plus ou moins lourd, et est plus ou moins complet forcément. Bi-linéaire Ligne 982 : #define AUTO_BED_LEVELING_BILINEAR Le mode certainement le plus utilisé et adapté à la plupart des plateaux. Grâce à un palpeur/sonde (BLTouch ou autre), il fait 3 palpages (points) ou plus dans chaque axe (X Y) et en détermine grossièrement ou finement selon le nombre de points déterminés les défauts du plateau, qu'il corrigera pendant l'impression. Nécessite 11 ko sur la carte. 3 points Ligne 980 : #define AUTO_BED_LEVELING_3POINT Avec un palpeur, sonde 3 points déterminés et détermine le nivellage du plateau. Plus léger (6 ko), à n'utiliser que si vous êtes sûrs que votre plateau est bien plat. Linéaire Ligne 981 : #define AUTO_BED_LEVELING_LINEAR Semblable au mode bi-linéaire, corrige un défaut de lit qui ne serait pas correctement incliné. Ce mode ne corrige pas les défauts d'un lit déformé (creux au centre par exemple). Nécessite 11 ko sur la carte, je cherche l'intérêt de ce mode. Unified Bed Leveling (UBL) Ligne 983 : #define AUTO_BED_LEVELING_UBL Ce mode est trop gros pour ma carte, aussi je n'ai pas pu le tester. Quoi qu'il en soit, celui-ci permet de créer une matrice très précise de votre lit et d'en enregistrer les relevés dans l'EEPROM. Puis à chaque impression, palpe 3 points pour déterminer l'inclinaison et les défauts du lit puis s'appuie sur les valeurs précédemment enregistrées pour corriger très précisément l'impression en fonction des défauts de votre lit. Pèse approximativement 48 ko. Mesh Leveling Ligne 984 : #define MESH_BED_LEVELING Un mode que j'ai découvert il n'y a pas longtemps. Celui-ci permet de corriger une déformation du lit, sans nécessiter de palpeur. Vous faites le sondage à la main (aidé par Marlin bien sûr) avec votre feuille de papier, vous jouez avec le Z depuis l'écran LCD et celui-ci corrige les défauts du lit pendant l'impression, comme si vous aviez un BLTouch. 9.7 ko nécessaires pour ce mode. Hauteur lissée (fade height) Avec certains bed leveling activés (Bi-linéaire, Mesh leveling ou UBL), vous avez la possibilité de définir une hauteur lissée, c'est à dire que pendant l'impression, Marlin va au fur et à mesure corriger la pièce pour que le défaut du lit ne soit plus visible à partir de X mm (définie via l'écran LCD ou par la commande M420 Z(hauteur). En exagérant, si votre lit est creux au centre, on peut imaginer imprimer une boite ainsi : En rouge en haut le résultat sans la hauteur lissée, en vert ce que donnera l'impression avec la hauteur lissée. Nécessite 1600 octets. Bed leveling via le LCD Ligne 1106 : #define LCD_BED_LEVELING Permet de faire le leveling si vous avez un des modes cités au dessus activé. Si vous avez activé le Mesh Leveling (manuel), Marlin vous guidera étape par étape via l'écan LCD pour faire le leveling. Requiert environ 1 ko. Déplacement de la tête automatique Ligne 1114 : #define LEVEL_BED_CORNERS Depuis l'écran LCD, permet de faire bouger la buse automatiquement pour faire le réglage aux 9 points du plateau en leveling mauel. Nécessite 1200 octets. Fonctions additionnelles Préchauffage J'ai lu encore récemment qu'on pouvait gagner de la place en commentant les fonctions de préchauffage de PLA et ABS. Bien que je les trouve utile, voilà comment gagner 40 octets. Oui, pas un de plus, 40... Commentez les lignes 1262 à 1268 : #define PREHEAT_1_TEMP_HOTEND 210 #define PREHEAT_1_TEMP_BED 60 #define PREHEAT_1_FAN_SPEED 0 // Value from 0 to 255 #define PREHEAT_2_TEMP_HOTEND 235 #define PREHEAT_2_TEMP_BED 80 #define PREHEAT_2_FAN_SPEED 0 // Value from 0 to 255 Il vous faudra également commenter ces lignes dans le fichier configuration_store.cpp, à la ligne 1820 : #if ENABLED(ULTIPANEL) lcd_preheat_hotend_temp[0] = PREHEAT_1_TEMP_HOTEND; lcd_preheat_hotend_temp[1] = PREHEAT_2_TEMP_HOTEND; lcd_preheat_bed_temp[0] = PREHEAT_1_TEMP_BED; lcd_preheat_bed_temp[1] = PREHEAT_2_TEMP_BED; lcd_preheat_fan_speed[0] = PREHEAT_1_FAN_SPEED; lcd_preheat_fan_speed[1] = PREHEAT_2_FAN_SPEED; #endif Notez que mes valeurs ne sont plus celles par défaut. Plutôt que de les virer, j'ai renommé 'ABS' en 'PETG' dans les fichiers de langue, bien plus utile que de tout supprimer pour gagner une misère. Je ne recommande absolument pas de toucher aux fichiers cpp, à vos risques et périls. Modifier les valeurs de l'EEPROM Ligne 1230 : #define EEPROM_SETTINGS Permet depuis votre PC relié à l'imprimante ou l'écran LCD de modifier la vitesse max, accélérations, jerk, steps/mm, offset Z etc etc Si vous êtes certains de ne plus toucher à ces réglages ou de flasher à chaque fois votre imprimante pour les modifier, vous pouvez commenter cette ligne afin de libérer 5.7 ko Récupérer les valeurs de l'EEPROM Ligne 1231 : #define DISABLE_M503 Pour gagner 2800 octets, il faut ACTIVER (ne pas commenter) cette ligne. Permet depuis un terminal de récupérer les paramètres de l'EEPROM (accélération, vitesses, steps/mm, ...). Nettoyage de la buse Il existe une fonction permettant avant chaque print de nettoyer la buse en l'envoyant à un point spécifique de votre plateau (ou légèrement en dehors). Voilà par exemple la réalisation de notre ami @Jean-Claude Garnier qui envoie sa buse se faire polisher sur une brosse à dent : Pour l'activer, ligne 1328 : #define NOZZLE_CLEAN_FEATURE Nécessite 1.7 ko Carte SD Pour ceux qui n'impriment que via PC ou Raspberry, sachez qu'il est possible de désactiver le support de la carte SD. Commentez la ligne 1433 : //#define SDSUPPORT Cela vous libérera presque 17 ko dans la carte de l'imprimante, mais impossible d'utiliser la carte SD.. Pour les extrêmes Encore une fois, si vous n'imprimez que depuis le port USB de votre imprimante, il se peut que vous n'ayez même pas besoin de l'écran. Par exemple, en désactivant l'écran LCD de mon Anet, ligne 1757 : //#define ANET_FULL_GRAPHICS_LCD Cela me fait économiser 39 ko de mémoire que je peux réutiliser ailleurs. Mais je n'ai plus d'écran, tout se fait depuis le PC ou le Raspberry. Voilà pour le fichier de configuration.h, j'essayerai de faire configuration_adv.h dans les jours à venir. N'hésitez pas d'y aller de vos retours si des passages sont à améliorer, réctifier ou clarifier.
- 14 réponses
-
- 16
-
-
-
- configuration
- marlin
- (et 1 en plus)
-
 Bonjour à tous, Il y a quelque temps, j'avais transformé mon ETX5 en extrusion direct, mais tout cela ne me satisfaisait pas, je me suis donc tourné vers le remplacement de la carte ANET par une SKR V1.4T associé à un écran 35 V3. J'ai repris complétement mon câblage avec bltouch et pilotes moteurs 2209. Je suis arrivé à configurer tout cela avec vscode et marlin V2.1.21. Seulement, voilà, il y a un problème, il m'est impossible de régler la position home ( la buse s'écrase sur le bed, il semble que le bltouch ne détecte rien...), de plus, la tête vient se caler à gauche en grognant et bloque l'imprimante, même problème vers l'arrière avec le bed. J'ai bien fouiné partout sur les forums, mais je n'arrive pas à trouver ou ça coince. Ci-joint mes fichiers config.h, config.adv_h et le firmware compilé. Merci d'avance pour vos réponses (et là, je pense à pomme verte qui m'a déjà beaucoup aidé) Configuration.h Configuration_adv.h firmware.bin
Bonjour à tous, Il y a quelque temps, j'avais transformé mon ETX5 en extrusion direct, mais tout cela ne me satisfaisait pas, je me suis donc tourné vers le remplacement de la carte ANET par une SKR V1.4T associé à un écran 35 V3. J'ai repris complétement mon câblage avec bltouch et pilotes moteurs 2209. Je suis arrivé à configurer tout cela avec vscode et marlin V2.1.21. Seulement, voilà, il y a un problème, il m'est impossible de régler la position home ( la buse s'écrase sur le bed, il semble que le bltouch ne détecte rien...), de plus, la tête vient se caler à gauche en grognant et bloque l'imprimante, même problème vers l'arrière avec le bed. J'ai bien fouiné partout sur les forums, mais je n'arrive pas à trouver ou ça coince. Ci-joint mes fichiers config.h, config.adv_h et le firmware compilé. Merci d'avance pour vos réponses (et là, je pense à pomme verte qui m'a déjà beaucoup aidé) Configuration.h Configuration_adv.h firmware.bin -
marlin Connaître la version de son Marlin
Guillaume3D a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour à tous, Ca fait déjà un petit moment que j'ai mis de côté l'impression 3D mais j'essaye de retrouver parmis les tréfonds de mon ordinateur la version du Marlin qui tourne actuellement sur mon imprimante 3D (je n'ai pas mis le nom de la version sur le dossier). J'ai environ 5 marlin différends et je n'arrive pas à savoir lequel est le bon, vu que la dernière modification que j'ai faites date d'il y a 2 ans (01/03/20 m'indique le gestionnaire de fichiers, le temps file à une vitesse ) Je sais que j'utilise la version 2.0.1 (j'avais modifié la 2.0.5 mais je ne sais plus pourquoi je ne l'utilise pas ) alors j'essaye de retrouver parmis les fichiers du marlin la version. Dans "version.h", il est écrit "2.0.x" malheuresement, donc pas plus d'infos. Dans quels fichiers puis-je retrouver le numéro de version ? Merci à tous, et au plaisir de faire un saut sur ce forum qui m'a accompagné durant toute ces années ! -
marlin Astuce Impressions centrées
Guillaume3D a posté un sujet dans Paramétrer et contrôler son imprimante 3D
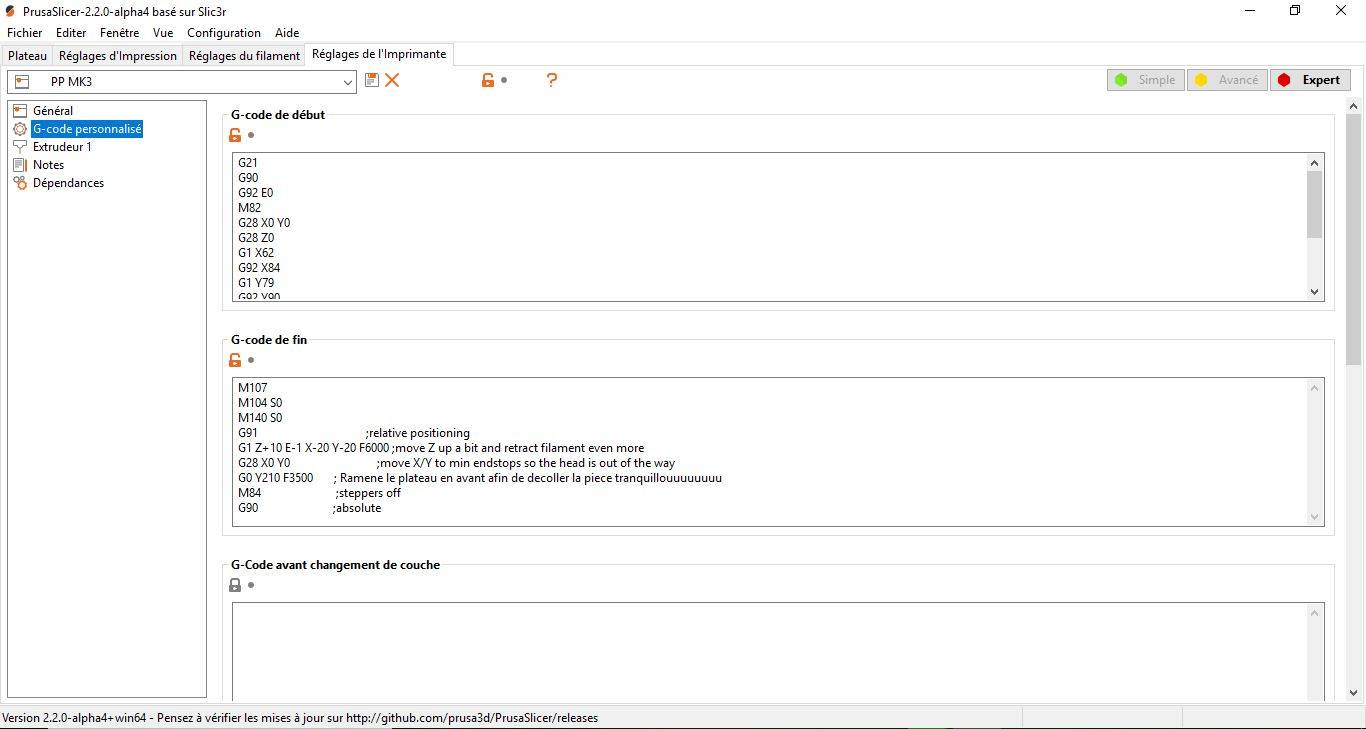
Hello, Je ne sais pas si cette mini-manip a été déjà traité sur ce forums mais la voici: Le but de cette manip est de centrer les impressions sans passer par Marlin. Regler l'offset de mon imprimante sur Marlin n'a jamais marché pour moi, mes points de palpages de l'auto nivellement était toujours mauvais. Avec plusieurs essais, j'ai trouvé que mes points de palpages étaient parfais en mettant zéro offset (0 pour le X/Y/Z), en définissant que la buse était au même endroit que mon capteur de nivellement. Mais le problème était que mes impressions n'étaient pas centré mais toujours décalés sur le plateau... Voici comment corriger ce problème: Ca se passe au niveau du start-gcode: J'avais défini mon Z-Safe-Homing dans Marlin à X=84 et Y=90, mon réel offset étant à X=+22 et Y=+5, mes impressions étaient décalées d'environ 2 cm vers la droite. Pour les centrer voici ce qu'il faut mettre: G1 X62 (aller à 62mm de l'axe X -> nécessaire de le mettre après le G28 X0) G92 X84 (défini que la position +62 est en réalité 84 -> 84 étant la valeur du centre du plateau pour le capteur) G1 Y79 (aller à 79mm de l'axe Y -> nécessaire de le mettre après le G28 Y0) G92 Y90 (défini que la position +79 est en réalité 90 -> 90 étant la valeur du centre du plateau pour le capteur) Avant d'imprimer, après le Z homing, la tête d'impression va se déplacer de la valeur de l'offset vers la gauche et faire avancer le plateau, ce qui va corriger la valeur erroné présente dans Marlin. Je ne sais pas si ça va être utile à quelqu'un mais dans le doute


-

marlin auto level touch mi ender 3 ne focntionne pas
mat57190 a posté un sujet dans Paramétrer et contrôler son imprimante 3D
salut à tous, Probleme: L'auto level se fait mais il n'est pas mémorisé ou pris en compte: suivant l'endroit sur le plateau, soit la 1ere couche est écrasée soit elle est décollée du plateau historique: J'ai acheté un touch mi car le plateau de ma ender 3 pro n'était pas droit. J'ai suivi le tutoriel ici :https://hotends.dozuki.com/Wiki/Capteur_TouchMI J'ai installé le capteur, installé marlin 1.1.9, réglé le Z, modifié dans cura le start code start code dans cura: ; Ender 3 Custom Start G-code G28; home all axes M140 S{material_bed_temper&ature};start heating bed M190 S{material_bed_temperature};wait bed to reach temp before procedding G29; M104 S{material_print_temperature};start heating extruder M109 S{material_print_temperature};wait for extruder to reach temp before proceeding G1 Z0.5; G1 Z15 F6000; Z@15mm;Prime extruder G92 E0; G1 F200 E3; G92 E0 ; Reset Extruder G28 ; Home all axes G1 Z2.0 F3000 ; Move Z Axis up little to prevent scratching of Heat Bed G1 X0.1 Y20 Z0.3 F5000.0 ; Move to start position G1 X0.1 Y200.0 Z0.3 F1500.0 E15 ; Draw the first line G1 X0.4 Y200.0 Z0.3 F5000.0 ; Move to side a little G1 X0.4 Y20 Z0.3 F1500.0 E30 ; Draw the second line G92 E0 ; Reset Extruder G1 Z2.0 F3000 ; Move Z Axis up little to prevent scratching of Heat Bed G1 X5 Y20 Z0.3 F5000.0 ; Move over to prevent blob squish Si je fais G29, j'ai les résultats suivants: Bilinear Leveling Grid: 0 1 2 3 4 5 0 +0.187 +0.111 +0.129 +0.116 +0.159 +0.169 1 +0.075 +0.045 +0.043 +0.032 +0.110 +0.108 2 +0.004 -0.016 -0.028 -0.030 +0.070 +0.104 3 +0.011 -0.028 +0.002 -0.020 +0.050 +0.074 4 -0.010 -0.030 -0.016 -0.013 +0.072 +0.097 5 +0.068 +0.060 +0.069 +0.056 +0.134 +0.174 Quelqu'un saurait pourquoi le nivellement automatique ne fonctionne pas? -
 Bonjour, la sapphire SP-5 est une core XY montée avec 2 moteurs Z reliés par courroie le mosfet du bed a cramé;. j'ai commandé Une CM Robin Nano v3 pour remplacer la Robin Nano v1.2 . il y a 5 TMC225 v4,le processeur STM32F407VGT6 est plus performant que celui de la v1.2 d'origine mais je dois compilé Marlin. j'ai commencé a configurer 'configuration h' mais j'ai besoin d'aide pour arriver a installer toute la nouvelle CM je ne trouve évidemment pas de version précompilé, je me suis lancé dans une amélioration un peu au dessus de mes compétences en programmation. je recois la nouvelle carte sous 8 jours maximum. merci à ceux qui pourrait m'aider. sapphire+.pdf
Bonjour, la sapphire SP-5 est une core XY montée avec 2 moteurs Z reliés par courroie le mosfet du bed a cramé;. j'ai commandé Une CM Robin Nano v3 pour remplacer la Robin Nano v1.2 . il y a 5 TMC225 v4,le processeur STM32F407VGT6 est plus performant que celui de la v1.2 d'origine mais je dois compilé Marlin. j'ai commencé a configurer 'configuration h' mais j'ai besoin d'aide pour arriver a installer toute la nouvelle CM je ne trouve évidemment pas de version précompilé, je me suis lancé dans une amélioration un peu au dessus de mes compétences en programmation. je recois la nouvelle carte sous 8 jours maximum. merci à ceux qui pourrait m'aider. sapphire+.pdf -
Bonjour, Sur ma Ender 3V1, j'ai une carte 1.1.5 qui a fonctionné parfaitement depuis très longtemps. Dernièrement, j'ai eu des problèmes d'extrusion de plus en plus fréquents jusqu'à ne plus extruder du tout, et après bien des investigations, il s'avère que c'est le driver TMC2208 qui est mort. J'ai changé la carte pour une 4.4.7 qui fonctionne mais qui présente des défauts qui ne me vont pas du tout : - Pas de mémorisation des paramètres, ce qui m'oblige à les entrer à chaque nouvelle impression - Gestion de l'affichage sans scroll horizontal empêchant l'affichage des noms de fichiers longs (j'ai tous mes numéros de versions de fichiers dans le nom, et ça peut être long !) - Blocage des moteurs à la mise sous tension pendant un court instant (pas bon pour les moteurs ni pour les drivers) - et bien d'autres petits problèmes d'ergonomie surmontables mais agaçants Sur la carte 1.1.5, j'avais une version Marlin bugfix 1.1.x qui me convenait parfaitement, sur la nouvelle carte 4.2.7 il y a une version Marlin 1.0.1. J'ai essayé d'autres cartes : - Creality 4.2.2 Marlin 1.0.1 - Creality 4.2.7 Marlin 1.0.1 - Cheetah V1.1b Marlin bugfix 2.0.x - Creality 4.2.7 Marlin 0.0.6 Aucune ne mémorise ni affiche correctement mes données. Je sais qu'on peut compiler sa version en utilisant une carte arduino et le système de développement ad hoc, on peut trouver les morceaux de logiciels un peu partout notamment chez Marlin, Github, Creality etc... mais ça reste très aléatoire et très ch...t, surtout pour moi ! L'idée finale étant je crois de mettre un fichier .bin sur une carte SD et de booter la machine dessus pour implanter la nouvelle version. D'où ma QUESTION : Peut-on trouver directement des fichiers .bin avec une config me convenant pour flasher ma carte et enfin qu'on n'en parle plus ? Merci de vos réponses et désolé d'avoir été si long pour ma première intervention.
-

Problème compilation Marlin via VSC
Evad a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour, J'ai beau tout faire comme c'est écrit et j'ai toujours l'erreur : *** [.pio\build\mega2560\src\src\module\temperature.cpp.o] Error 1 Quelqu'un peu m'aider, s'il vous plaît ?