bob6199
-
Compteur de contenus
64 -
Inscrit(e) le
-
Dernière visite





Récompenses de bob6199
")





-
Super, je vous remercie pour votre retour
-
merci pour vos retours pour imprimer des pièces style pièces pour fabriquer une Voron, cela pourrait se faire?
-
Bonjour à tous, je possède déjà 3 imprimantes classique fdm. Je me pose la question d'investir sur une SLA en particulier une photon d'anycubic. N'ayant jamais vu de pièce en résine, je me pose quelques question: au niveau résistance des pièces, est-ce que la résine est plus solide que du fdm classique? Mon usage est plutôt de réaliser des pièces technique et fonctionnelles est ce que le sla serait adapter? Merci à tous de votre retour
-
Bonjour à tous, merci pour vos conseils. Au final je suis passé sur un magnet fit qui élimine les pneufit. Montage effectué hier et pour le moment RAS
-
Bonjour à tous, je me permets de poster ici. J'ai acquis une tevo tornado gold dès sa sortie. Au niveau modif, pour le moment je lui une plaque mamorubot et une carte SKR 1.3 avec des tmc 2209. la machine à quelques centaines d'heure d'impression. Je commence à avoir des soucis au niveau de l'extrudeur avec des pignons qui commence à fatiguer. J'ai également le pneufit de l'extrudeur qui ne tient absolument plus. Je souhaiterais faire un upgrade de l'extrudeur ainsi que de la tête d'impression au passage. Qu'avez vous en modifs à me conseiller? Est-il utile de passer en direct drive? Merci à tous pour vos conseils
-
e3dv6 Essai et retours E3D V6 TriangleLab
bob6199 en réponse au topic de deamoncrack dans Tutoriels et améliorations pour Alfawise / Longer3D
Bonjour à tous. je suis à faire le montage de cette tête sur ma cr10. j'ai un soucis au niveau du montage. une fois le clip noir mis dans la tête, je n'arrive pas à descendre mon ptfe jusqu'au heatbreak. comment avez vous procédé? merci à tous -
Plateau d'impression Mamorubot
bob6199 en réponse au topic de yahyah206 dans Discussion sur les imprimantes 3D
@xavax j'ai trouvé les profilé en magasin de bricolage -
32 bits Tornado Gold upgrade SKR 1.3 TMC2208 ou 2209
bob6199 en réponse au topic de bob6199 dans TEVO 3D / TevoUP
Salut, pas de soucis si tu as des question à poser -
Plateau d'impression Mamorubot
bob6199 en réponse au topic de yahyah206 dans Discussion sur les imprimantes 3D
Bonjour à tous, j'ai également équiper ma tevo tornado d'une plaque mamorubot. l'accroche est parfaite. j'ai cependant eu un soucis de déformation de la plaque avec la chaleur du bed. j'avais maintenu la plaque avec les traditionnelles pinces mais la plaque se déformai. J'ai ensuite bloqué la plaque avec des profilé plastiques en U de 7mm intérieur sur tout la périphérie du plateau et depuis je n'ai plus aucun soucis. Si mon expérience peut servir à quelqu'un d'autre... -
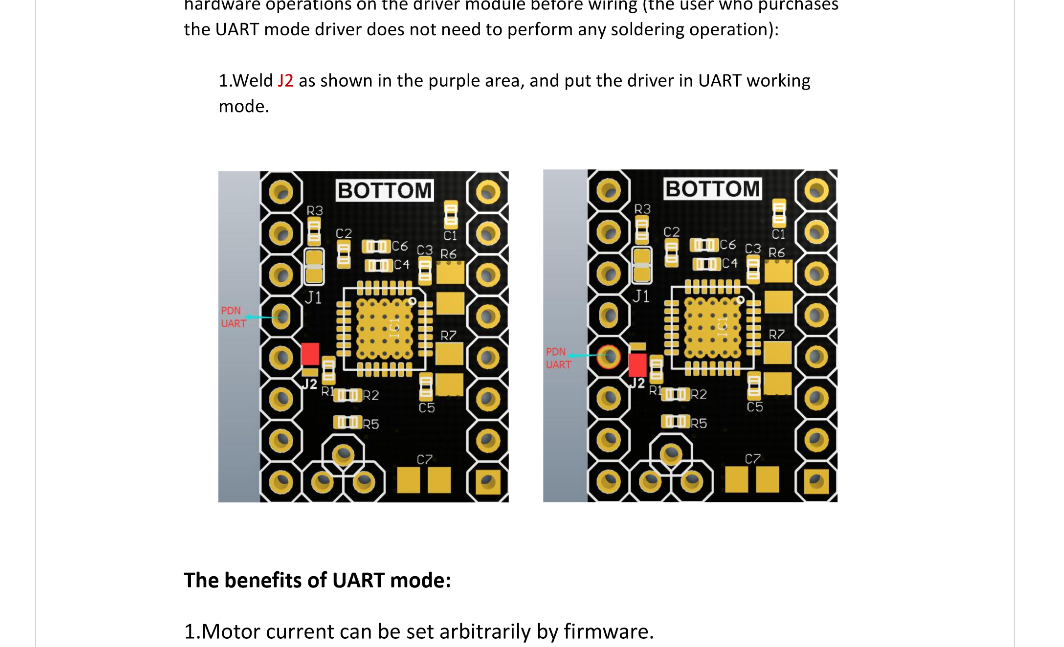
Bonjour, je viens de remarquer que sur les tmc2208 v3.0 vendu par bigtree, il y a déja une petite résistance soudée entre les 2 pins du bas donc c'est ok pour le mode uart merci à tous pour votre aide
-
Super je vous remercie pour ces réponses je m'y attaque dès demain je vais rester sur marlin 2.0 pour le moment, je ne veux pas investir dans rpi
-
en sachant que dans le config_adv de marlin 2.0 je pense que c'est dans ce passage que je dois activer quelque chose j'ai des tmc 2209 en x et y et des tmc 2208 en z et e0 /** * To use TMC2130, TMC2160, TMC2660, TMC5130, TMC5160 stepper drivers in SPI mode * connect your SPI pins to the hardware SPI interface on your board and define * the required CS pins in your `pins_MYBOARD.h` file. (e.g., RAMPS 1.4 uses AUX3 * pins `X_CS_PIN 53`, `Y_CS_PIN 49`, etc.). * You may also use software SPI if you wish to use general purpose IO pins. * * To use TMC2208 stepper UART-configurable stepper drivers connect #_SERIAL_TX_PIN * to the driver side PDN_UART pin with a 1K resistor. * To use the reading capabilities, also connect #_SERIAL_RX_PIN to PDN_UART without * a resistor. * The drivers can also be used with hardware serial. * * TMCStepper library is required to use TMC stepper drivers. * https://github.com/teemuatlut/TMCStepper */ #if HAS_TRINAMIC #define HOLD_MULTIPLIER 0.5 // Scales down the holding current from run current #define INTERPOLATE true // Interpolate X/Y/Z_MICROSTEPS to 256 #if AXIS_IS_TMC(X) #define X_CURRENT 800 // (mA) RMS current. Multiply by 1.414 for peak current. #define X_MICROSTEPS 16 // 0..256 #define X_RSENSE 0.11 #define X_CHAIN_POS 0 // 0 - Not chained, 1 - MCU MOSI connected, 2 - next in chain, ... #endif #if AXIS_IS_TMC(X2) #define X2_CURRENT 800 #define X2_MICROSTEPS 16 #define X2_RSENSE 0.11 #define X2_CHAIN_POS 0 #endif #if AXIS_IS_TMC(Y) #define Y_CURRENT 800 #define Y_MICROSTEPS 16 #define Y_RSENSE 0.11 #define Y_CHAIN_POS 0 #endif #if AXIS_IS_TMC(Y2) #define Y2_CURRENT 800 #define Y2_MICROSTEPS 16 #define Y2_RSENSE 0.11 #define Y2_CHAIN_POS 0 #endif #if AXIS_IS_TMC(Z) #define Z_CURRENT 800 #define Z_MICROSTEPS 16 #define Z_RSENSE 0.11 #define Z_CHAIN_POS 0 #endif #if AXIS_IS_TMC(Z2) #define Z2_CURRENT 800 #define Z2_MICROSTEPS 16 #define Z2_RSENSE 0.11 #define Z2_CHAIN_POS 0 #endif #if AXIS_IS_TMC(Z3) #define Z3_CURRENT 800 #define Z3_MICROSTEPS 16 #define Z3_RSENSE 0.11 #define Z3_CHAIN_POS 0 #endif #if AXIS_IS_TMC(E0) #define E0_CURRENT 800 #define E0_MICROSTEPS 16 #define E0_RSENSE 0.11 #define E0_CHAIN_POS 0 #endif #if AXIS_IS_TMC(E1) #define E1_CURRENT 800 #define E1_MICROSTEPS 16 #define E1_RSENSE 0.11 #define E1_CHAIN_POS 0 #endif #if AXIS_IS_TMC(E2) #define E2_CURRENT 800 #define E2_MICROSTEPS 16 #define E2_RSENSE 0.11 #define E2_CHAIN_POS 0 #endif #if AXIS_IS_TMC(E3) #define E3_CURRENT 800 #define E3_MICROSTEPS 16 #define E3_RSENSE 0.11 #define E3_CHAIN_POS 0 #endif #if AXIS_IS_TMC(E4) #define E4_CURRENT 800 #define E4_MICROSTEPS 16 #define E4_RSENSE 0.11 #define E4_CHAIN_POS 0 #endif #if AXIS_IS_TMC(E5) #define E5_CURRENT 800 #define E5_MICROSTEPS 16 #define E5_RSENSE 0.11 #define E5_CHAIN_POS 0 #endif /** * Override default SPI pins for TMC2130, TMC2160, TMC2660, TMC5130 and TMC5160 drivers here. * The default pins can be found in your board's pins file. */ //#define X_CS_PIN -1 //#define Y_CS_PIN -1 //#define Z_CS_PIN -1 //#define X2_CS_PIN -1 //#define Y2_CS_PIN -1 //#define Z2_CS_PIN -1 //#define Z3_CS_PIN -1 //#define E0_CS_PIN -1 //#define E1_CS_PIN -1 //#define E2_CS_PIN -1 //#define E3_CS_PIN -1 //#define E4_CS_PIN -1 //#define E5_CS_PIN -1 /** * Software option for SPI driven drivers (TMC2130, TMC2160, TMC2660, TMC5130 and TMC5160). * The default SW SPI pins are defined the respective pins files, * but you can override or define them here. */ //#define TMC_USE_SW_SPI //#define TMC_SW_MOSI -1 //#define TMC_SW_MISO -1 //#define TMC_SW_SCK -1 /** * Four TMC2209 drivers can use the same HW/SW serial port with hardware configured addresses. * Set the address using jumpers on pins MS1 and MS2. * Address | MS1 | MS2 * 0 | LOW | LOW * 1 | HIGH | LOW * 2 | LOW | HIGH * 3 | HIGH | HIGH * * Set *_SERIAL_TX_PIN and *_SERIAL_RX_PIN to match for all drivers * on the same serial port, either here or in your board's pins file. */ #define X_SLAVE_ADDRESS 0 #define Y_SLAVE_ADDRESS 0 #define Z_SLAVE_ADDRESS 0 #define X2_SLAVE_ADDRESS 0 #define Y2_SLAVE_ADDRESS 0 #define Z2_SLAVE_ADDRESS 0 #define Z3_SLAVE_ADDRESS 0 #define E0_SLAVE_ADDRESS 0 #define E1_SLAVE_ADDRESS 0 #define E2_SLAVE_ADDRESS 0 #define E3_SLAVE_ADDRESS 0 #define E4_SLAVE_ADDRESS 0 #define E5_SLAVE_ADDRESS 0
-
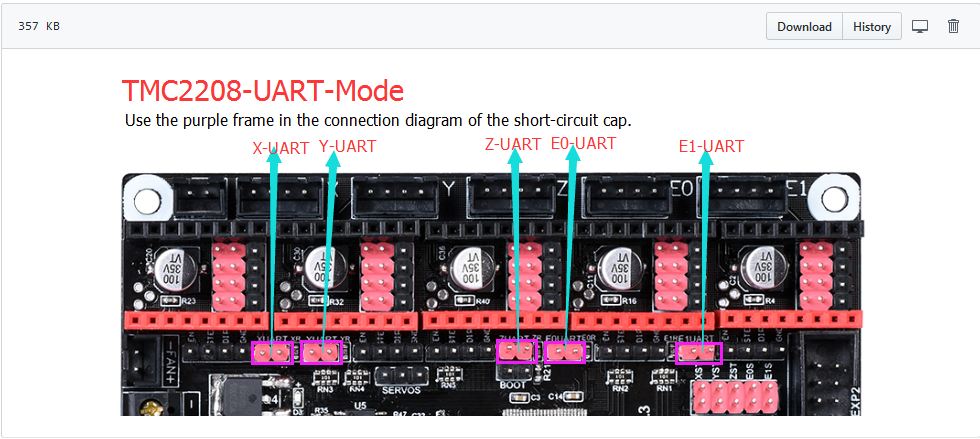
Merci pour vos réponse mais ce n'est pas tout à fait la même carte sur la skr 1.3 on a des cavalier à mettre pour activer l'uart comme ceci du coup il doit certainement avoir une pins a souder à privilégier par rapport à l'autre
-
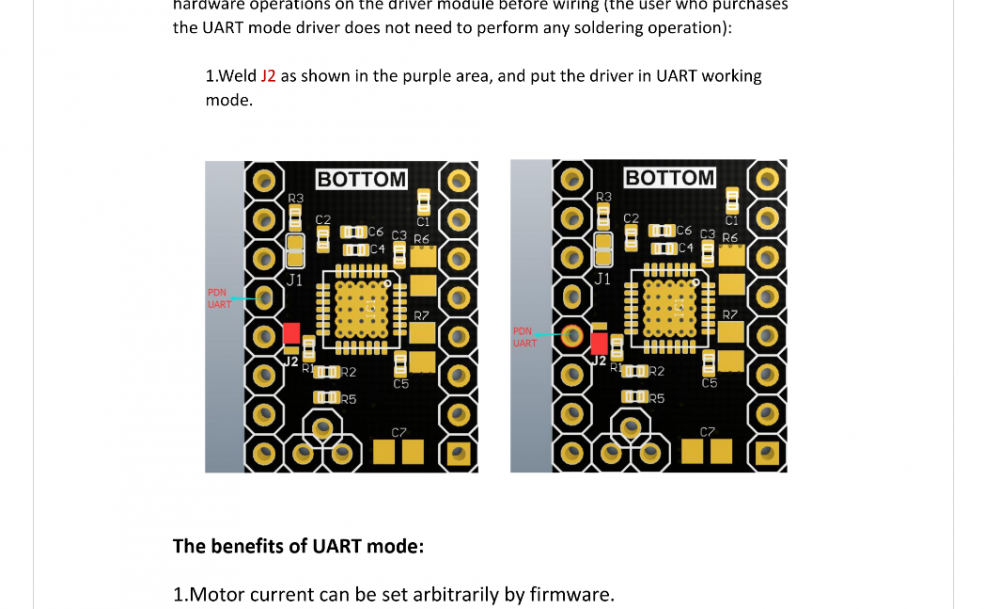
Bonjour à tous, je souhaite installer des tmc 2208 sur ma skr 1.3 en mode uart. je vois qu'il faut souder les pins sur le dessous du tmc. lorsque je regarde la doc de bigtree il est possible de souder de 2 façons, laquelle dois-je utiliser pour la skr 1.3?
-
32 bits Tornado Gold upgrade SKR 1.3 TMC2208 ou 2209
bob6199 en réponse au topic de bob6199 dans TEVO 3D / TevoUP
Bonjour, merci pour ces infos effectivement pour le ventilo, j'ai affecté les pins et du coup tout est rentré dans l'ordre. pour les tmc 2209, tu avais aussi raison , j'avais une vieille version de marlin 2.0 quelles sont les options à activer pour les tmc 2209 en sachant que je les ai installer sur X et Y. le Z et E0 sont resté en tmc2208. je dois également changer ma buse de tornado car après avoir passer du g-fil carbon celle-ci est usée, quelles buses sont compatibles avec notre hotend stock?