Chris SV
-
Compteur de contenus
31 -
Inscrit(e) le
-
Dernière visite
Récompenses de Chris SV
")





-
Délais de livraison Creality K2 Plus
Chris SV en réponse au topic de Chris SV dans Entraide : Questions/Réponses sur l'impression 3D
Si justement en 3 jours cela m'a été annoncé, mais c'est surprenant car c'est la 1ere fois, mais c'est paypal qui ma donner le numero de suivi et le jour de livraison, qui correspond à 3 jours. J'ai même failli annulé ma présence au repas annuel de mon entreprise, lol.. Un vrai gosse je vous dit. Bon un gosse de plus de 50 ballets, mais... JE VEUX MON JOUET... .. Non mais avec ce que vous m'avez tous dit, je suis rassuré, ou presque. Merci en tout cas. -
Délais de livraison Creality K2 Plus
Chris SV en réponse au topic de Chris SV dans Entraide : Questions/Réponses sur l'impression 3D
Merci Pascal, je suis moins inquiet, toutefois c'est ch.. quand il t'indique que la livraison est prévu 3 jours après et que rien bouge, surtout pour un appareil a ce prix. Bon pour patienter j'ai ma vielle ender3 customisé, et mon hypercube dont je vais me séparer, je sais pas si je la vends ou si je l'enmene au boulot pour les collègues. -
Délais de livraison Creality K2 Plus
Chris SV en réponse au topic de Chris SV dans Entraide : Questions/Réponses sur l'impression 3D
Merci pour ces renseignements, cela me rassure. Je vais testé le track DHL belge. Sinon content de votre achat ? [EDIT] Je ne vois pas de différence avec le Tracking belge, mais bon je vais encore patienter. -
Délais de livraison Creality K2 Plus
Chris SV a posté un sujet dans Entraide : Questions/Réponses sur l'impression 3D
Bonjour à tous, Une petite question s'il vous plait, j'ai commandé la K2 Plus Combo sur le store de Creality fr, le produit est marqué expédié et il a été apparemment pris par le transporteur DHL le 14 janvier, mais c'est toujours marqué qu'il est a KOLN, en Allemagne depuis ce 14 janvier, cela n'a pas bouger. J'ai contacté par le chat et une personne qui m'a dit que c'etait normale et que cela pouvais mettre un moi de transport par voie maritime (d'Allemagne en France ??? bizarre) . Ensuite il m'indique que c'est en raison du poids que cela peut être plus long. Il rajoute qu'il faut pas s'inquiéter etc etc... mais a ce prix cela m'inquiète quand même que cela ne bouge pas d'un pouce en 6 jours. Avez vous eu des délais aussi long avec le store Creality ? J'ai déjà commandé pas mal de chose à creality, mais depuis un store chinois, jamais directement depuis le store de creality. C'est mon cadeau de noël, je suis comme un gosse c'est sûr, surement trop impatient, mais je trouve cela long. -
32 bits Plus de capteur de filament, depuis un changement de firmware
Chris SV en réponse au topic de Chris SV dans Électronique
Bonjour, Je reviens vers vous, car j'ai trouvé pourquoi je me torture la tête avec sa. J'ai réussi a trouver pour ma Ender3, puis j'ai changé aussi le capteur de mon Hypercube par un BTT sensor, Du coup flash de la carte mere, et dans le même temps ou presque j'ai changé de slicer. Cura m'énervant trop avec ces plantages et parfois des durées hallucinantes. Et rebelotte le capteur de filament étant plus détecté. Après de nouveau une recherche je suis retombé sur la solution. Dans le slicer, ajouter les codes suivant dans les Gcode de démarrage et fin. Dans le Gcode de démarrage ajouter M75 Dans le Gcode de fin ajouter M77. C'est tout bête mais encore faut t'il le savoir. Je précise que du coup (avant cette ajout) cela fonctionne lorsque l'écran est en mode Marlin, mais pas en Mode Touch. En ajoutant ces GCode, cela fonctionne partout. -
32 bits Plus de capteur de filament, depuis un changement de firmware
Chris SV en réponse au topic de Chris SV dans Électronique
Bonsoir PPAC, Merci pour l'information, je vais essayer avec l'écran en mode Marlin, mais elle est en cours d'impression sur un gros print. Si non M119, m'indique bien de changement d'état, j'ai plus en mémoire le terme exact, mais il y a open et ou autre terme plus long, je vous redit cela dés que le print est fini. Je voudrais éviter de mettre le capteur sur l'écran car j'ai peur que lorsque j'utilise Octoprint il ne soit plus pris en compte du coup. -
32 bits Plus de capteur de filament, depuis un changement de firmware
Chris SV a posté un sujet dans Électronique
Bonjour à tous et bonne année 2022. J'ai un souci depuis quelques temps avec le capteur de fin de filament, je m'en suis pas aperçu tout de suite, mais bien-sûr quand j'ai manqué de filament cela a continué comme si de rien était et donc planté mon print. Cela fonctionnait avant sa c'est sur. Je suppose que c'est depuis que j'ai changé le firmware que cela ne fonctionne plus. Présentation du système: Donc c'est sur une Ender 3 (1ere du nom), j'ai changé la carte mère d'origine par une SKR Mini E3 v1.2 afin d'ajouter plus facilement le capteur de fin de filament et un BLTouch. Tout fonctionnait parfaitement bien, mais j'ai voulu changé l'écran par un BTT TFT35 E3. Pas de souci pour l'intégration de l'écran, et j'en ai profité pour prendre le dernier firmware 2.0.9.2 puis récemment le 2.0.9.3 de marlin. Le capteur de fin de filament de ma conception, a juste la masse et le signal à raccordé en E0-Stop avec pour signal PC15, j'ai déclaré le PIN PC15 pour le sensor, mais j'ai vu qu'il était déjà préconfigurer ainsi dans le pins_BTT_SKR_MINI_E3_common.h. Je sauvegarde mes fichiers de configuration de chaque version, donc sur ce nouveau firmware j'avais mis la même chose concernant la partie fin de filament. Mais cela ne fonctionne pas. Ce que je comprend pas: J'ai lancer la commande M119. J'ai bien un changement d'état si je met ou pas du filament. J'ai lancé la commande M412, cela me dit bien que la détection de filament est activée dans Marlin. Mais cela veux rien savoir. Je précise: J'ai une Hypercube avec une carte mère SKR 2 et un écran BTT TFT 35, et cela fonctionne parfaitement. J'ai bien-sûr pas activé le capteur de fin de filament dans la configuration de l'écran BTT. Comme sur mon hypercube. Mes doutes: La compilation se passe bien avec Visual Studio Code, mais j'ai un doute sur le nom à employer dans les cartes, car ce n'est pas le même nom qu'il y avait sur les anciennes version de Marlin: -Dans plateformIO.ini, j'ai mis: default_envs = STM32F103RC_btt -Dans Configuration.h j'ai mis: #define MOTHERBOARD BOARD_BTT_SKR_MINI_E3_V1_2 -J'ai pas de défaut majeur à la compilation, mais un warning tout de même : Marlin\src\inc\Warnings.cpp:548:4: warning: #warning "Motherboard DIAG jumpers must be removed when SENSORLESS_HOMING is disabled." [-Wcpp] 548 | #warning "Motherboard DIAG jumpers must be removed when SENSORLESS_HOMING is disabled." -Et dernier point, lorsque je flache marlin, j'ai bien mon nouveau fichier FIRMWARE.CUR, mais l'ancien "firmware.bin" reste présent sur la carte SD, habituellement il le supprime. Je vous joint les fichiers de configurations de Marlin, si des fois une âme charitable serait me dépatouiller. J'ai ajouté aussi le plateformIO.ini et au cas ou le fichier de configuration de l'écran. Marlin 2.0.9.3 Stable. J'ai testé aussi le capteur de fin de filament de BTT celui avec la roue dentée, mais la non plus cela marche pas (en activant bien-sûr sa fonction #define FILAMENT_MOTION_SENSOR) Surtout ce que je comprend pas c'est que Marlin détecte bien les changements avec M119. J'ai demandé aussi à BTT sur leur github, mais pas de nouvelle pour le moment. Merci de votre aide. Configuration.h Configuration_adv.h platformio.ini config.ini -
Ou se procurer de l'alcool isopropylique en local ?
Chris SV a posté un sujet dans Les imprimantes 3D SLA
Bonjour, Je viens d'avoir une Elegoo Mars 2 pro et avant de commandé de l'alcool par internet, je voulais essayer de voir si cela se trouvé en local. Mais dans quelle magasin ? J'ai regardé dans les grandes surface de bricolage, et j'ai rien trouvé à pars l'alcool à brulé ou l'alcool ménager > 95°. J'ai vu sur des forums qu'en pharmacie c'est peut être possible, mais hors de prix. J'habite dans une grand ville ou il y a de nombreux commerce et je pense vraiment que cela doit pouvoir se trouver, mais quelle type de magasin ? Bien sûr il y a internet, mais soit c'est très cher, soit les fdp font 40% du produit (enfin j'exagère un peu). Donc quitte à payer cher autant que se soit local. Merci à vous En passant l'alcool ménager > 95% serait-il pas suffisant, éventuellement en faisant un nettoyage plus long, j'ai acheter la ELEGOO Mercury Plus avec, donc laisser 5 ou 10 minutes de plus ne pause pas de souci. -
Bonjour oniff, c'est dommage que vous finissez pas votre post par la conclusion de vos essaies. Vous dites essayer avec de l'alcool ménagé, mais qu'est-ce que cela a donné ? Avez vous fait un essayer avec le bioethanol ? Je viens d'avoir une Elegoo mars 2 pro et cela m'intéresse, car pour le moment je ne trouve pas en local ou acheté de l'isopropylique.
-
- autre - Bruit vraiment trop important des Moteur X et Y
Chris SV en réponse au topic de Chris SV dans Électronique
Bonsoir, Je viens seulement d'avoir la notification de votre message . Pour le moment je suis en pleine reconstruction, je refais mon setup, pour séparé au maximum le 230v du 24, car j'avais aussi des soucis de communication entre la carte mère et l'écran. J'ai changé la carte mère par une SKR-2, mais il faut que je la renvoi, car BTT annonce un souci sur cette carte, donc je suis à l'arrêt. -
Bonjour à tous, Je viens de recevoir ma carte SKR 1.4 turbo et son écran que j'aime 100 fois plus que celui de MKS. Bref, je patine un peu encore avec le firmware, mais un problème m'inquiète. Comme l''explique le titre, j'ai le ventilateur de refroidissement du filament qui est toujours à fond. Dans l'écran il indique bien 0, mais il tourne à fond et bien sur si j'essaie de l'éteindre il ne le fait pas ni si je souhaite baisser sa vitesse. J'ai rien trouvé dans le firmware qui pourrai en être la cause, même en comparant avec l'ancien firmware de ma MKS SGEN L V2 qui ont le même processeur. Y a t'il un contrôle ou essaye que je puisse faire avant d'envisager de contacté le vendeur pour un échange. Car d'ailleurs chose surprenante je n'ai pas eue le droit au petit canard et le sachée antistatique n'était pas fermé, mais juste plié. A mon avis c'est un retour que l'on m'a refilé.
-
Bonjour, J'ai un souci avec ma carte MKS SGEN_L V2, Makerbase ne repond pas a mes demande que se soit en email ou sur le Wiki. Je vais passé a BTT, mais en attendant mon imprimante est en rade. C'est sur une Hypercube, avec donc une carte mere MKS SGEN_L V2 et un TFT35 de Makerbase (un TFT pas le TS). J'avais une configuration qui fonctionnait, mais j'ai changé le firmware de la carte mère car j'ai mes moteur qui font énormément de bruit malgré des TMC2209. Je me suis aperçu que j'avais laisser le paramètre CHOPPER_TIMING CHOPPER_DEFAULT_12V au lieu de 24V (alimentation de ma carte), donc peut être le problème. Une fois flashé, j'ai accès à tout depuis l'écran, mais quand je fait chauffé une buse ou le plateau, cela chauffe bien et s'arrête a la consigne, mais la température ne monte pas a l'écran. il faut que je sort du menu et re-rentre dedans ou parfois même éteindre puis la nouvelle valeur de température est bien prise en compte; mais ne bouge pas si cela refroidit. Le principal souci c'est que si je lance un print, cela lance la chauffe du plateau, mais la valeur de température ne bouge pas et donc cela ne va pas plus loin. Obligé d'arrêté le print qui n'a pas commencé. Je suis tombé sur le paramètre AUTO_REPORT_TEMPERATURES, mais il est bien activé. J'ai testé en remettant le CHOPPER_TIMING CHOPPER_DEFAULT_12V, mais cela ne change pas. Ainsi que d'autre firmware que j'ai fait avant et qui fonctionnait (je sauvegarde chaque firmware quand je fait des modifications). J'ai testé aussi d'autre firmware de l'écran, mais rien. Avez vous une idée ? J'ai reçu mon écran BTT, mais je pourrais commander la carte que le mois prochain, si elle est disponible, car il semble y avoir une rupture de stock chez pas mal de revendeur sur Ali de la SKR 1.4 Turbo. Pour le moment je suis en rade avec l'hypercube, heureusement que j'ai ma Ender3 Merci
-
TRINAMIC, histoire, fonctionnement et autres joyeusetés des TMC2xxx
Chris SV en réponse au topic de stef_ladefense dans Tutoriels
Bonjour, Merci pour ce superbe tuto bien documenté, j'ai trouvé des informations très intéressante, mais il va falloir que je le relise peut être plusieurs fois afin de m'approprier la méthode de calcul, c'est n'est pas beau de vieillir, lol. Quoi qu'il en soit j'avais un doute sur la date de création de ce tutoriel, car il n'y a que le jour et le mois, mais ont voie bien que c'est 2021 dans les messages cités. Donc c'est vraiment tout frais et la petite note de fin indique que le mode UART est encore balbutiant. Et comme j'ai un souci avec mes moteurs qui sont vraiment très bruyants malgré ces TMC2209 j'ai donc un doute que cela fonctionne pas bien. Je suis sur une Hypercube donc Core XY et j'ai une MKS SGEN_L V2 accouplé donc a des TMC2209 de MKS aussi, Stepperonline pour les moteurs 17HS19-2004S1. J'ai déclaré le mode UART dans marlin et j'ai la possibilité de les réglés dans l'écran MKS TFT35. Par défaut il y avait 800mV dans marlin. Aillant un doute sur le réglage des Vref j'ai monté uniquement à 900mV, les moteurs chauffent pas, mais font énormément de bruit et vibre même en maintient. J'ai baissé par palier jusqu'à 300mV ou il décroche, mais même à 400mV ils sont encore très bruyant. Demain je vais faire l'essaie à vide sans les axes en mouvement, mais j'ai des doutes puisque même moteur à l'arrêt (mais sollicité électriquement) cela vibre fort. Au point que j'ai arrêté un print en cours de nuit, car trop insupportable pourtant à 2 pièces de ma chambre et fermé. Est-ce que les mettre en standalone pourrait remédier à ce genre de souci si ce n'est pas encore bien gérer par marlin, surtout qu'au final, il est vrai qu'une fois réglé on a plus besoin d'y toucher. Ou est-ce qu'en mode Core XY il y a d'autre paramètres à vérifier? D'après ce que j'ai compris le linear advance n'est pas activé, apparemment il pourrait aussi provoqué des bruits. J'ai aussi une Ender3 modifié avec un SKR Mini E3 donc TMC2209 en Uart et j'ai pas de souci de leur coté, même si pendant les cercles ont les entends quand même par mal, mais pour le reste c'est les ventilo que j'entend. Stepper Hypercube pour X et Y: Manufacturer Part Number: 17HS19-2004S1 Motor Type: Bipolar Stepper Step Angle: 1.8 deg Holding Torque: 59Ncm(84oz.in) Rated Current/phase: 2.0A Voltage: 2.8V Phase Resistance: 1.4ohms Inductance: 3.0mH ± 20%(1KHz) -
- autre - Bruit vraiment trop important des Moteur X et Y
Chris SV en réponse au topic de Chris SV dans Électronique
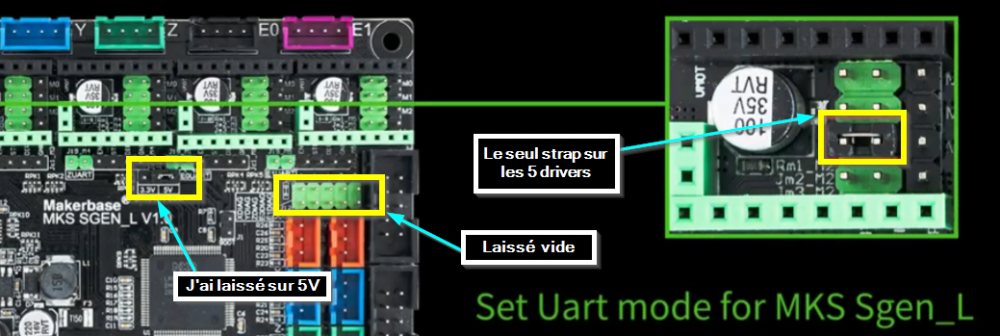
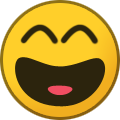
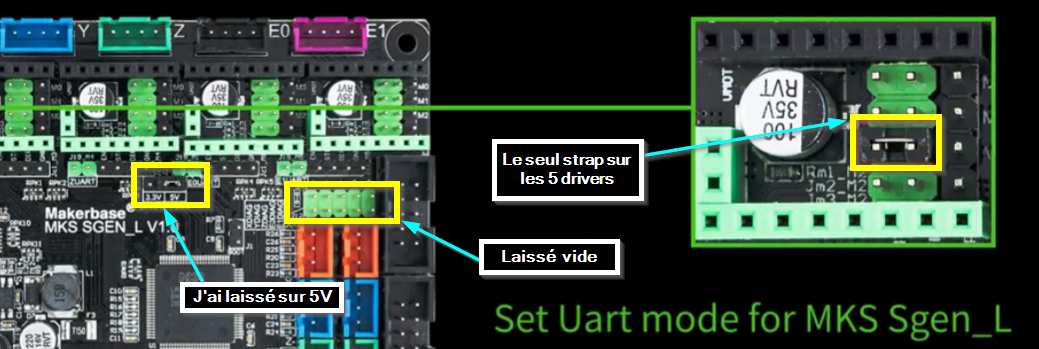
Bonjour Jonathan, Pas encore, mais j'y est pensé justement juste après avoir écrit ma demande, je vais essayé sa ce weekend. Et merci pour le lien, je vais regarder cela. Bonjour, J'ai essayé ce matin d'enlever les courroies et c'est toujours aussi bruyant, la mécanique (roulement) est bien souple et fluide. Par contre j'ai un gros doutes avec Makerbase, car je suis tombé sur une autre vidéo de chez eux ou la présentation de l'installation des drivers TMC2209 est différente. De quoi avoir des soupçons et plus rien comprendre. Le montage que je vous est mis sur mon 1er message proviens de la vidéo d'explication, avec comme lien sur le Github Makerbase/MKS SGEN_L V2/Manual/MKS TMC2209 Dans cette parie ils disent que le réglage est le même entre la SGEN_L V1 et V2, hors elle n'ont pas tout a fait la même connectique. on peut voir sur la photo les connections pour XUart YUart ZUart etc.. que je n'est pas sur la V2. Ici entouré de rouge: Et j'ai trouvé une vidéo de makerbase qui utilise ces connecteurs, donc est-ce un doublon de connectique ???. Voici la vidéo ICI Et voici ce qu'indique la vidéo pour le mode Uart, sur la SGEN_L_v1 (toujours elle de présenté) Donc en rouge enlever tous les jumper, puis ajouter XUart YUart etc.., De plus il passe en 3.3V contrairement à l'autre vidéo, mais c'est peut être a cause du sensorless. J'ai vérifié sur le Github de la V1 et cela renvoie bien à la même vidéo que la V2, comme j'ai fait, mais cette vidéo trouvé sur YouTube sème le trouble sur mon branchement puisque les moteurs sont toujours aussi bruyant. Bon dans tout les cas sur la V2 je n'est pas les connecteurs XUart YUart etc.. Est-ce que le mode classique avec le réglage des potentiomètre pourrait éliminer ce problème? Apparemment d'après le superbe tuto que vous m'avez indiqué, le mode Uart serait encore un peu a l'état de Beta.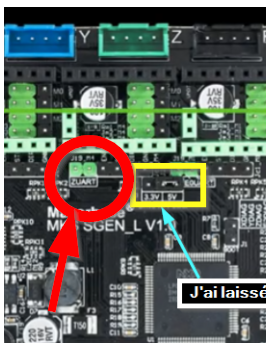

-
- autre - Bruit vraiment trop important des Moteur X et Y
Chris SV a posté un sujet dans Électronique
Bonjour à tous, Voila j'avance petit à petit sur mon Hypercube il est potentiellement terminé mécaniquement, il reste l'habillage et finition et j'ai put imprimé mes 1ere pièces, mais j'ai encore un souci avec mes moteurs, après mes Z, cette fois c'est mes X et Y qui sont vraiment beaucoup trop bruyant au long therme. Voila les steppers de stepperonline: Manufacturer Part Number: 17HS19-2004S1 Motor Type: Bipolar Stepper Step Angle: 1.8 deg Holding Torque: 59Ncm(84oz.in) Rated Current/phase: 2.0A Voltage: 2.8V Phase Resistance: 1.4ohms Inductance: 3.0mH ± 20%(1KHz) Voila la position des switch sur ma MKS SGEN-L V2 avec des drivers MKS TMC2209 Concernant les Vref, par défaut il y avait 800mV dans Marlin, j'ai passé à 900mV il ne chauffe pas beaucoup, mais font toujours autan de bruit. J'ai glané quelques reponse a droite et a gauche, mais sans réel resultat, comme baissé les Vref, j'ai testé en plusieurs palier, jusqu'à arriver à 300mV ou les moteurs décrochent et loupent beaucoup de pas, cela m'a permis malgré tout de voir que le drivers réagissait bien au changement de Vref par le logiciel, mais cela ne m'a pas baissé le bruit pour autan. Etant en Core XY, il y a peut être d'autre chose à faire dans le soft ? Avec mon télephone, ce n'est vraiment pas facile de capter le bruit réel des moteurs, mais j'ai fait une présentation de mon hypercube, ou je présente aussi le bruit des moteurs et un bout de mon Ender3. ICI Mais pour vous dire à quel elle fait du bruit, j'ai lancé un print de plusieurs heures et j'ai été obligé de l'arrêté la nuit, car je n'arrivais pas à dormir malgré qu'elle est dans une pièce fermée. Merci de votre éventuelle aide.