Classement



Contenu populaire
Contenu avec la plus haute réputation dans 29/09/2025 dans Messages
-
Perso je suis pour le partage, mais il faut bien gagner sa vie aussi, n'as tu jamais rien vendu ?une impression, un vieux truc que tu ne voulais plus? je trouve aussi que le prix de cet appareil est un peu élevé, je pense qu'il aurait plutôt dû vendre les fichiers complet à 2 ou 3 euros, il aurait eu la même marge et sans prise de tête. Comme l'a dit Pascal plus haut, je vous trouve un peu excessif, notre forum n'as pas par habitude de défoncer les gens comme ça, j'espère que ce n'est qu'un mauvais passage...4 points
-
Demande lui des exemples concret pour voir ce qu'il va te sortir. Plastique, moustiquaire , il te le bouffe direct déja, tu peux oublier avec leur mandibules. Meme les clapets ils arrivent à les manipuler avec leur pattes, c'est trés, trés intelligent. ça parait super simple comme systême mais il a fallu beaucoup de temps d'observation et de modification pour que ce soit vraiment éfficace à 100%. Quand je sors un produit innovant, je peux te garantir que ça marche ( par exemple le MagnetMK10, simple et éfficace !)2 points
-
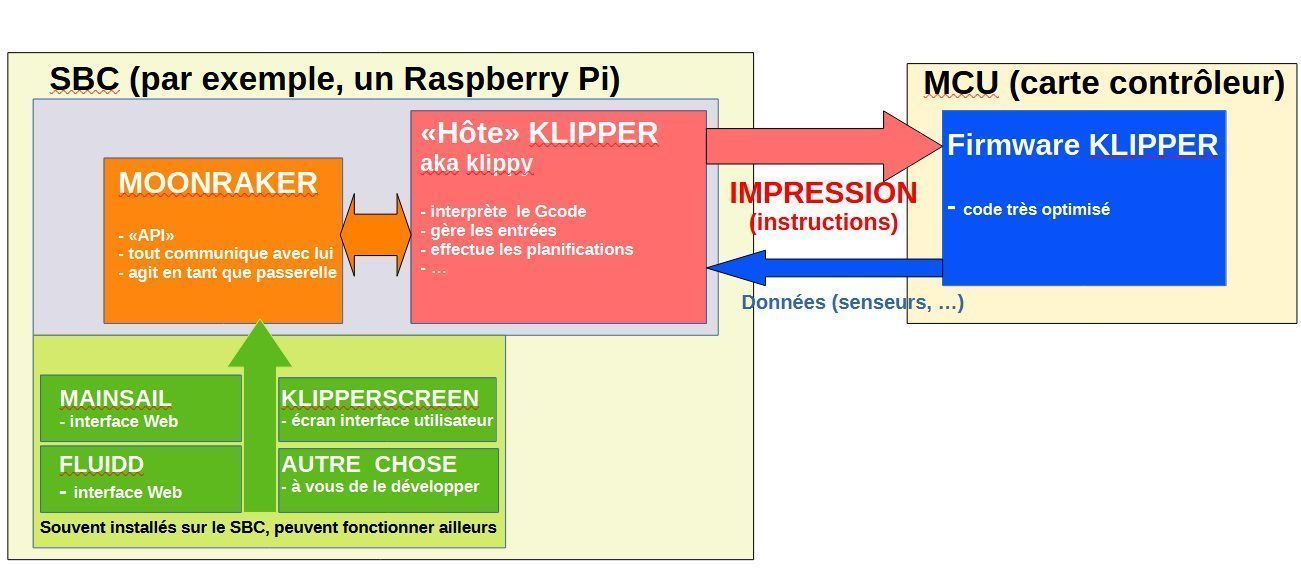
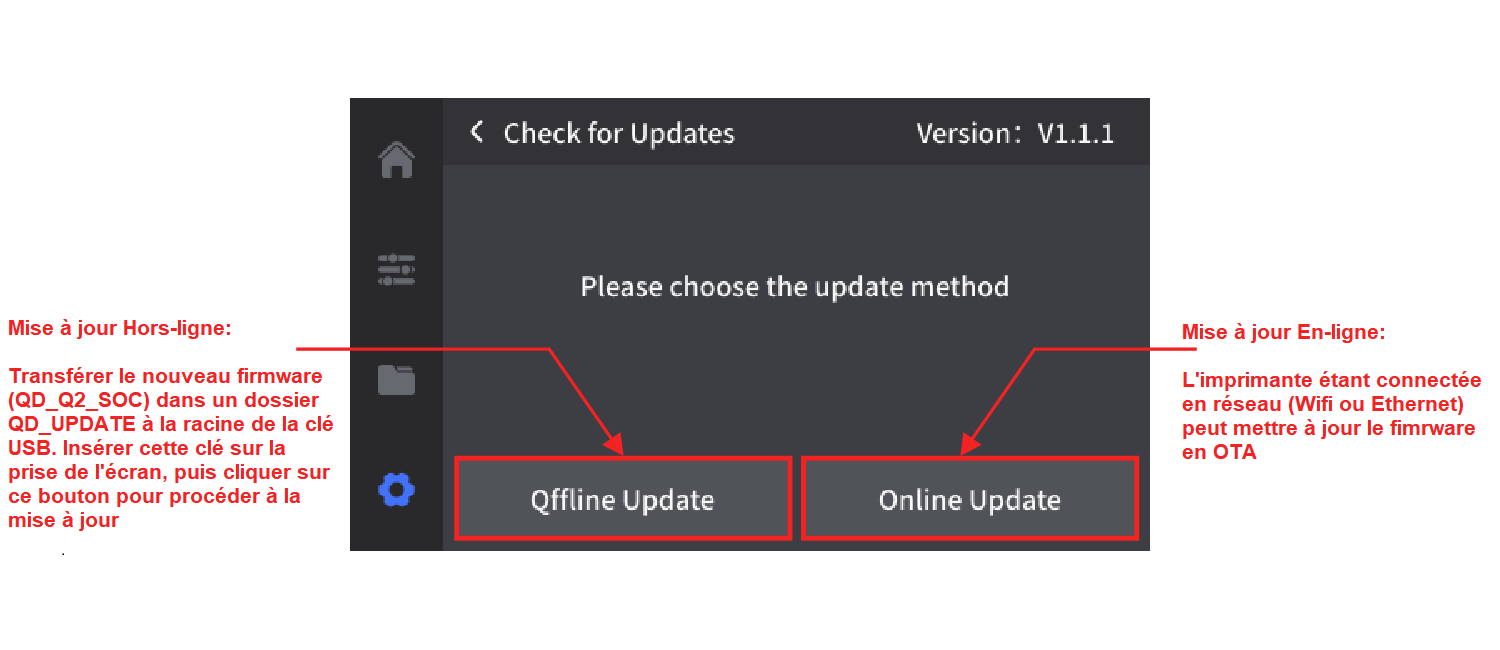
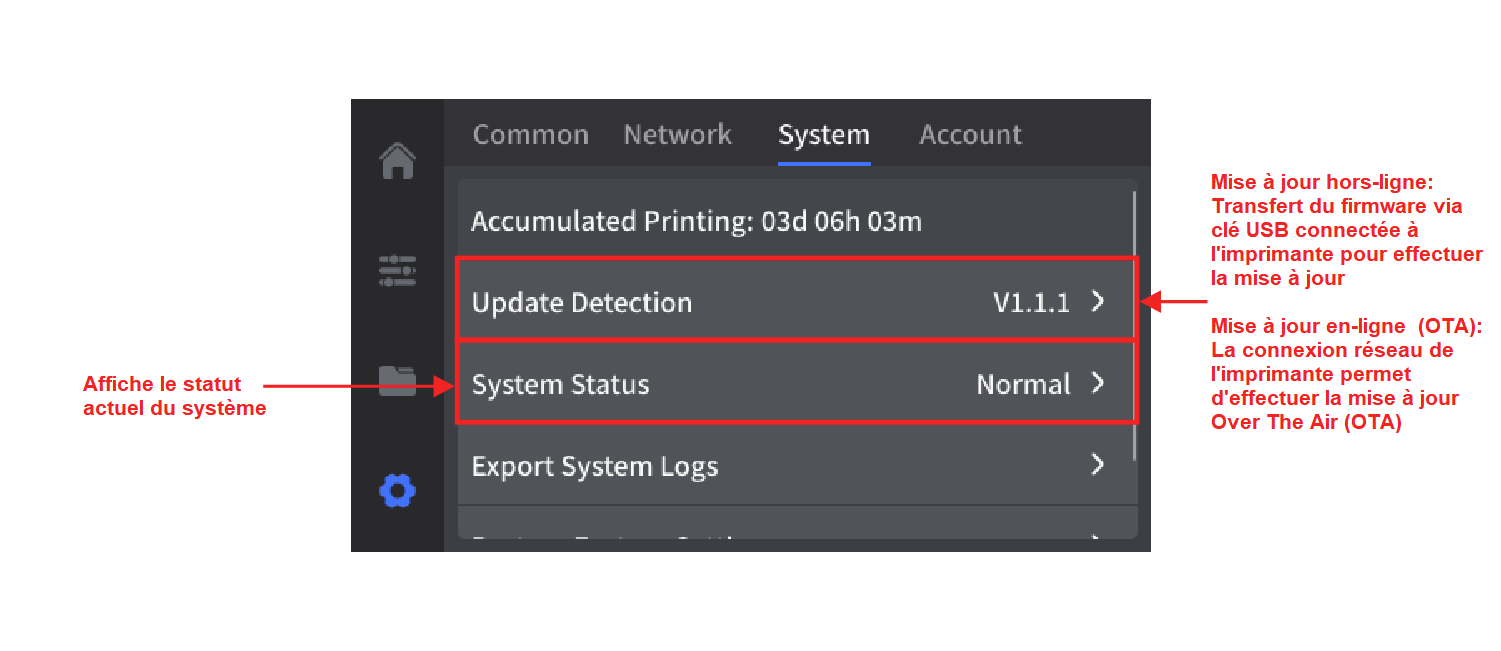
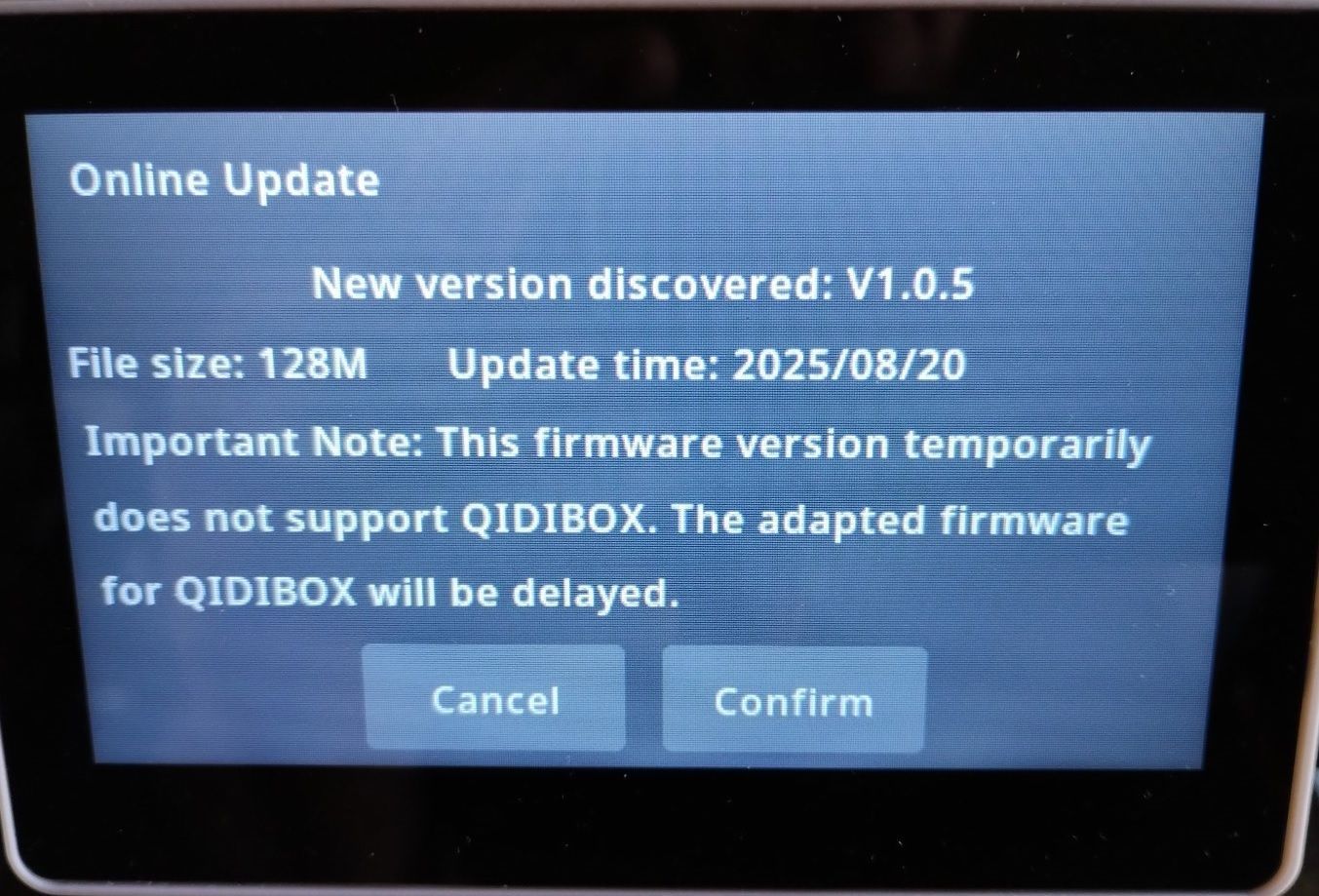
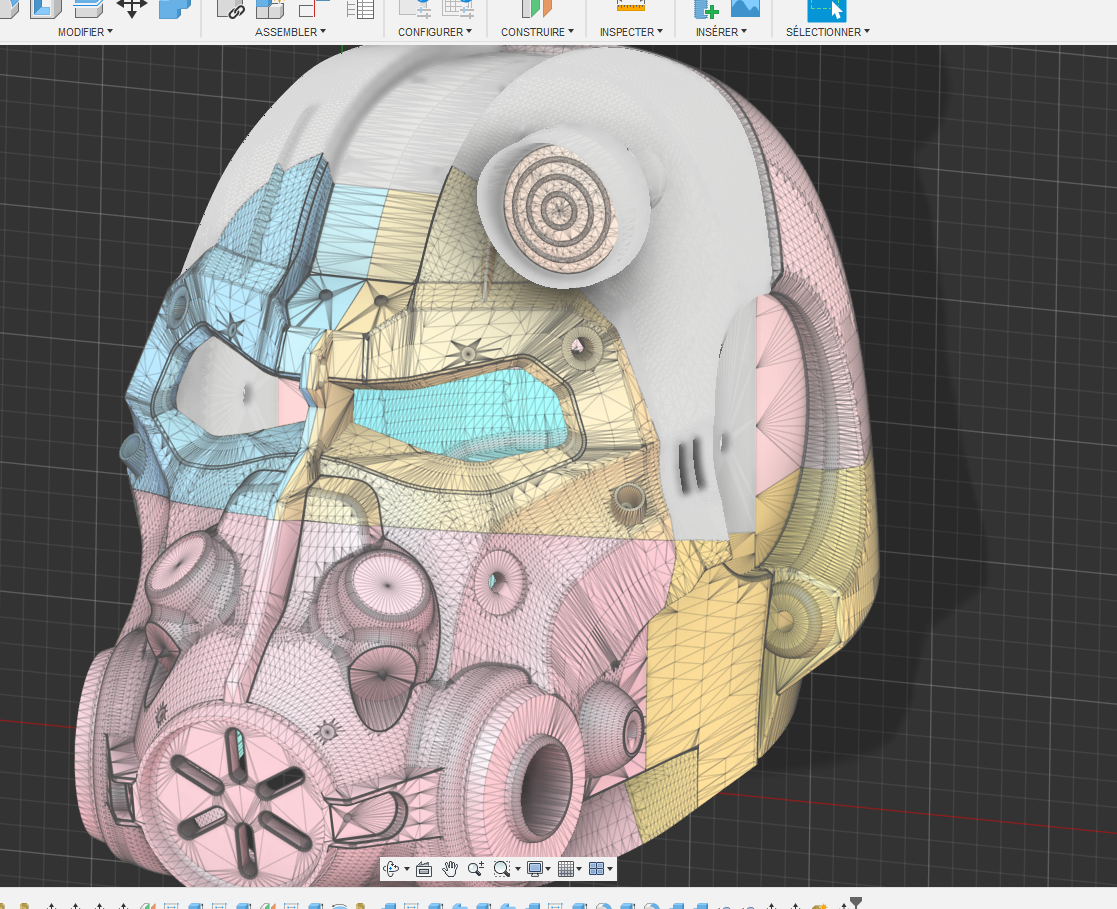
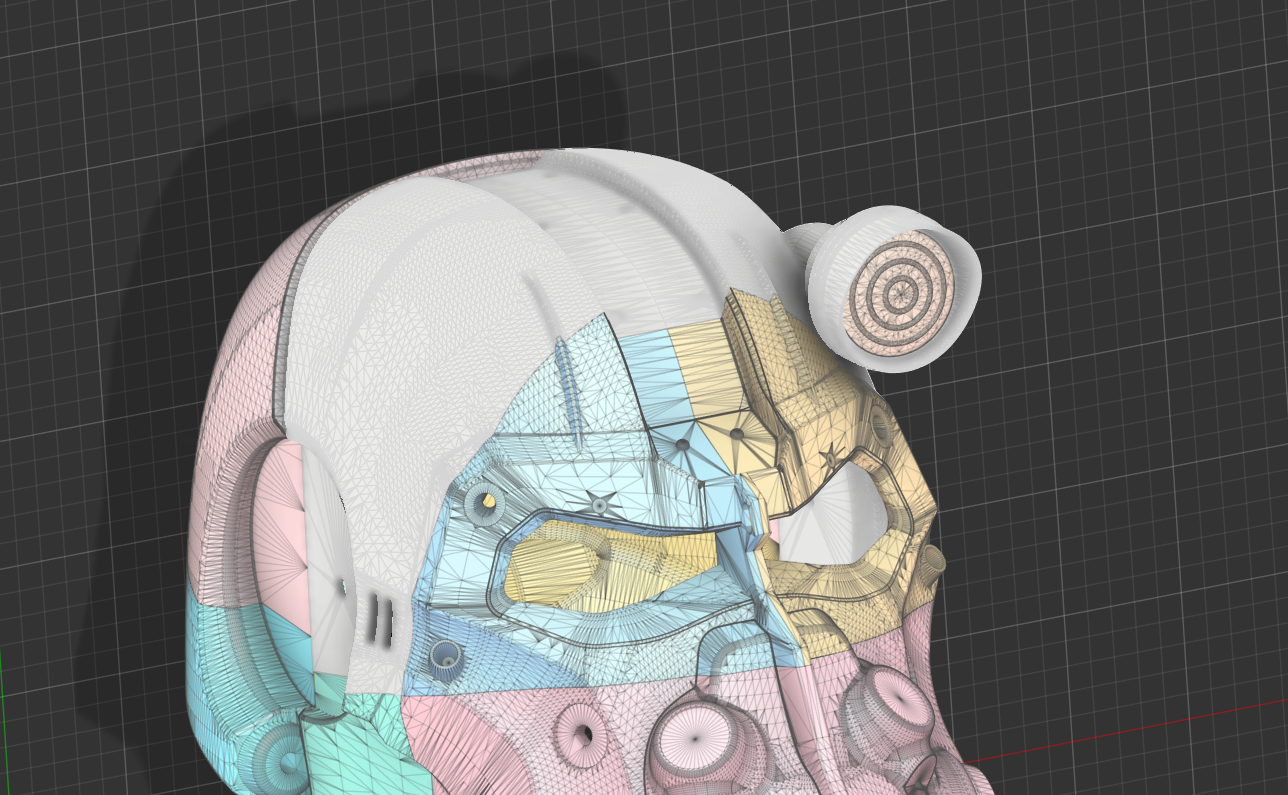
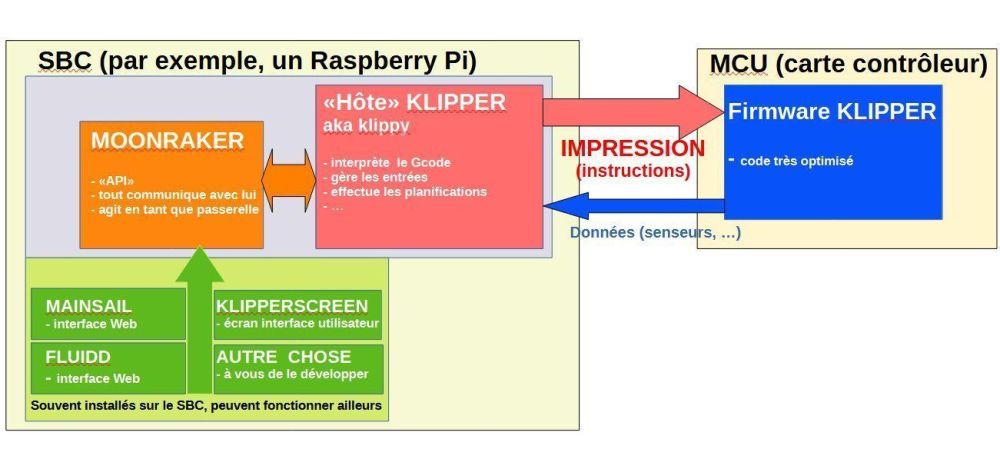
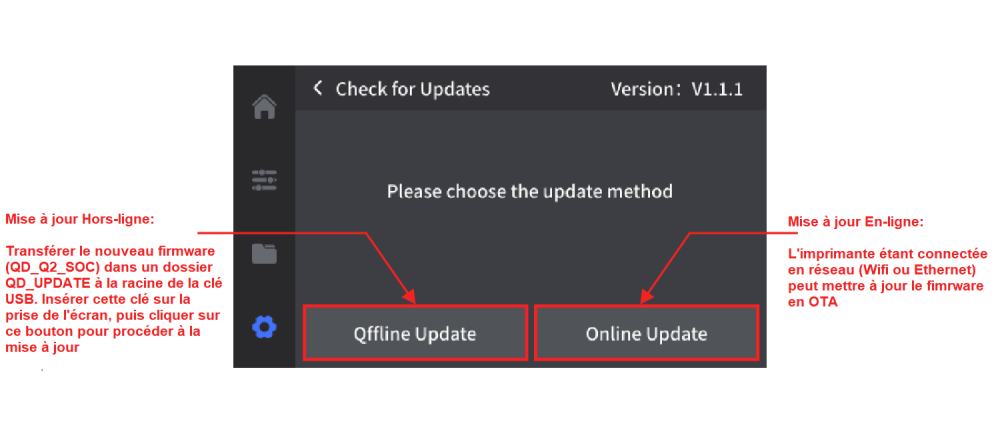
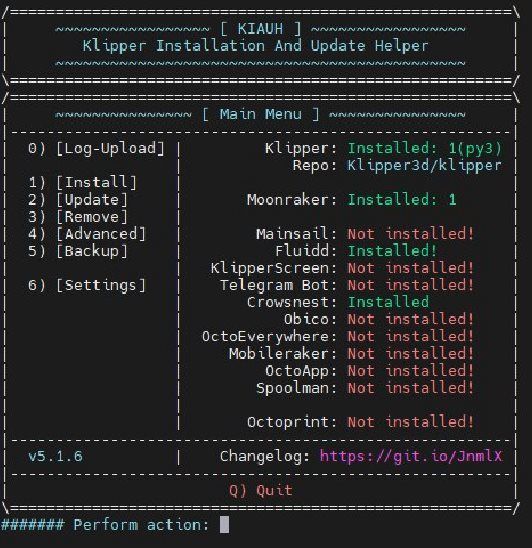
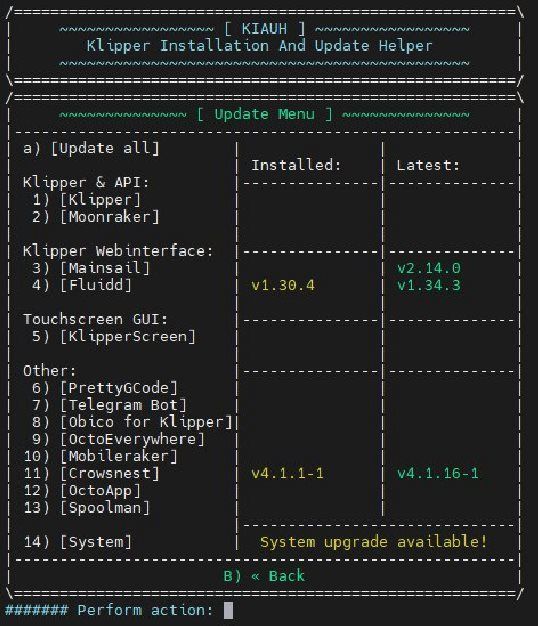
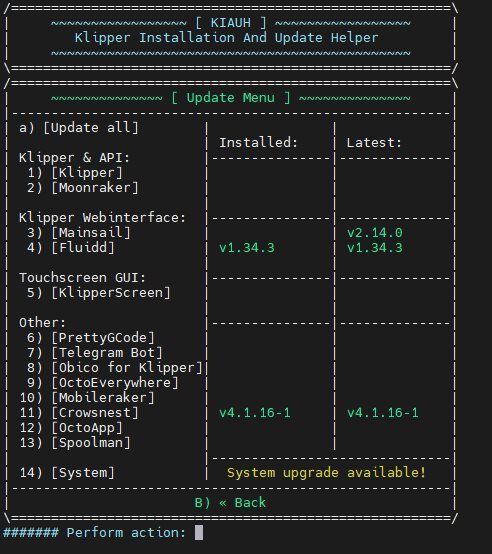
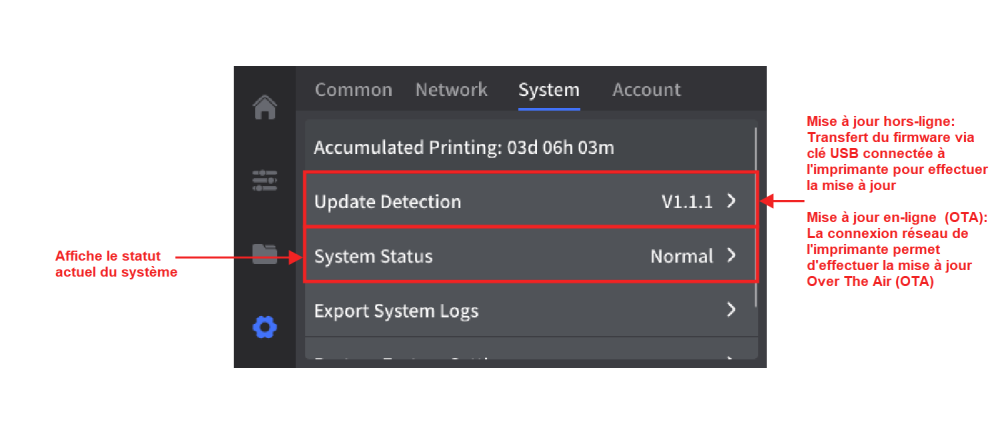
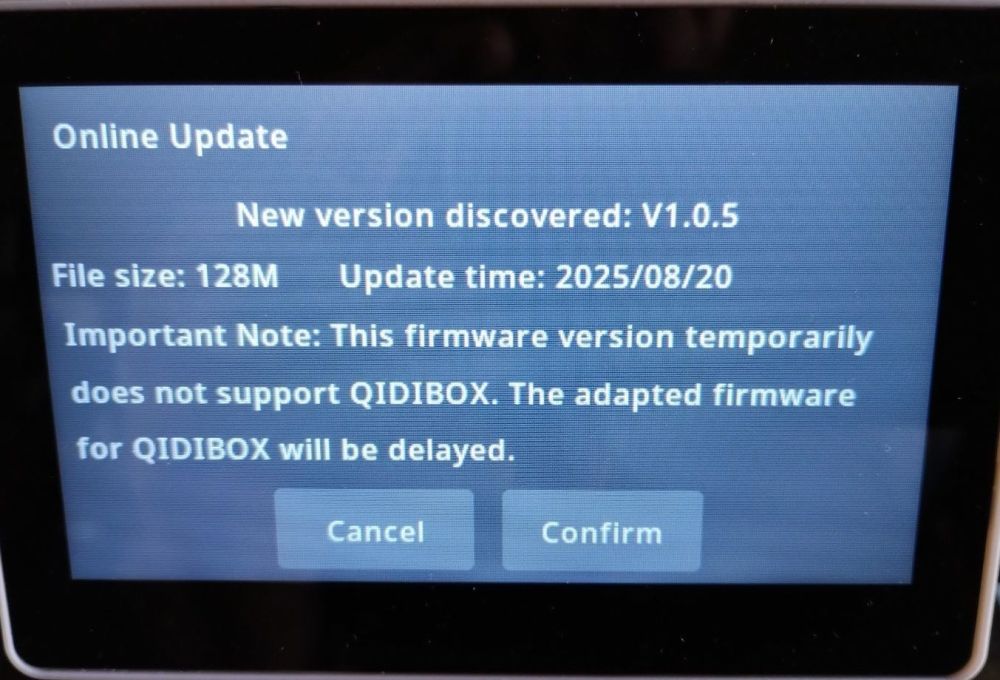
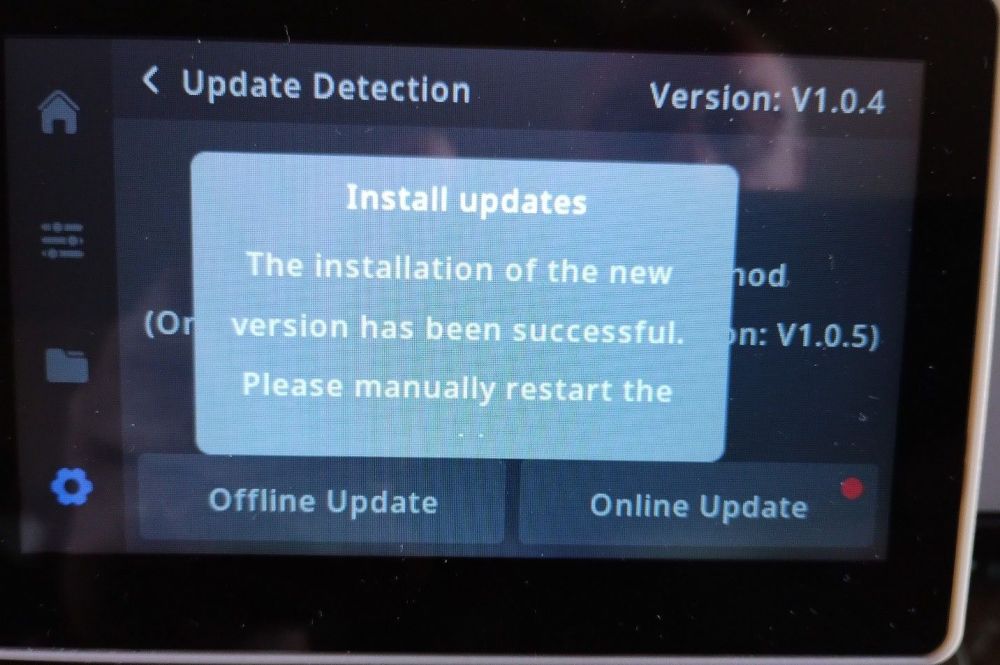
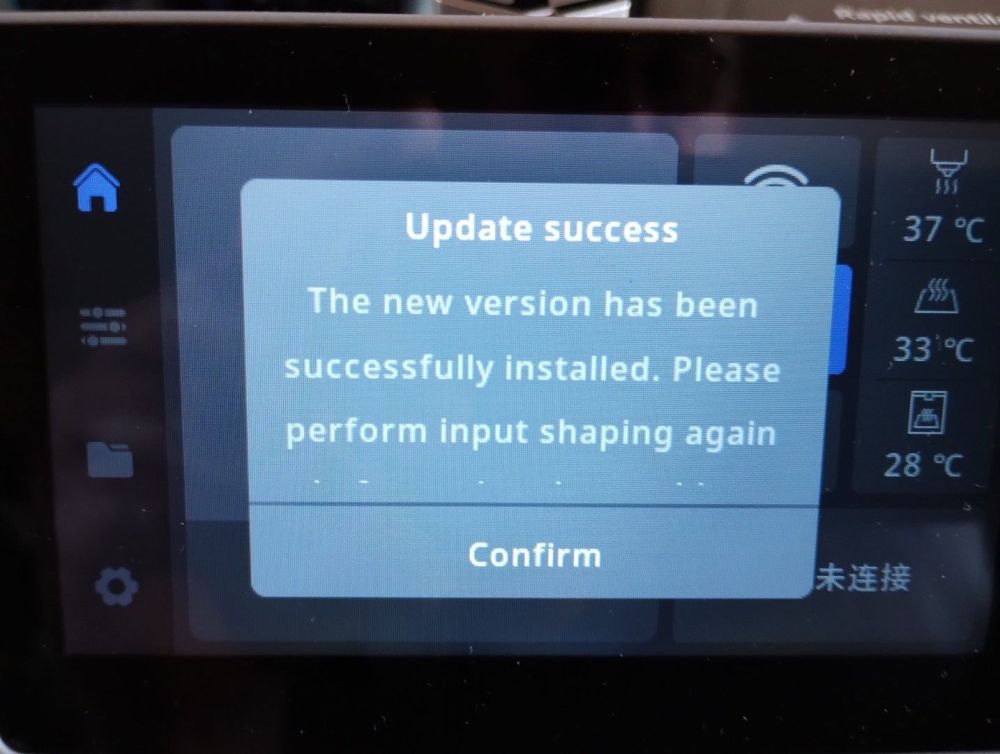
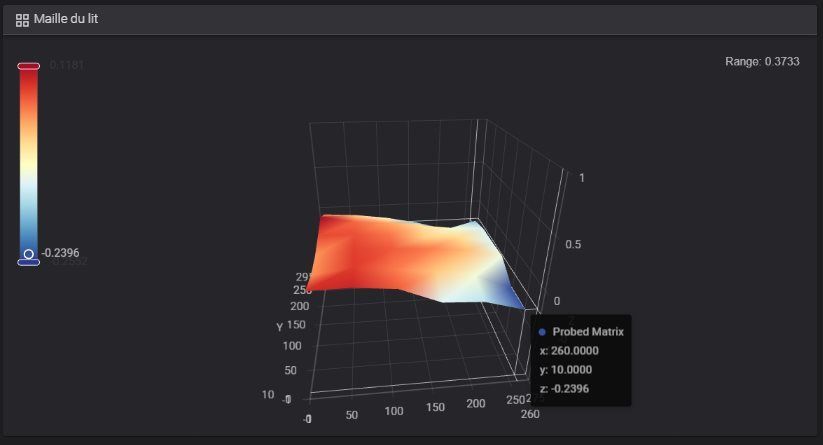
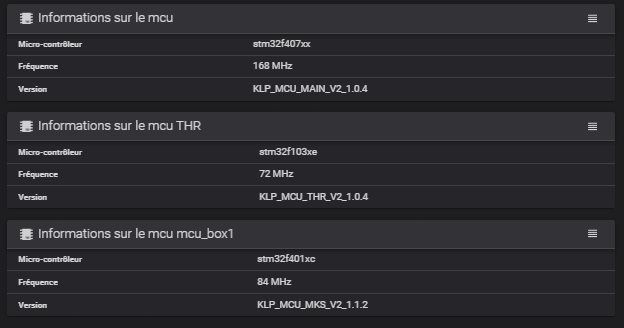
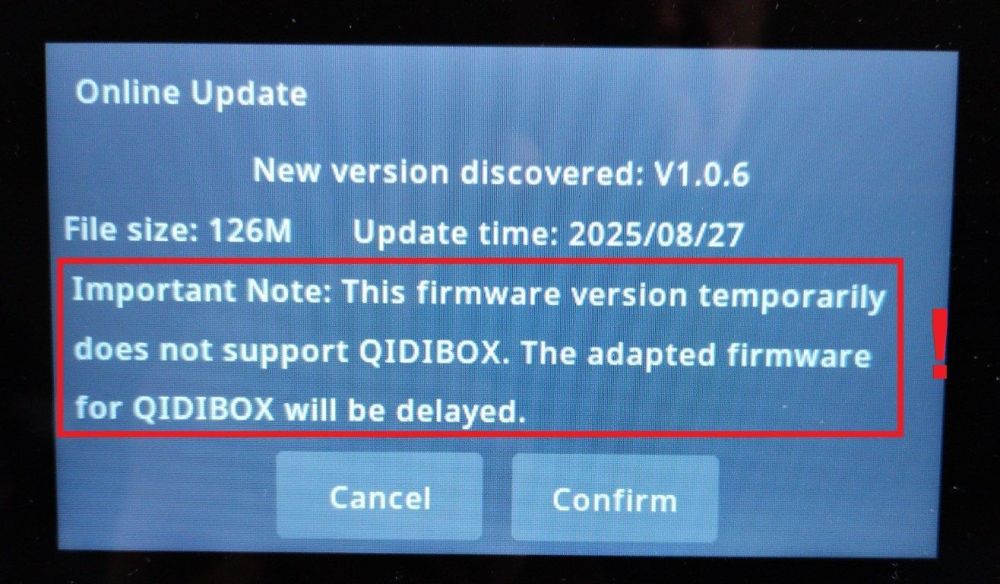
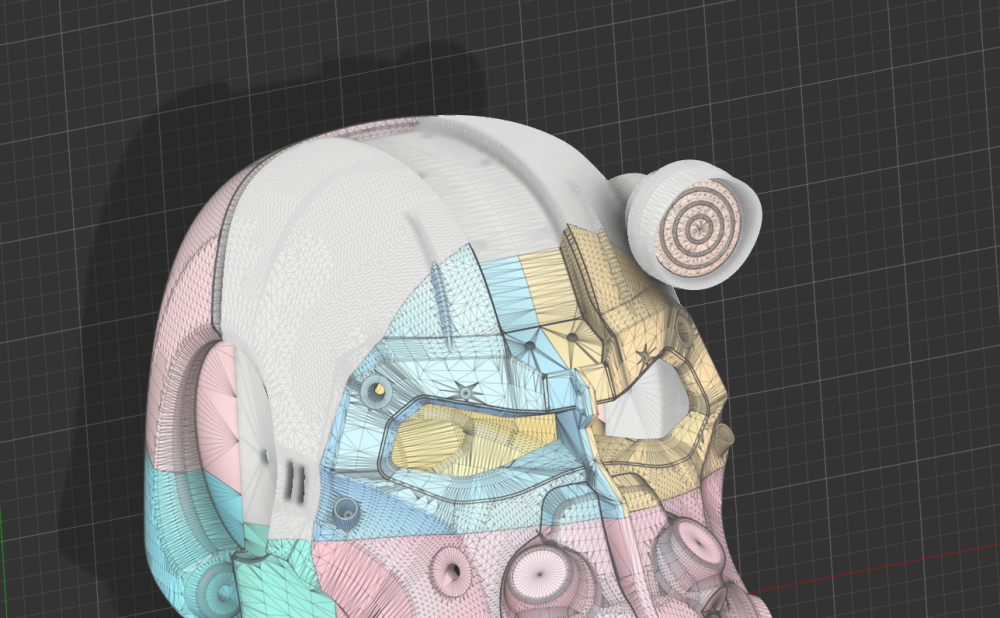
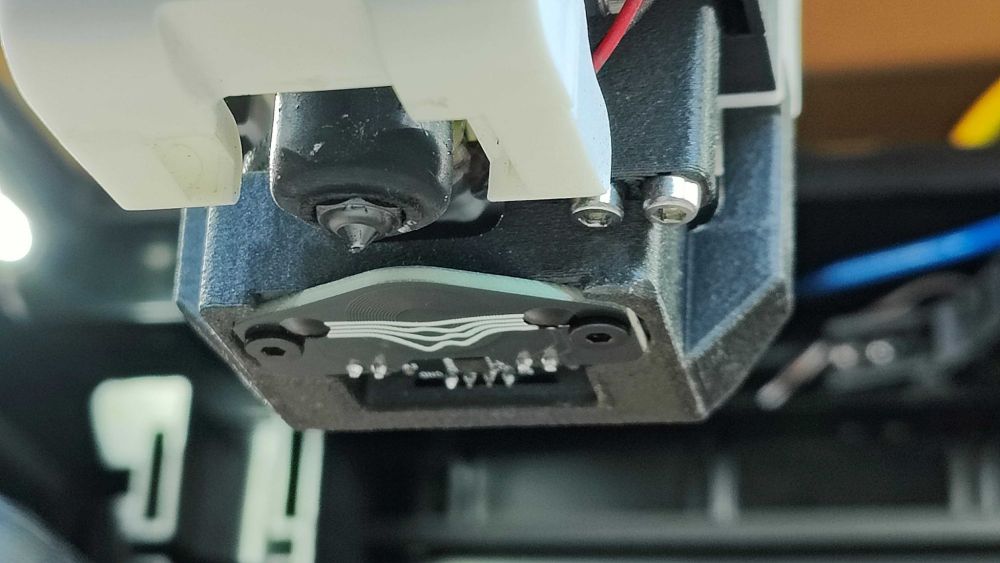
OS, écosystème Klipper Nous aborderons dans ce sujet la partie logicielle, à savoir : le système d'exploitation (Debian), l'écosystème Klipper (Klipper, Moonraker, Fluidd) Debian Les imprimantes précédentes de Qidi utilisaient une seule carte pour faire fonctionner Klipper, carte regroupant l'unité de calcul et l'unité de contrôle. La Q2 utilise deux cartes séparées. L'unité de contrôle (Klipper) se trouve à l'arrière de la Q2. Elle pilote les matériels et utilise un micro-contrôleur STM32 (STM32F407). L'unité de calcul se trouve dans l'enceinte sous un cache plastique, à gauche au-dessus du système de chauffage interne. C'est un ordinateur monocarte (Small Board Computer en anglais (SBC)) utilisant un contrôleur Rockchip RK3308B-S. Celui-ci fonctionne avec un système d'exploitation Debian. La section «Information système» de l'interface Web Fluidd, nous donne la version Debian : une Bullseye (version 11). Dommage que depuis la sortie récente de la version Trixie (v13), cette v11 soit désormais passée au statut «oldoldstable». L'accès en ssh au système est possible en utilisant comme identifiant mks et comme mot de passe makerbase . L'accès ssh directement en root (mot de passe inconnu) n'est pas possible, mais une fois connecté en tant que mks, il est possible via "sudo su" de monter en privilèges (attention tout de même à éviter un "rm -rf /" qui serait fatal ). Un extrait de "dmesg" confirme le processeur utilisé (Rockchip RK3308B-S) : lscpu permet de lister les caractéristiques de ce processeur (ARM Cortex-A35, quatre cœurs, fréquence 1,1 Ghz) qui n'est pas un foudre de guerre avec ses 48 BOGOMIPS : Plus d'infos avec "cat /proc/cpuinfo" Combien de RAM ? 512 Mo (les modèles précédents (Serie3, Q1 Pro, Plus4) avaient 1 Go). L'eMMC (capacité de 32 Go) est soudée (avec les modèles précédents, elle était amovible). La partition contenant l'OS (/dev/mmcblk0p6) est montée à la racine au format ext4. Un seul module du noyau est chargé : le Wifi La version Debian est ancienne (v11. , Bullseye). Une tentative de mise à jour des dépôts se solde par un échec. En plus, les dépôts pointent sur des miroirs Debian chinois (a minima, moins rapides que des serveurs locaux) : C'est normal, car Bullseye étant dorénavant en statut «oldoldstable», les dépôts Backports ne sont plus joignables à l'ancienne adresse. Le contenu du fichier /etc/apt/sources.list doit être modifié pour que la mise à jour des dépôts se fasse, permettant maintenant la mise à jour des paquets du système ou l'installation de logiciel (git par exemple qui a dû être installé, utilisé puis supprimé ). Pour le fichier sources.list, voilà le contenu du mien : Avec ces liens «corrects», la mise à jour des dépôts va jusqu'au bout : Un «sudo apt upgrade -Y» met à jour les paquets système (175 paquets au moment de ce test). Vérification de la zone horaire : Pourquoi mon matériel utilise cette zone (Jerusalem) ? Correction : Date et heures sont à présent correctes . KIAUH KIAUH (Klipper Installation And Update Helper) est installé dans le dossier de l'utilisateur mks. Un premeir test d'utilisation (./kiauh/kiauh.sh) affiche des erreurs (j'ai oublié des faire des copies écrans ). Plutôt que chercher à savoir ce qui dysfonctionne, je sauvegarde le dossier kiauh en kiauh-qidi (mv kiauh kiauh-qidi), puis je clône le dépôt comme l'indique la documentation : cd ~ && git clone https://github.com/dw-0/kiauh.git Après lancement, sa fenêtre principale (main menu) liste les composants de l'écosystème Klipper installés par Qidi : Klipper, Moonraker, Fluidd et Crowsnest sont installés. L'option [2] de ce menu permet normalement de faire des mises à jour, mais Klipper et Moonraker ne peuvent pas l'être et de toute façon, il n'est pas conseillé de le faire . KIAUH ne peut ni détecter les versions installées par Qidi de Klipper et Moonraker (installed) (les dossiers .git ont été supprimés par Qidi), ni détecter les versions actuelles (latest) : Via KIAUH, on peut tout de même mettre à jour Crowsnest et Fluidd : et aussi installer d'autres composants si besoin (Mainsail, Mobileraker, Klipperscreen, …). Mise à jour Qidi On peut vérifier via l'écran de l'imprimante si une mise à jour existe : Depuis la réception de la Q2, j'ai eu plusieurs mises à jour proposées. Certaines effectuées en OTA (Other The Air = via le réseau donc), d'autres en mode manuel à l'aide de la clé USB avec des versions fournies par Qidi. La procédure de mise à jour manuelle utilise la clé USB contenant à la racine un dossier QD_Update. Ce dossier possède les fichiers de mise à jour (QD_Q2_SOC (un fichier installé via apt install… on peut l'ouvrir avec 7Zip pour prendre connaissance de son contenu) et éventuellement des mises à jour des firmwares des cartes (QD_Q2_MCU, QD_Q2_THR, …)). Une fois la mise à jour réalisée en mode hors ligne, le contenu du dossier QD_Update est renommé (QD_Q2_SOC.bak, QD_Q2_MCU.bak, QD_Q2_THR.bak et un journal est ajouté offline_update_log-20250917_120601.txt). Exemple du journal : Les écrans lors d'une MAJ : Une fois l'imprimante redémarrée, un rappel de refaire a minima la compensation de résonances : À noter : les mises à jour En-ligne indiquent que la Qidi Box n'est pas supportée temporairement, le firmware adapté est retardé (problèmes, soucis de hardware / firmware … va savoir Charles, Qidi n'est pas très communicatif à ce sujet). Écosystème Klipper La version installée par Qidi n'est plus un dépôt Git (idem pour Moonraker), le dossier «.git» a été supprimé. Il est impossible de savoir précisément quelle version a servi de base au développement de la Q2. Toutefois, la consultation du fichier ~/klipper/docs/Config_changes.md permet tout de même de deviner que c'est basé sur une version 0.12.x, les dernières modifications datant du 20240415 (la v0.12.0 est sortie en octobre 2023, la v0.13.0 en novembre 2024). Klipper (klippy) utilise majoritairement Python. La version du système Qidi est un Python3 3.9.2 (c'est une bonne chose ). Qidi pour gérer ses propres composants (le capteur de pression entre autres (ADC CS1237)) a compilé les fichiers Python en une bibliothèque (extension .so). Ce qui rend difficile la compréhension de leur fonctionnement. La licence GPL v3.0 de Klipper est loin d'être respectée , même si je peux comprendre que la rigidité du développeur principal de Klipper (Kevin O'connor) puisse refroidir l'ardeur des développeurs quand on souhaite ajouter de nouveaux modules à Klipper. mks@linaro-alip:~$ ls -al klipper/klippy/extras/*.so -rw-r--r-- 1 mks netdev 968080 Aug 21 03:48 klipper/klippy/extras/aht20_f.so -rw-r--r-- 1 mks netdev 1638064 Jul 29 05:20 klipper/klippy/extras/air.cpython-39-aarch64-linux-gnu.so -rw-r--r-- 1 mks netdev 1777896 Aug 21 03:48 klipper/klippy/extras/box_detect.so -rw-r--r-- 1 mks netdev 4203848 Sep 6 09:30 klipper/klippy/extras/box_extras.so -rw-r--r-- 1 mks netdev 558808 Aug 21 03:48 klipper/klippy/extras/box_rfid.so -rw-r--r-- 1 mks netdev 2902080 Sep 5 09:26 klipper/klippy/extras/box_stepper.so -rw-r--r-- 1 mks netdev 596112 Jul 28 13:47 klipper/klippy/extras/buttons_irq.so -rw-r--r-- 1 mks netdev 995328 May 5 07:34 klipper/klippy/extras/cs1237.cpython-39-aarch64-linux-gnu.so -rw-r--r-- 1 mks netdev 1494216 May 5 07:34 klipper/klippy/extras/heater_air_core.cpython-39-aarch64-linux-gnu.so -rw-r--r-- 1 mks netdev 737352 May 5 07:35 klipper/klippy/extras/hx711.cpython-39-aarch64-linux-gnu.so Pour le moment, il est fortement déconseillé de tenter de mettre à jour Klipper (manuellement ou via KIAUH), de nombreux éléments matériels seraient rendus non fonctionnels. De toute façon, une mise à jour vers la version actuelle (0.13.x) nécessiterait de flasher les firmwares des cartes : X-9-3, A-10 (tête d'impression), et celle de la Qidi Box (pour ceux en ayant une). Klipper: printer.cfg Ce fichier est celui qui permet de configurer les éléments matériels pour que le firmware puisse les utiliser via les firmwares flashés sur les deux cartes contrôleurs. Je ne vais pas le détailler précisément, la documentation de Klipper le fait déjà (en français). Je ne reprends que l'essentiel. Les macros sont dans un fichier séparé (gcode_macro.cfg) inclus au début du printer.cfg, de même pour la gestion des timelapses (timelapse.cfg) et celle pour la reprise après coupure de courant (plr.cfg) : # q2 [include KAMP_Settings.cfg] [include gcode_macro.cfg] [include MCU_ID.cfg] [include timelapse.cfg] [include plr.cfg] Analyse de la configuration matérielle MCU La Q2 gère trois «mcu» (micro controler unit) : le principal est celui correspondant au microcontrôleur STM32F407 de la carte X-9-3 via une liaison série USB avec la carte X-9-1 (ajouté via un include MCU_ID.cfg) : [mcu] serial:/dev/serial/by-id/usb-Klipper_QIDI_MAIN_V2_1.0.4_52A832373534350534343539-if00 restart_method: command le second est celui de la carte fille située sur la tête (A-10], microcontrôleur STM32F103 (en fait un GD32F303) là encore en liaison série USB avec la carte X-9-1 [mcu THR] serial: /dev/ttyS4 restart_method: command baud: 500000 le troisième correspond au contrôleur de la carte utilisé par la Qidi Box, microcontrôleur STM32F401, quand elle est installée (ajouté via un include box.cfg). La connexion avec la carte X-9-1 est là aussi en mode série (USB) : [mcu mcu_box1] serial : /dev/serial/by-id/usb-Klipper_QIDI_BOX_V2_1.1.2_5C004B000851333235373730-if00 restart_method : command L'onglet Systeme de Fluidd donne des informations sur les mcus en cours de fonctionnement : [printer] La section de configuration (printer) correspondant à la cinématique de l'imprimante, ses accélérations et vitesses maximales [printer] kinematics:corexy max_velocity: 600 max_accel: 20000 max_z_velocity: 20 max_z_accel: 500 square_corner_velocity: 8 Pilotes moteurs On trouve évidemment les déclarations de paramètres des moteurs pilotant les axes (stepper …). Les axes X et Y utilisent la mise à l'origine sans capteur permise grâce aux pilotes TMC 2240. Exemple pour le pilote de l'axe X : [stepper_x] … endstop_pin:tmc2240_stepper_x:virtual_endstop … [tmc2240 stepper_x] … driver_SGT: 1 … L'utilisation de ce mode nécessite la modification du processus de mise à l'origine via la directive [homing_override] (réduction du courant envoyé aux pilotes le temps de cette mise à l'origine) : [homing_override] axes:xy gcode: M204 S10000 M220 S100 SET_STEPPER_ENABLE STEPPER=extruder enable=0 {% if 'X' in params and 'Y' not in params %} _HOME_X {% endif %} {% if 'Y' in params and 'X' not in params %} _HOME_Y {% endif %} {% if 'X' in params and 'Y' in params %} _HOME_XY {% endif %} {% if 'X' not in params and 'Y' not in params %} SET_KINEMATIC_POSITION X=100 SET_KINEMATIC_POSITION Y=100 SET_KINEMATIC_POSITION Z={printer.toolhead.axis_maximum.z/2} G91 G1 Z5 F600 G4 P2000 _HOME_XY G90 G1 X{printer['gcode_macro PRINTER_PARAM'].max_x_position/2} Y{printer['gcode_macro PRINTER_PARAM'].max_y_position/2} F7800 G91 M400 G28 Z G1 Z20 F600 {% endif %} M204 S10000 G90 La Q2 utilise deux moteurs indépendants pour l'axe Z associés aux pilotes TMC2209, ce qui permet de régler l'inclinaison du lit automatiquement via un Gcode étendu Z_TILT_ADJUST à l'aide des paramètres de la section [z_tilt] : [stepper_z] … endstop_pin:probe:z_virtual_endstop endstop_pin_reverse:tmc2209_stepper_z:virtual_endstop position_endstop_reverse:260 position_max:265 position_min: -2 … homing_positive_dir:false homing_positive_dir_reverse:true [stepper_z1] … endstop_pin_reverse:tmc2209_stepper_z1:virtual_endstop [z_tilt] z_positions: -15,137 285,137 points: 10,137 260,137 speed: 150 horizontal_move_z: 5 retries: 2 retry_tolerance: 0.05 Jauge de pression (load cell) La Q2 utilise une jauge de pression intégrée à la tête en tant qu'interrupteur de fin de course. Ce qui permet : de réaliser la détection du point 0 (surface du PEI), d'effectuer le maillage du lit (les lits sont rarement totalement plats), de corriger automatiquement l'inclinaison du plateau (z_tilt) grâce aux deux moteurs Z indépendants Qidi a développé sa propre sonde (en Python, mais ensuite compilé sous forme d'une bibliothèque) autour d'un ADC CS1237. Une nouvelle section [probe_air] est utilisée par le fichier printer.cfg : [probe_air] sensor_type: c_sensor sclk_pin: THR:PB3 dout_pin:THR: PB4 voltage: 4.95 delta_v: 0.08 z_offset:-0.07 speed: 5 lift_speed:5 samples: 2 sample_retract_dist:3 samples_result: average samples_tolerance: 0.02 samples_tolerance_retries: 10 Le maillage du lit utilise une matrice de 6x6 : [bed_mesh] speed: 100 #100 horizontal_move_z:5 mesh_min:10,10 mesh_max:260,260 probe_count:6,6 algorithm:lagrange#bicubic #bicubic_tension:0.2 mesh_pps: 2, 2 #fade_target:0 Le maillage par défaut sans ajustement (le côté droit est légèrement plus bas et c'est surtout le point avant droit qui contribue à une portée de 0,3733 mm (différence entre point le plus haut et celui le plus bas)) : Compensation de résonances Pour la compensation de résonances, l'accéléromètre utilisé par Qidi est une puce LIS2DW soudée sur la carte fille A-10 qui permet de réaliser automatiquement les mesures : [lis2dw] cs_pin:THR:PA10 spi_software_sclk_pin:THR:PA5 spi_software_mosi_pin:THR:PA7 spi_software_miso_pin:THR:PA6 axes_map: y, z, -x [resonance_tester] accel_per_hz: 150 max_smoothing:0.25 accel_chip:lis2dw probe_points: 135, 135, 10 L'extension «G-code Shell Command» (un script Python de KIAUH) étant installé d'origine, on peut créer des scripts shell et les macros idoines pour produire des graphiques. Le tout regroupé dans un fichier «graphiques-shaper.cfg» (ajouter au début du printer.cfg une ligne [include graphiques-shaper.cfg] : # Process csv files issued from "input_shaping" to obtain png files # [gcode_macro PROCESS_SHAPER_DATA] description: process csv file to png gcode: TEST_RESONANCES AXIS=X FREQ_START=20 FREQ_END=100 OUTPUT=raw_data POINT=135,135,10 TEST_RESONANCES AXIS=Y FREQ_START=20 FREQ_END=100 OUTPUT=raw_data POINT=135,135,10 RUN_SHELL_COMMAND CMD=axe_x RUN_SHELL_COMMAND CMD=axe_y [gcode_shell_command axe_x] command: sh /home/mks/printer_data/config/scripts/axe_x.sh timeout: 300. verbose: True [gcode_shell_command axe_y] command: sh /home/mks/printer_data/config/scripts/axe_y.sh timeout: 300. verbose: True Créer un répertoire «scripts» dans ~/printer_data/config pour stocker les scripts shell : mkdir -p /home/mks/printer_data/config/scripts Ajouter les deux scripts dans ce répertoire nouvellement créé. Exemple du script pour l'axe X (remplacer x par y pour obtenir le script de l'axe Y) : #!/bin/sh # # Create PNG from csv file issued after INPUT_SHAPING, X axis # # Paths # DATE=$(date +"%Y%m%d") SCRIPTS="/home/mks/klipper/scripts/calibrate_shaper.py" CSV_FILE="/tmp/raw_data_x_*.csv" KLIPPER_CONFIG="/home/mks/printer_data/config" PNG_FILE="shaper_x_$DATE.png" # Create if not exist shapers folder in printer_data/config mkdir -p $KLIPPER_CONFIG/shapers $SCRIPTS $CSV_FILE -o $KLIPPER_CONFIG/shapers/$PNG_FILE Pour se faciliter la vie, on peut également installer Klippain Shake and Tune pour obtenir plus de graphiques (objet d'un post ultérieur ). NOTE: Ayant installé Klippain Shake & Tune avant de réutiliser mes «vieux» scripts de génération des images, il est possible que le script Python calibrate_shaper.py provoque une erreur due à l'absence de fichiers Python nécessaires (numpy et matplotlib) à la génération des images. Si c'était le cas alors il suffit d'installer ces bibliothéques et de patienter (longtemps) que tout se construise. En ssh (mks / makerbase), la ligne de commande suivante procédera à l'installation : pip install numpy matplotlib Voilà pour les points qui me semblaient importants du fichier printer.cfg. La configuration matérielle permet de piloter les différents composants éléctroniques via le firmware installé sur les cartes. Ensuite pour piloter les déplacements, les ventilations, les chauffage, c'est par l'intermédiaire de macros que cela se fait. Je ne détaillerai pas ici le contenu de toutes les macros. Je vous mets ici le fichier gcode_macros.cfg de Qidi pour la Q2 (supprimer la double extension .txt) : gcode_macro.cfg.txt Voilà pour cette fois, la suite est à venir.

 2 points
2 points -
Bonjour à tous. Je n'ai peut être pas assez fouillé le forum, mais je n'ai pas trouvé de sujet sur la "The 100", ou sur sa grande sœur, la "The 250". Elle est assez bien documentée sur internet. J'ai construis une The100 pour voir, en recyclant une très vieille prusa like, que j'avais déjà fabriqué il y a 10 ans, avec juste quelques petites modification pour passer le lit de 200x200mm, l'utilisation de vis à agglo (que je préfère au inserts à chaud, et qui reviennent en plus moins cher), l'intégration de raidisseurs métalliques, et 3 moteurs Z au lieu de 2 (le point faible de la version standard à mon avis). J'ai tout réutilisé : moteurs, Lit, électronique (mega2560 et ramps), les tiges de 8mm, les douilles linéaires, les fins de course, les courroies, l'alim de PC. J'ai juste racheté quelques poulies (forcément, y'en a plus sur une core XY), de la courroie, quelques ventilos, et mis en service une hothend AIO et un extrudeur bondtech (une copie) que j'avais en stock. Investissement minimum ! Juste un petit luxe : un BLtouch (une copie). C'est un peu long à imprimer, c'est un peu long à monter et à configurer, c'est pas pour les débutants qui vont se dégouter, mais au final ça marche vraiment bien. Vive klipper ! Evidemment, ce n'est pas une Bambu, ni en qualité ni en vitesse, mais en partant d'une "épave", ça coute 10 fois moins. En qualité, je dirais qu'on est un peu mieux qu'une K3PS pro, au moins du niveau d'une Sapphire SP5, pas loin de ma SV08. Partant de pièces de récup ayant des heures de vol, je ne m'attendais pas à aussi bien. En vitesse, je suis à 150mm/s et je monte petit à petit. C'est visiblement capable de bien plus. Je ne cherche pas la vitesse, mais plutôt la précision dimensionnelle. La prusa like "donneuse d'organes" est écrasée dans tous les domaines. Si quelqu'un hésite à se lancer dans l'aventure, je ne peux que lui conseiller d'y aller. En plus, si vous avez accès à une grande imprimante (type SV08), le cadre doit pouvoir se faire en 3 ou 4 morceaux seulement : montage plus rapide, moins de vis, plus de rigidité.
 1 point
1 point -
J'avais imprimée un réacteur à fusion Fallout pour le fun mais je voulais lui trouver une utilité donc j'ai modélisée un support et le tout me sert de porte casque audio. Le support







 1 point
1 point -
J’ai aussi craqué. Et, coup bol, j’ai profité du désistement de 2 personne pour choper le batch de novembre au lieu de décembre.... J’ai pris le top cover et le pack de 8 filaments vu le prix dérisoire. Je pensais prendre eles buses mais je verrai plus tard en fonction du besoin. Je vais sûrement prendre, en dehors du kickstarter un snap dryer car le système est vraiment super pratique avec les boîtes étanches. Tous les testeurs en disent du grand bien. Et les boîtes restent assez compactes par rapport aux énormes boîtes qui sortent en ce moment.1 point
-
Par contre en discutant dans ce post j'avais cru comprendre - je ne sais plus par qui et à quelle page, mais peut impirte - qu'une buse en acier suffisait... Si si, c'est fait, il est neuf, percé mais neuf. Ah ah, trop drôle : je croyais avoir balancé l'ancien car je n'arrivais pas à en sortir le boit de tube qui restait.... avant de percer le neuf, je m'étais dit regarde le vieux voir comme il était foutu. J'ai renversé la poubelle de mon garage... rien amors j'ai percé le neuf en hésitant comme tu sais. Et c't'ap en rangeant j'ai retrouvé le vieux sur une étagère : je tte le donne en 1000 = il est percé de part en part. Mais pour répondre à ta question, non pas encore essayé, j'ai une grosse impression à faire je verrai à ce moment là. Là il n'a servit qu'à la tour entre 180 et 230 sur 1 h 00. Rien à dire.1 point
-
J'ai retrouvé, merci Google https://github.com/DnG-Crafts/K2-Mainsail Par contre, je crois me souvenir que j'ai du relancer le script suite à une des mises à jour qui avait tout supprimé et ca ne fonctionnait pas car les fichiers n'avaient pas été copiés. c'est cette partie du script qui était mal passée : cp ~/K2-Mainsail-main/camera.html /usr/share/frontend/camera.html cp ~/K2-Mainsail-main/snapshot.html /usr/share/frontend/snapshot.html cp ~/K2-Mainsail-main/index.html /usr/share/frontend/index.html cp ~/K2-Mainsail-main/favicon.ico /usr/share/frontend/favicon.ico cp ~/K2-Mainsail-main/mylogo.png /usr/share/frontend/mylogo.png cp ~/K2-Mainsail-main/camera.html /usr/share/mainsail/camera.html cp ~/K2-Mainsail-main/snapshot.html /usr/share/mainsail/snapshot.html au pire , c'est quelques fichiers à copier à la main si jamais ca ne fonctionne pas . Pour info , firmware 1.1.050 sorti ce jour : 1.1.0.50 Firmware Update Notes: 1. Added some error codes and optimized the handling process. 2. Improved WiFi connection stability. 3. Optimized the resume printing process after power outage. 4. Enhanced some UI display elements. 5. Update step-servo motor system firmware and parameters. 6. Fixed known issues to improve user experience and product stability.1 point
-
Bonsoir, non , je ne suis pas du tout passé par Kiauh est prévu à la base pour les installations classiques. Je n'ai pas l'adresse du depot/script utilisé sous la main , je pourrais poster ca demain si il est encore temps .1 point
-
Vendre, vendre vendre, où est le partage surtout si c'est d'utilité public. Sacré mentalité de nos jours, il n'y a que le fric qui compte. Ne pas me dire il y a du temps passé, des études etc etc... J'ai mis des conceptions sur Printables qui on demandées des semaines de préparation et pourtant c'est mis à disposition gratuitement. https://www.printables.com/@Skizhoo/models1 point
-
Ha, mais on peut quand même presser pas mal de papier avec, donc c'est pas 100% négatif. --> je sors.1 point
-
Pour les plus férus, un survol de l'écosystème Klipper et de l'OS : >>> là <<<1 point
-
Perso, je commencerai par changer le pneufit en haut du radiateur : il a trop souffert pour être encore totalement efficace… Sinon le MagnetMK10 est aussi une bonne solution à condition de bien couper le PTFE interne du hotend. Bien regarder la vidéo sur le site de @Fourmi pour choisir le bon modèle et le monter correctement.1 point
-
Oui . L'OS utilisé par Creality est plus du genre dérivé d'OpenWRT qui ne connait pas ces commandes (pas de systemd non plus). Si tu ne connais pas, visite le site de @Guilouz qui t'apportera peut-être des réponses : Wiki, dépôt du Helper script. Bien lire le «préambule» :
 1 point
1 point -
Tu es medium ?1 point
-
Effectivement c'est aussi pour cette raison que le riser est indispensable, d'origine le PTFE touche/frotte sur la vitre et empêche de faire une boucle plus large et faciliter le coulissement du filament1 point
-
@jojo-monk attention les Riser n'ont dans 75% des cas pas uniquement pour but d'ouvrir le capot du dessus mais aussi de permettre d'avoir l'espace nécessaire pour avoir un positionnement plus fluide et naturelle du PTFE (reverse bowden) qui va jusque la tête. Je connais pas super bien la Elegoo @pascal_lb sera capable de nous dire si cette intérêt est utilise ici aussi. Mais si je prend le cas de la K2 Plus cela est un plus bien que pas obligatoire, mais si l'on prend la M1 Pro de Artillery indéniablement le riser est un système obligatoire pour permettre d'avoir un passage fluide du filament et eviter les soucis. Les constructeurs on souvent un tendance a essaye de faire des machines exploitant un maximum la hauteur possible mais souvent cela induit des soucis de passage du PTFE pas optimum pour 2 sous.1 point
-
Buse Nitro 0.4 et un MagnetMK10 et ton problème serait réglé depuis longtemps. 99% des problèmes de bouchages sont liés au pneufit qui ne retient plus le tube PTFE, un écart se créé entre la buse et le tube et tout se bloque. Pour la buse, si c'est du CF faut minimum du 0.4 mm. Pour la retract, faut faire des test, par exemple sur mon Ender 3 ( en bowden) je suis a 1.9 mm.1 point
-
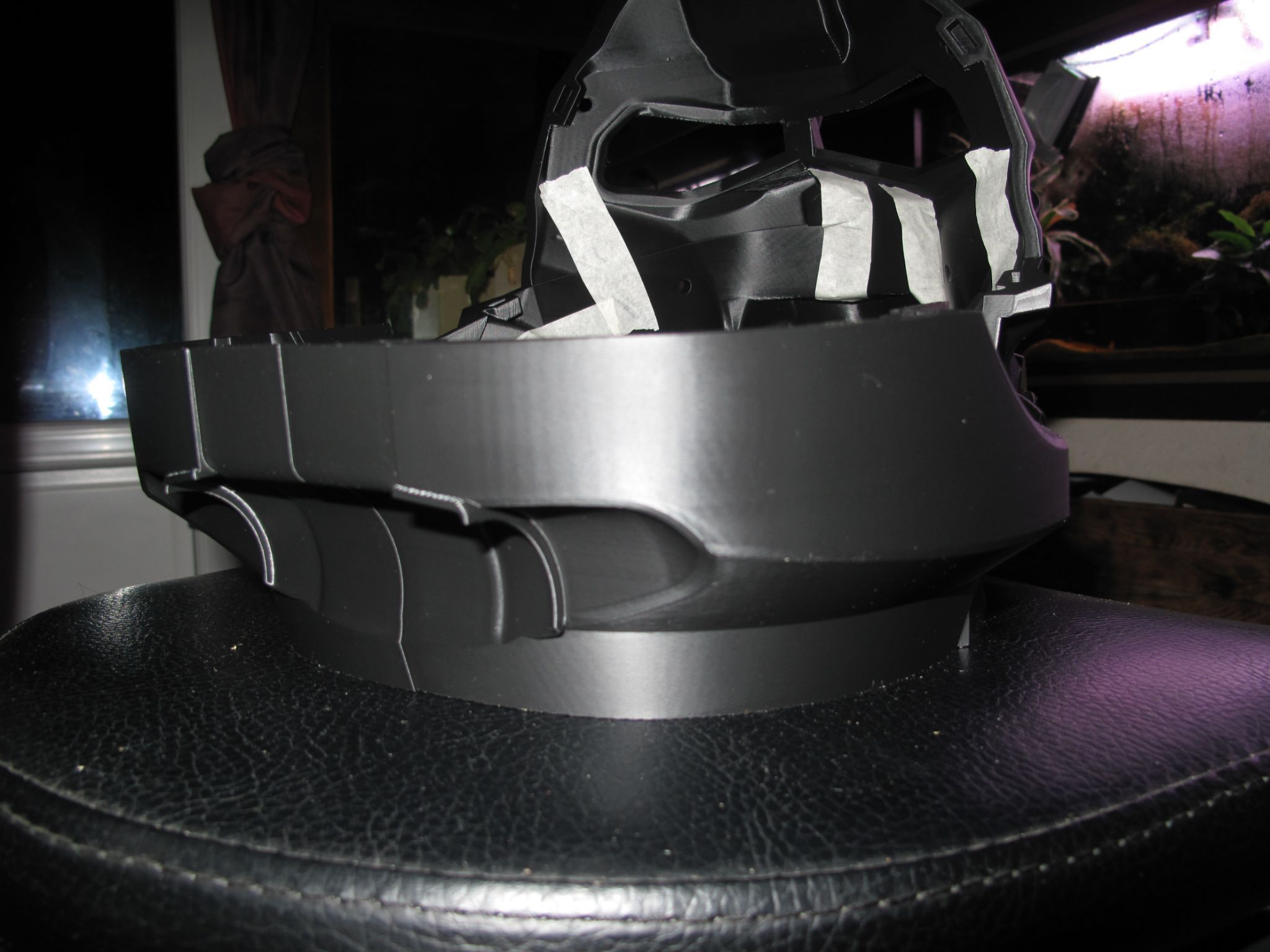
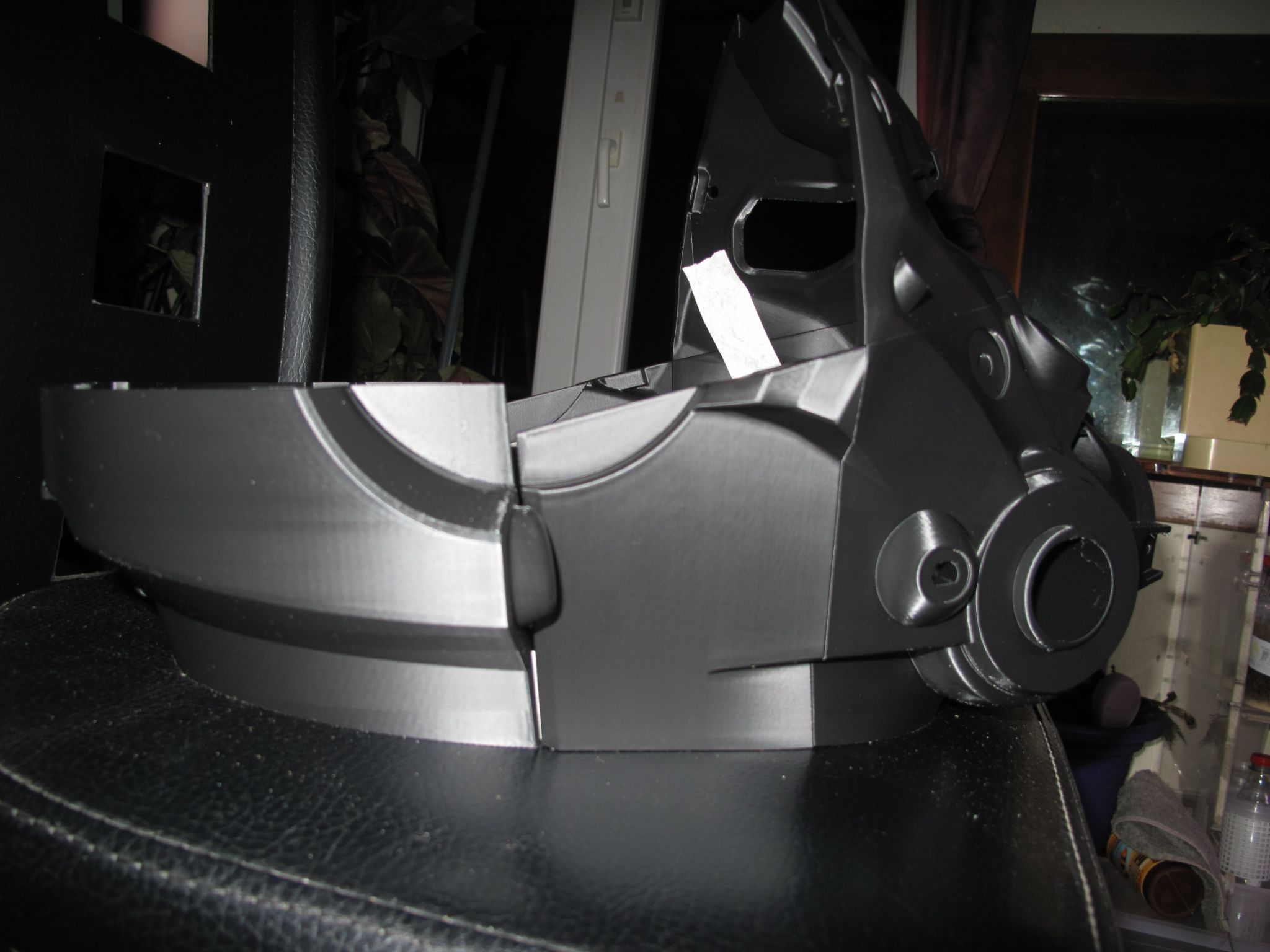
Modélisation de la lampe faite et les impressions avancent bien




 1 point
1 point -
La critique est facile mais je pense que toutes les innovations dans ce secteur sont bonnes à prendre, pour une fois que quelqu'un essaye de se démarquer par un projet pour éradiquer ce fléau à moindre coup je trouve que vous êtes un peu excessif dans vos propos1 point
-
Simple OUI, Gratuit OUI, Efficace pas tout à fait : ce piège capture TOUT, sans aucune sélectivité, et tous les insectes meurent noyés. C’est pour cela qu’il a fallu trouver une solution, réfléchir à ne capturer que le frelon asiatique sans piéger les autres insectes. Les pièges-bouteilles sont à bannir totalement : ils nuisent énormément à la biodiversité. Quand on se lance dans la fabrication d’un piège, il y a 3 caractéristiques essentielles à prendre en compte : La sélectivité : des entrées ni trop petites, ni trop grandes Les sorties des insectes : dimensionner les issues pour ne retenir que le frelon asiatique L’appât protégé : pour attirer et surtout éviter que les insectes s’y noient Si on n’en tient pas compte, cela devient un piège à biodiversité, contre-productif et dangereux pour la nature.1 point
-
très bon conseil, c'est moi qui l'ai fait1 point
-
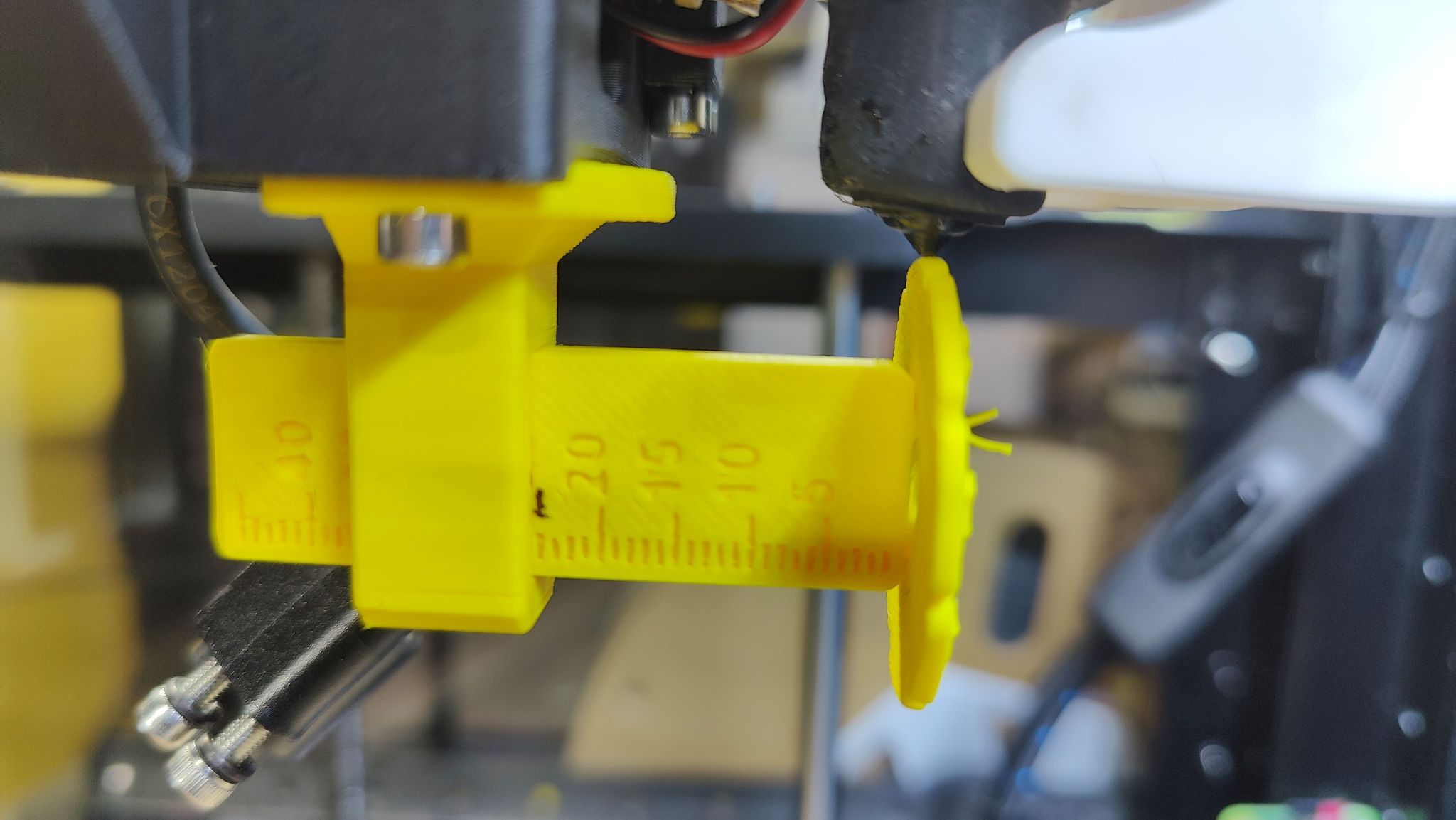
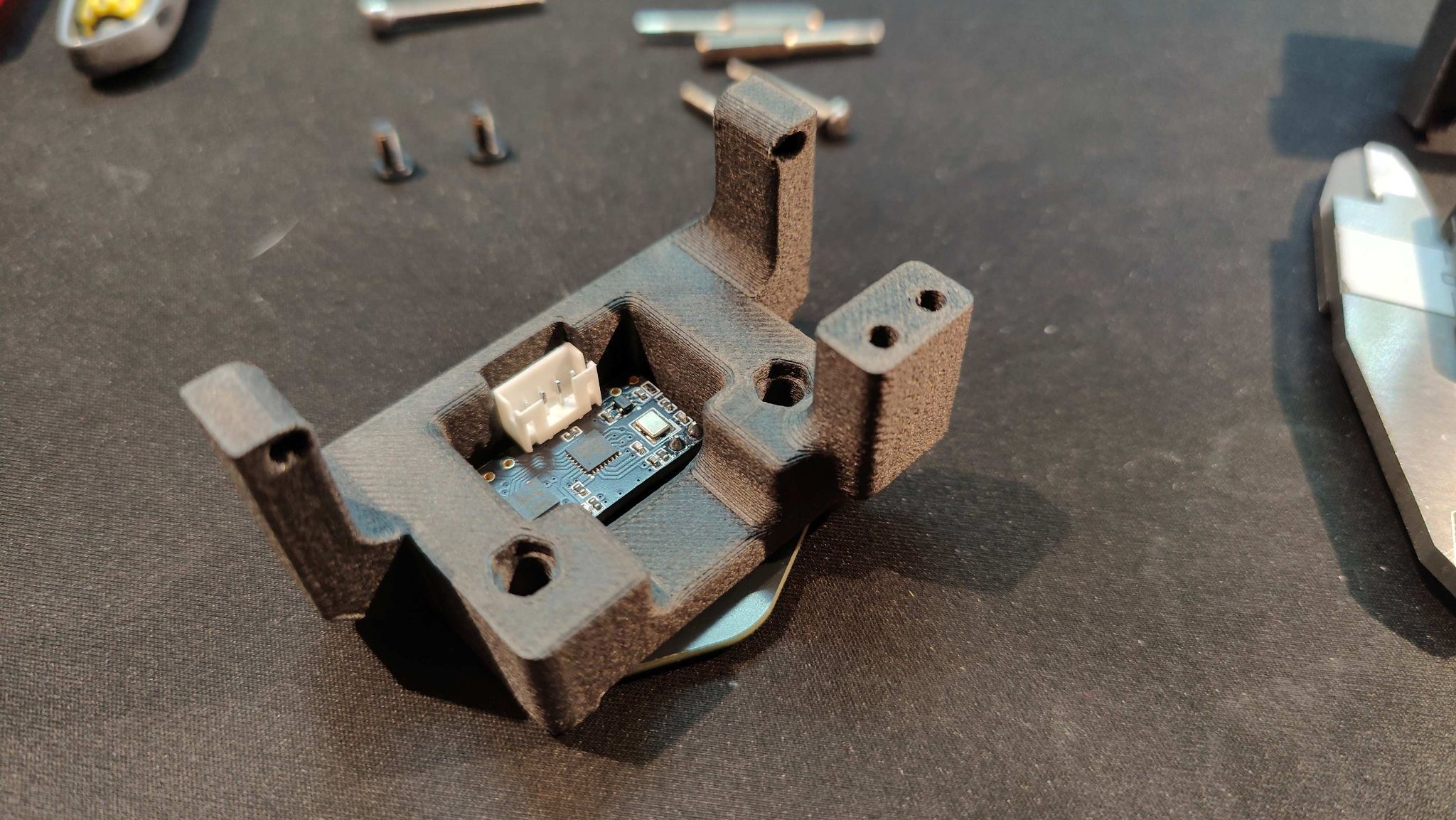
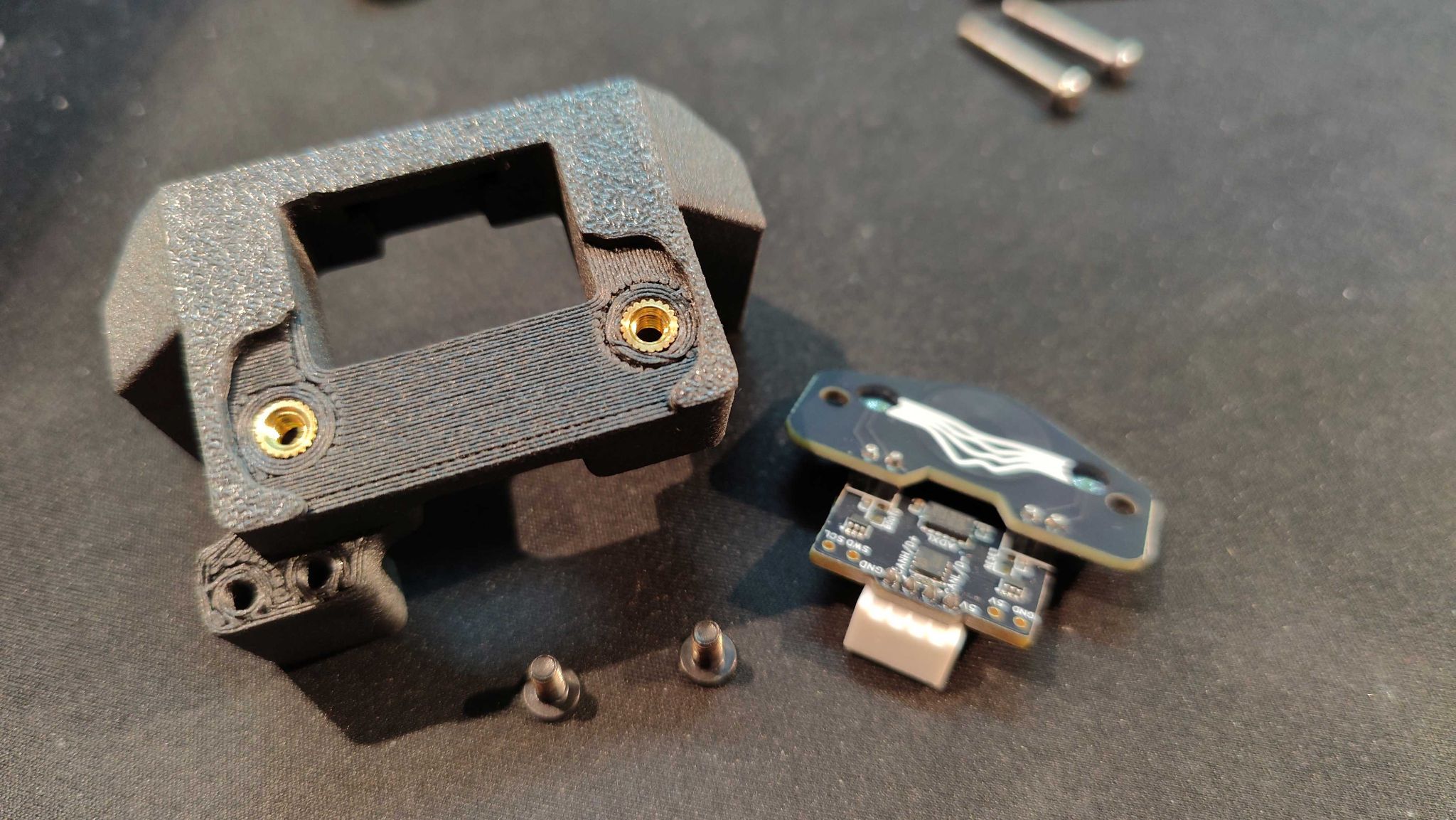
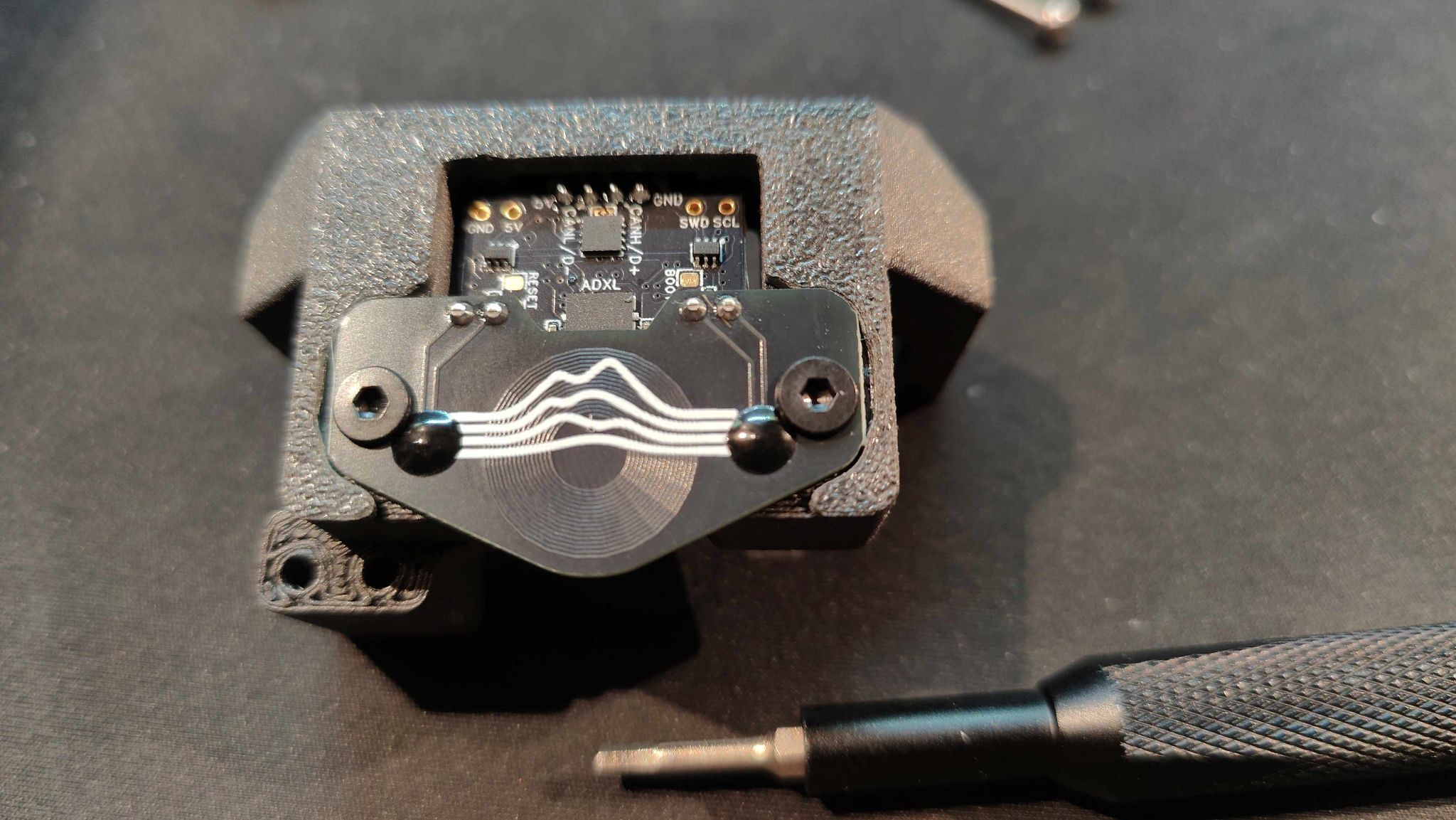
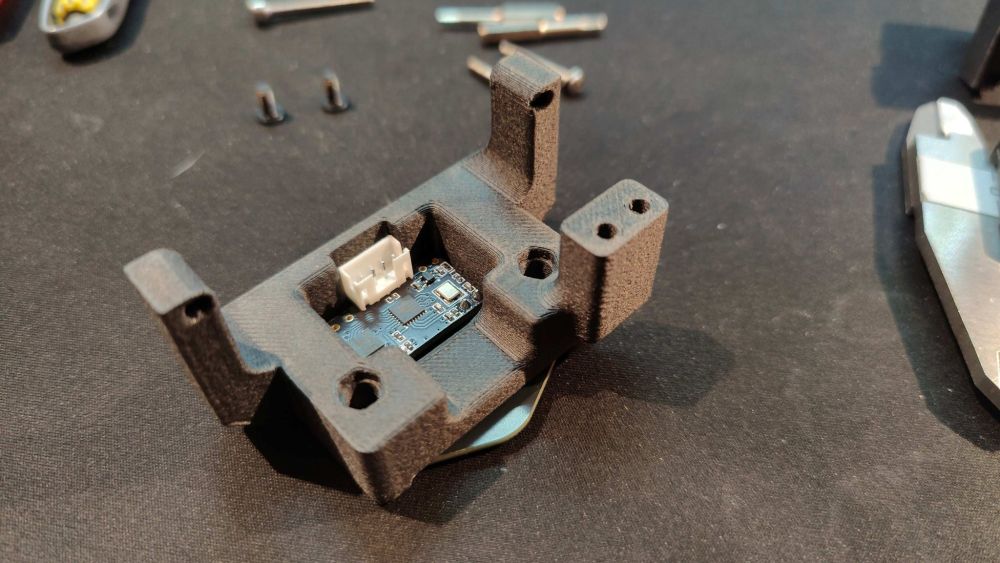
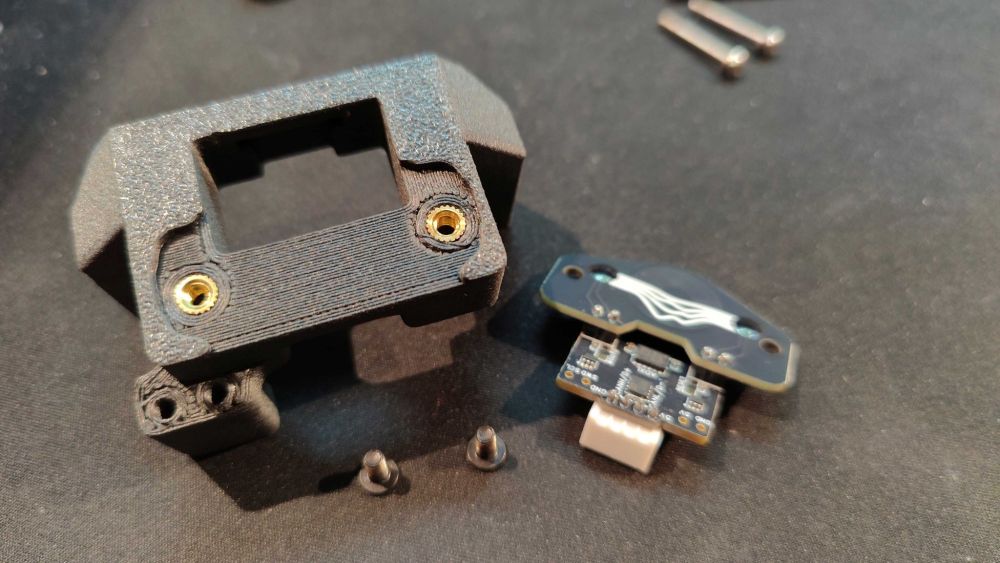
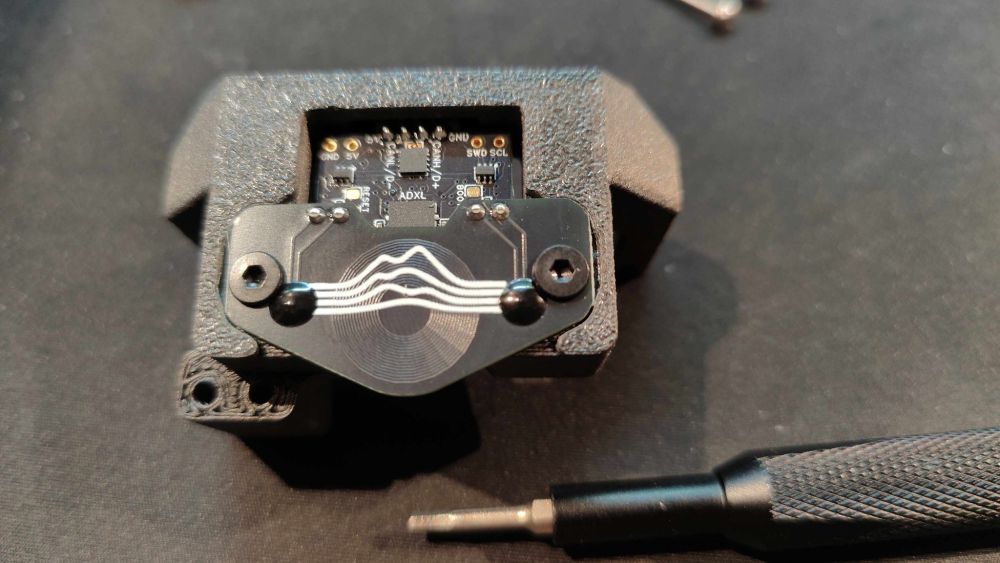
Pour faire suite à ce message, je me suis lancé ! En fait oui et non, je suis passé au capteur Cartographer 3D ! Pourquoi: - nettement plus rapide, - nettement plus précis, - vraiment plus facile à mettre en œuvre ! Les résultats sont très très bon, voir excellent, les premières couches sont parfaites et cela avec n’importe quel plateau métallique biface ou pas. J'entends par biface celui de Qidi avec une face PEA (ultra lisse) et l'autre PEI par exemple. J'ai acheté le capteur "standard", il en existe plusieurs en fonction des têtes d'imprimantes. Le capteur est vendu une trentaine d'euros sur leur site https://cartographer3d.com/ La documentation est pas trop mal faite https://docs.cartographer3d.com/ Pour l'installer et être tranquille par la suite, j'ai ajouté une prise USB double à souder sur la carte mère https://www.amazon.fr/dp/B00NQ9TN6E?ref=ppx_yo2ov_dt_b_fed_asin_title J'ai imprimé l'outil qui va bien pour régler la hauteur et profondeur par rapport à la buse (tout est expliqué dans la doc) https://www.printables.com/model/1060868-cartographer-probe-nozzle-offset-tool Une fois fait, j'ai du modifier ce support pour qu'il s'adapte à ma X-Plus3 https://www.printables.com/model/692991-qidi-x-max-3-beacon-cartographer-probe-low-profile Ensuite on dé-commente quelques lignes, on en ajoute d'autres dans le printer.cfg, puis étape de calibration initiale. Il existe deux modes de fonctionnement, le mode "scan" qui scanne le bed pour réaliser un mesh 3d super précis mais pas de z-offset automatique. Et le mode "touch" qui lui utilise le scan pour le bed mesh ET permet d'avoir un z-offset automatique et très précis, ça c'est génial !! Il faut simplement faire attention à ce que la buse soit bien propre avant les "touch" sur le plateau. J'ai donc modifié mon système de nettoyage de buse (brosse métallique + silicone) avant chaque print. J'en suis très satisfait et adieu les capteurs inductifs et autre !! Le système klicky est "trop lourd" à mettre en place et n'est vraiment pas aussi rapide que ce capteur et pour une trentaine d'euros ce n'est pas la ruine !
 1 point
1 point -
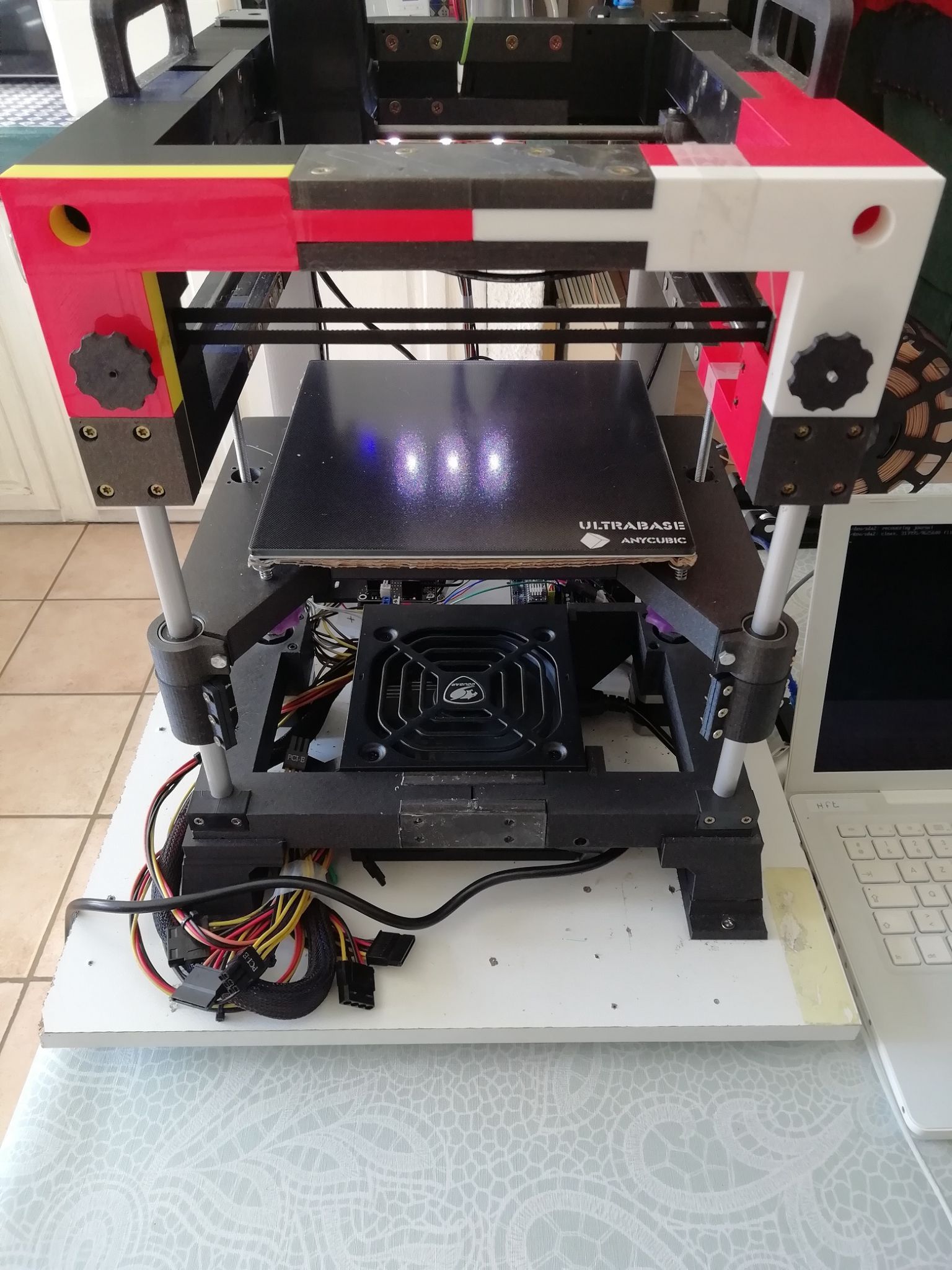
ca fait un bail que je n ai plus posté , voila mon dernier tres gros projet qui a durée 17 mois1 point
-
Merci pour ta réponse pommeverte, je suis souffrant depuis ce matin, j'espère pouvoir revenir vers vous bientôt. Merci0 points
-
le Sunlu j'en ai utiliser des dizaines et dizaines soit en filament de test soit acheter pendant plusieurs années j'ai arrêté d'en acheter comme la Jayo d'ailleurs car d'une commande l'autre la constance de la qualité du filament n'etait pas la, tu peux avoir de l'excellent comme du moyen ou du moins bon, le soucis pour moi c'est que quand je prend du filament je souhaite qu'il soit ok et avec une qualité habituelle constaté0 points