Auberjine Albinos
-
Compteur de contenus
10 -
Inscrit(e) le
-
Dernière visite
Récompenses de Auberjine Albinos
")





-
Je ne vois personne qui parle d’accélération, c’est pourtant fondamental sur la partie mécanique, parce que donner une consigne de vitesse élevée c’est bien (sur une bonne machine ce sont d’ailleurs le débit d’extrusion et la capacité de refroidissement qui vont limiter la vitesse d’impression) mais l’atteindre c’est mieux, parce que c’est ça qui va au final réduire le temps d’impression, la vitesse moyenne en quelque sorte Un exemple de calcul détaillé ici (à 3000mms⁻² il faut 15mm pour atteindre 300mms⁻¹) C’est pour ça que les gens qui font des impressions très rapides essaient avant tout d’avoir les accélérations/décélérations les plus élevées, c’est ça qui est difficile pas la vitesse en elle même, et c’est ça qui permet d’imprimer en pratique à haute vitesse avec une qualité malgré tout correcte Par exemple ici la vitesse d’impression va jusqu’à 500mms⁻¹ mais c’est surtout l’accélération qui est démentielle à 140’000mms⁻² Autre exemple avec des réglages plus extrêmes pour donner une idée des possibilités (évidemment pas utilisable en pratique je vois venir les rabat-joie d’ici)
-

Buses Bondtech CHT
Auberjine Albinos en réponse au topic de ixi dans Discussion sur les imprimantes 3D
Un exemple de ce que cela peut donner en 1,8mm, avec un LGX Lite et une Magnum+, il dit qu’il a essayé jusqu’à 95mm³s⁻¹ mais qu’il commençait à avoir de gros soucis de refroidissement Après effectivement la Magnum+ c’est du sacré matériel haha -
Projet Table XY de trés haute précision
Auberjine Albinos en réponse au topic de Agachoun dans Le coin des Cubiques
On est d’accord que le mieux est d’utiliser des encodeurs linéaires, et effectivement plutôt du CrossXY que du CoreXY Mais avec des mouvements lents vous pensez que l’élasticité poserait quand même problème ? Oui pour une calibration, mais comment feriez-vous en pratique pour 20µm ? Dans l’idéal il faudrait le faire avec le plus de points possible, pas seulement à 300mm Au final je me demande si la précision de ±10µm n’est pas surdimensionnée, si il s’agit de prise d’image au microscope une précision plus faible suffirait probablement en prévoyant un ajustement manuel vu que la résolution du système de motorisation serait certainement de quelques microns. Fermer la boucle par l’opérateur en quelque sorte -
Projet Table XY de trés haute précision
Auberjine Albinos en réponse au topic de Agachoun dans Le coin des Cubiques
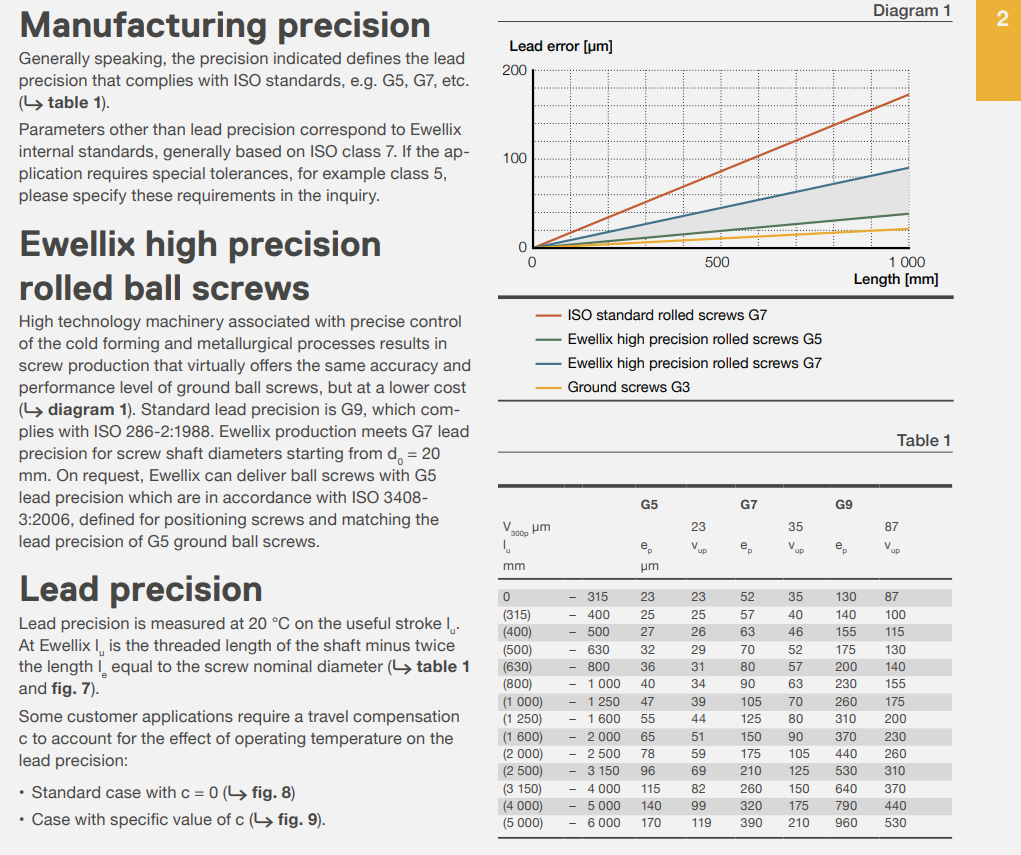
Attention avoir ±0.01mm sur 300mm en circuit ouvert ce n’est pas si simple que ça, voyez ci-dessous les caractéristiques des vis à billes Ewellix (https://medialibrary.ewellix.com/asset/16175) Pour avoir un vrai ±0.01mm le plus simple et économique à mon avis c’est courroie GT2 avec des vraies poulies Gates (pour avoir la meilleure précision) et des mateurs pas à pas avec des encodeurs CUI AMT (après à voir quelle diamètre de poulie pour quelle résolution)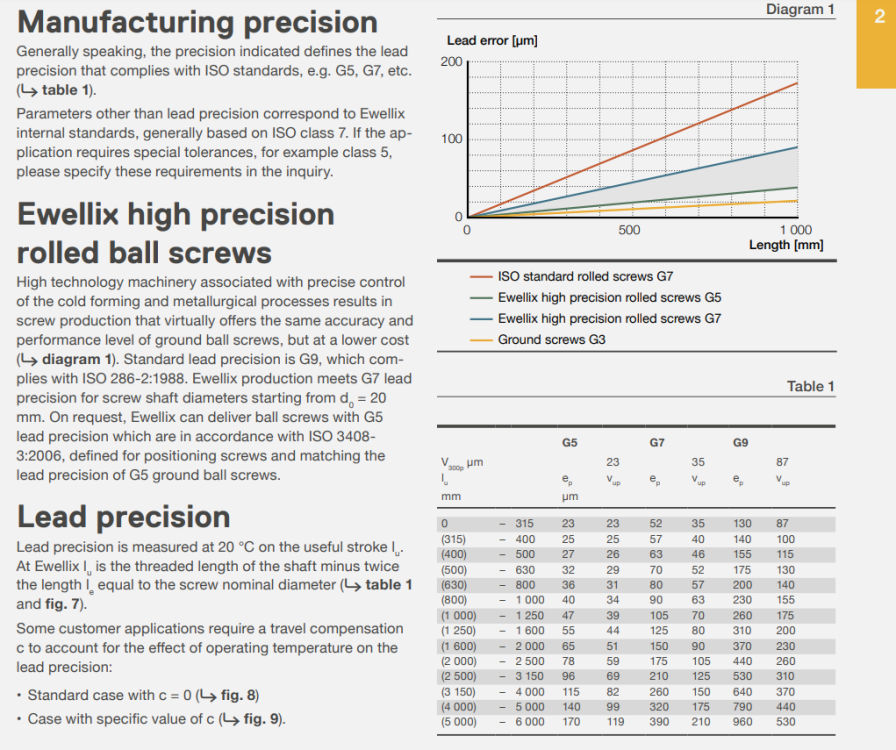
-
Dilemme: Fais La toi_même (DIY) ou imprimante du commerce ?
Auberjine Albinos en réponse au topic de Lorenzo78 dans Bien choisir son imprimante 3D
Le problème des guidages à galets est leur plus grande inertie ce qui limite leur accélération maximale par rapport aux guidages à billes, en échange ils permettent une vitesse plus élevée (mais bon en impression 3D on a besoin d’accélération pas de grande vitesse) Autant avec des galets en POM (donc relativement légers) ça fonctionne autant des métalliques ne semblent pas du tout adaptés, surtout que les charges sont vraiment faibles M’enfin tant qu’on ne cherche pas la vitesse ça ne doit pas poser de soucis -
Oups oui en effet j’ai essayé avec une autre adresse mail et le code ne passe plus, pourtant je l’ai fait hier sans soucis x)
-
Boujour à tous Peut-être le savez-vous déjà mais il est possible d’obtenir une licence pour Solidworks Education d’un an à compter de l’activation en tant qu’amateur ici : https://www.solidworks.com/support/community-download Sélectionnez «No» dans Personnal Information et rentrez le code «9MAKER», et vous obtiendrez un numéro de licence Si certains veulent découvrir Solidworks, ou l’utiliser chez eux sans piratage
-
Il a pris des guidages précontraints donc pas de soucis de jeu/hystérésis, et puis ça reste de l’impression 3D il ne faut pas l’oublier, avec des buses de mini 150µm on n’est pas au micron près x)
-
Une hyper cube pour un débutant !
Auberjine Albinos en réponse au topic de Zwitter dans Le coin des Cubiques
Juste par rapport aux moteurs pas à pas il en existe en 200 pas (1.8°) et 400 (0.9° eh !) Les 400 seront bien évidemment plus précis (car le microstepping permet certes de lisser les courbes mais n’est pas vraiment répétable sans encodeur et asservissement), mais également moins rapides ! mais bon en général on préfère avoir de belles pièces bien finies donc les 400 sont très intéressants Quand à la différence nema 17 ou 23, les 17 seront plus rapides et plus réactif, mais les 23 auront beaucoup plus de couple donc si vous envisagez d’installer de la découpe laser et du petit usinage je partirais plus sur des 23 (qui existent aussi en 400 pas) -
Imprimante grand format abordable
Auberjine Albinos en réponse au topic de Kimlicrea dans Bien choisir son imprimante 3D
Pour imprimer spécifiquement une colonne cela serait peut-être envisageable de construire une grande polaire ? comme ça par exemple : Facile de faire une grande hauteur ! -
Bonjour à tous ! Je n’ai actuellement pas d’imprimante mais j’ai pas mal utilisé une Makerbot et une Ultimaker pendant mon école d’ingé (notamment car nous avons participé à la coupe de france de robotique) donc j’ai de bonnes bases en impression 3D et en conception mécanique Mon projet actuel est de me faire une Delta, selon le concept de Wall Delta de Nicholas Seward dont je suis un peu tombé amoureux ^^ C’est un projet au long cours mais je commence à y réfléchir petit à petit, je ferai un fil quand je commencerai à vraiment avancer dessus !