shark-h44
-
Compteur de contenus
22 -
Inscrit(e) le
-
Dernière visite
Récompenses de shark-h44
")





-
Bonjour, As-tu trouvé réponse à ton problème ? Sinon, je peux peut-être t'aider avec la conf de mon hypercube
-
Bonjour, Désolé pour le déterrage de post, mais tu as peut-être la réponse à une question que je me pose : Est ce que l'ordre est bien le suivant : DIGIPOT_I2C_MOTOR_CURRENT { X, Y, Z, E0, E1} ? Car d'après certains forum, il semblerait que sur SBASE le Z soit après les extrudeurs ? Merci
-
Bonjour, J'ai également monté ce modèle, pour ma part je suis un peu plus avancé car la machine tourne. Sauf que ça n'imprime pas très bien (décalage dans les sens X et Y) et je n'arrive pas à trouver les bon réglages. Ayant mit des axes chinois (lège faux rond) les mouvement ne sont pas aussi fluides sur la mienne Bref, grosse déception au rendez-vous, pas mal de temps et d'argent dépensé pour un résultat pire que mon Anet A6... La conception n'a pas l'air d'être assez rigide entre les axe X et Y, ce qui fait que le chariot arrive a se mettre en porte a faux avec les fameux décalages à l'arrivée.
-
Bonjour, On me corrigera si je me trompe, mais pour moi il faudra changer la carte mère. Ou à minima changer le firmware pour implémenter cette fonctionnalité
-

Hypercube evolution ngen galère config marlin 2
shark-h44 en réponse au topic de lionelk dans Le coin des Cubiques
Vérifie ton paramétrage pull up pull down pour tes différents end-stop. Si tu les vois en faisant un M119, c'est qu'ils sont pris en compte Par contre c'est normal que les moteurs fonctionnent quand c'est open, ils doivent s’arrêter sur trigger -
marlin Décalage irrégulier sur axe Y
shark-h44 en réponse au topic de shark-h44 dans Paramétrer et contrôler son imprimante 3D
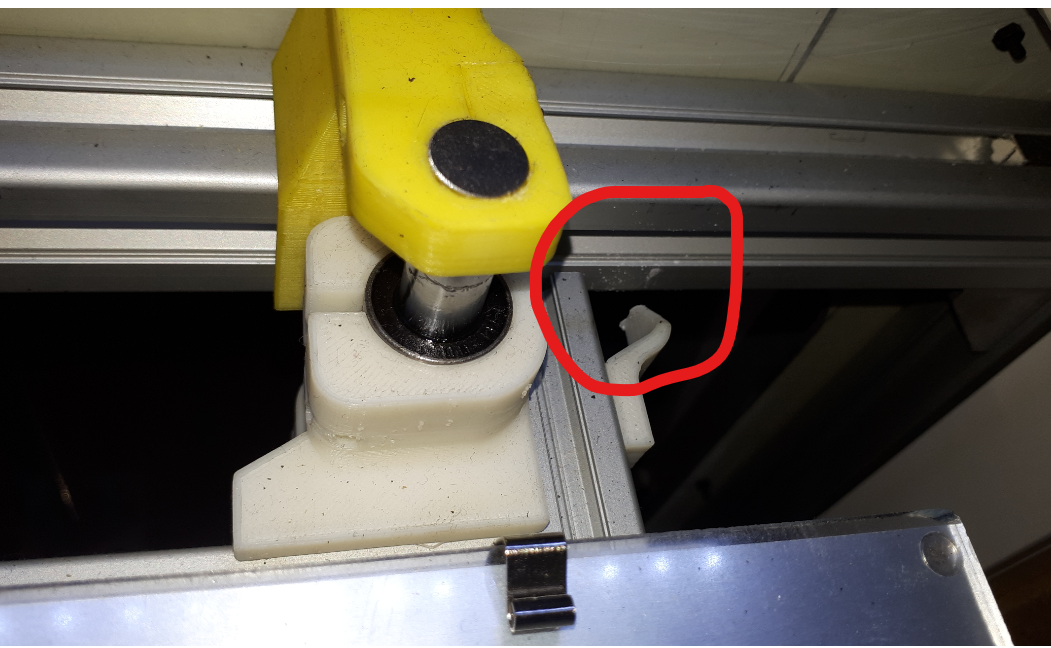
Salut Merci @pafpaf et @Yo', j'ai abaissé les paramètres de Jerk et d’accélération, la machine parait plus douce, ce n'est que positif. Pour ce qui est de mon problème original, le soucis était en fait d'ordre mécanique. Ma butée Z qui était réglée trop proche du châssis, a force de tourner la mécanique a prit un peu de jeu en se mettant en place et hop ça s'est mis a légèrement frotter ce qui méttait le plateau légèrement de travers.. Bref, problème bête dont je me suis aperçu en retirant le dessus de l'imprimante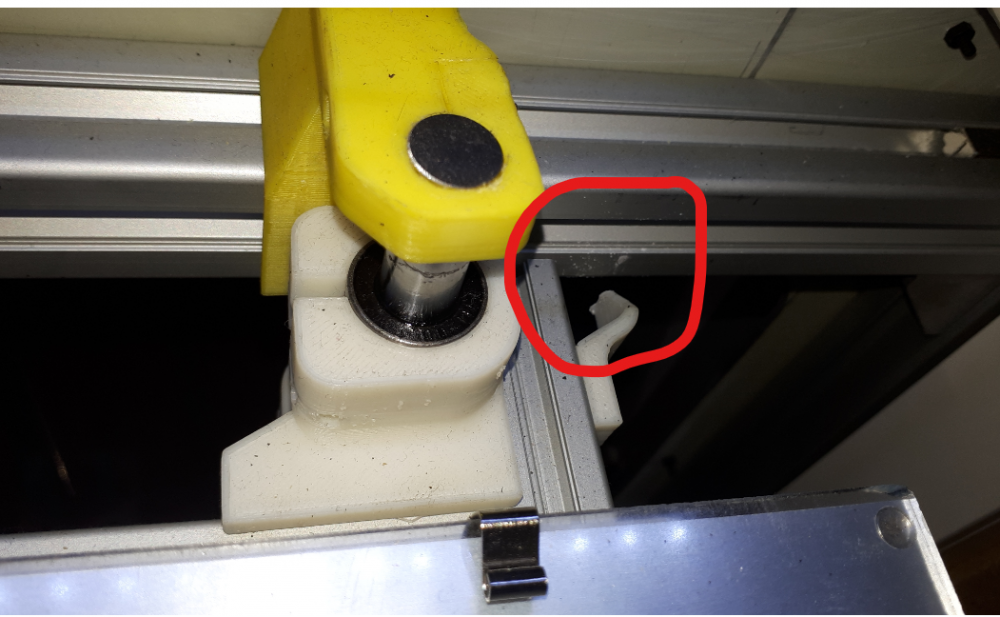
- 11 réponses
-
- 1
-

-
- corexy; hypercube
- decalage dimpression
- (et 1 en plus)
-
Bonjour @Heldmann Si tu as changé tes câbles vérifie l'ordre des couleurs des fils (des 2 cotés des connecteurs). J'ai déjà eu des fils inversés sur des câbles achetés sur des sites chinois.
-
marlin Décalage irrégulier sur axe Y
shark-h44 en réponse au topic de shark-h44 dans Paramétrer et contrôler son imprimante 3D
@Yo' Merci pour ton retour, j'avoue ne pas maîtriser l'impact du Jerk, ni même vraiment à ce quoi cela correspond. Tu me conseil quoi comme paramètre de jerk / accélération ? @pafpaf Content d'avoir pu t'aider. Pourquoi dis-tu que mon problème est sur le X (pour moi ça décale un peu sur les 2, mais plus sur X) Comment as-tu détecté les micro coupures dû aux vibrations ? -
Hypercube evolution ngen galère config marlin 2
shark-h44 en réponse au topic de lionelk dans Le coin des Cubiques
Salut, Pour ma part j'ai un capteur pour Ymin (mécanique en face avant, j'ai modélisé un support si ça t’intéresse), Un capteur photo sur le chariot pour le Xmin (emplacement prévu) et un Zmax photo (qui ne sert pas vraiment pour le moment). Je fais mon Zmin à partir du BL Touch, ça fonctionne bien. Pour info j'ai pas mal galéré à passer mon X en face avant, mais là c'est bon. Je suis en Marlin 2.0 (carte MKS Sbase) L'ensemble fonctionne, mais j'ai des soucis de décalages sur l'axe Y (j'ai un post en cours). Sinon, je n'ai jamais eu besoin de la commande M122. Ma config si ça peut t'aider : https://github.com/shark-h44/Hypercube_marlin/tree/master/Marlin -
Hypercube evolution ngen galère config marlin 2
shark-h44 en réponse au topic de lionelk dans Le coin des Cubiques
Bonjour @lionelk Je suis en cours de finalisation du montage de la mienne (même modèle). As-tu trouvé réponse à tes problèmes ? On pourrait peut-être s'entraider -
marlin Décalage irrégulier sur axe Y
shark-h44 en réponse au topic de shark-h44 dans Paramétrer et contrôler son imprimante 3D
Salut Tout d'abord merci pour vos pistes de recherche Plus j'y pense, plus je pense que cela vient des paramètre Jerk, mais je ne sais pas comment tester ça de façon "non empirique" Pour info le cube à était imprimé à 100mm/s, résultats similaire à 60mm/s, vous me recommandez quoi comme vitesse d'impression ? @pafpaf Les micro-coupures sont en effet possibles surtout sur des transformateurs en campagne (je suis en ville), je te conseil de mettre des condensateurs pour stabiliser la tension et venir compenser les micro-coupures du genre de cette petite carte : Mini UPS Pour ce qui est de la version de Marlin, si je ne dis pas de bêtises pour les cartes 32bits comme la MKS Sbase on est obligé de passer en V2.x Pour ligne DIGIPOT_I2C_MOTOR_CURRENTS, c'est la numéro 760 d mon fichier https://github.com/shark-h44/Hypercube_marlin/blob/master/Marlin/Configuration_adv.h. Pour info, c'est le seul moyen que j'ai trouvé pour modifier les ampérages des moteurs (pas de vis de réglage physique), quand j'augment ou je laisse les valeurs par défaut (après avoir activé la fonction) les moteurs chauffent donc à priori ça fonctionne. J'ai juste un doute sur l'ordre (si quelqu'un à l'info ?? @Yo' Je les ai contrôles au montage, ils ont un très lège faux rond à peine perceptible, en tout cas toute la mécanique coulisse sans forcer, pas de chocs depuis.- 11 réponses
-
- 1
-
-
- corexy; hypercube
- decalage dimpression
- (et 1 en plus)
-
marlin Décalage irrégulier sur axe Y
shark-h44 a posté un sujet dans Paramétrer et contrôler son imprimante 3D
Bonjour, J'ai un souci avec ma coreXY (modéle hypercube NGEN NEDALIVE) monté par mes soins (carte mére MKS SBASE). Après une longue phase de montage je me suis aperçu lors des tests que mes impressions sont irrégulières (surtout au niveau de l'axe Y) Je post dans la rubrique Marlin car il semble (à première vue) que cela puisse venir du firmware car pas mal de personnes s'en plaignent sans vraiment trouver de solution. Voilà ce que j'obtiens, ce n'est pas dramatique mais tout de même gênant pour faire des assemblages Voilà ce que j'ai déjà tenté : Tension des courroies : tendues sans excès poulies : bien serrée, pas de dents abîmé. Ampérage driver : passage de 0.7A à 0.5A (DIGIPOT_I2C_MOTOR_CURRENTS { 0.5, 0.5, 1.0, 0.5, 0.5 }) je ne suis pas sûr de l'ordre (x, y ,z, e1, e2) ? J'ai tenté la dernière version de Marlin BugFixe, le décalage est encore plus prononcé. Ma config Marlin : https://github.com/shark-h44/Hypercube_marlin/tree/master/Marlin Je ne sais plus où regarder, merci de bien vouloir vous pencher sur mon problème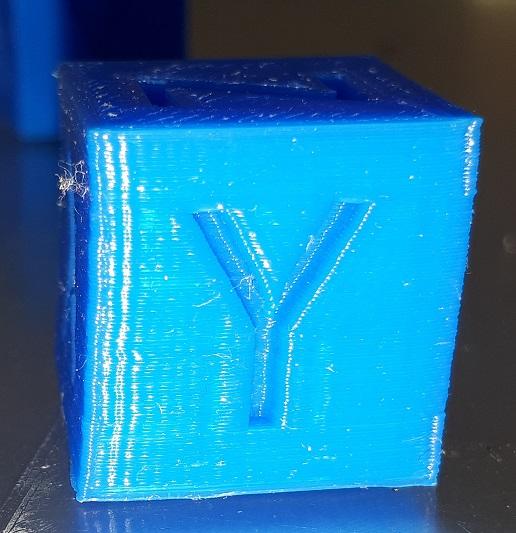
-
Bonjour, J'aurais besoin de votre aide J'ai installé une Sbase (avec un tft35) sur mon anet A6, jusque là tout va bien, j'ai configuré les fonctions de base, réussi à imprimé un cube de calibration (pas pire que celui fait avec la carte anet). Là où ça ce gatte, c'est quand j'ai voulu installer mon bl-touch chinois: Installation physique : OK Branchement : OK Tests (monté, descente, mise en alarme, mode test) : OK J'ai commencé par tenter une recherche du bed via la sonde (sans ZendStop) après quelques frayeurs j'ai décidé de laisser tomber cette approche, trop risqué pour la mécanique, en plus j'ai l'impression que l'écart entre la sonde et le bed varie ? J'ai ensuite remis mon ZenStop en plus de ma sonde bl touch, le soucis est le suivant : Une fois fait le home G28 la buse se calle au plus proche du bed (je l'ai réglé pour avoir 0.2mm). Quand je lance le G32, la tête se déplace en X et Y pour aller chercher le premier point de palpage (triangle) Le Z ne remontant pas (et la sonde étant plus basse) celle-ci vient accrocher le bed, quand je l'aide à passer à la main, elle est quand même trop proche et le capteur passe en alarme. j'ai tenté de remonté le z entre le g28 et le g32, mais quand je fais un g32, il refait systématiquement un home et le problème est identique. J'ai également tenté de modifier le paramètre zprobe.probe_height, rien n'y fait ??? Merci d'avance de vous pencher sur mon problème (je n'ai pas trouvé de cas similaire sur le forum). config.txt
-
Après une petite étude, je suis assez sensible aux arguments de @Maeke concernant l'espace mémoire dispo, on pourrais imaginer venir interfacer une mémoire flash en SPI comme sur un ESP8266 ou ESP32, mais cela n'aurait pas de sens, autant changer de carte. @jmarie3D, tu as raison, les Nextions sont chers par rapport à ce que pourrait offrir un ensemble carte + afficheur MKS... Du coup, maintenant, je pencherais plus vers la réalisation d'une imprimante de A à Z de type cubique (cela me parait plus stable), j'y mettrai une MKS pour avoir mon tactile couleur
-
Tu peux développer ? Je n'ai pas encore trop creusé la question, mais je ne vois pas trop le problème, si ce ne sont que des messages échangés sur le port série, le traitement graphique étant (de ce que j'en ai compris) traité par l'afficheur en lui même. Reste le problème de l'alimentation, de l'afficheur --> 250mA sous 5v d'après la datasheet du modèle 4.3". Car cela risque en effet de tirer sur le régulateur de la carte mère. Pour ça il suffit de se prendre directement sur l'alim 12v en passant par un régulateur 5v et en reliant les masses, puis plus de problèmes. Sinon sur le principe si je tente la chose, un retour vous intéresse t-il ?