Chercher dans la communauté
Résultats des étiquettes.
-
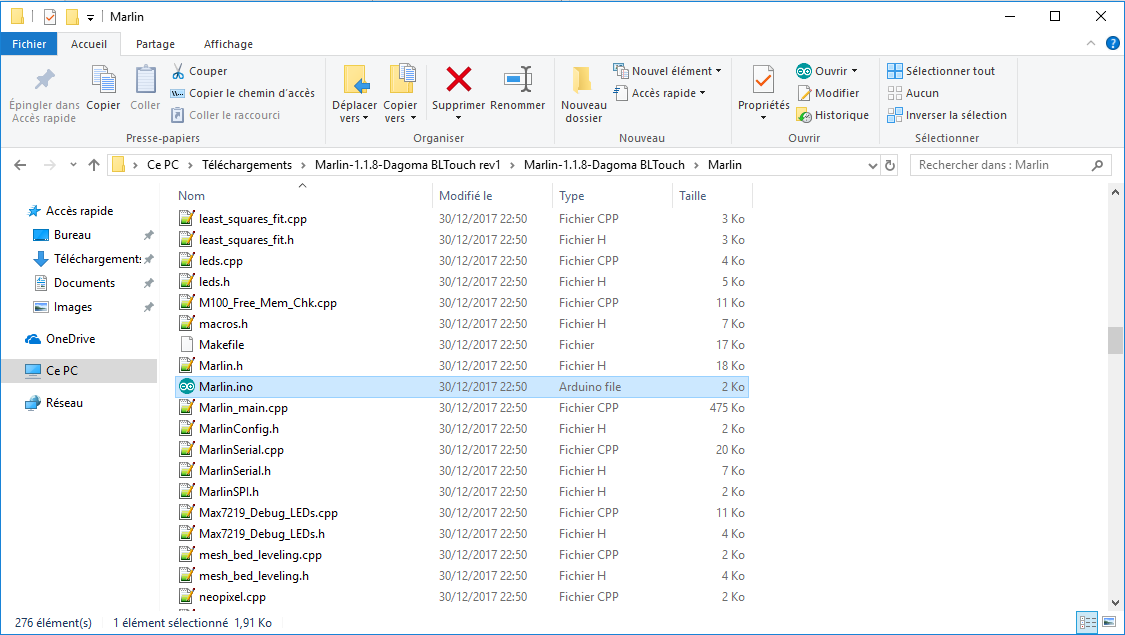
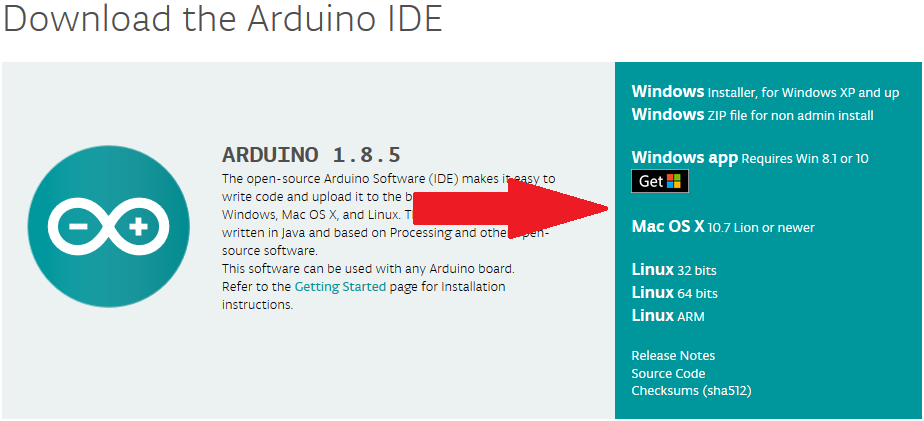
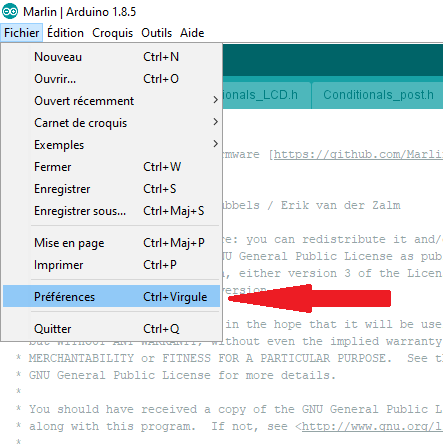
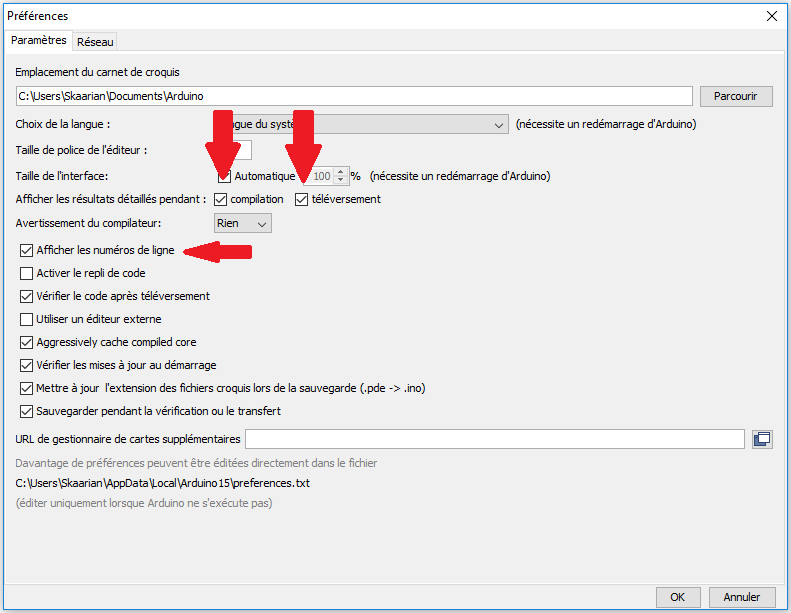
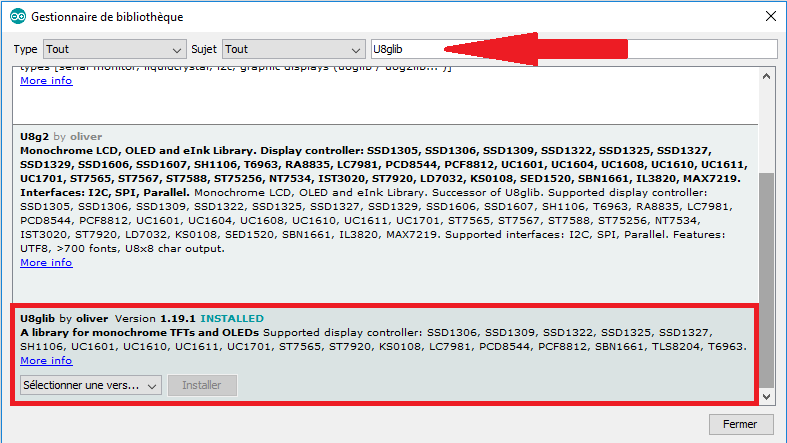
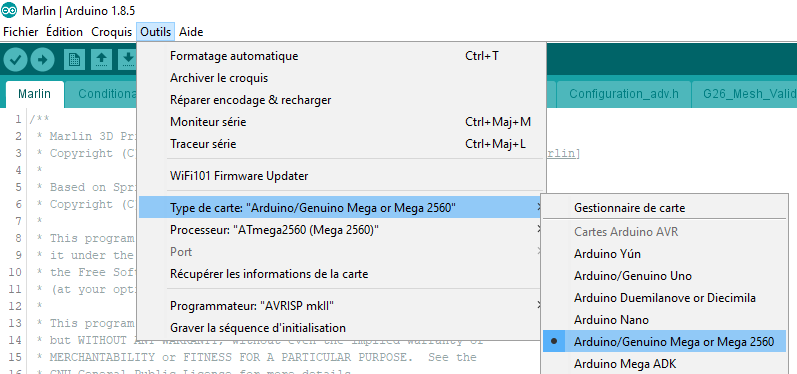
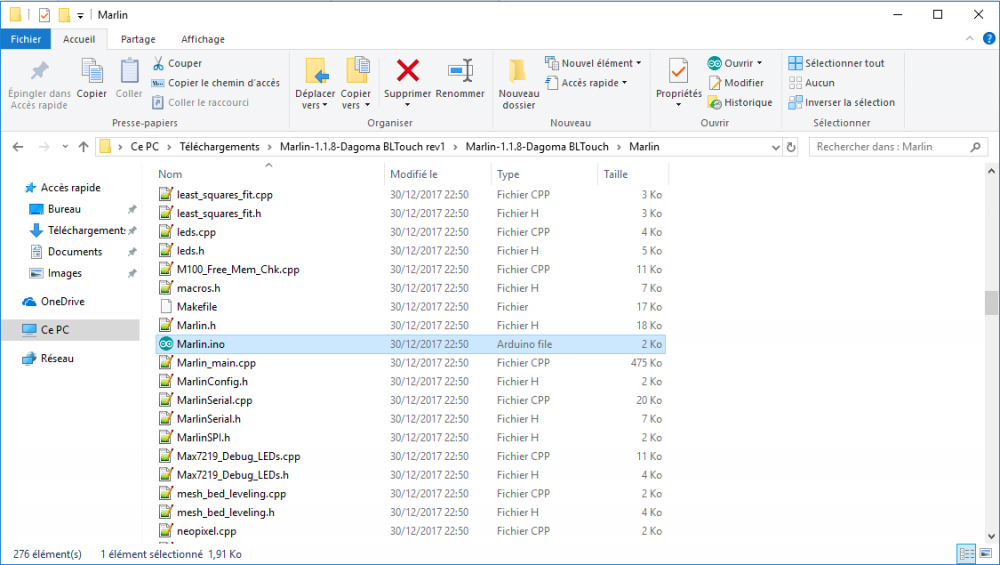
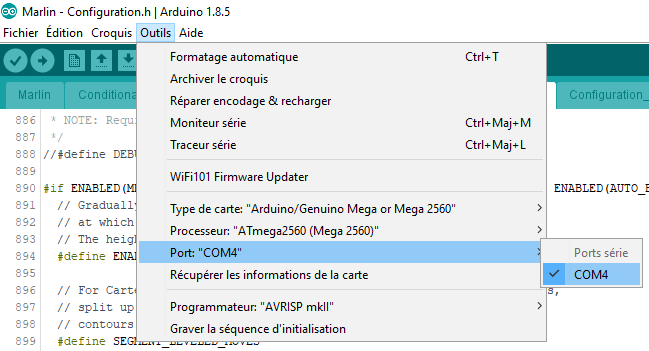
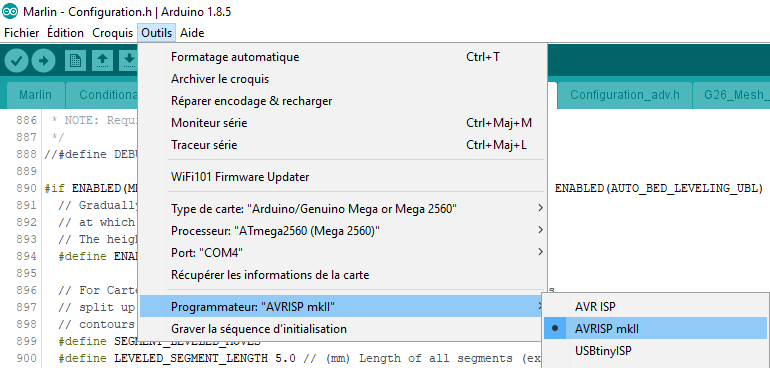
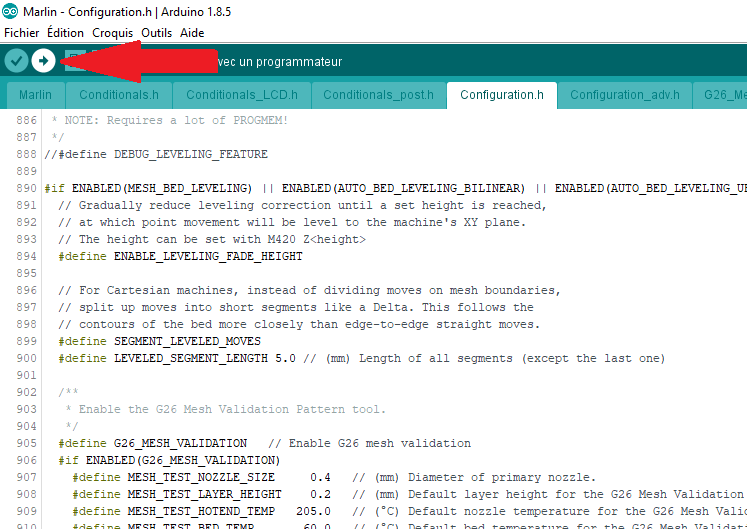
Bonjour, Suite aux nombreux postes des utilisateurs ayants des difficultés à compiler/téléverser un nouveau marlin via le logiciel Arduino sur leur DiscoEasy j'ai préparer ce petit tutoriel. Si vous êtes prêt, on y va... Il y en a pour cinq minutes maximum ! Après vous pourrez modifier comme vous le souhaitez votre DiscoEasy. Installation et configuration d’Arduino : Pour commencer, téléchargez la dernière version d’Arduino ICI . Le logiciel à télécharger ce trouve plus bas sur la page coté droit (voir image ci-dessous ) : Une fois le logiciel téléchargé, rien de compliqué. Installez le en cliquant sur suivant à chaque étape. Une fois l'installation terminée, nous allons passer à la configuration de ce dernier pour qu'il prenne en compte la carte MKS Base de la DiscoEasy. Lancez Arduino, puis allez dans "Fichier/Préférences" ou faites simultanément les touches CTRL + VIRGULE (Voir image ci-dessous) : Une fenêtre s'ouvre ! Afin d'y voir plus claire en cas d'erreur de compilation ou de téléversement, on va activer les résultats détaillés dans les paramètres ! Cochez les cases indiqués par une flèche rouge sur l'image ci-dessous. Une fois terminé cliquez sur "OK" en bas à droite. Maintenant, allez dans "Croquis/Inclure une bibliothèque/Gérer les bibliothèques comme indiqué sur l'image suivante : Une fenêtre s'ouvre. Ici nous allons inclure une bibliothèque manquante et mettre à jour celles déjà installées ci nécessaire ! Commençons par installer la librairie U8glib nécessaire pour marlin qui n'est pas présente dans Arduino après l'installation. Comme indiqué par une flèche rouge dans l'image qui suit, dans l'onglet de recherche écrivez : "U8glib". Cliquez dans la liste sur U8glib by olivier encadré en rouge sur l'image. Cliquez sur le bouton "Installer". Voilà, c'est fait Il est possible que certaine de vos bibliothèques ne soient pas à jour. Pour les mettre à jour, sélectionnez dans le menu déroulant (à gauche du champ de recherche que nous avons vu il y a un instant) "Type" : "Possible de mettre à jour". Si des bibliothèques apparaissent dans la liste, vous cliquez sur chaque une d'entre elle est sur le bouton mise à jour (comme pour installer une nouvelle bibliothèque). Plus qu'une étape et le logiciel est prêt ! A présent, on va indiquer à Arduino pour qu'elle type de carte le compilateur doit fonctionner. Pour ce faire, ouvrez le menu "Outils/Type de carte" cliquez sur "Arduino/Genuino Mega or Mega 2560" comme surligné sur l'image ci-dessous : Puis choisir le programmateur: "AVRISP mkII". Maintenant, ouvrez la version de marlin que vous avez modifié à téléverser en cliquant sur le fichier "marlin.ino": Arduino ouvre le marlin, allumez votre imprimante. Laissez la booter sur le marlin actuel. Une fois le boot terminé branchez le câble USB de votre PC à l'imprimante. Normalement, elle va rebooter une nouvelle fois. Une fois qu'elle a terminée, rendez vous sur le logiciel Arduino déjà ouvert et cliquez sur "Outils/Port:" Sélectionnez le port de communication (Port COM4) sur l'image si-dessous, mais celui-ci peut varier en fonction de votre configuration ! Voilà, tout est prêt ! Cliquez sur le bouton "Téléverser" indiqué par une flèche rouge sur l'image qui suit : Et paf ça fait des chocapics !.... Normalement, il va compiler puis téléverser le nouveau marlin ! Cette opération peut prendre un peu de temps. Pour voir si le téléversement ce fait après la compilation, je vous conseil de mettre le plateau en position arrière. Quand les leds bleus vont s'allumer c'est que le téléversement à commencé ! Une fois le téléversement terminé, l'imprimante va rebooter toute seule !! Elle est prête avec votre nouveau marlin ! PS : Si vous possédez un écran, il faut réinitialiser l'EEPROM. Avec votre molette allez dans le menu : "Contrôler" descendre tout en bas est appuyez sur "Initialiser EEPROM". Bon print !

-

bootloader Flash d’un BootLoader sur un Arduino en se servant du port ICSP...
stef_ladefense a posté un sujet dans Arduino
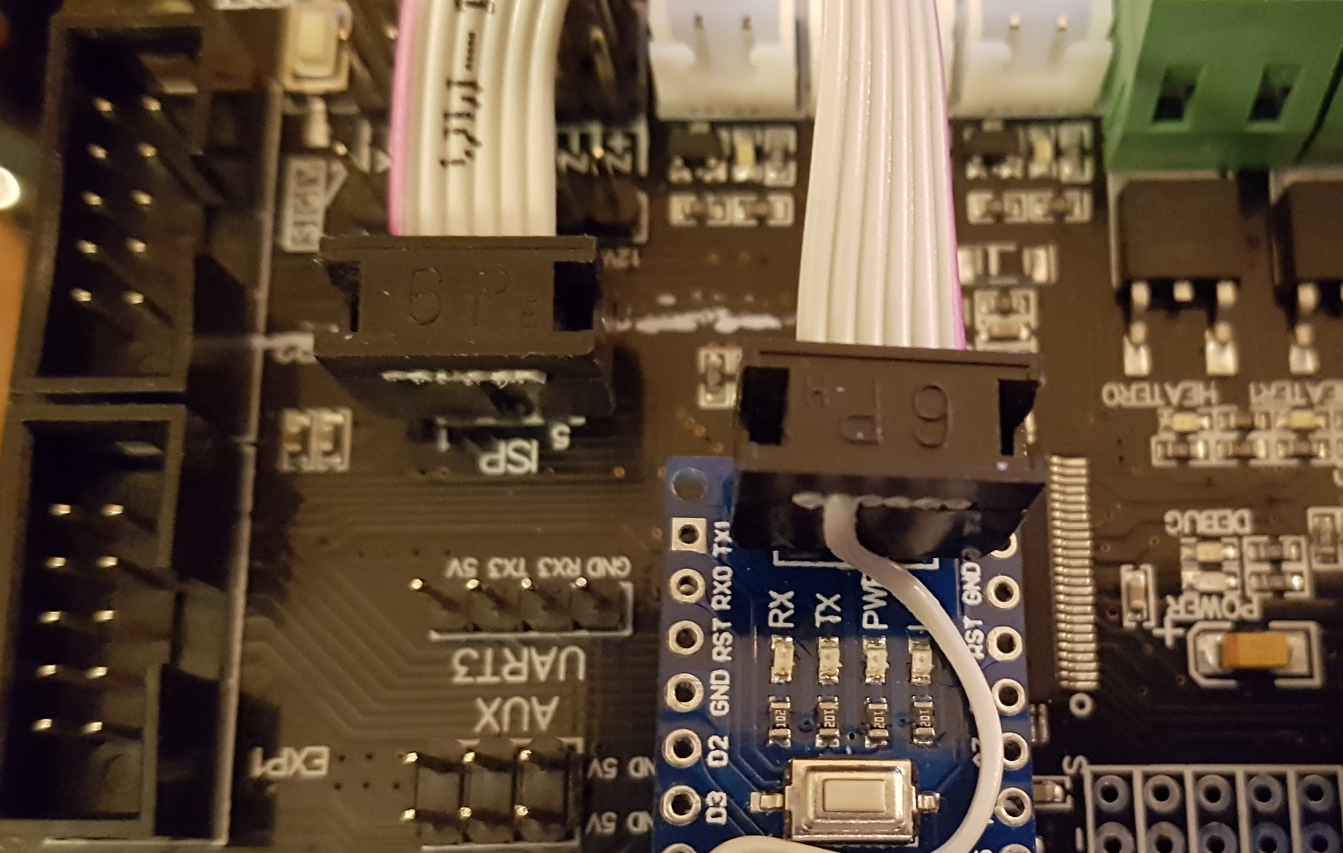
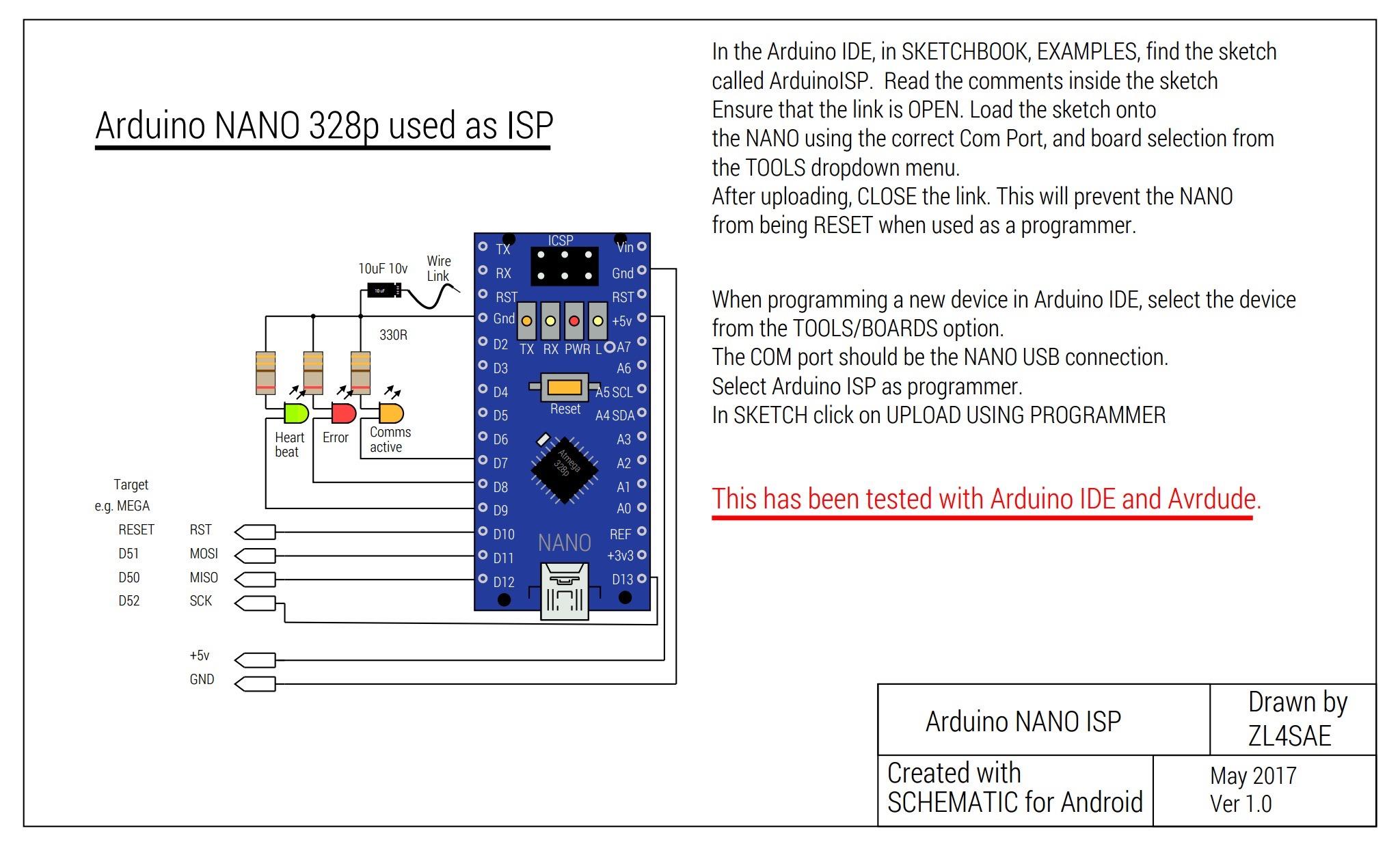
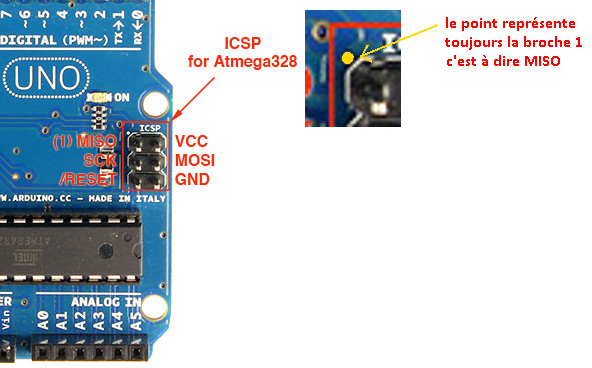
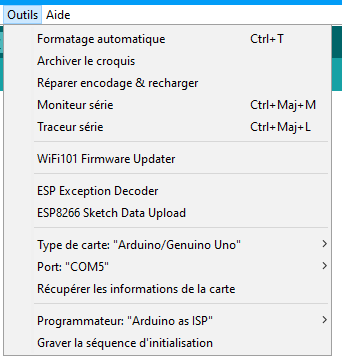
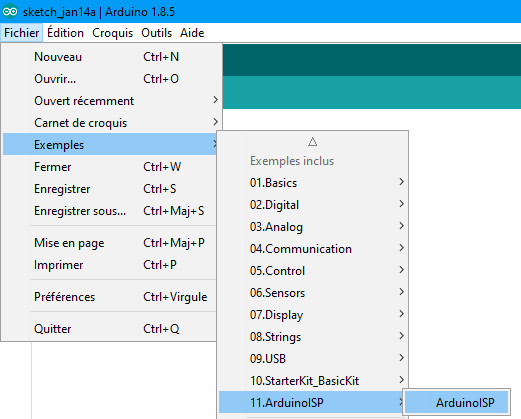
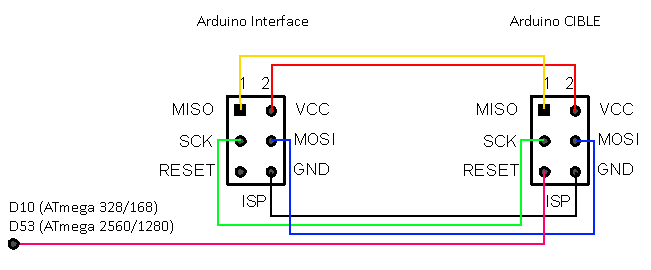
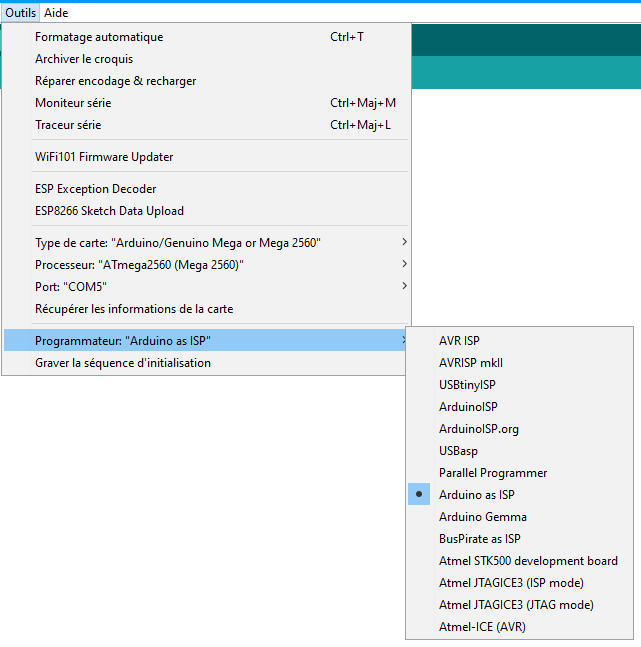
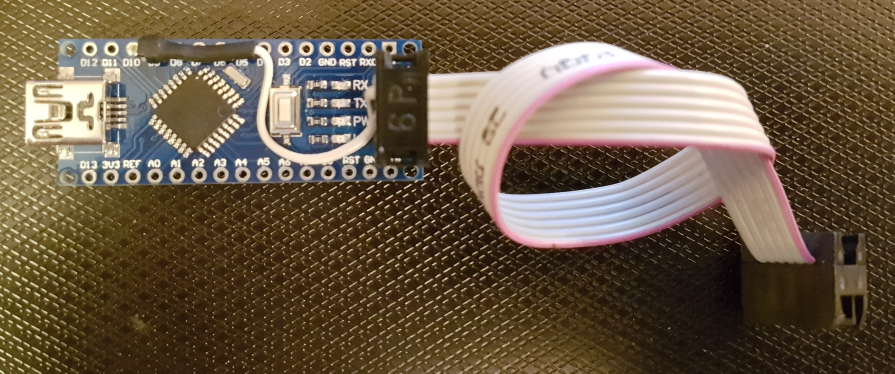
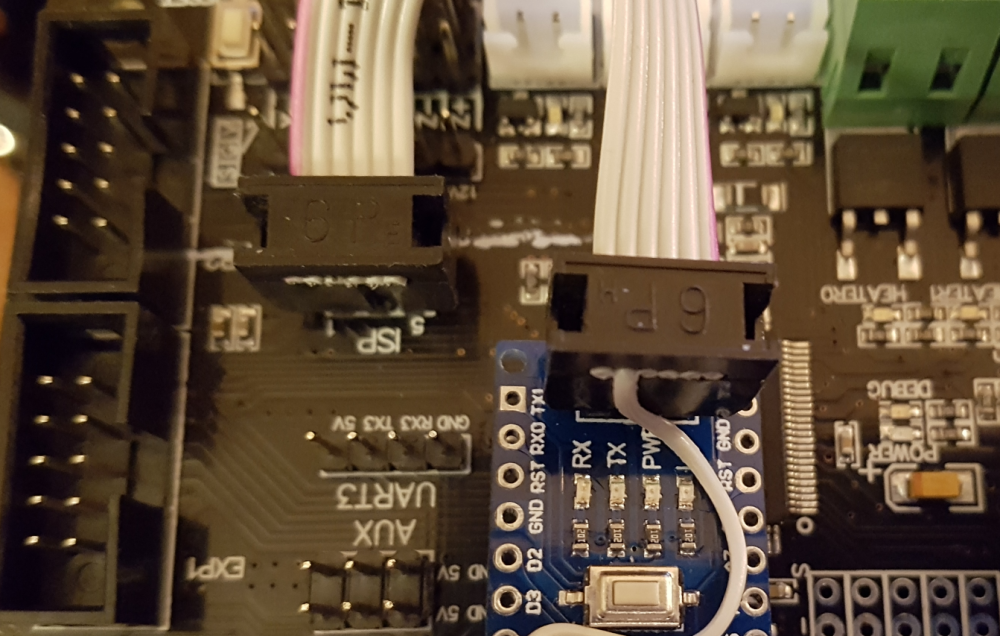
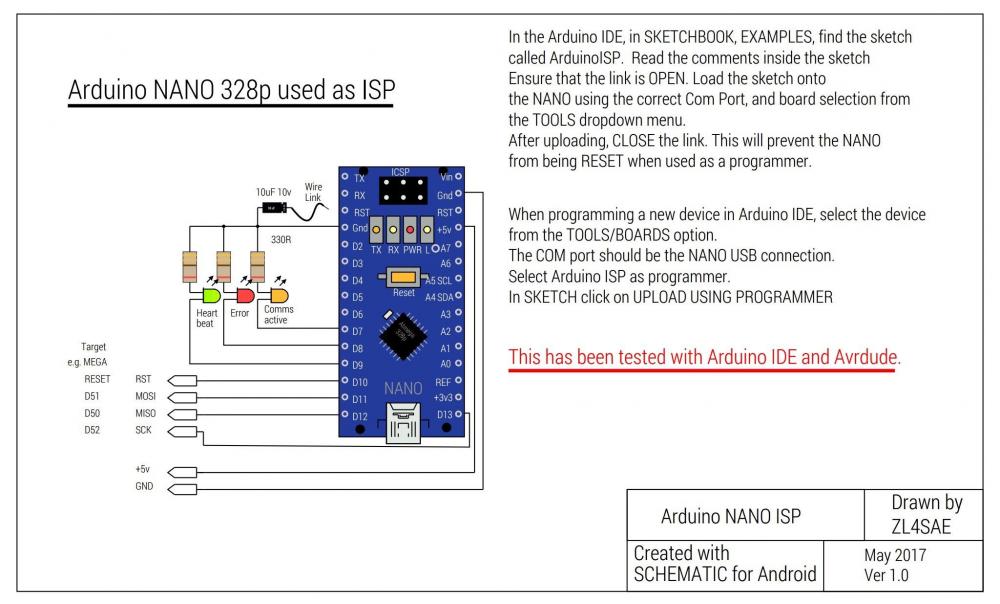
Flash d’un BootLoader sur un Arduino en se servant du port ICSP et d’un autre Arduino transformé temporairement en interface de programmation. J’ai reçu dernièrement une carte contrôleur de type Trigorilla (Anycubic) et impossible de la flasher, aussi bien avec un .hex qu’avec l’IDE Arduino et les sources de Marlin. J’ai parlé de ce soucis dans la session Anycubic et @thsrp m’as posé la question de savoir pourquoi quand on demande à l’IDE Arduino d’exporter les binaires compilés, il générait deux fichiers .hex, un avec le BootLoader et un sans le BootLoader. J’en profite donc pour vous expliquer ça et aussi pour détailler la procédure pour reflasher son BootLoader en utilisant le port ICSP présent sur nos cartes. Ces deux fichiers sont donc destinés à flasher un Arduino sans avoir accès aux sources. Il existe plusieurs solutions pour les utiliser : - En USB (à travers une interface USB/RS232) via Cura, Repetier, … - Via le port ICSP à 6 broches avec une interface spécifique. - Et même en WIFI sur des microcontrôleurs équipés type ESP8266 ou ESP32. La solution de flasher en USB : - soit directement depuis l’IDE Arduino quand on compile les sources (de Marlin par exemple), - ou via Cura, Repetier (ou autres) quand on ne possède que le .hex, nécessite que le BootLoader (BL) de la carte fonctionne correctement et communique avec l’hôte qui envoi les données que le BL écrit dans sa mémoire flash. Donc le cas classique : nous avons par exemple un ATmega2560, avec son BL, branché en USB : Dans cette configuration, peu importe que le .hex ne contienne ou pas le BL, cela fonctionne dans les deux cas, car l’algorithme de transfert du BL ne prends que le programme dans le .hex et jamais le BL interne de l’ATmega ne sera effacé ou remplacé. Ce qui nous arrange bien en fait, pas besoin de se soucier d’avoir un .hex avec ou sans BL. Alors pourquoi générer les deux ? Il existe une autre façon de flasher un ATmega, c’est le fameux port ICSP à 6 broches ! Par exemple sur le composant ATmega neuf, en sortie de chaine de fabrication, il est complètement vide, pas de programme d’amorçage (BL). Hors une carte Arduino par exemple, doit pouvoir être programmé en USB directement, donc on lui implante un BL via ce fameux port ICSP. Un autre exemple, une carte industriel sur laquelle on injecte son firmware via ICSP, si cette carte ne possède pas de port de programmation série, pas besoin de lui charger un BL, la maintenance se fera via ICSP si besoin. Dans le cas où une carte est livrée avec un port de programmation (série ou USB) et en plus avec ses sources (une carte pour piloter une imprimante par hasard), dans ce cas son firmware devra comporter aussi son BL pour que les futurs flashs en USB puissent se faire. En production, l’utilisation de l’ICSP est essentiel pour des raisons de vitesses, pas besoin de compiler à chaque fois la source pour l’implanter. Ce protocole est le SPI. Sur nos cartes Arduino, il se présente sous la forme de 6 picots en 2x3 avec un repère en broche 1. Broche 1 : MISO Broche 2 : VCC 5V (ou 3.3V en fonction des cartes) Broche 3 : SCK (Clock) Broche 4 : MOSI Broche 5 : RESET Broche 6 : GND (masse, 0V) L’utilisation que l’on peut en faire ici, c’est surtout de flasher un BootLoader. Et ça peut être bien utile dans plusieurs cas : Un ATmega vierge (sans BL donc), ou une mise à jour par exemple aux Nano du soleil levant qui sont livré avec le vieux BL, il est intéressant de le mettre à jours pour Optiboot 6.2 par exemple, surtout que c’est maintenant le BL officiel des UNO depuis quelques temps chez Arduino. Mais il peut arriver aussi qu’un programme fasse planter tellement profondément le microcontrôleur que son BL ne puisse plus répondre aux commandes de flash et dans ce cas-là, impossible d’utiliser la connexion USB. La seule solution c’est d’utiliser le port ICSP et de graver sa séquence d’initialisation qui efface la mémoire du composant et lui réinjecte son BL. Pour faire cette manipulation, il suffit d’avoir sous la main un autre Arduino, Uno, Nano, Mega peu importe si ils fonctionnent sous la même tension, ici 5V et avoir quelques fils Dupont pour brancher le tout. Pour la partie software, tout est déjà présent dans l’IDE Arduino. Mise en œuvre : Dans un premier temps, on va injecter un programme pour communiquer avec le port ICSP à l’Arduino qui va nous servir d’interface : ArduinoISP. 1) Dans l’IDE, on commence donc par connecter « l’Arduino Interface » et de choisir son modèle (ici un Uno pour l’exemple) et son port COM dans le menu Outils. 2) On ouvre Fichier, Exemples, ArduinoISP. 3) On téléverse (beurk) (CTRL+U) ce fichier dans « l’Arduino Interface ». Nous avons alors notre « Arduino Interface » programmé avec un émulateur de programmateur ICSP, qu’il faut maintenant relier à la carte cible sur laquelle nous voulons réécrire le BL. Déjà on débranche l’USB, autant éviter les courts circuits. La carte cible n’est pas non plus alimentée ! On va relier les deux connecteurs ICSP de cette manière à l’aide de 5 câbles Dupont : Rien de plus simple, VCC sur VCC, GND sur GND, MISO sur MISO, MOSI sur MOSI et SCK sur SCK. Le 6eme câble est sur la broche RESET de la cible, Et la broche RESET de la cible ne doit en aucun cas être reliée à la broche RESET de l’Arduino servant d’interface !!! Cette broche sera reliée au connecteur D10 sur la Uno ou Nano (ou D53 si il s’agit d’un ATmega 2560 ou 1280). A partir de ce câblage, en aucun cas l’Arduino cible ne devra être alimenté sur son port USB ou Jack d’alimentation ! C’est « l’Arduino Interface » qui alimente la cible ! Nous allons pouvoir « graver la séquence d’initialisation ». Brancher l’USB de « l’Arduino Interface » sur l’ordinateur. Dans l’IDE, choisir le modèle d’Arduino CIBLE (dans l’exemple ici un ATmega2560). Choisir le port COM de « l’Arduino interface ». C’est lui qui est branché en USB sur l’ordinateur ! Et choisir dans Outils / Programmateur : Arduino as ISP Il suffit ensuite de lancer « Graver la séquence d’initialisation » Et en quelques secondes, la cible sera effacée et son BL flashé. Il suffit maintenant de débrancher l’USB, les 6 câbles Dupont qui sont sur son port ICSP. L’ATmega est maintenant vierge et possède son BL. Il est maintenant flashable en USB par les moyens conventionnels. Voilà ! Personnellement je me suis fait cette interface à partir d’un Nano, normalement il est enrobé de gaine thermo mais pour la photo je l’ai retirée. Pour ceux qui se posent la question, la broche 1 est en bas à gauche sur ce nano. J’ai retiré le contact 5 (RESET) dans le connecteur 6 points et laisser son câble plus long pour le connecter sur D10. (Car je le répète, les deux RESET ne doivent pas être reliés entre eux !). Le même in situ pour flasher le BL d’une carte Trigorilla livré sans (merci soleil levant). Le liseré rouge dans mon cas est coté broche 1 sur les connecteurs ICSP. On peut aussi acheter sur eBay pour moins de 10 euros, un programmateur compatible de ce style, ce qui peux être pratique quand on a pas d’Arduino sous la main. Il suffit de le déclarer non plus en « Arduino as ISP » mais en « USBasp », la procédure reste la même. Stef_ladefense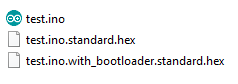



-

firmware Sauvegarder et restaurer son firmware avec avrdudess
fg-35 a posté un sujet dans Discussion sur les imprimantes 3D
Bonjour à tous Pour tous ceux qui se posent la question de sauvegarder l'état de leur firmware avant de faire de le modifier ou de changer de version, j'ai trouvé sur le net un outil bien pratique. Il s'agit d'une interface graphique d'utilisation de l'utilitaire "avrdude" de Atmel (celui qui est utilisé, notamment, par Arduino IDE pour téléverser le firmware sur la carte mère de votre imprimante préférée, dès lors qu'elle est à base de microcontroleur Atmel (comme l'ATmega 2560, par exemple). Cet outil est développé et entretenu par Zak Kemble (cf. http://blog.zakkemble.net/avrdudess-a-gui-for-avrdude/). Il facilite l'utilisation de avrdude tant pour réaliser une sauvegarde binaire du contenu de la mémoire flash (le firmware) et de celui de l'EEPROM (les paramètres utilisés par le firmware) que pour restaurer ces binaires sur la carte mère. En pièce jointe la dernière version pour Windows sous forme d'une archive Zip. J'y ai d'ailleurs ajouté un profil particulier pour la TEVO Tornado. Il suffit d'extraire les fichiers de l'archive et de lancer le programme "avrdudess.exe" avrdudess_20180920-2.zip -
 Je travaille sur un objet en ce moment. C'est un zootrope 3d. J'ai fait la mécanique et l'électronique pour le moteur avec variateur PWM : https://3dminfographie.com/images/impression_3d/test_plateau2.mp4 Et récemment j'imprime des figurines en PLA sur une Elegoo Mars 3 Pro et un support pour l'électronique Cool de pouvoir faire ses propres pièces. Me reste à programmer l'arduino et brancher Le 12V DC pour tester ce stroboscope à leds.
Je travaille sur un objet en ce moment. C'est un zootrope 3d. J'ai fait la mécanique et l'électronique pour le moteur avec variateur PWM : https://3dminfographie.com/images/impression_3d/test_plateau2.mp4 Et récemment j'imprime des figurines en PLA sur une Elegoo Mars 3 Pro et un support pour l'électronique Cool de pouvoir faire ses propres pièces. Me reste à programmer l'arduino et brancher Le 12V DC pour tester ce stroboscope à leds.- 12 réponses
-
- 5
-

-
- arduino
- electronique
- (et 2 en plus)
-
Bonjour à vous les printeur.se.s Je cherche actuellement à rencontrer du monde avec qui partager mes passions, notamment l’impression 3D (sans rire ?), mais aussi l’électronique, la programmation (marlin et arduino principalement) et CAO/DAO (sketchup). Je me fabrique actuellement une CNC sur un châssis QueenBee, ainsi que d’autre divers projets mélangeant ces différentes catégories. Partant de là, je me suis dit que le meilleur moyen de faire des rencontres dans ces domaines est de proposer une sortie afin de se retrouver autour d’un verre, d’une glace, ou d’un feu de camp au milieu de la forêt à 3h du matin (un joueur de gratte est indispensable pour ce dernier point). Niveau date, je pars sur samedi prochain (23/10) courant/fin d’après midi (à fixer de façon définitive). Quant au lieu, je pense qu’on peut trouver un endroit sympa en échangeant sur ce topic. Il y a un parc sympa près de la mer au Minimes (j’ignore comment sera la météo à ce moment là) sinon ça peut être genre dans un McDo, un bar ou un resto (pass sanitaire obligatoire pour ces cas-là). Faites vos propositions L’objectif étant, au delà de se rencontrer, de pouvoir partager nos projets, en parler, et pourquoi pas se lier pour en créer de nouveaux en échangeant nos connaissances respectives. Merci d’avance pour vos retours, j’espère pouvoir vous voir nombreux.ses !
-
Bonsoir tout le monde, je débute dans la programmation Arduino et j'aimerais m'acheter plusieurs cartes Arduino Uno. J'ai remarqué que les cartes les moins chères étaient les CH340, cependant après quelques recherches, plusieurs personnes s'en sont plaintes. Le problème des drivers n'a pas l'aire si compliqué à régler mais j'ai vu une personne qui déplorait la courte durée de vie de ces CH340 en particulier. Quelqu'un aurait-il un retour d'expérience à me faire ? Bonne soirée
-

[Tutoriel] Connexion à une Mega 2560 ou à une GT2560 avec Arduino
Invité a posté un sujet dans Tutoriels et améliorations pour GEEETech
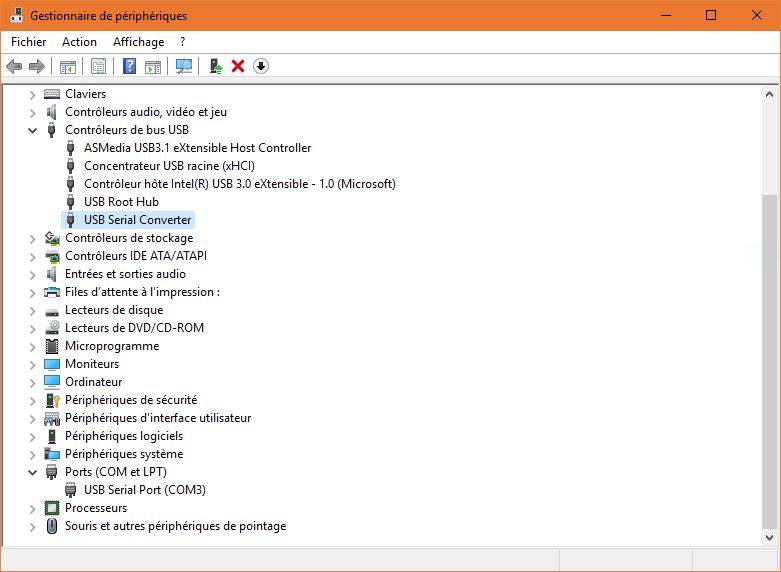
Bonjour. Puisque la question revient assez régulièrement, voici, une fois pour toutes, un tutoriel expliquant, pas à pas, comment se connecter à la carte électronique d'une imprimante 3D GEEETech. C'est écrit pour une i3 Pro C, mais c'est grosso-modo pareil pour les autres modèles. Si vous constatez des différences avec votre imprimante 3D GEEETech, prévenez-moi pour que je puisse mettre le tutoriel à jour en conséquence. Téléchargement des fichiers nécessaires Dans un premier temps, il faut récupérer Arduino 1.0.1. Il est impératif d'utiliser cette version-là avec le firmware fourni par GEEETech à l'heure de l'écriture de ces lignes. L'archive est à télécharger depuis le site officiel d'Arduino. Récupérer les sources du firmware spécifique à votre imprimante 3D est également nécessaire. Les sources sont disponibles sur le forum officiel de GEEETech. Attention : téléchargez le firmware spécifique à VOTRE imprimante. Vérifiez, revérifiez et vérifiez encore. Dans le cas contraire, ni ce forum, ni moi-même, ne pourrions être tenus responsables des dommages infligés à votre matériel. Une fois les archives récupérées, décompressez-les. Vous obtiendrez, d'un côté, un dossier correspondant à Arduino, et de l'autre, un dossier contenant Marlin, le firmware de votre imprimante. Installation des pilotes de périphériques Il faut à présent installer les pilotes de votre imprimante sur votre système d'exploitation. GEEETech en fournit, mais pour une raison qui m'échappe, ils ne fonctionnent pas (parmi les symptômes connus, nous trouvons : impossibilité de téléverser Marlin sur la carte et de se connecter à l'imprimante avec Repetier-Host, Simplify3D ou autres). Branchez votre imprimante en USB sur votre ordinateur et allumez-la si ce n'est déjà fait. Votre système devrait la détecter et vous proposer d'installer les pilotes. Allez les chercher dans le dossier d'Arduino. Ils sont dans un sous-dossier "drivers". Il y a, à priori, deux périphériques à installer : USB Serial Converter, et USB Serial Port (COMx), où x correspond au numéro que Windows aura attribué à votre port COM. Dans mon cas, et pour la suite de ce tutoriel, il s'agira de COM3. Cette donnée sera à adapter selon ce que votre système vous indiquera. Première connexion au firmware de la carte A présent que votre imprimante est reconnue par votre système, nous pouvons nous connecter à l'imprimante et effectuer un premier test. Ouvrez le dossier d'Arduino, et exécutez le fichier arduino.exe. Une interface (relativement spartiate, je vous le concède - mais je vous assure qu'elle est parfaite pour son job) apparaîtra : il s'agit d'Arduino, votre nouveau meilleur ami. Pour commencer, ouvrez le menu Fichier et sélectionnez l'option Ouvrir. Allez à présent chercher, dans le dossier du firmware, le fichier Marlin.ino. Une nouvelle fenêtre Arduino sera ouverte, celle-ci affichera les fichiers correspondant à votre firmware. Ne modifiez rien, c'est fragile. Sélectionnez à présent le menu Outils et, dans le sous-menu Type de carte, sélectionnez la carte Arduino Mega 2560 ou Mega ADK. Et, toujours dans le menu Outils, ouvrez le sous-menu Port série et sélectionnez le port correspondant à celui de votre imprimante. Pour vérifier que tout est au point, cliquez, dans la barre d'outils située en haut de la fenêtre, sur le bouton Téléverser. Arduino compilera alors le firmware, et une fois l'opération effectuée il transférera le firmware sur votre imprimante. Lorsque l'opération aura été effectuée, si tout s'est bien passé, le message Téléversement terminé apparaîtra dans la barre de statut située juste en dessous de la zone d'édition du code. Un souci ? En cas de problème avec cette procédure, créez donc un nouveau sujet dans lequel vous détaillerez ce que vous avez fait, ce que vous attendiez et le résultat que vous avez obtenu. Nous tâcherons dès lors de vous aider. Par souci de clarté, évitez de poster vos problèmes en réponse à ce sujet.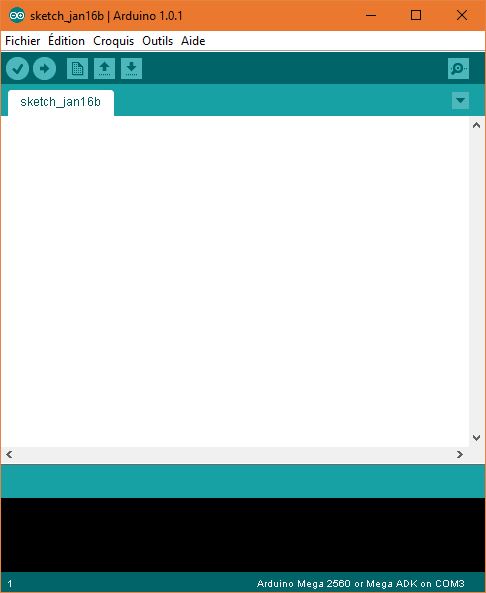

-
Je pense qu il serai judicieux d'ouvrir un nouvel onglet "FirmWare".A ce jour je galère pour compiler Mon Marlin 2.0 . Je vois que beaucoup de personne "ont du mal a compiler leur firmware ...... A mediter !!!
-
Bonjour, Je ne sais pas si je poste exactement au bon endroit, mais je voulais avoir des renseignements sur des moteurs pas à pas de récup. J'ai démonter une vieille imprimante canon s300 et récupéré 2 moteurs pas a pas bipolaire et un moteur continu. Je ne trouve les références nul part pour avoir des infos sur ces moteurs.J'ai repéré les bobinages et je sais qu'ils fonctionne en 27 volts. Les ref sont QH4-4358 et QH4-4354. Si quelqu'un peut me fournir des infos ou tout au moins me dire avec quelle carte je peux les piloter depuis une carte arduino. Merci
-

Erreur téléversage Marlin sur Anet A8
Senso98 a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour, j'ai reçu mon USBasp aujourd'hui mais je n'arrive pas à téléverser Marlin, j'ai cette erreur, je ne sais pas trop quoi faire... Au niveau des paramètres sur Arduino j'ai Anet 1.0 en type de carte, le bon port COM et USBasp en programmateur. J'ai débranché tout les shields sur ma carte, il ne reste plus que le cable USB, l'alimentation et l'adaptateur du USBasp. Si quelqu'un à une piste ça m'aiderait grandement ahah !!! merci -

Clip & block : un kit à imprimer pour vos montage électronique
tedour a posté un sujet dans Projets et impressions 3D
Je me permet de reproduire ici un lien vers un article que j'ai écrit autour d'un projet sur lequel je travaille depuis quelque temps déjà : https://linuxfr.org/news/clip-block-un-kit-pour-du-montage-electronique Clip & block est un kit de construction libre (CC By‑SA 4.0) qui permet de créer des structures solides avec une imprimante 3D pour les projets électroniques basés sur Arduino. Il se compose de pièces qu’il est possible d’assembler et de démonter facilement pour ajouter et retirer différents composants. Bien qu’il soit utilisable, c’est la première fois que je documente ce projet, il est donc en développement. Vous pouvez voir quelques exemples de réalisations à la fin de cette dépêche. Démarrer avec Clip & block en une heure Imprimer votre premier Clip & block J’ai conçu Clip & block pour que ce soit simple à imprimer (pas de support, possibilité de l’imprimer dans tous les sens, pas trop de précision nécessaire, car les formes sont simples). Commencez par cloner le projet sur GitLab. Première étape, vous allez imprimer vos deux premières pièces, un clip et un bloqueur. Pour les pièces : aller dans le répertoire basic ; récupérer une pièce I-3.stl ; récupérer une pièce I-4.stl. I-3.stl → la lettre I désigne la forme de la pièce, le chiffre 3 indique le nombre de trous. Pour le clip et le bloqueur : aller dans le répertoire clips ; récupérer un blocker-2.stl (de préférence, le mettre à plat, cela se fait très bien avec Cura) ; récupérer un clip-2.stl (comme pour le bloqueur, le mettre à plat, en le tournant à 90°). Le chiffre 2 indique la hauteur du clip (assemblage de deux pièces). Le blocker-2.stl va fonctionner avec le clip-2.stl. Notez qu’il ne faut pas beaucoup de plastique pour ces pièces de base (2 g et 0,83 m avec mes réglages pour ces quatre pièces). Après plusieurs essais, cette taille (9,6 mm × 9,6 mm × 4,8 mm) m’a paru être un bon compromis. Plus petit, les manipulations deviennent difficiles (mais peut‑être qu’il faudrait que je teste à nouveau en 6,4 mm × 6,4 mm × 3,2 mm). Vous pouvez maintenant assembler ces pièces ! Pour démonter, il faut pousser le bloqueur par l’autre côté à l’aide d’un petit outil pointu. Si vous imprimez un deuxième clip et un deuxième bloqueur, vous pourrez apprécier la solidité du montage ! Les différentes pièces Pièces existantes Dans le répertoire basic, vous trouverez un grand nombre de pièces générées (75 à ce jour). Elles sont classées en fonction de leur forme et du nombre de trous qu’elles comportent (en une, deux ou trois dimensions). Pour s’y retrouver, voici quelques exemples : Nom Image Description I-3 I : en long, 3 trous en longueur LF-3-2 LF : en L à plat, 3 en longueur, 2 de l’autre côté L-2-1-1 L : en L, 2 en longueur, 1 en hauteur, 1 en largeur L-2-2-3 L : en L, 2 en longueur, 2 en hauteur, 3 en largeur U-2-2-2 U : en U P-2-2 P : pièce à plat C-2-2-1 C : cube, 2 en longueur, 2 en hauteur, 1 en largeur IR-3 IR : en long, bouts arrondis, (pour des pièces en rotation) IH-3 IH : en long, demi‑hauteur IHR-3 IHR : en long, demi‑hauteur, bouts arrondis Il y a certaines redondances (C et P, par exemple), il faudrait que je fasse le ménage… Créer ses pièces sur mesure Si vous ne trouvez pas votre bonheur dans ces fichiers STL, il est possible de créer, avec OpenSCAD, vos propres pièces assez simplement. Voici par exemple comment créer une pièce P‑2‑3 (pièce à plat en 2 × 3) : ouvrez le fichier clip_and_block.scad modifiez le paramètre model pour le type de pièce à P ; modifiez le paramètre length1 pour la longueur à 2 ; modifiez le paramètre length2 pour la largeur à 3 ; vous pouvez ensuite faire un rendu avec la touche F6 ; et exportez en STL depuis OpenSCAD. Le fichier list-plates.txt et le script generate-plates.py Pour automatiser la génération des fichiers STL, j’ai créé le fichier list-plates.txt qui liste toutes les pièces. Le script generate-plates.py lit ce fichier et lance les commandes OpenSCAD avec les paramètres qui vont bien. Les pièces pour composants électroniques C’est ici la partie intéressante du projet : pouvoir intégrer des composants électroniques dans vos montages. Les composants pris en charge J’ai créé un certain nombre de pièces qui permettent d’inclure des composants. Elles se trouvent dans le répertoire stl/electronic. Voici par exemple les deux pièces qui permettent d’inclure un NodeMCU (j’utilise beaucoup cette carte) : Il existe bien d’autres variantes de ces pièces, avec plus ou moins de trous, des trous d’un seul côté, etc. Voici la liste des composants pris en charge dans Clip & block, cette liste pourra (assez) facilement être étendue : Nom Image Description 18650x2 Batterie holder Alimentation 7,4 V 18650 Batterie shield V3 Alimentation USB + 3,3 V + 5 V + recharge BME 280 Température + pression Breadboard 25 trous Connexion Bouton 14 × 20 Bouton D1 Mini Carte de développement DC Motor with gearbox Moteur à courant continu démultiplié L9110s Driver motor Driver moteur à courant continu NodeMCU Carte de développement OLED 128 × 64 Afficheur OLED SG90 (une seule variante, à améliorer) Servomoteur Simple switch Interrupteur Afficheur TM1637 Afficheur 4 × 7 segments Il existe plusieurs variantes pour chaque composant, je vous laisse les découvrir. Créer ses pièces pour ses composants Vous pouvez créer des pièces pour vos composants. Pour cela, vous devez modéliser la pièce sans trous avec votre modeleur préféré. Ensuite, pour pouvoir ajouter des trous Clip & Block autour, il faut veiller à ce que longueur et largeur soient des multiples de 9,6 mm et que la hauteur soit de 4,8 mm. Vous pouvez ensuite ajouter les trous grâce à OpenSCAD. Créer le fichier STL de son composant Voici par exemple comment j’ai procédé pour l’afficheur TM1637 : j’ai créé une pièce pour le dessus et une pour le dessous pour prendre l’afficheur « en sandwich » ; puis, j’ai créé des bords autour du composant pour obtenir un multiple de 9,6 (ici, 48 mm : 5 trous × 28,8 mm et 3 trous × 4,8 mm). Dessous : Dessus : Ajouter les trous avec OpenSCAD Ensuite, il est possible d’ajouter les trous autour de votre montage grâce à OpenSCAD : ouvrez le fichier clip_and_block.scad ; déposez votre fichier STL dans le dossier import ; modifiez le paramètre model pour le type de pièce à F (Filename) — pour des trous de demi‐hauteur, choisissez FH ; dans le tableau holeArray, entrez les coordonnées de vos trous (il faut tester pour trouver les bons) ; dans le tableau finalRotate, vous pouvez tourner votre modèle final pour qu’il soit à plat ; dans le tableau finalMirror, vous pouvez faire une rotation de votre modèle. Utiliser le fichier list-elec.csv le script generate-elec.py J’ai également automatisé la génération des fichiers STL. J’ai créé le fichier list-elec.csv qui liste toutes les pièces pour composants. Vous pouvez voir dans ce fichier que vous pouvez indiquer toutes les options OpenSCAD. Le script generate-plates.py lit ce fichier et lance la commande OpenSCAD avec les paramètres. Je vais peut‑être fusionner les fichiers list-plates.txt et list-elec.csv prochainement. Mes réalisations Voici ce que j’ai réalisé avec les Clip & blocks — je pourrai, si vous me le demandez, détailler ces projets : Virtual Wall Roomba (mur virtuel pour aspirateur automatique) : sablier électronique (pour ne pas avoir à rappeler l’heure le matin à mes enfants :)) : micro‑tracteur télécommandé (basé sur le projet FF RC-Car) : Ces projets fonctionnent plutôt bien, et je m’en sers régulièrement. Voici pour moi les qualités et les défauts de Clip & block : qualités : solidité, facile de faire des modifications, pas besoin de réimprimer l’ensemble pour les modifications ; défauts : manque de pièces « esthétiques » ou de finition, ou même de sécurité (caches, couvercles, etc.), sécurisation des connecteurs Dupont par des pièces spéciales, organisation des fils. La suite ? J’ai aujourd’hui un peu moins de temps pour m’occuper de ce projet. Cependant, je trouve dommage de le laisser à l’abandon, c’est pourquoi je vous demande de l’aide. Alors, de quoi ai‑je besoin ? Tester La première chose que j’aimerais savoir c’est si ce projet fonctionne chez vous, si cela peut répondre à un besoin (ou le créer ?). Donc, merci de tester en suivant la première partie de cet article ! Quelques idées d’évolutions ajouter des composants (selon vos besoins) ; sécuriser les connecteurs ou créer des passe‑fils ; créer des pièces décoratives ou de finition pour que les produits finals soient plus esthétiques et/ou sécuritaire ; ajouter des éléments de types roue (j’ai déjà travaillé dessus) et engrenage ; faire des manuels avec LDCad ; créer d’autres projets basés sur ce kit. Créer une communauté Jusqu’à maintenant, je n’ai que mon GitLab. Mais je viens de créer un compte Mastodon pour discuter et échanger, si l’on pouvait être deux ou trois, cela dynamiserait les choses. :) -
arduino Erreur lors du téléversage
Senso98 a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonsoir, depuis tout à l'heure j'essaye de téléverser le firmware de base de ma CTC i3 Pro B (ma carte mère est une Anet A8), j'ai tout le temps la même erreur Si quelqu'un a une solution cela m'aiderait grandement -
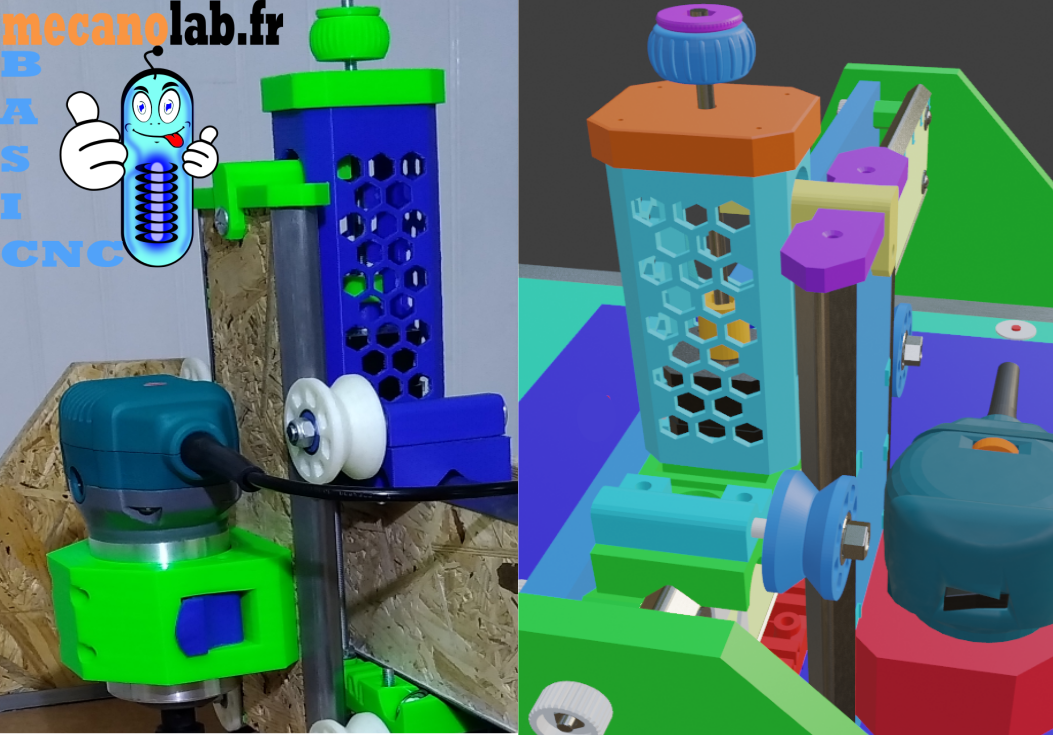
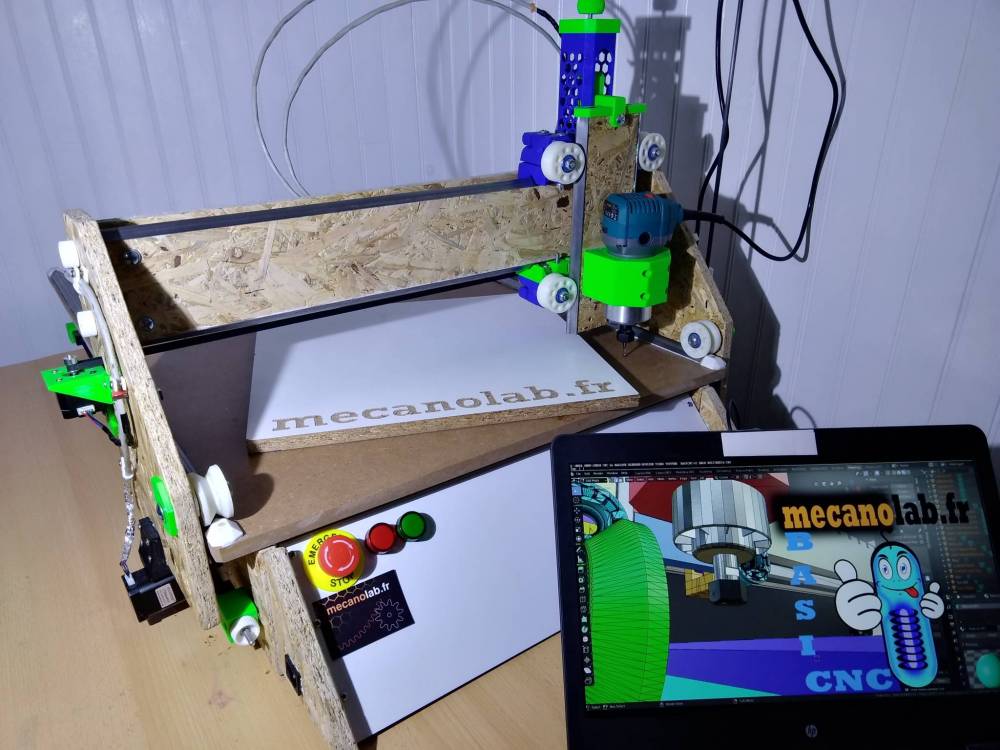
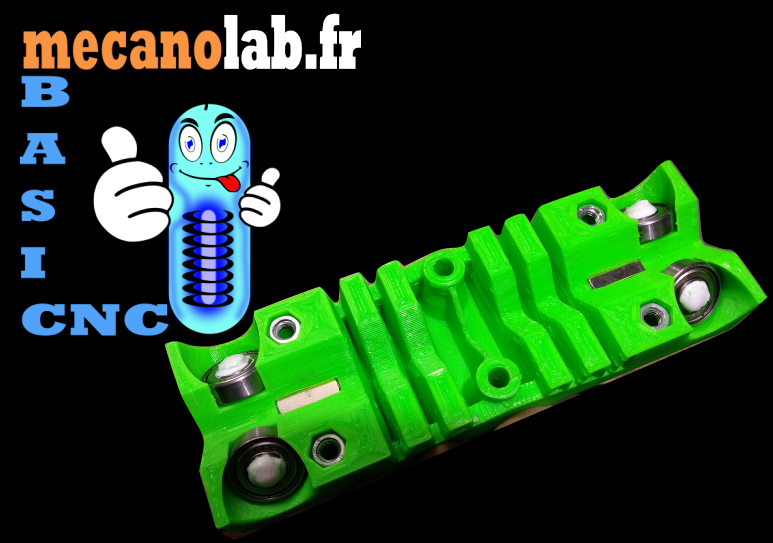
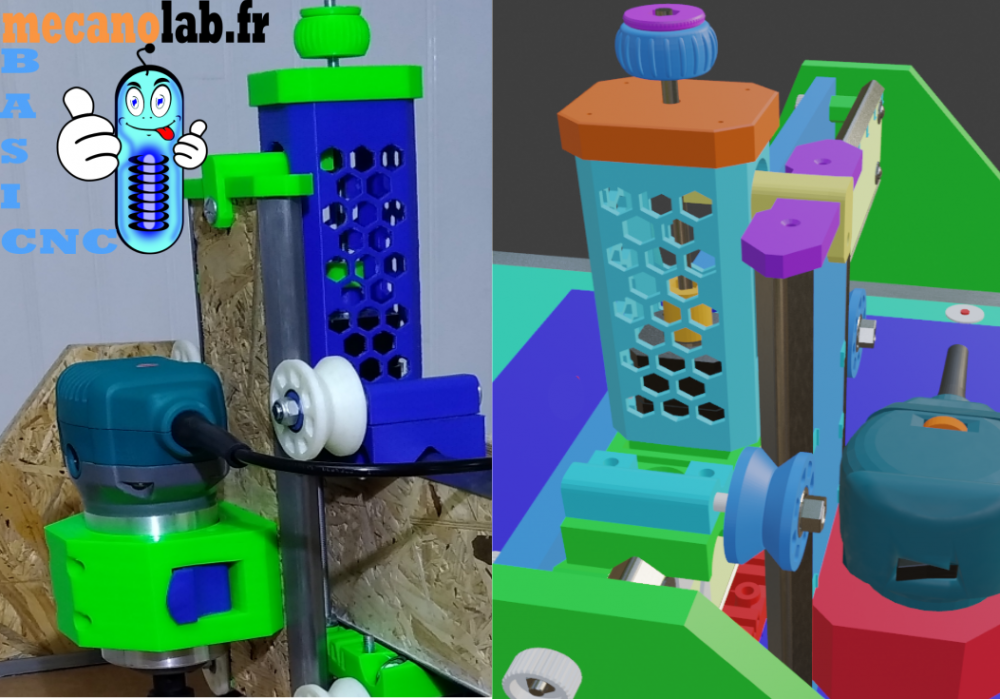
Projets BASICNC by MECANOLAB.FR fabrication DIY d'une fraiseuse 3 axes 700 X500 Z70 moteur NEMA 17,GRBL contrôleurTB6600 et A4988 Cette machine est réalisée avec avec une imprimante 3D et des planches d’OSB. Piloter aves pc ports usb arduino carte CNC Shield + Carte arduino nano et A4988. Soutenez ma chaîne (j’aime et s’abonner) merci. Prochaine vidéo : la suite de la BASICNC car actuellement version bêta!!!!


-
 Hoppla, bonjour à toutes et à tous. Ender 3 de base, Carte Creality V1.1.5, Marlin 2.0, BLTOUCH (original) V3.1, Arduino Uno Voilà, j'ai réussi avec l'arduino à Flasher ma nouvelle carte Creality (qui réduit considérablement le bruit des moteurs). Flashé, car le BlTouch v 3.1, ne fonctionne (à priori) que sur marlin 2.0 J'ai tenté ensuite d'utiliser les fichiers de config spécifique à l'Ender 3 avec le rajout des paramètres du BlTouch et là, je n'arrive même pas à faire accepter à l'IDE de l'Arduino la vérification du script ! J'ai essayé plusieurs fichiers, tutos, ... de plusieurs internautes, réécris moi-même les paramètres 1 par 1 et vérifié. Rien à faire !!! Est-ce que quelqu'un à cette config ? Si oui, comment as-tu fait ??? Ou suis-je trop vieux ? J'avoue, n'avoir passer sur ce problème qu'une quinzaine d'heures, mais .... Noël approche !!! Merci d'avance.
Hoppla, bonjour à toutes et à tous. Ender 3 de base, Carte Creality V1.1.5, Marlin 2.0, BLTOUCH (original) V3.1, Arduino Uno Voilà, j'ai réussi avec l'arduino à Flasher ma nouvelle carte Creality (qui réduit considérablement le bruit des moteurs). Flashé, car le BlTouch v 3.1, ne fonctionne (à priori) que sur marlin 2.0 J'ai tenté ensuite d'utiliser les fichiers de config spécifique à l'Ender 3 avec le rajout des paramètres du BlTouch et là, je n'arrive même pas à faire accepter à l'IDE de l'Arduino la vérification du script ! J'ai essayé plusieurs fichiers, tutos, ... de plusieurs internautes, réécris moi-même les paramètres 1 par 1 et vérifié. Rien à faire !!! Est-ce que quelqu'un à cette config ? Si oui, comment as-tu fait ??? Ou suis-je trop vieux ? J'avoue, n'avoir passer sur ce problème qu'une quinzaine d'heures, mais .... Noël approche !!! Merci d'avance. -
Bonjour tout le monde !Voici mon projet de turret Nerf bluetooth . Je l'ai commencé il y a deja quelques temps et je n'ai pas trop documenté mes avancées jusqu'à maintenant .Je ne pensse pas que le concept sois trop difficile a saisir .On a un chargeur de 8 fléchettes dont les mouvements sont controllés par 2 servos montés sur un trépied .A la base du chargeur on trouve 2 rouleaux entrainés par des moteurs type 130 . Quand la tourelle recoit l'ordre de tirer un servo pousse une des fléchettes dans les rouleaux ce qui la propulse .Le tout est controllé à distance en bluetooth . J'ai créé une appli Android à l'aide du MIT app inventor et aussi un petit logiciel en python pour pouvoir controller la tourelle depuis un PC .Apres avoir imprimé un premier prototype, j'ai du rectifier quelques petits problemes : Voila la 3D final : Le prototype (j'ai enfin réussi a touver un peu de temps pour améliorer mes parametres d'impressions pour que la version finale n'est pas ces especes de traces qu'on voit sur les parties plates ici ) : Dans cette video je montre la modé 3D et explique un peu le fonctionnement : Le prototype en action, encore quelques améliorations a faire au niveau du cablage mais l'appli fonctionne correctement : Ce matin j'ai pu imprimer les versions finales des deux trépieds (une pour servo type MG90S et l'autre pour MG996R) : Tout s'est assemblé sans avoir besoin de limer ou couper quoi que ce soit !!! \o/! Maintenant il n'y a plus qu'a imprimer les 2 versions de parties supérieur et ca sera fini pour l'impression .
-

Affichage vitesse de rotation à partir de la fréquence
Jean-Claude Garnier a posté un sujet dans Arduino
Bonjour à tous Grâce à l'excellent tuto>>> du non moins excellent @stef_ladefense ( ) j'ai pu sauver la vie d'un Arduino Nano que je croivais mort. Il était destiné au départ à animer via GRBL la CNC de mon asso de papis boiseux Cette CNC utilise une broche pilotée par un variateur de fréquence (VFD) YL620, voir ici >> On ne sait pas (ou on a mal vu comment....) afficher une vitesse de rotation sur le display de ce variateur, seulement une fréquence qui va de zéro à 40 000, 40 000 correspondant à 24 000 tours minute. Compte tenu du "public" qui va utiliser cette machine, il serait plus sympa d'afficher une vitesse L'idée serait donc d'utiliser cet Arduino miraculé pour récupérer (mais où ?) cette fréquence, effectuer une règle de Troyes et renvoyer la vitesse de rotation sur un LCD disposé sur la façade du futur boîtier de commande. Une idée, quelqu'un ????
-
La situation : J'ai depuis 2 ans une gt2560 qui fonctionne pas trop mal, sauf qu'elle est pourvue d'un atmel 1280 au lieu d'un 2560 comme prévu. Pas trop grave, juste 128ko de mémoire dispo au lieu des 256ko...bref, cette carte fonctionne avec un marlin 1.1.0 rcbugfix, bref, ca imprime bien, je n'y touche pas. J'ai en cours de construction une imprimante 3D, et j'ai acheté une GT2560 rev A+, commençant a maitriser cette carte qui est pas si mal finalement. C'est là que les ennuis ont commencé... Les problèmes : 1- mon pc est mis à jour avec la dernière version de windows 10, sortie en avril. Avec l'ancienne version, je n'avais pas de soucis, du moins avec la GT2560. Le premier soucis est donc le driver de la carte, puisque windows installe un driver qui ne va pas... 2- Mon USBASP n'est plus reconnu non plus, les drivers zadig ne fonctionnent plus (testé tous les drivers et 2 USBASP différents) 3- la carte GT2560 rev A+ est comme les autres, firmware verrouillé sans bootloader, donc pas possible de modifier marlin... Les solutions : 1-le driver GT2560 rev A+ : Même si dans votre gestionnaire de périphérique, votre carte apparait (branchée en USB) en CH340, il faut passer par ce lien, qui vous donnera les bons drivers à installer, chez moi en l’occurrence le fichier 341, puisque ma carte en est équipée, et non pas d'un FT232. 2 et 3: fatigué de chercher un driver adéquat pour mon USBASP, j'ai eu l'idée de me servir d'un Arduino nano, dispo rapidement sur amazon. Je me suis rappelé que le logiciel arduino disposait d'une option "arduino as ISP". J'ai donc repris les branchements trouvés sur la photo ci-jointe, avec cables dupont. nul besoin de cabler les led....Bien sur, votre arduino nano sera installé avec les bons drivers, normalement pas de soucis à ce niveau. Il faut aller vérifier votre fichier boards dans arduino, chemin : C:\Program Files (x86)\Arduino\hardware\arduino\avr, rechercher et modifier si besoin cette partie mega.menu.cpu.atmega2560.upload.protocol=wiring mega.menu.cpu.atmega2560.upload.maximum_size=253952 mega.menu.cpu.atmega2560.upload.speed=115200 Ensuite, paramétrer le log arduino avec les options suivantes : type de carte atmega 2560, processeur 2560, programmateur arduino as isp, puis cliquer sur burn bootloader, ou graver la séquence d'initialisation en français. J'ai eu des erreurs, mais j'en ai pas tenu compte, puisque la led orange de la carte s'est arrêtée de clignoter. J'ai débranché le nano, pis branché ma carte en USB, alimenté la carte en 12v (des fois nécessaire, des fois non), et injecter le marlin 1.1.8 en passant comme d'hab par arduino en mettant le bon port com. Et là, tout heureux, ca marche, meme si j'ai quelques reglages a faire dans marlin (mon potard notamment, ne marche pas), je suis vraiment fier de moi. Je précise qd même que j'ai rien inventé, j'ai juste trouvé les bons liens sur le net, et compilé tout ça. Je serais content si je peux aider... (à critiquer si besoin...) Tenez moi au courant si ca marche ou pas...
-
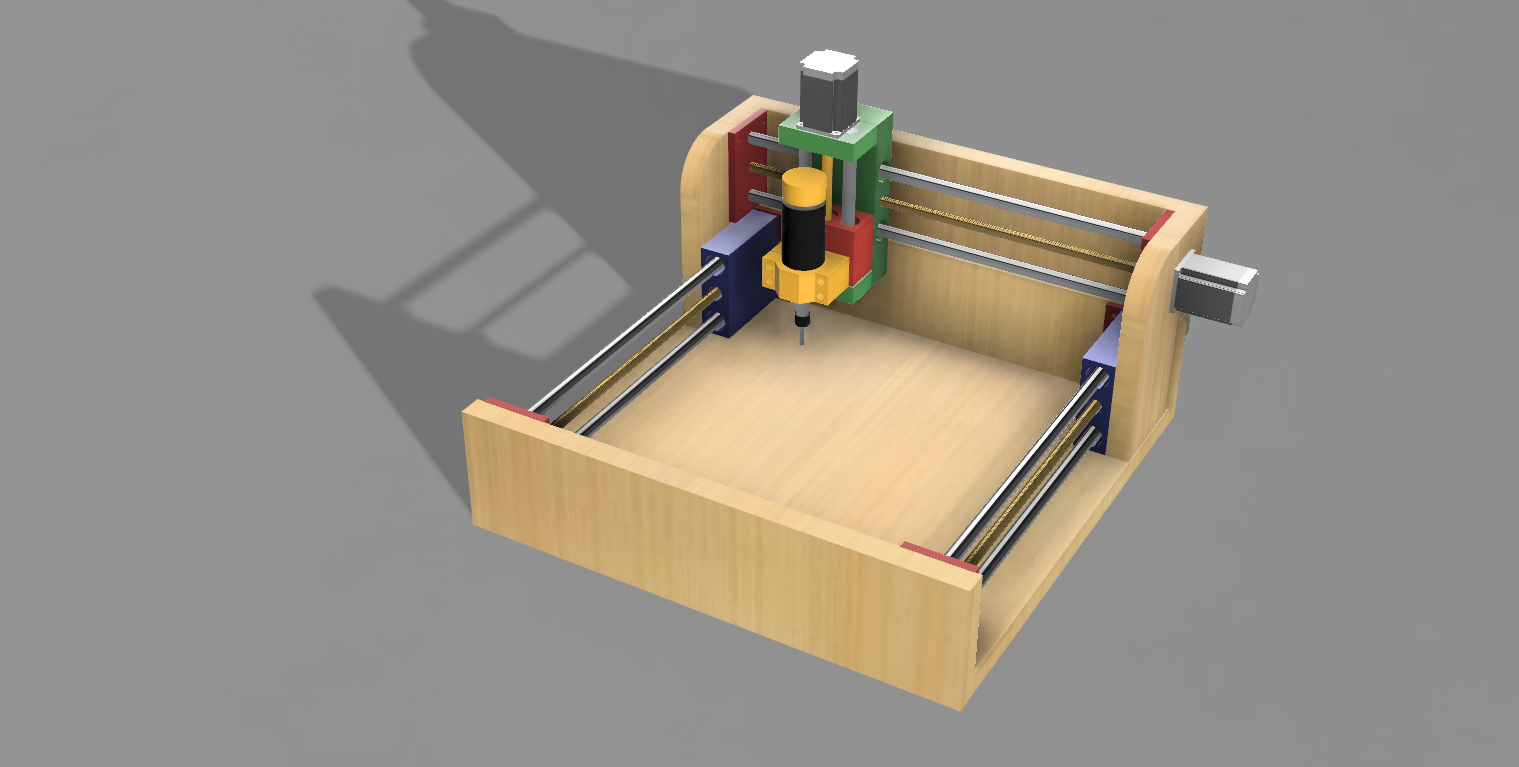
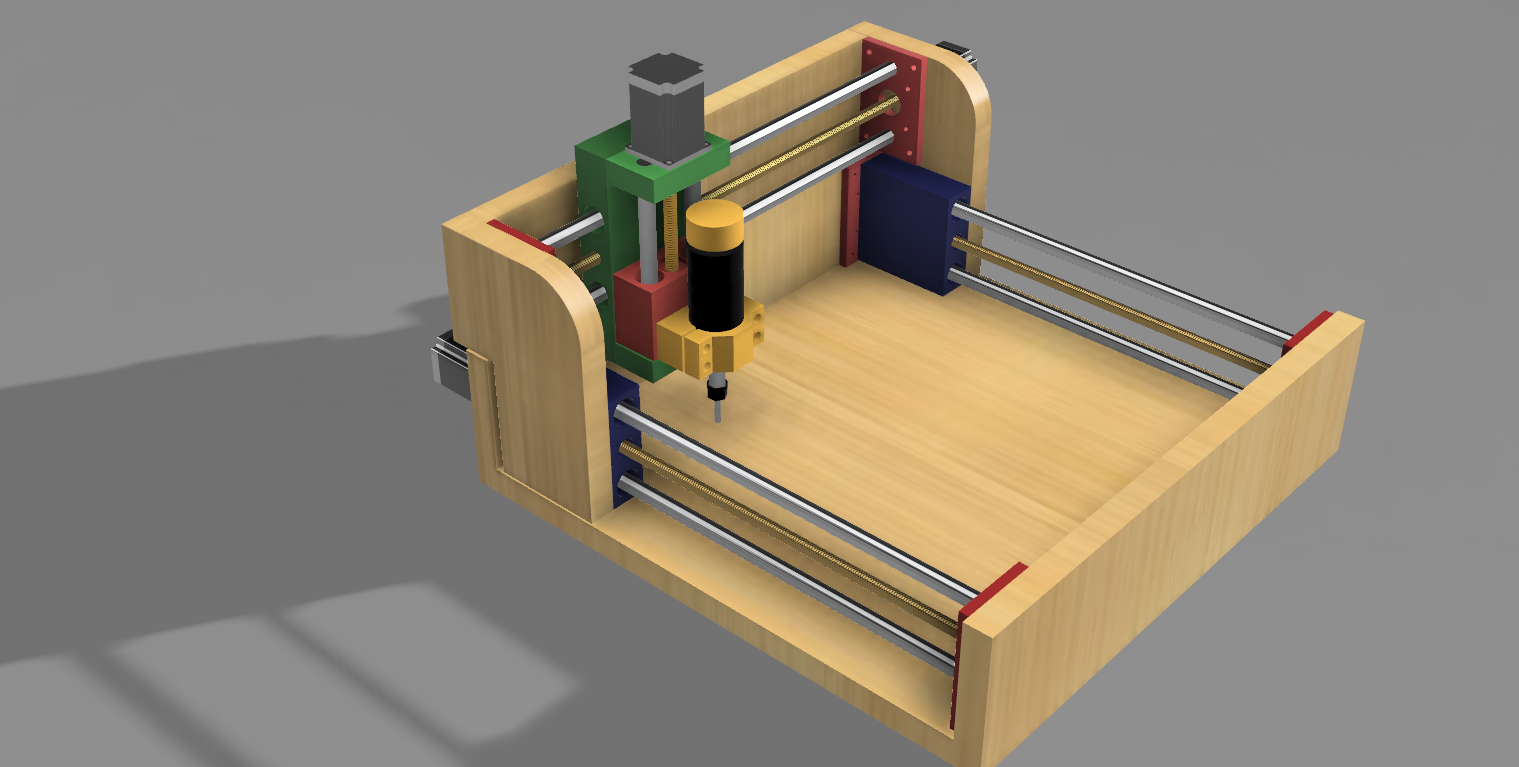
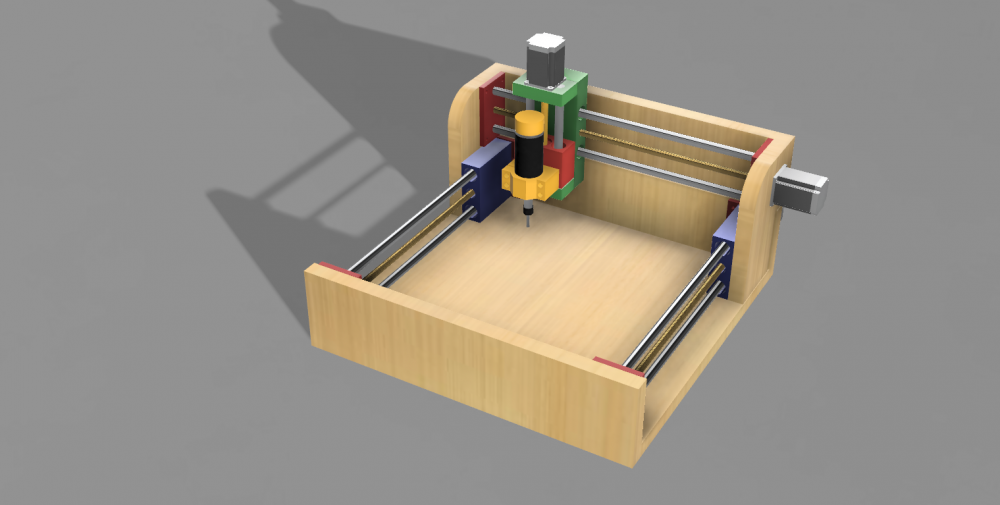
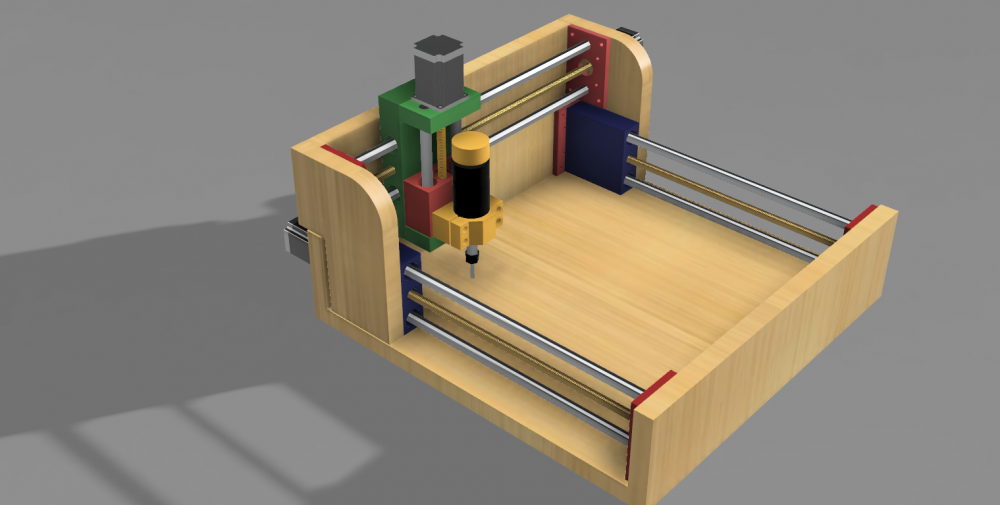
Hello Ça faisait un moment que je tournais autour, comme un rat autour du fromage.... J'avais même commencé à en chercher une d'occase. J'étais allé jusqu'à demander à @Motard Geek s'il voulait pas me vendre sa sienne à vil prix. Et puis là, grâce à (ou plutôt "à cause de") ce diable de @Locouarn venu du pays où il ne pleut que sur les cons.... (coucou Michel !) "à cause de" aussi ce @cmatec, là, qui a bien avancé. Et d'autres encore, j'ai franchi le Rubicon (cherchez pas, c'est du Français....) J'ai regardé avec intérêt les divers projets de Saint Guiveurse et me suis inscrit au groupe Facebook de Nikodem Bartnik >>> , un jeunot qu'a pas les deux mains gauches dans le même sabot. Et voilà, j'ai pété la tirelire... - 4 Nema 23 - 4 drivers TB6600 - arduino + CNC shield - alime 36 Volts - 2 vis trap T12 x 550mm - spindle 12000 rpm ER11 Tout ça arrive à pied par la Chine (celle-là, je m'en lasse pas @fran6p) En attendant, je dessine le mulet sous Fusion 360 J'ai pris le parti de ne pas utiliser des profilés alu, mais du plan de travail épais Ça sera un portique bi-moteur en Y, la table sera fixe. La course sera de 400 x 400 environ, le passage sous portique environ 80mm. Je sais, c'est peu. Comme la structure sera en partie imprimée, en partie "recyclable" je me garde la possibilité de revoir ma copie si ça va pas tout en gardant le matos de base. Voici ce que ça DEVRAIT donner.... On y est pas encore, hein..... Je donne rendez-vous ici à mes "vieux fourneaux" préférés, @rmlc460, @Desmojack, @Artazole, @CacaoTor, @Janpolanton, @Kachidoki, @Tircown, @Philippe Chaumont, @Guizboy, @hidius , @Chevelu37 et d'autres encore qui se reconnaîtront.
-
Voici une camera une camera qui cherche et traques les visage que j'ai réalisé il y a quelques mois et dont je viens de rentre disponible toutes les pieces et codes . La camera est branchée à un ordinateur sur lequel tourne un logiciel de détection de visage . Une fois un visage détecté le logiciel envoie un signal a un arduino situé en dessous de la caméra . Ce arduino pilote 2 servos qui bougeront la caméra en direction du visage détecté . Voici les pieces composants ce robot (OK, j'ai du mal a trouver les réglages qui fonctionne bien avec le filament Verbatim...) : Les pieces sont disponible sur mon site ----> www.littlefrenchkev.com <---- Pour tout ce qui concerne l'assemblage et les réglages et le fonctionnement, j'ai créé quelques videos . Intro : Ce dont vous aurez besoin : Assemblage : Cablage : Réglages et logiciel : Malheureusement je n'ai pas d'image ou de video du développement .
-
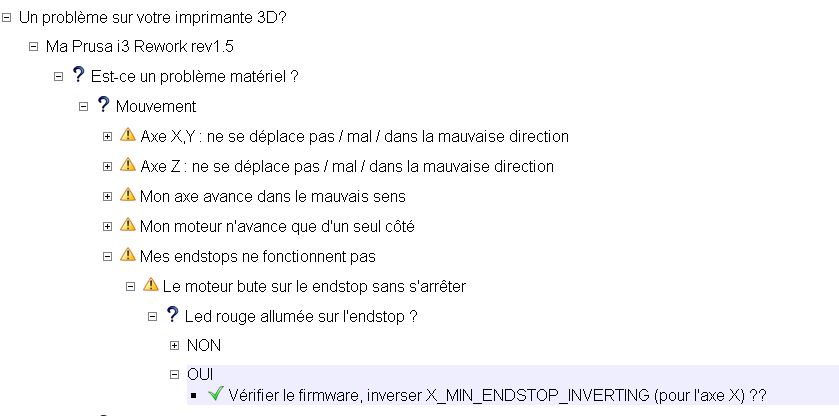
Bonjour a tous, J'ai monté toute mon imprimante 3D Prusa i3 et je peux voir 2 gros problèmes mais je sais pas comment les résoudre. Lorsque je demande a l'axe X d'aller sur l'endstop et de s’arrêter quand la lumière rouge s'allume -> tout marche ! Par contre, quand je demande la même chose pour l'axe Y , quand la plaque touche l'endstop, il y a la lumière rouge s'allume mais la plaque ne s’arrête pas et force sur l'endstop ... Je suis donc allé sur le site reprap pour m'aider et même quand je touche au firmware, le problème persiste... Vous pourrez voir ci joint une capture d'écran de la manipulation que j'ai faite ! De plus, lorsque je demande a l'axe de Z de bouger , rien ne bouge et il n'y a aucun bruit de moteur ni rien.. J'ai vérifié les branchements et pourtant tout est correctement branché.. Voilà, j'attend vos solutions car sa me fait vraiment chier d'avoir payé une imprimante 3D et que je puisse toujours pas m'en servir !! Bonne journée à vous
-

Mise au point Firmwares, EEPROM ...
Murdock a posté un sujet dans Tutoriels et améliorations pour Anycubic
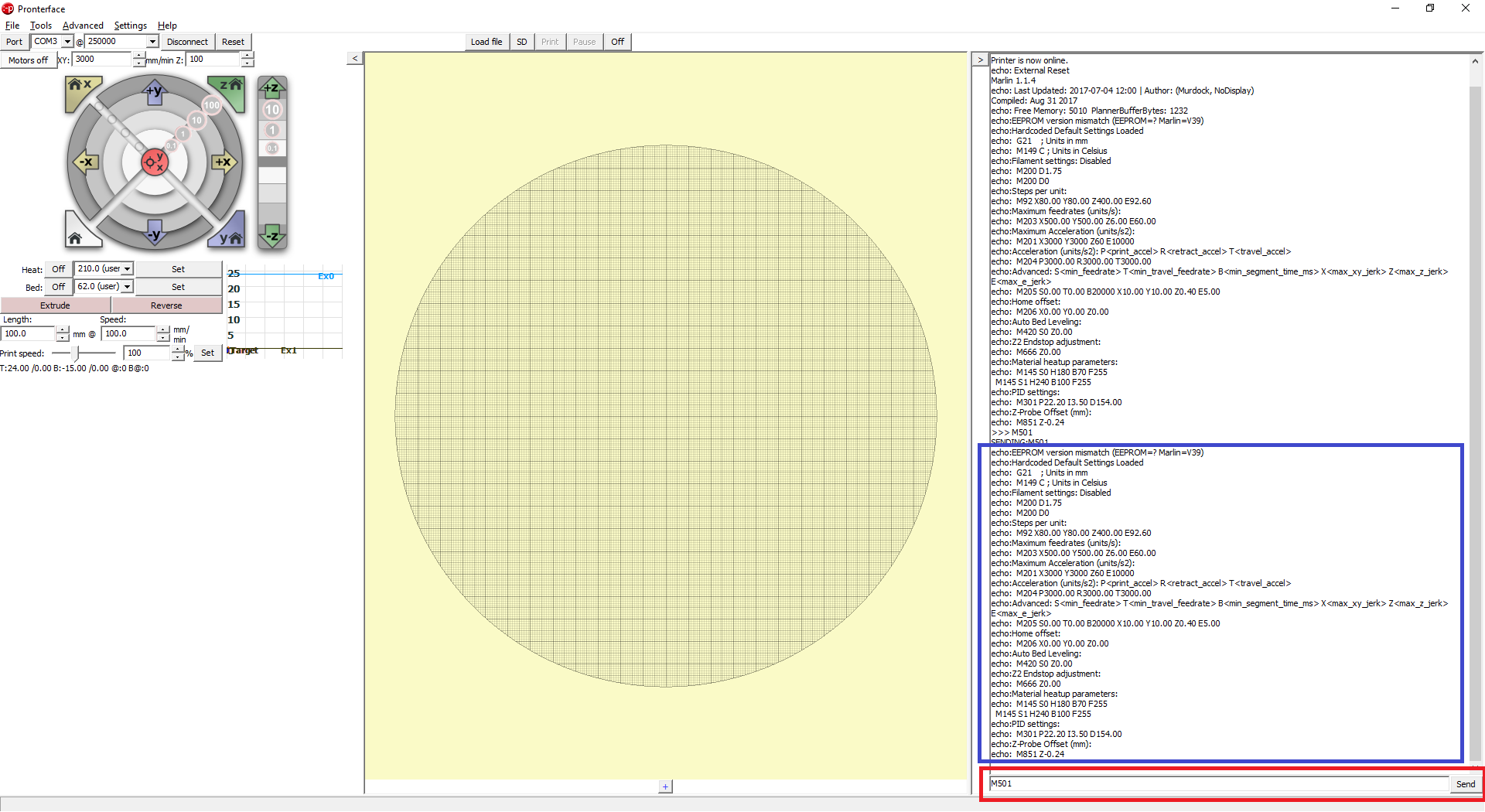
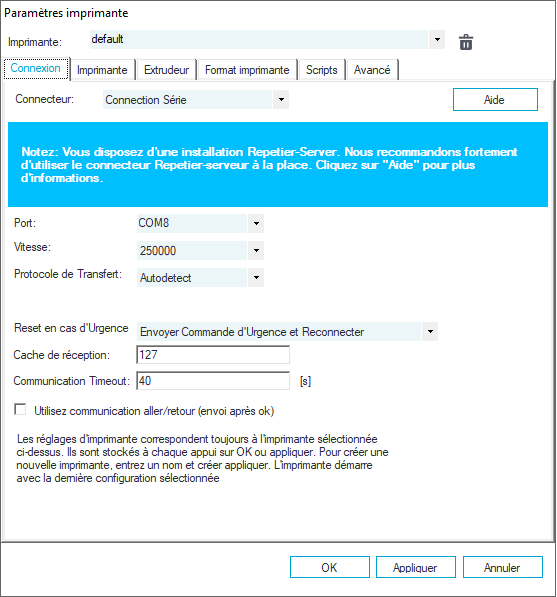
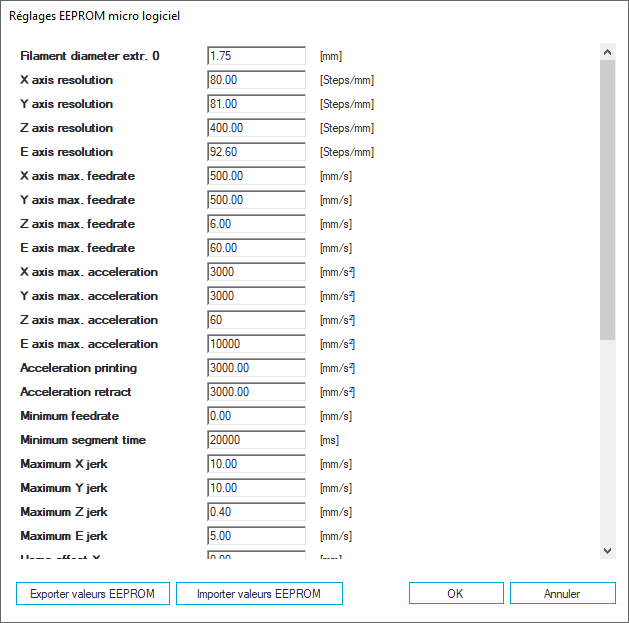
Bonjour à tous, Suite à de nombreuses demandes et bien que je ne pense pas être la personne la mieux placée pour le faire, je vais donc faire un petit rappel sur les notions de « firmware », « eeprom » et sur la façon d'interagir sur certains paramètres. Avant de commencer ce tuto je me suis dit « C'est bien beau mais tu pars de ou ? ». Et puis je me suis rappelé de deux expériences récentes ou j'ai tenté, malgré mes faibles qualités de pédagogue (heureusement les élèves étaient doués !) d'aider deux personnes débutantes. Et je pense que le mieux est de partir zéro. Je m'excuse par avance pour les personnes expérimentées qui seraient à la recherche d'une petite info au passage, mais la lecture de ce post risque d'être ennuyeuse. Pour commencer je tiens à préciser que les point abordés ici sont valables sur tout ce qui tourne avec un micro-contrôleur ATMEGA 2560. (ramps, trigorilla, mks-gen 1.3 et 1. 4 …) Et donc par voie de conséquence toutes les imprimantes Anycubic actuelles. (I3 MEGA, KOSSEL, I3) Niveau firmware, je me bornerai à parler de ce que je connais le mieux, c'est à dire MARLIN. Pour commencer chassons quelques idées reçues que j'ai cru parfois percevoir. Un ramp, une trigorilla, une mks gen c'est à 95 % la même chose. Le différence se limitera au design, aux ports d'extension placés sur la carte, à l'intensité disponible pour certaines extensions, au chip gérant la conversion des signaux vers le port usb de votre PC . Mais c'est tout. Je suis prêt à croire que notre amis @slayer-fr va abandonner le Jack Daniel's pour le Chouchen mais qu'une Trigorilla à imprimé à 90mm/s là ou un ramp imprime à 60mm/s, je n'y croirais pas ! Et pour une seule raison, le micro-contrôleur est le même, le fameux ATMEGA 2560. Sans vouloir vous donner un cours avancé (une fois de plus je ne pense pas avoir les connaissances nécessaires à cela) je pense qu'il est intéressant de comprendre ce que nous faisons. Et vu que nous ne sommes pas là pour nous prendre au sérieux, je vais quelque peu vulgariser mon explication. Quelques généralités : L'ATMEGA 2560 se présente un peu comme un condensé de votre PC. Il est à la fois le CPU, la RAM, et le disque dur de votre PC. Pour fonctionner votre PC à besoin d'un système d'exploitation. L'ATMEGA aussi. Et dans notre cas, ce sera le firmware de notre imprimante. L'ATMEGA n'est cependant pas un processeur comme celui de votre PC, sa fréquence est basse et il ne peut pas gérer une multitude de processus en parallèles. L'ATMEGA ne comprends que du code machine et c'est ce code que vous trouvez dans les fichier « hex » des mises à jour officielles. Cependant je ne sais pas pour vous mais moi j'ai du mal à comprendre l'hexadécimal ! Je vous rassure nous ne sommes pas les seuls ! Mais le langage et la pensée humaine étants difficiles à traduire en langage machine, il fallait trouver un langage intermédiaire et c'est le C++ qui a été choisi. Donc pour résumer quand on souhaite créer un nouveau firmware, on le pense, on l'encode en langage C++ qui reste compréhensible par l'humain, un programme le transforme en langage machine (fichier hex), on transfert le contenu du fichier hex dans l'ATMEGA. Pour information il est très difficile voir impossible de transformer un fichier hex en un programme C++ parfaitement structuré et cohérent. Pour convertir le C++ en langage machine (et souvent pour le transférer dans l'ATMEGA) on utilise le programme « Arduino ». Lors d'une de mes dernières tentative pour aider un débutant je me suis aperçu qu'il y avait parfois confusion entre le firmware et arduino. Arduino n'est que l'outils de conversion (que l'on nomme compilation) et de transfert. Pour simplifier au maximum pour les débutant je faire un rapide parallèle avec un autre logiciel : Vous désirez faire un CV ou un courrier. Vous utilisez le programme « WORLD », vous créez votre CV, vous l'enregistrez. (Dans un fichier « cv.docx » par exemple) Cependant votre document n'est pas le programme WORLD. C'est le fichier « cv.docx ». Pour Arduino c'est pareil ! Arduino est l'équivalent de WORLD et le firmware est l'équivalent de votre document « cv.docx ». Revenons maintenant sur notre sujet principal le firmware de l'I3 MEGA. Notre ami @thsrp demandait comment entrer dans le firmware d'origine Anycubic. La réponse est hélas très simple, on ne peut pas ! Eh oui comme je l'écrivais plus haut nous n'avons que le fichier hex. Pour pouvoir effectuer des modifications importantes il faut les fichiers C++ que l'on appel « les sources ». Cependant nous pouvons effectuer quelques ajustements. Le firmware de nos MEGA est basé sur le firmware MARLIN, ce dernier comporte un grand nombre de paramètres qui peuvent être modifiés avant transfert dans les fichiers source. Cependant, certains paramètres nécessitent d'êtres modifiés, testés, modifiés de nouveau, puis testés de nouveau … Cette procédure étant fastidieuse en passant à chaque fois par une compilation et un transfert intégral des sources, les développeurs de marlin on fait appel à une zone spécifique de l'ATMEGA nommée « eeprom ». Cette dernière, permet de stocker des informations et de les modifier sans avoir à transférer tout le reste du programme. Pour effectuer ces modifications 2 options. Passer par l'envoie de commande GCODE via votre programme de pilotage préféré, (Pronterface, Repetier-Host …) ou utiliser la fonction simplifiée de Repetier-Host. Mode commandes GCODE : Lancer Pronterface et connectez-vous à votre imprimante. Dans la zone entourée en rouge écrire M501 et cliquer sur « send ». La zone entourée en bleu correspond au retour de la commande. La commande M501 demande à la machine de retourner les paramètres contenus dans l'eeprom. Si l'on analyse quelques paramètres de la réponse cela donne : echo: M92 X80.00 Y80.00 Z400.00 E92.60 Cette ligne donne le nombre de steps par mm pour chacun des axes ainsi que pour l'extrudeur (E). Pour changer par exemple la valeur de l'axe Y par 81, il vous suffit de rentrer dans la zone entourée en rouge ; M92 Y81.00 sans le « echo » puis cliquez sur « send ». Et maintenant il y a un piège. Si vous ne faites rien de plus, au prochaine redémarrage de votre carte, le ou les nouveaux paramètres seront perdus ! Pour qu'ils deviennent permanents, il vous rentrer la commande M500 dans la zone entourée en rouge et cliquer sur « send ». Ce a quoi la machine répond quelque chose dans ce style « echo:Settings Stored (465 bytes; crc -22444) » La configuration est maintenant permanente. En reprenant la même logique, vous pouvez ajuster vos vitesses maximum avec la commande M203, les accélérations maximum, avec la commande M201, … Reprenons un autre exemple détaillé avec la commande M206. Lors d'un M501 la machine donne : echo: M206 X0.00 Y0.00 Z0.00 Ceci signifie qu'aucun offset n 'est paramétré. Seulement, après avoir fait le réglage de votre bed, vous constatez que votre première couche est trop écrasée. D'habitude vous tricheriez dans le trancheur. Seulement si au prochain réglage votre machine à bougée un peu, vous serez obligé de retrancher votre pièce pour compenser. Ou bien vous joueriez sur vos endstops. Mais avec le dual z-endstop il est fastidieux d'avoir un réglage parfait des deux cotés tout en ayant le bon écrasement. Ou pire vous recommenceriez le nivellement de votre lit jusqu'à l'écrasement idéal. Cette procédure peut vite devenir très rébarbative. Il y a plus simple ! Dans la zone entourée en rouge saisissez : M206 Z0.01 puis « send » M500 puis « send » Votre machine considérera désormais que le 0 de l'axe Z se trouvera à 0.01mm au dessus du déclenchement du endstop. Si l'écrasement est toujours trop important, recommencez avec comme valeur 0.02 et ainsi de suite. echo: M206 X0.00 Y0.00 Z0.00 C'est plus simple et garde le gcode généré par le trancheur vierge de toute compensation liée au nivellement du lit. Je ne détaillerais pas toutes les commandes mais je vous invite à consulter cette page pour plus d'informations. http://reprap.org/wiki/G-code/fr En revanche n'oubliez jamais de remettre l'offset de l'axe Z à 0.00 avant de refaire votre prochain nivellement du lit. Pour les allergiques de la ligne de commande il y a encore plus simple ! Mode "Graphique" : Installez Repetier-Host sur votre PC. Configurez la connexion à votre imprimante comme ceci : (adaptez le port com) Puis connectez l'imprimante. Une fois la connexion établie, dans le menu « Configuration », choisissez « Configuration eeprom du firmware ». Vous arrivez dans l'écran suivant : Cet écran vous permet de modifier, de façon « graphique », tous les paramètres de votre eeprom. Un autre avantage de cette méthode est que les paramètres sont clairement nommés. Dans cet écran vous pourrez également sauvegarder ces paramètres dans un fichier sur votre pc pour une restauration ultérieure via le bouton « Exporter valeurs EEPROM ». Voilà pour ce rapide survol qui je l’espère n'était pas trop soporifique . Si vous avez des questions, n'hésitez pas à les poster car il est toujours plus simple d'expliquer avec des cas concrets.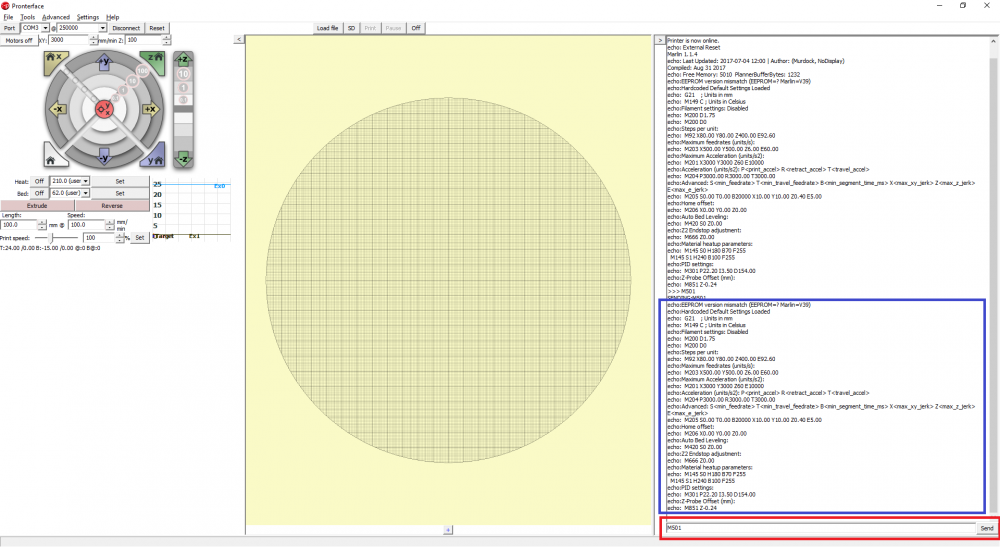
- 33 réponses
-
- 11
-

-
-

vends [VENDU][120€] Imprimante 3D Delta Mini kossel 16x20cm
Clément Bonfils a posté un sujet dans Ventes
Bonjour à tous, Je vends une mini kossel 16cm x 20cm (hauteur) 120€ Planéité pas au top, à re-régler, je n'ai plus le temps (niquel au centre mais si pièce trop grosses réglages à peaufiner) Imprime en bonne qualité et plus rapide que le temps indiqué sur Cura. Tête E3D lit originale max 245°C Plateau chauffant 220V max 130°C Carte Ramps 1.4 + Arduino + A4988 Capteur de plateau BL-touch original. Marlin 1.1.5, je donne aussi les sources. Support de bobine sur le dessus pour encombrement minimal. Je donne avec des bras de rechange en carbone. Ainsi que les stls des pièces que j'ai utilisé sur cette machine. J'offre 1 rouleau de scotch protecteur haute température. A récupéré en soiré en semaine ou en we sur nogent sur marne. Démo de fonctionnement possible. Envoi postal possible.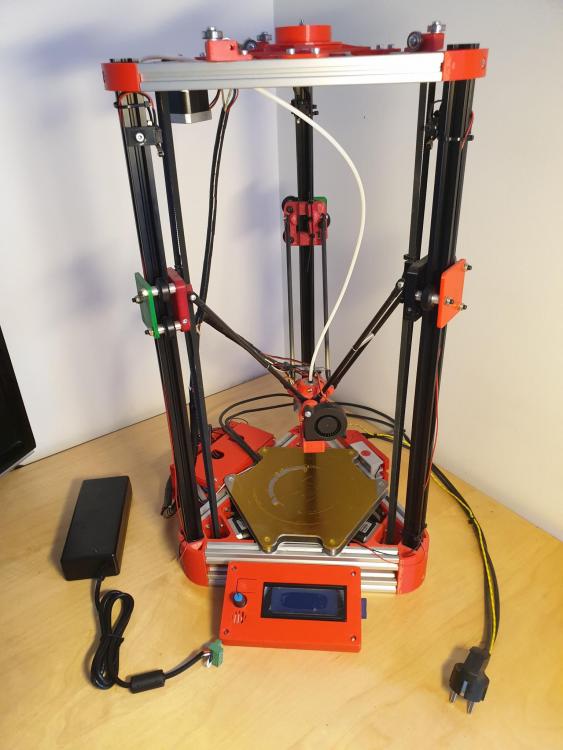


-
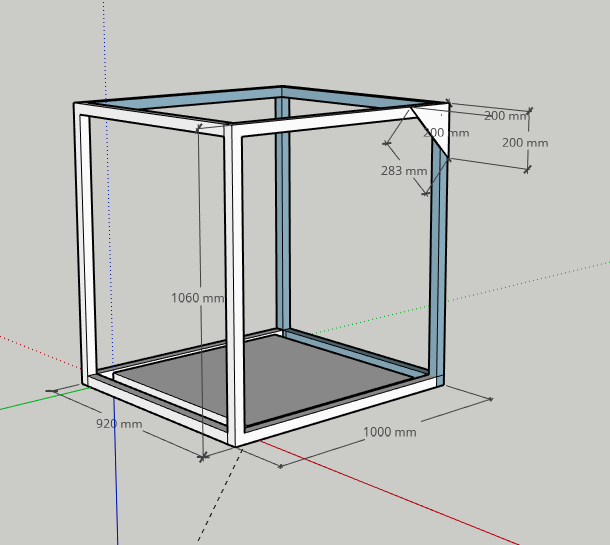
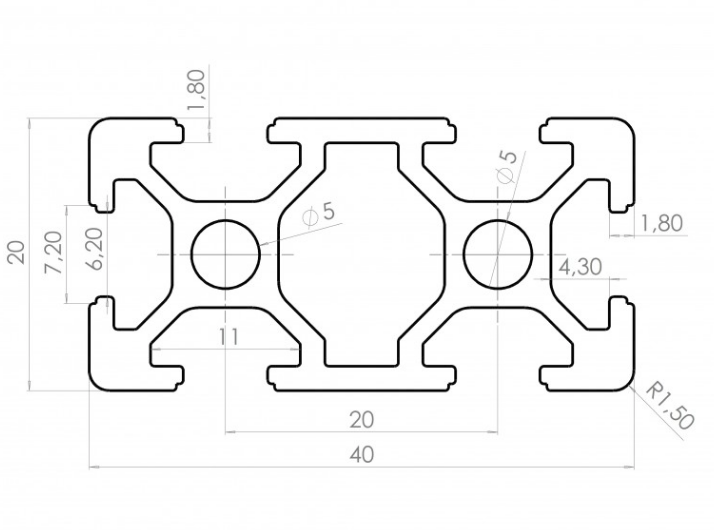
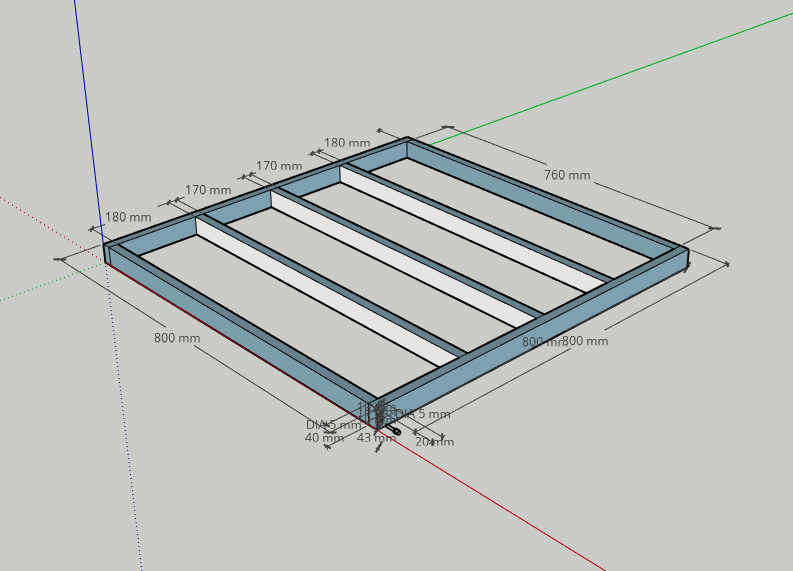
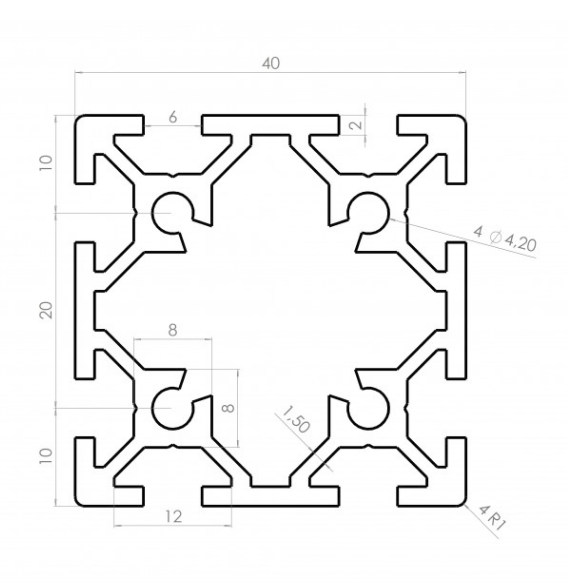
Bonjour à tous ! J'ai pour projet de me faire une imprimante maison mais grand format 800*800*1000. Je poste ici car j'aurai surement le temps de la construction des questions et des problèmes à régler... Je fournirai avec le temps plan + instructions de montage si des gens veulent également se faire une big 3d de son beau nom la I3D80100 Avec donc plateau chauffant mais fixe et donc déporter les axes avec deux moteurs pour chaque axe (peut être des nema 23 si nema 17 pas asser puissant). Structure en aluminium profilé 40*40. http://www.systeal.com/fr/profiles-aluminium-6-mm/3-profile-aluminium-40x40-fente-6-mm.html La structure extérieure serai donc de 1000*920*1060 au total (peut être un peu plus avec l'ajoute de plaque de fermeture + renforts. Pour la plateau je compté partir sur 4 hotbed de 400*400 et me servir de relai SSR pour la chauffe. le tout monté sur entre deux plaque de 3mm + renforts pour éviter toutes éventuelles déformations lors de la chauffe. Côté extrudeur je compte partir sur du double car autant avoir un grand format autant pouvoir imprimer de belles choses ! côté Electronique. je par sur un kit Arduino mega + ramp 1.4. 4 moteurs pour l'axe 2 piloté par un TB6600 2 moteurs pour l'axe y piloté par un TB6600 1 moteur pour l'axe x sur un DRV8825 (pour rester en 32 pas) idem pour moteur extrudeur 0 et 1 Lit chauffant un SSR 40 Ajout d'un module de détection de filament http://3dmodularsystems.com/fr/kits-et-packs/275-module-de-detection-de-fin-de-filament-pour-imprimantes-3d-reprap.html (il faut que je regarde si je peux en mettre deux sur une ramp 1.4) Et pour le Firmware se sera Marlin Je compte aussi refroidir au maximum tout les circuits pour pouvoir faire de longue voir très longue impression voir peut être une seconde ligne d'alimentation avec gestion de vitesse des ventilateurs. Voici l’esquisse de la structure Plan de base su support du plateau chauffant Alu profilé 20*40 (http://www.systeal.com/fr/profiles-aluminium-6-mm/923-profile-aluminium-20x40-fente-6-mm.html) 5 longueur de 760mm (760*20*40) 24€ 2 longueur de 800mm (800*20*40) 10€ Au total ~ 34€. + 4 equères + visserie ~ 10€ http://www.systeal.com/fr/assemblage-fixation-6mm-profile-aluminium/1156-equerre-de-fixation-18x18-profiles-6-mm.html#/visserie-oui/cache-non (Je vous conseille https://www.bricovis.fr/std/accueil.php pour de ce qui est de la visserie ce n'est pas trop cher ) Pour assembler le tableau il faut percer en 4.5mm et tarauder en 5mm À chaque intersection puis viser avec des M5*40 (minimum) Besoin : M5*40 X20 Le plateau sera fixé ensuite par le dessous pour un maintien solide. Avenir : Fixation plaque 800*800*3 d'alu dessous Fixation plateau chauffant Fixation plaque 820*820*3 d'alu dessus Fixation plaque en verre 820*820*3 Montage du chassie Impression des pièces sur mesure Axe Z Axe Y Axe X Alimentation Electronique Firmware Premier test Photo & vidéo du montage Liste du matériel à acheter + outils Cordialement !
-
.thumb.gif.d687f4fd50c6b9cec232bc16f9cc010a.gif)
Erreur de connexion Arduino Mega 2560 chinoise
Mimarium a posté un sujet dans Discussion sur les imprimantes 3D
Bonjour, Depuis plusieurs mois j'ai des problèmes de connexion avec mon Arduino. J'ai une arduino mega chinoise connectée sur une RAMPS. Je suis certains d'avoir installé les bons drivers car j'arrive à communiquer avec l'imprimante, je peux imprimer depuis mon PC etc... Cependant ça ne marche qu'une fois sur 10. Je dois brancher et débrancher mon câble USB une dizaine de fois avant d'obtenir la connexion stable. 9 fois sur 10 j'ai cette erreur : Le problème ne vient pas de mon Windows car c'est pareil sur 2 autres PC windows et mon raspberrypi... Auriez-vous une solution ? Une idée du problème ? Je vous remercie d'avance ! Cordialement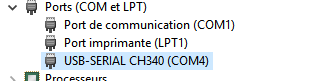
-
Bonjour à tous. Je viens d'acheter une Creality Ender 3 Pro, et cherche à recompiler le soft Marlin (après tout, c'est de l'open source !). J'ai récupéré les sources (un fichier ENDER3 PRO SOURCE CODE, je ne sais plus exactement où :(, mais il y a celi de la Ender 3 sur https://www.creality3donline.com/blog/creality-firmware-amp-source-code-and-instruction-download-b0034.html) J'avais Arduino installé (1.8.8). En ouvrant le fichier Marlin.ino, il faut déjà installer la librairie U8glib. Ensuite, dans Outils/Type de carte, il faut sélectionner une Sanguino (dixit un mesage d'erreur si on tente de compiler :(). C'est ce que je fais après avoir ajouté l'url https://raw.githubusercontent.com/Lauszus/Sanguino/master/package_lauszus_sanguino_index.json dans Fichiers/Préférences/Url de gestionnaire de cartes supplémentaires. Du coup, la Sanguino apparait dans la liste déroulante Type de carte. Mais, premier problème, dans Type de processeur, il y a 5 choix (de ATMega644, ATmega1284, différentes fréquences...). Je n'ai pas encore la machine, donc je ne sais quelle carte est employée. Si quelqu'un a déjà fait la manip, pouvez-vous m'indiquer quel proc sélectionner? Bon, après je me dis tentons quand même une Vérif pour tester. Et là, un beau using typedef-name 'fpos_t' after 'struct', dans le fichier . Bref, je peux commencer à tracer toutes les erreurs, mais à priori le soft Marlin modifié par Creality devrait se compiler sans pb. Donc avant de me lancer dans le debuggage, quelqu'un a-t-il déjà recompilé le soft Marlin pour la Ender 3 Pro? Et si oui, pouvez-vous m'indiquer où vous avez récupérer le source, et quelle configuration faire dans l'Arduino? Car ma méthode est d'abord de recompiler le soft "origine" en vérifiant que tout est OK avant de faire mes propres modifs Merci par avance!