

Tircown
-
Compteur de contenus
2 460 -
Inscrit(e) le
-
Dernière visite
-
Jours remportés
12
Tout ce qui a été posté par Tircown
-
 La Dagoma D200 n'avait pas de plateau chauffant et on arrivait à imprimer du PLA sans soucis (j'avais un buildtak). Point suivant, s'assurer que la hotend à un capuchon en silicone et que le ventilateur qui sert à refroidir les pièces ne souffle pas inutilement sur la buse. Et pour finir, il y a 10ans on transférait les fichiers vers l'imprimante avec une carte SD et on avait des écran LCD tout simple avec un encodeur rotatif. Depuis on a des écrans tactiles et des interfaces web, parfois en ajoutant un raspberry ; seulement ce dernier consomme quelque Watts.
La Dagoma D200 n'avait pas de plateau chauffant et on arrivait à imprimer du PLA sans soucis (j'avais un buildtak). Point suivant, s'assurer que la hotend à un capuchon en silicone et que le ventilateur qui sert à refroidir les pièces ne souffle pas inutilement sur la buse. Et pour finir, il y a 10ans on transférait les fichiers vers l'imprimante avec une carte SD et on avait des écran LCD tout simple avec un encodeur rotatif. Depuis on a des écrans tactiles et des interfaces web, parfois en ajoutant un raspberry ; seulement ce dernier consomme quelque Watts. -
Cinématique IDEX - CoreXYU, Hybride ou Cartésienne simple ?
Tircown en réponse au topic de Badid dans Le coin des Cubiques
En passant de 10°C à 65°C une barre de 400mm d'alu s'allonge de 0.5mm. Au moins avec un tête à bascule t'as des offsets constants entre les deux buses. -
Cinématique IDEX - CoreXYU, Hybride ou Cartésienne simple ?
Tircown en réponse au topic de Badid dans Le coin des Cubiques
Salut, J'ai d'abord construit une IDEX cartesienne puis j'ai implémenté pour Klipper l'hybrid-corexy, donc totalement pro IDEX, pourtant dans ton cas je partirais sur une tête basculante. Avec une telle taille et une enceinte chauffée tu vas avoir des difficultés pour aligner les deux têtes d'une IDEX et tu devras attendre des heures pour que tout se dilate correctement et prennent sa position définitive avant d'imprimer. A 65°C, les cartes CAN et toute l'électronique non prévue pour cet environnement ne tiendront pas longtemps. Il te faudra des courroies plus large que les habituelles 6mm, peut-être qu'une cinématique cartésienne serait plus adaptée car elle limite la longueur des courroies. Et pourquoi pas des vis à billes d'ailleurs. Avec ces specs, t'es dans une autre catégorie. Comme l'a très justement souligné Savate, les matériaux que tu souhaites imprimer ne nécessitent pas de telles températures. -
Projet conception & fabrication cubique
Tircown en réponse au topic de pscherer dans Le coin des Cubiques
La sonde beacon est très bien et a d'excellent retours. Si tu as le budget, go. En parallèle, prend un bon plateau. Les vrais plateaux pour Voron sont bien. C'est de l'alu coulé et usiné au lieu d'être étiré habituellement. Ce processus de fabrication donne un plateau plus stable quand il chauffe avec moins de stress interne. Ça limitera le besoin de cartographier le plateau même si ils ne sont jamais parfaits. Même avec une excellente sonde, il reste nécessaire de compenser les différences de niveau et ça se fait sur les premières couches ; ça peut entrainer des défauts d'impression. Doubler les moteurs sur chaque axe : j'ai toujours pensé que c'était un cache misère. Autant prendre des moteurs plus costauds dès le départ. En plus ça pose la question de doubler les drivers. Le cas échéant ça implique plus d'électronique, une config plus compliquées et donc plus de risque de défauts. Autre solutions, relier les moteurs électriquement en parallèle ou en série et selon ce choix ça diminuera le couple des moteurs ou fera passer le double d'intensité dans le driver. Là aussi ça augmente les risques en plus de compliquer le câblage inutilement voire d'annuler tout l'intérêt de doubler les moteurs. Que ce passe t'il si un des moteur ou son driver lâche et pas l'autre? EddieTheEngineer est même passé sur des Nema14 sur la Tridex car après beaucoup de tests (vidéo dispo sur yt), ils perdent moins de couple avec la vitesse et suffisent largement pour imprimer. Par contre il oriente vers une référence précise de Nema14 car tous ne fonctionneront pas aussi bien. -
Projet conception & fabrication cubique
Tircown en réponse au topic de pscherer dans Le coin des Cubiques
J'ai travaillé sur l'implémentation de ce genre d'imprimante sur Klipper avec un étasunien. La mienne n'est pas opérationnelle, je n'ai pas beaucoup de temps à y consacrer mais la sienne est disponible sur github DuelingZero https://github.com/zruncho3d/DuelingZero. Il fait de petites imprimantes, c'est son truc, donc l'impression simultanée de 2 pièces n'est pas très pertinente mais c'est mon objectif. (pas encore dispo sur Klipper pour cette kinematic). Il faut quand même être conscient que ce genre d'imprimante est complexe à utiliser. Pour l'instant c'est plus pour le show que pour imprimer couramment. L'avantage d'avoir les Y séparés c'est qu'on peut toujours s'en servir comme une imprimante classique à une tête si on a pas calibré totalement l'IDEX et sans se trimbaler la masse de l'autre tête. Parmis les complexités : il faut rendre tout le double XY coplanaire pour imprimer en duplication/mirroir. Gérer le fait que la prise d'origine n'est pas au même endroit, la dilatation thermique du châssis l'affecte. Et j'en passe. La commu' s’affère à la conception de capteurs d'offset entre les buses, à l'implémentation dans le firmware ce qui pourra grandement simplifier l'usage des idex/toolchangers. Pour l'instant ce type d'imprimante est peu répandue, donc il y a encore beaucoup de chose à créer/améliorer. -
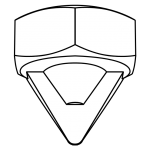
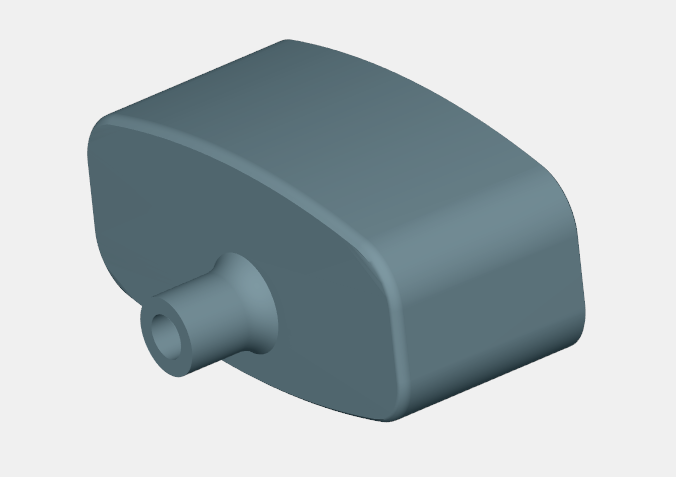
Gagnant! c'est pour réparer un store Velux. Ça s'emboite sur le coté du profilé situé en bas du store. L'excroissance sur le coté reçoit une vis qui sert à attacher le schmilblick au coulisseau qui va dans le rail sur le coté du Velux et guide le store.
-
Deux. Ou un seul en l’occurrence car c'est une réparation.
-
Non
-
Oui mais il va falloir être bien plus précis. Dans la maison. Non.
-
intérieur
-
Pas du tout
-
Allez, bonne chance. Je ne pourrais malheureusement pas prendre en photo la pièce à son emplacement final.
-
Un gabarit pour assembler des batteries li-ion 18650?
-
Rpi <USB> FLY Super8Pro (flashée en can bridge) <CAN> Toolhead 1 et 2 (série ou parallèle). Sur la RRF-36 je ne pense pas. Une EBB36 compatible klipper, ça coute 17€ livré.
-
1/ J'imagine que le LilBus est là pour partir en CAN-bus depuis le Rpi. C'est inutile car la FLY Super8Pro peut servir de USB-to-CAN bridge (à activer lors du flash) 2/ La carte FLY RRF36 n'est pas compatible Klipper à cause du contrôleur CAN utilisé. RepRapFirmware requière le CAN-FD soumis à licence, Klipper utilise le CAN 2.0 pour contourner ce problème. 3/ Tous les raspberry sont compatibles avec Klipper, c'est Octoprint qui est le plus gourmand et élimine les Rpi1 et Zero. Il y a des alternatives avec Fluidd et Mainsail. J'utilise en général des Rpi3B+ mais j'ai aussi une imprimante qui tourne sur un Pi Zero 2W sans difficulté. Dans la quasi totalité des cas le Pi Zero 2W peut être alimenté par la carte de l'imprimante (0.2A), ça évite de devoir prévoir une alim 5V supplémentaire. Il me semble que la Super8Pro est surboostée de ce coté là et doit même pouvoir alimenter un 3B+ (0.8A), voir une 4 (3A). 4/ Le module Wifi de la FLY Super8Pro est inutile avec Klipper, c'est le raspberry qui permettra la connectivité Wifi.
-
Non mais je peux me pencher dessus. Il faudra que quelqu'un se dévoue pour tester... c'est long et pas toujours marrant. Je reste persuadé que les hybrid-corexy ont beaucoup d'avantages sur les CoreXYU(V), voir lien Tridex partagé par @Savate plus haut. Pour le schéma de courroie c'est plus simple qu'il n'y parait : on prend une CoreXY classique mais au lieu d'attacher les 2 courroies à une seule tête, on attache chaque courroie à une tête différente (l'autre courroie passe librement à travers le bloc carriage). On obtient ainsi les 2 X indépendants. Le Y est un simple aller-retour comme sur les cartésiennes. 3 moteurs suffisent pour faire une hybrid-corexy (les moteurs 3 et 4 de la Tridex font la même chose). Il n'y a que 2 courroies qui passent par l'axe X, contre 3 à 4 pour une CoreXYU(V) et la courroie Y est plus courte. La Tridex est compacte alors certaines pièces sont plus complexes que leur fonction requière pour gagner quelques millimètres.
-
Ça c'est une CoreXYU et ce n'est pas supporté dans Klipper mais pas de soucis avec RRF. Si tu reproduits le cheminement de courroie du haut pour la partie du bas (en miroir) et gère le Y comme une cartésienne, tu obtiens une Markforged kinematics ou hybrid-corexy.
-
Mais si, je suis encore là de temps en temps. De ce que je vois sur les captures d'écran ce n'est pas une CoreXYUV mais une Markforged et c'est bien mieux AMHA. Puisque Markforged est une marque, c'est le nom hybrid-corexy qui a été choisi pour Klipper. Donc t'as même le choix du firmware. Pour l'instant Klipper ne gère pas officiellement l'impression en mirroir ou duplication mais j'y travaille et c'est disponible "officieusement". Il me reste qu'à rendre le module un peu plus ouvert à des cinématiques comme la coreXYUV et à gérer l'intégration dans le dépôt principal. Beau projet en tout cas. Je vais suivre tes avancées de près.
-
Mon cube CoreXY avec portique mobile
Tircown en réponse au topic de ZeblodS dans Le coin des Cubiques
Tu devrais regarder du coté de la fonction quad gantry levelling du firmware Klipper. La Voron V2 l'utilise par exemple. En bref avec 1 moteur dans chaque coin branchés indépendamment et une sonde sur la tête, l'imprimante palpe chaque coin du plateau et ajuste la hauteur pour rendre les 4 coins de la gantry coplanaires et parallèles au plateau. On le voit en action rapidement dans cette vidéo: https://youtu.be/nik-HCeOSB8?t=1048 -
Une serrure pour mon coffret EDF
Tircown en réponse au topic de jcjames_13009 dans Projets et impressions 3D
La clé de voiture marche parfaitement pour ouvrir les coffrets. -
Ils sont aux royaumes-unis, malheureusement parce que les produits qu'ils proposent ont l'air excellent.
-
Bonjour, En achat européen il n'y a pas encore de kit complet à ma connaissance. LDO prépare un kit V2.4 pour Q2, c'est de la bonne qualité et ils y a plusieurs distributeur européens. Si tu ne peux pas attendre aussi longtemps, la meilleure solution pour maitriser ses pièces est de sourcer soi-même chaque élément mais tu ne pourras pas éviter totalement les achats en Chine. Il y a une BOM sur le site de Voron avec des vendeurs dont la qualité des pièces est vérifiée. Par ailleurs il y a pas mal de site qui vendent des pièces détachées en Europe, dont les plus volumineuses et couteuses. Les achats en Chine peuvent rester limités à des petites pièces, donc des commandes <150€ et juste la TVA. Quelques sites: https://vonwange.com/ https://fermio.xyz/ https://lecktor.com/en/ https://caribou3d.com/en/ Le plus efficace pour des infos sur les Voron, c'est de rejoindre le discord officiel, il y a un channel francophone. Les membres pourront répondre à tes questions et te donner des astuces pour le sourcing en Europe. Il y a une BOM adaptée disponible également.
-
Il y a eu pas mal de soucis avec la spider et il y a encore quelques soucis du QC. Par contre ils assurent pour le SAV, si le défaut est avéré et prouvé, en général ils en renvoient une neuve sans sourciller. Il y a de bons retours sur l'Octopus. Je ne connais pas la SuperHV mais franchement, j'aurais préféré qu'ils mettent de bon mosfets directement plutôt que de les rendre remplaçables...
-
Les mosfet fans de certaines cartes BTT sont assez fragiles. Il est peut-être grillé je déconseille le move=1 pour X en position de parking parce que d'une part c'est inutile, le déplacement suivant pour quitter le parking appliquera les offsets. D'autre part ça peut être dangereux si tu as un gros offset à appliquer et que tu es en buttée. Dans ce cas, les endstop ne sont pas lus et la protection "move out of range" ne fonctionnera pas.
-
La seule solution actuellement c'est de faire un generic fan et d'overide les commandes gcode. Un extrait de ce que j'utilise (sans section [fan] sinon il y a une erreur): # T0 print cooling fan [fan_generic fanX1] pin: PC9 cycle_time: 0.0100 kick_start_time: 1.00 hardware_pwm: false # T1 print cooling fan [fan_generic fanX2] pin: PA8 cycle_time: 0.0100 kick_start_time: 1.000 hardware_pwm: false [gcode_macro DC_VARS] variable_fan0: 'fanX1' variable_fan1: 'fanX2' gcode: [gcode_macro M106] description: Override "M106" to allow multiple extruders. gcode: {% set dcvars = printer["gcode_macro DC_VARS"] %} {% set raw_speed = params.S|default(0)|float %} {% set fan_speed = (raw_speed / 255.0)|round(2) %} {% if (params.P) is defined %} {% set P_fan = dcvars.fan0 if (params.P)|int == 0 else dcvars.fan1 %} SET_FAN_SPEED FAN={P_fan} SPEED={fan_speed} {% else %} SET_FAN_SPEED FAN={dcvars.fan0} SPEED={fan_speed} SET_FAN_SPEED FAN={dcvars.fan1} SPEED={fan_speed} {% endif %} [gcode_macro M107] description: Override "M107" to allow multiple extruders. gcode: M106 S0 Il y a une coquille dans la doc de SET_GCODE_OFFSET. Il y est sous-entendu que la valeur par défaut de MOVE est 1 (True) mais en réalité ce n'est pas le cas. Donc les offsets ne sont pris en compte qu'au prochain déplacement absolu de l'axe concerné. Si tu veux que ça ajuste directement, mets: SET_GCODE_OFFSET X=100 Y=100 Z=100 MOVE=1 Néanmoins je te déconseille de mettre MOVE=1 en position de parking. Dans ce cas le mieux est de faire un premier SET_GCODE_OFFSET pour le Z avec MOVE=1 puis un SET_GCODE_OFFSET avec les XY sans ce Move. Lorsque la tête retournera sur la pièce à imprimer ce sera appliqué et le Z sera déjà à la bonne hauteur.


