Srat
-
Compteur de contenus
71 -
Inscrit(e) le
-
Dernière visite
Récompenses de Srat
")





-
Apres moutle difficulté j'ai reussi. pour les curieux voici le FMW modifier dans marlin 2.1.0 avec prise en charge du BL touch le pin a rancher dans Marlin/src/pins/ramps . et pour les flemar la version .hex pins_LONGER3D_LKx_PRO.h Configuration_adv.h Configuration.h firmware.hex
-
Tu a quoi comme message d'erreur ou alors l'ecran fait quoi comme comportement ? Quand il charge cela est instantané ou il charge pendent 10 ou 20 seconde avant de faire END ?
-
Je vais tester on sera vite fixer. En tout cas un GRAND merci pour ton aide et ta reactivité.
-
Etrange la derniere fois tu disait l'inverse ... j'ai mal compris ?
-
donc du coup si cela n'est pas utiliser je ne comprend pas comment marlin gere a la fois le contact sec pour la presence de fil et le codeur pour le mouvement du fil ?
-
hello , effectivement il faut savoir si tu as bien fait les modif dans le FMW de la carte mere car c'est elle qui gere le BL touch . l'ecran n'est que l'interface de commande. Pour ma part j'ai fait ces update et cela marche tres bien : pour la carte mere : https://github.com/Guizz27/Marlin---Longer-LKx-Pro Pour l'ecran : https://github.com/boromyr/LK4-Pro-Screen-Theme. si tu souhaite je doit avoir dans mes archives le tutoriel pour changer les visuel mes de memoire cela n'est pas evident a faire.
-
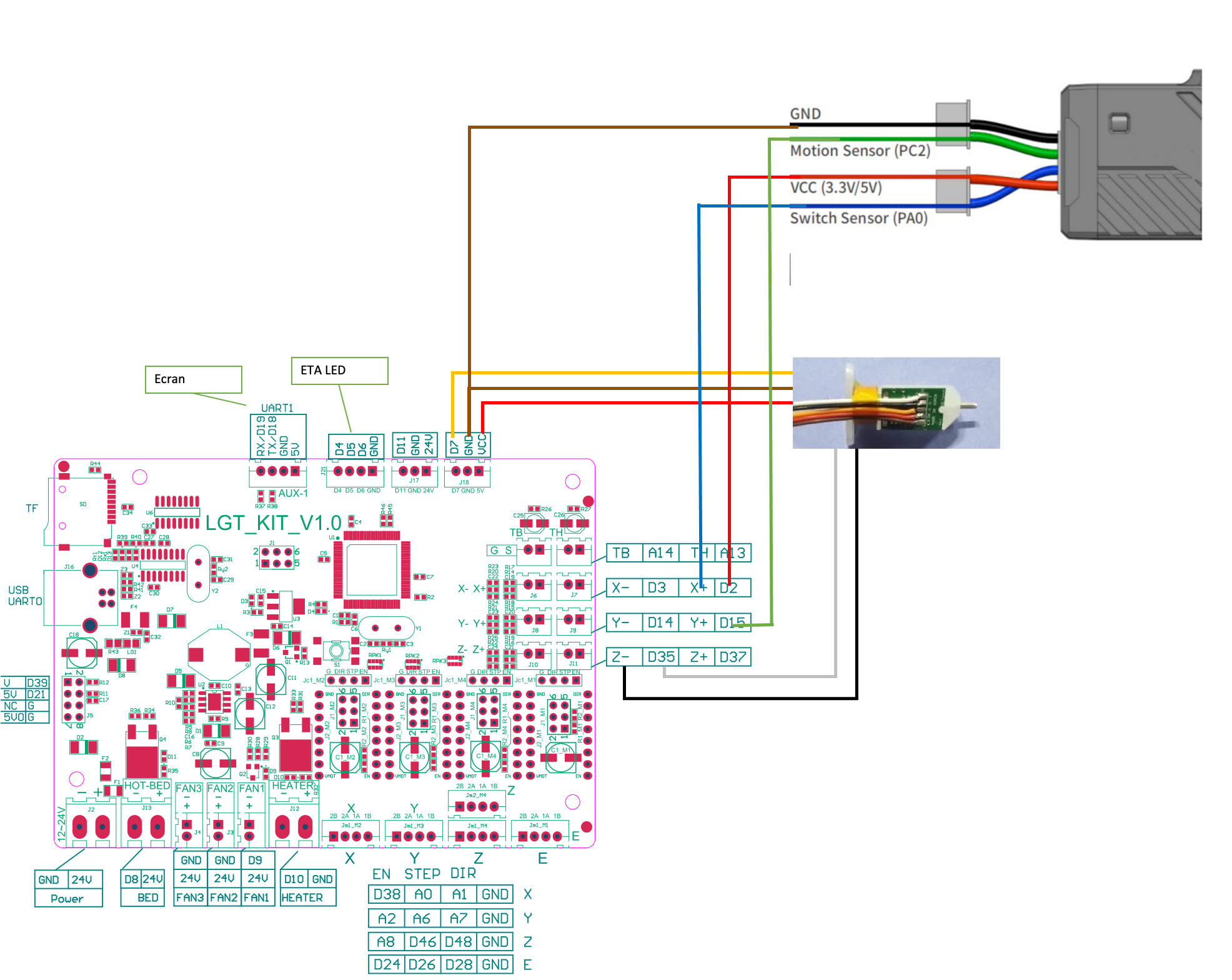
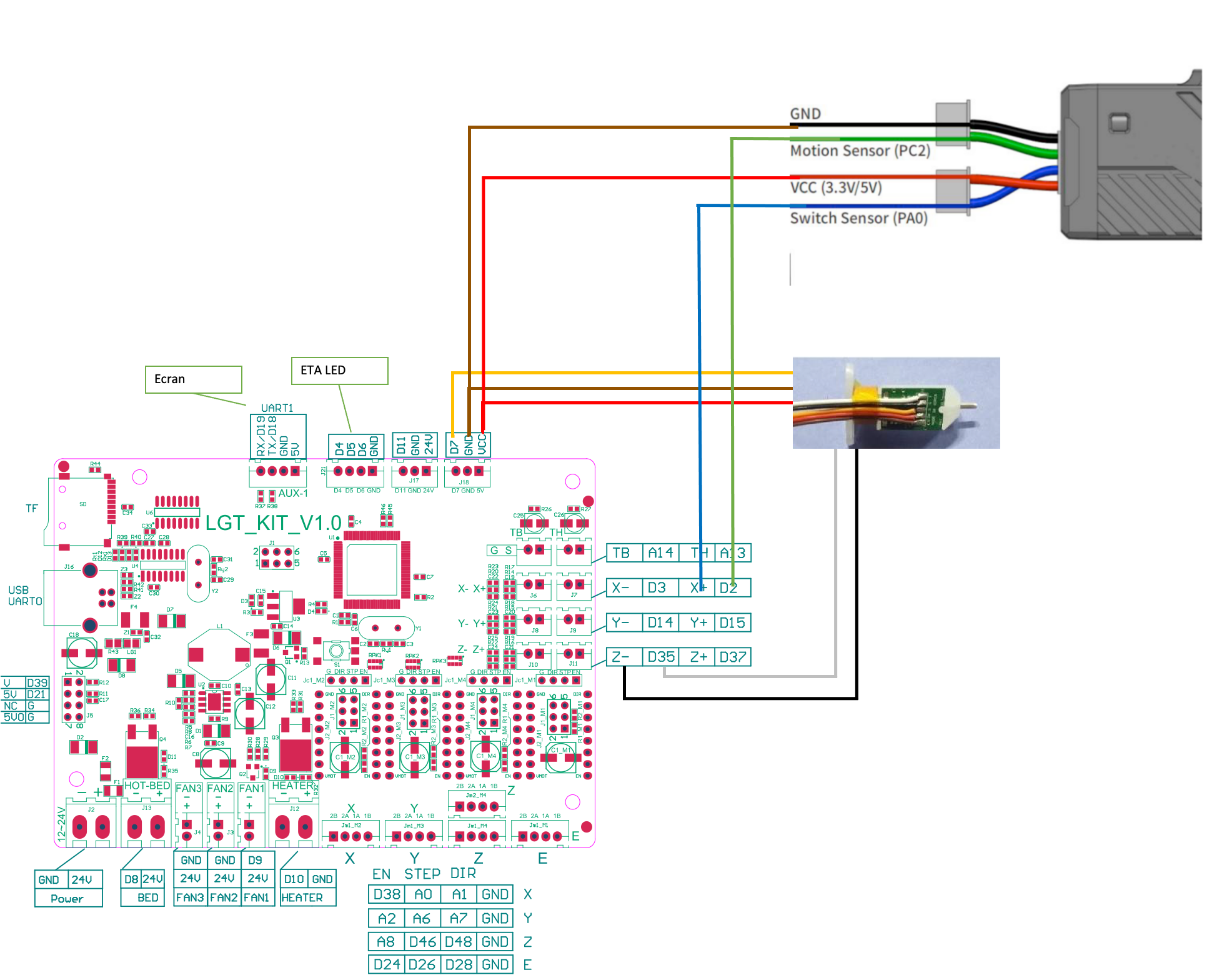
Je pense que je vais vais essayer. pour Marlin je suppose qui faut que je modifie la pin pc2 de l’exemple par D15 ? Voici la partie de marlin que je pense mettre sur le runout : (marlin 2.1) dit moi si cela te semble correct ? A la base mon FMW est celui ci : https://github.com/Guizz27/Marlin---Longer-LKx-Pro/blob/2.1.x/Marlin/Configuration.h#L119 /** * Filament Runout Sensors * Mechanical or opto endstops are used to check for the presence of filament. * * IMPORTANT: Runout will only trigger if Marlin is aware that a print job is running. * Marlin knows a print job is running when: * 1. Running a print job from media started with M24. * 2. The Print Job Timer has been started with M75. * 3. The heaters were turned on and PRINTJOB_TIMER_AUTOSTART is enabled. * * RAMPS-based boards use SERVO3_PIN for the first runout sensor. * For other boards you may need to define FIL_RUNOUT_PIN, FIL_RUNOUT2_PIN, etc. */ #define FILAMENT_RUNOUT_SENSOR // had a filament runout sensor #if ENABLED(FILAMENT_RUNOUT_SENSOR) #define FIL_RUNOUT_ENABLED_DEFAULT true // Enable the sensor on startup. Override with M412 followed by M500. #define NUM_RUNOUT_SENSORS 1 // Number of sensors, up to one per extruder. Define a FIL_RUNOUT#_PIN for each. #define FIL_RUNOUT_STATE LOW //MODIFIER A LA BASE HIGH// // Pin state indicating that filament is NOT present. #define FIL_RUNOUT_PULLUP // Use internal pullup for filament runout pins. //#define FIL_RUNOUT_PULLDOWN // Use internal pulldown for filament runout pins. //#define WATCH_ALL_RUNOUT_SENSORS // Execute runout script on any triggering sensor, not only for the active extruder. // This is automatically enabled for MIXING_EXTRUDERs. // Override individually if the runout sensors vary //#define FIL_RUNOUT1_STATE LOW //#define FIL_RUNOUT1_PULLUP //#define FIL_RUNOUT1_PULLDOWN //#define FIL_RUNOUT2_STATE LOW //#define FIL_RUNOUT2_PULLUP //#define FIL_RUNOUT2_PULLDOWN //#define FIL_RUNOUT3_STATE LOW //#define FIL_RUNOUT3_PULLUP //#define FIL_RUNOUT3_PULLDOWN //#define FIL_RUNOUT4_STATE LOW //#define FIL_RUNOUT4_PULLUP //#define FIL_RUNOUT4_PULLDOWN //#define FIL_RUNOUT5_STATE LOW //#define FIL_RUNOUT5_PULLUP //#define FIL_RUNOUT5_PULLDOWN //#define FIL_RUNOUT6_STATE LOW //#define FIL_RUNOUT6_PULLUP //#define FIL_RUNOUT6_PULLDOWN //#define FIL_RUNOUT7_STATE LOW //#define FIL_RUNOUT7_PULLUP //#define FIL_RUNOUT7_PULLDOWN //#define FIL_RUNOUT8_STATE LOW //#define FIL_RUNOUT8_PULLUP //#define FIL_RUNOUT8_PULLDOWN // Commands to execute on filament runout. // With multiple runout sensors use the %c placeholder for the current tool in commands (e.g., "M600 T%c") // NOTE: After 'M412 H1' the host handles filament runout and this script does not apply. #define FILAMENT_RUNOUT_SCRIPT "M600" // After a runout is detected, continue printing this length of filament // before executing the runout script. Useful for a sensor at the end of // a feed tube. Requires 4 bytes SRAM per sensor, plus 4 bytes overhead. #define FILAMENT_RUNOUT_DISTANCE_MM 3 // A MODIFIER A LA BASE 25 // set sensitivity, the recommended setting for SFS V2.0 is 3mm, which means if no signal of filament movement is detected after 3mm of filament travel command, filament error will be triggered.// #ifdef FILAMENT_RUNOUT_DISTANCE_MM // Enable this option to use an encoder disc that toggles the runout pin // as the filament moves. (Be sure to set FILAMENT_RUNOUT_DISTANCE_MM // large enough to avoid false positives.) //A AJOUTER// #define FILAMENT_MOTION_SENSOR // set encoder type #if ENABLED (FILAMENT_MOTION_SENSOR) #define FILAMENT_SWITCH_AND_MOTION // Enable both SWITCH and MOTION #if ENABLED (FILAMENT_SWITCH_AND_MOTION) #define NUM_MOTION_SENSOR 1 #define FIL_MOTION1_PIN D15 // set motion pin to actual GPIO of motherboard #endif #endif
-
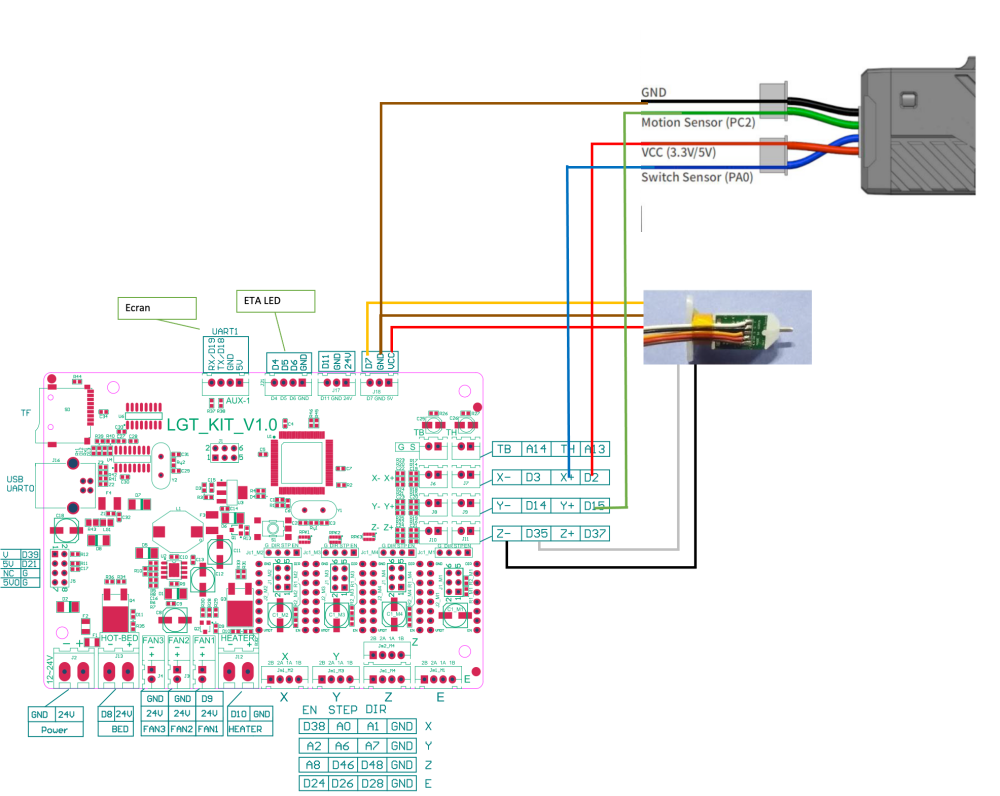
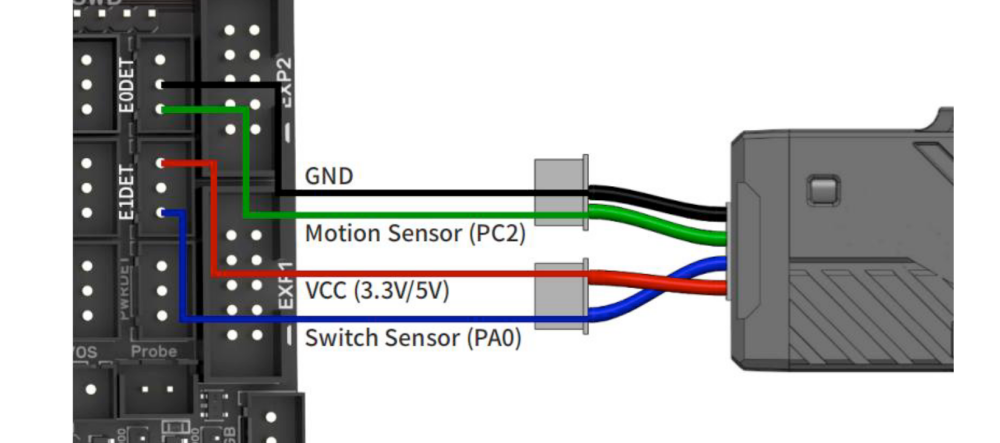
Merci pour ton retour et d'avoir pris le temps de modifier le schema. j'ai regarder quelques vidéos et si j'ai bien compris marlin ne peu pas géré les 2 fonctions (Absence de filament , et mouvement du filament.) tu confirme ? Il conseille d'utiliser le motion sensor comme decteur de filament. mais dans les modif demandé dans marlin j'ai bien l'impression qu'il y a les 2. https://github.com/bigtreetech/smart-filament-detection-module#bigtreetech-sfs-v20 iii uncomment #define FILAMENT_MOTION_SENSOR iv uncomment #define FILAMENT_SWITCH_AND_MOTION je suis un peu perdu . pour le shema si j'ai bien compris les bornes carée sont le 5v? donc ce cablage devrait etre bon ? ( pas a decablé la pris rouge bleu) Si tu aas une piste d'un detecgeur de fin de couse qui s'adapte plus simplent je suis preuneur. les longer sont a 20 euros les 2 ... je trouve cela tres chere pour un simple contact sec.
-
Donc ce branchement devrait etre bon ?

-
Petite erreur c’est une u30 pro mais je pense que cela ne change pas grand chose
-
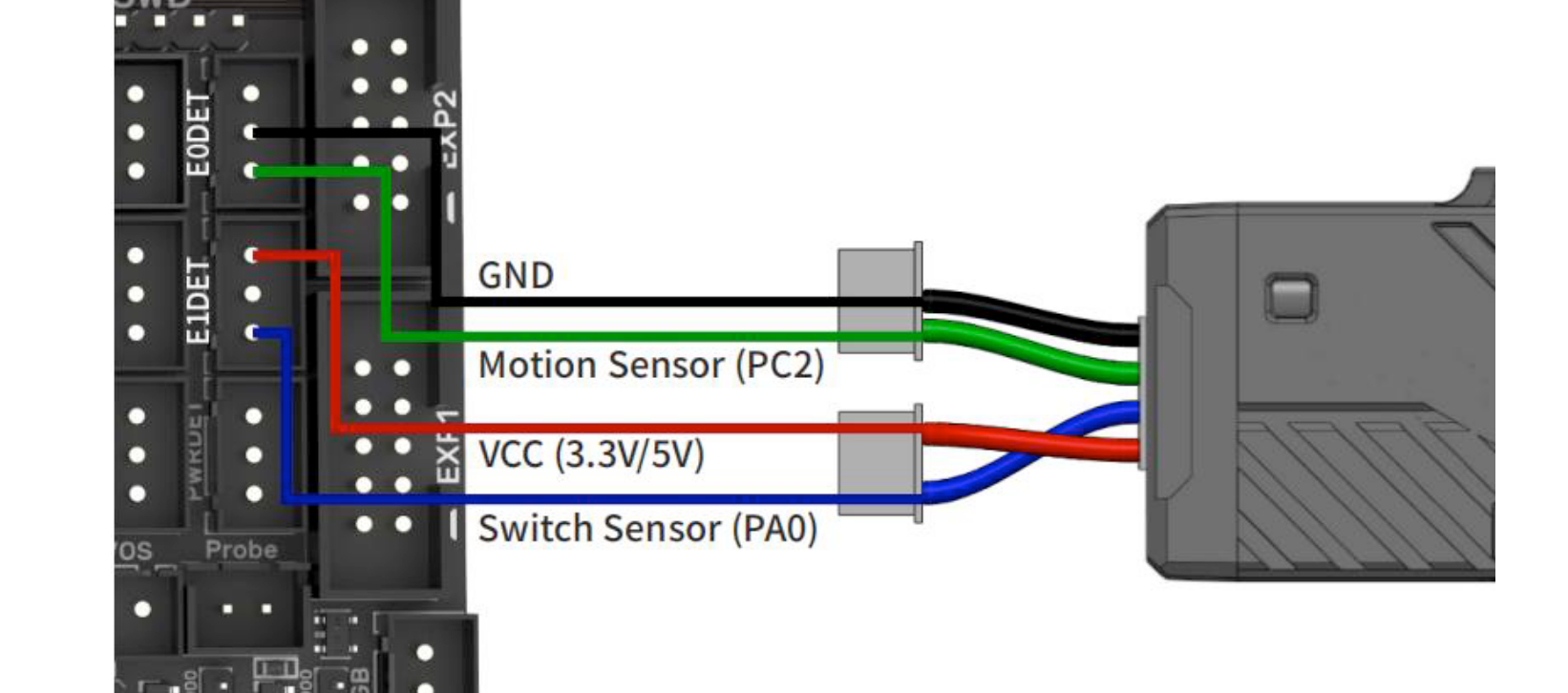
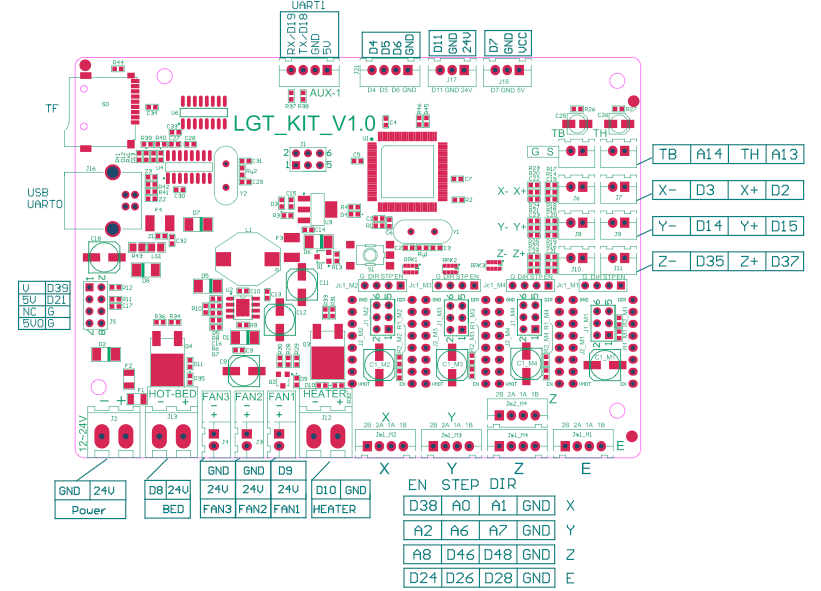
bonjour le capteur de filament de ma U40 se met en defaut alors qu'il ni pas de probleme. Je l'ai desactivé pour le moment mais je souhaiterai le changer par celui ci BIGTREETECH Smart Filament Sensor V2.0. mais je ne suis pas certain que ma carte est compatible et ou le branché. pour info j'ai deja un bl touche; ma carte est une LGT KIT V1.0 ci dessous le schema du capteur Merci pour votre aide.
-
octoprint Octoprint sur Nas Synology
Srat en réponse au topic de Srat dans Paramétrer et contrôler son imprimante 3D
Je n'ai jamais reussi a le faire tourner non plus -
[Tuto] Installer un "3d Touch" sur U30 Pro ou LK4 Pro.
Srat en réponse au topic de Legeantbleu dans Tutoriels et améliorations pour Alfawise / Longer3D
je ne suis pas un specialiste mais a mon avis il te faut egalement un M501 apres le M500 -
[U30 pro] cable extension MicroSD - comportement bizarre
Srat en réponse au topic de Disco dans Alfawise / Longer3D
perso j'ai le meme soucis sur ma U30 pro je pense que le port MicroSd de l'imprimante a un mecanisme de detection d'insertion de la carte SD. du cout avec le cable d'extension il ne detect pas le changement et ne rafraichi pas le contenu. d'autre on le meme probleme ? -
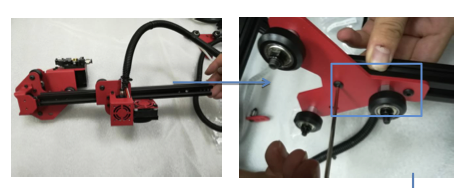
il faut jouer avec la roue qui a un ecrou excentrique. Cela va te permettre de plaquer les 3 roues sur le rail.