Chercher dans la communauté
Résultats des étiquettes.
1 résultat trouvé
-
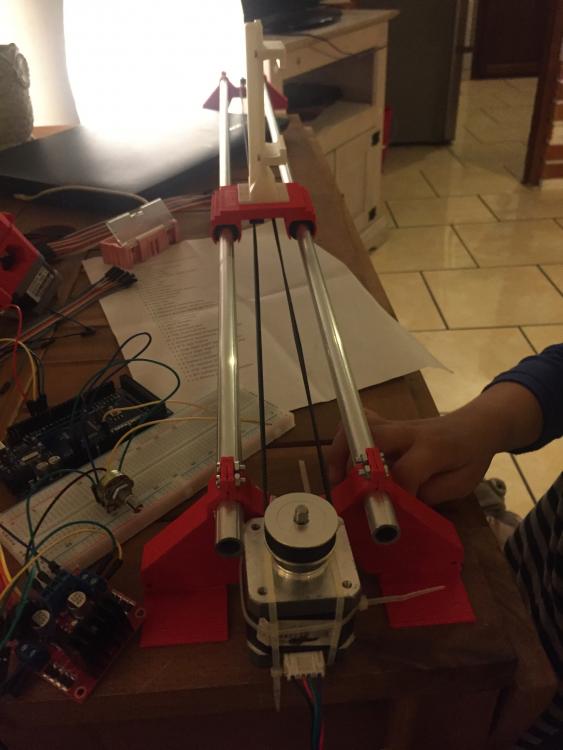
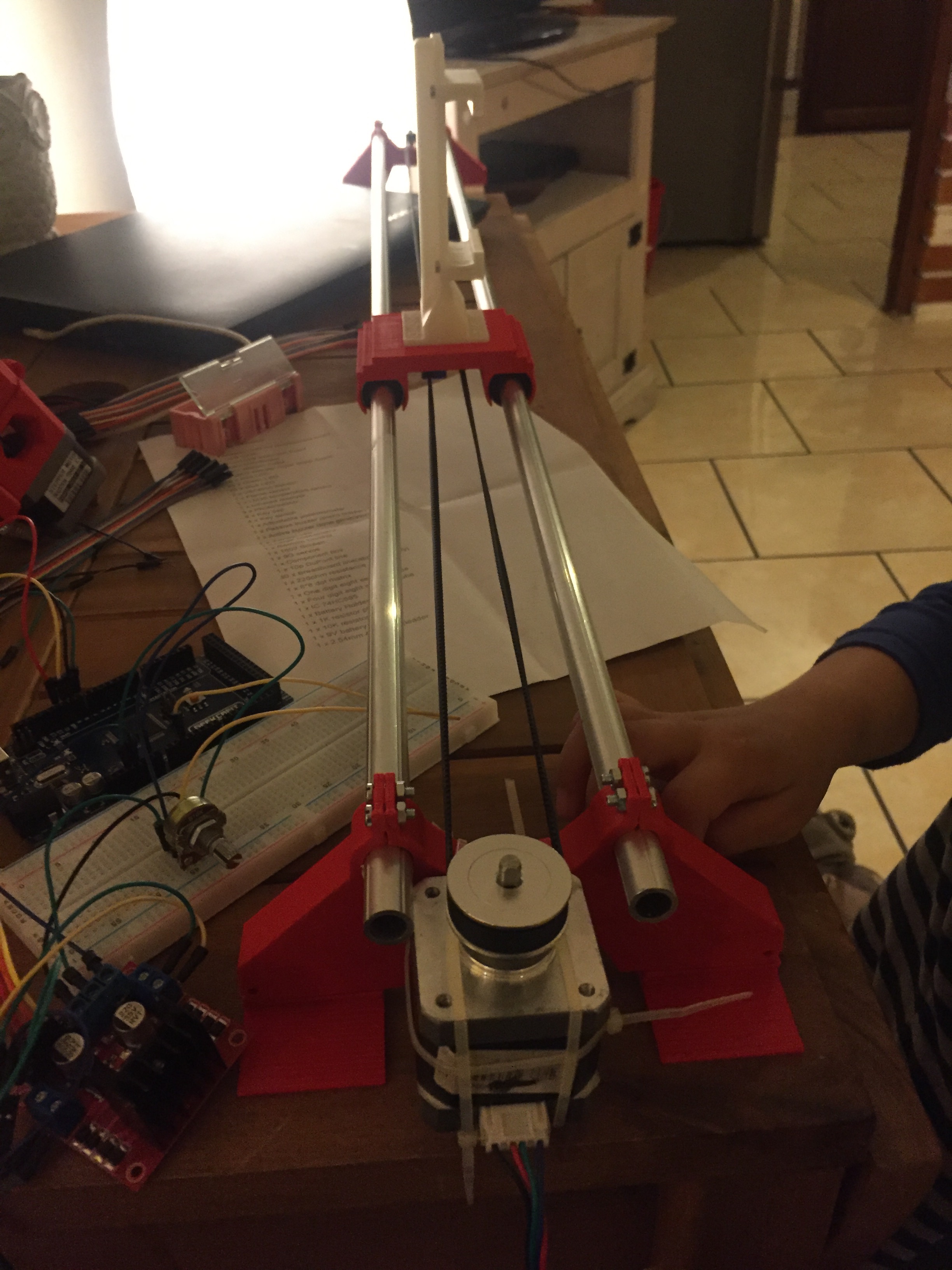
Salut à tous, Je suis en ce moment en train de travailler sur un projet de slider controlé par smartphone. J'ai commencé à créer l'appli qui tourne plutot pas trop mal. J'ai tous les composants du slider et j'ai fait un proto, qui marchait lui aussi pas trop mal... enfin presque. Voilà je suis une quiche en programmation et du coup j'y vais vraiment pas à pas pour ce projet. Le but étant de faire un slider motorisé, capable d'aller trés lentement voir de faire des micros pas à la demande pour du timelpase, mais aussi de pouvoir faire des allers retours à une vitesse donnée. J'en suis à lui faire faire des allers retours à une vitesse donnée. Le soucis, (à part tous les problèmes de conception du proto) c'est que je n'arrive pas à avoir des mouvements fluides avec mes nema 17. Les pas se font par saccades quand je lui rentre une vitesse trop faible. A haute vitesse, toute la structure vibre comme c'est pas possible. Pour l'instant je controle la vitesse avec un potentiométre et le moteur est piloté par un L298N et un arduino Mega. Je n'ai pas encore mis les endstop qui devrait lui permettre de faire les allers retours. Comme je ne m'y connais pas en motorisation j'aimerai savoir... ben comment faire pour que mes moteurs tournent sans saccades et de façon la plus souple possible à basse vitesse quoi. Comme sur mon imprimante par exemple. Pour l'instant le slider fonctionne avec deux tiges aluminium de 12mm et deux LMu12 sur lesquelles est fixé un chariot imprimé. Le nema 17 entraine une courroie via une poulie. Merci de votre attention, Fab