.jpg.ae6fefd0dbaf9d083a964a35003871a0.jpg)
Guillaume3D
-
Compteur de contenus
3 115 -
Inscrit(e) le
-
Dernière visite
-
Jours remportés
9
Tout ce qui a été posté par Guillaume3D
-
Mouais, outre le fait que cet argent supplémentaire serait parfaitement bien utilisé j'en suis certain, ce qui est sûr c'est qu'avec ces quelques euros de plus l'impression 3D, l'électronique et le bricolage n'aurait jamais pû faire partie de mes passions quand j'étais un peu plus jeune. Peut-être que tu n'es pas à quelques euros près, mais l'addition est vite salée, surtout quand on est jeune et avec peu de moyens. Une taxe serait justifié je ne dis pas le contraire, mais chaque euros compte de nos jours, et un bonus de 5 euros sur chaque commande de composants, pourrait faire reculer bien des jeunes qui s'intéresseraient dans ces domaines...
-
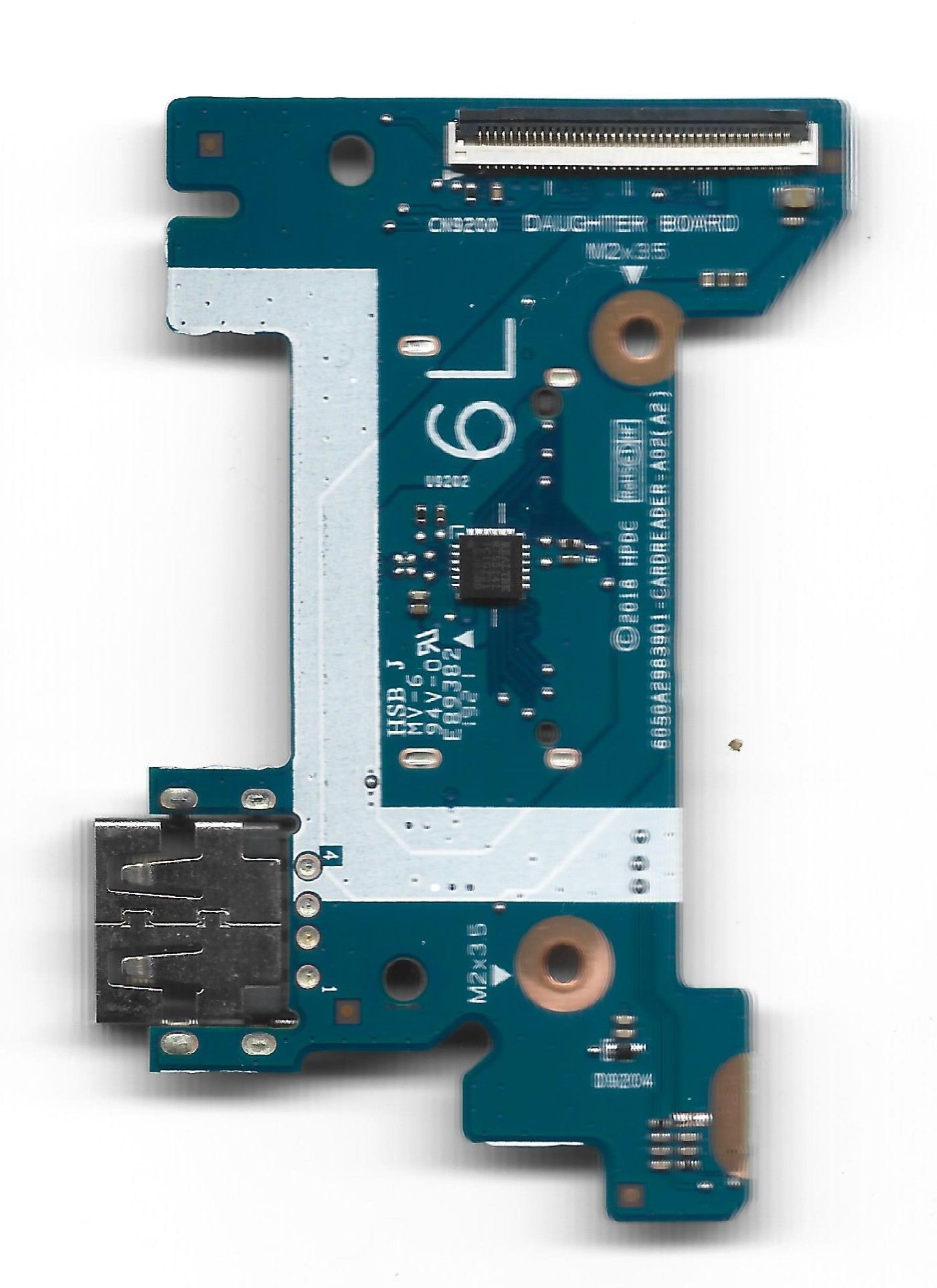
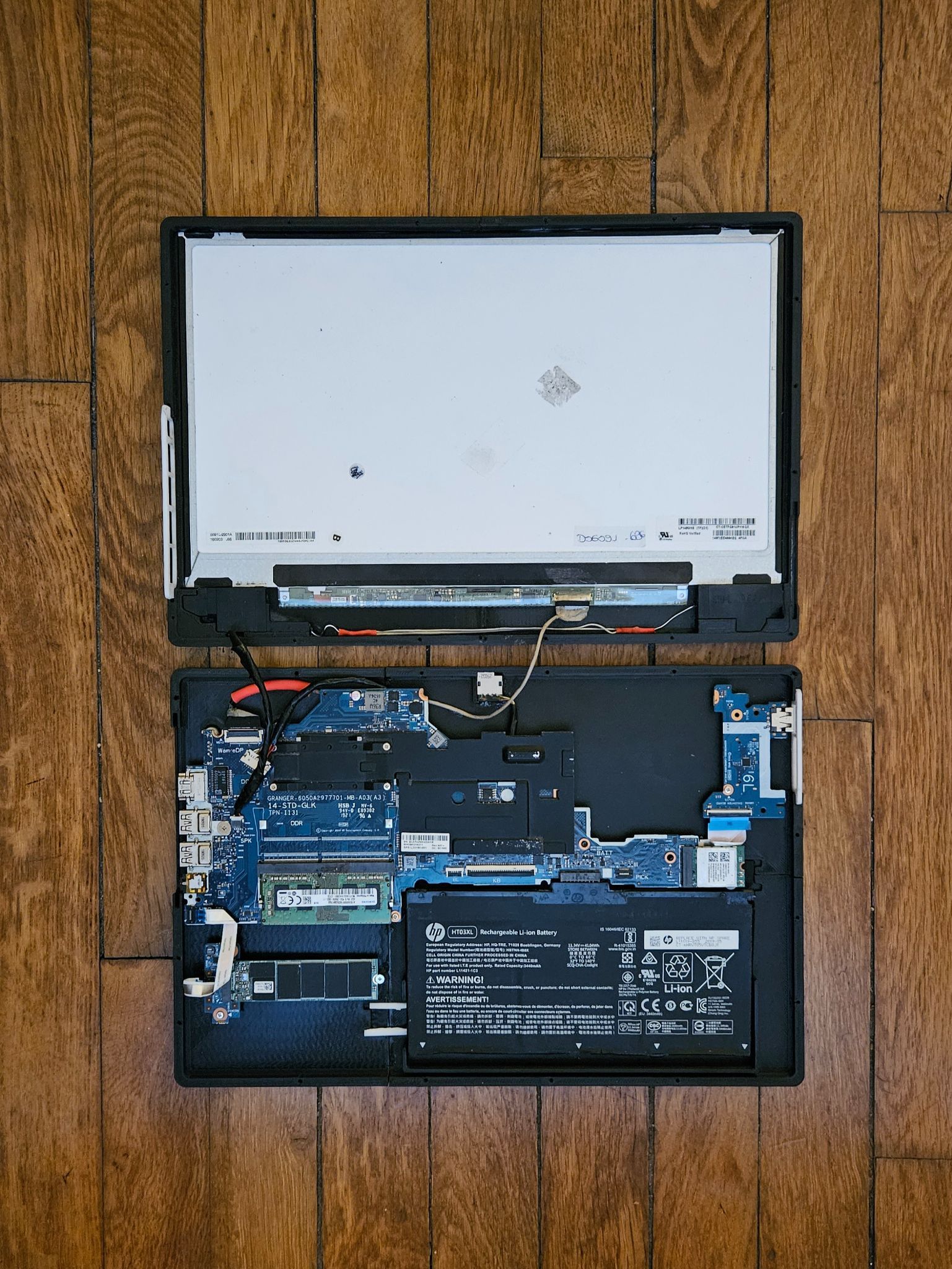
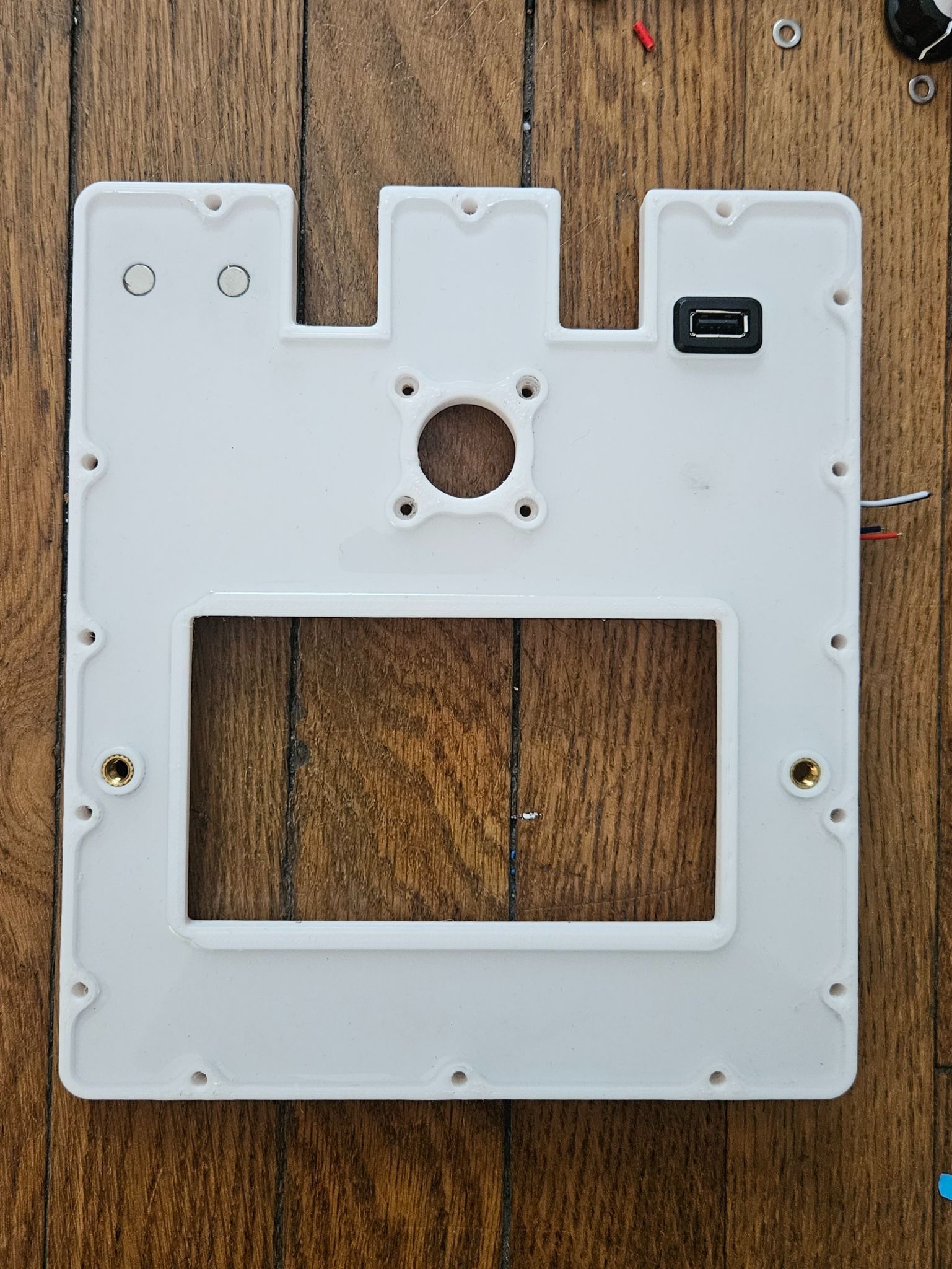
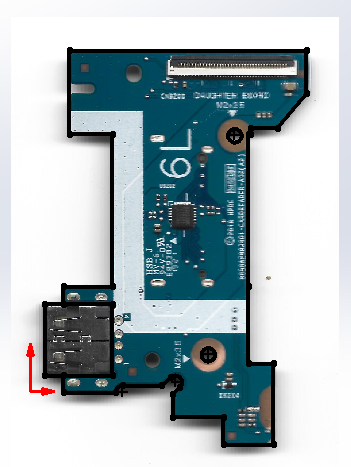
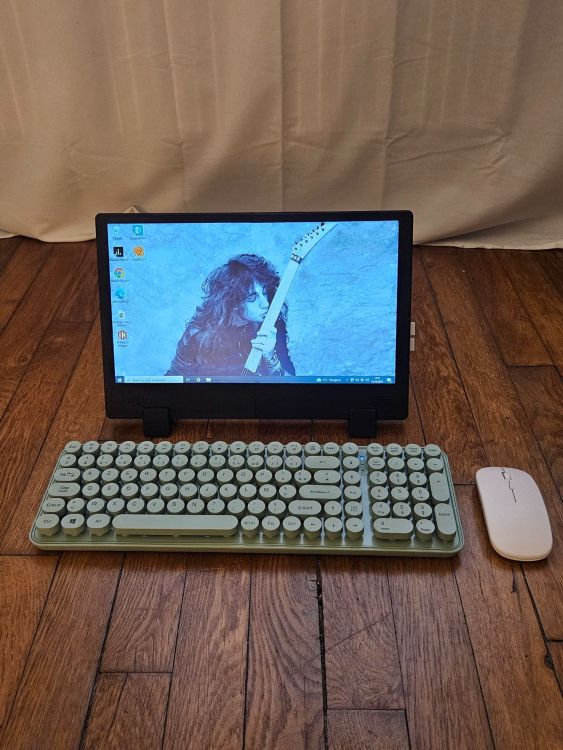
Bonjour à tous, Je viens de finir un petit projet et je me suis dit que ça pourrait donner des idées à certains Je voulais avoir un petit PC "fixe" uniquement dédié à ma pratique de la guitare que je pourrais laisser sur mon bureau, et j'avais sous la main les composant de mon ancien PC, un petit HP pas très puissant. Le châssis en plastique n'avait pas fait long feu, comme sur presque tous les PC assez bas de gamme, mais les composants étant toujours bons alors je me suis lancé : J'ai d'abord modélisé toutes les pièces de la carte-mère en prenant les cotes au pied à coulisse, mais j'ai finalement recommencé de A à Z car ce n'est pas précis sur de grandes pièces. J'ai alors scanné la carte mère, et j'ai recréé les esquisses par dessus. C'était la première fois que j'utilisais cette technique, et c'est très simple et relativement précis. Le PC fonctionne très bien, n'ayant seulement que l'écran, la batterie et la carte-mère, j'ai dû acheter la souris et le clavier qui vont avec. Le bouton d'allumage est derrière, c'est le pin blanc à droite de l'aimant sur la prochaine photo. Le seul problème est dû aux aimants qui servent à maintenir les supports, car ils sont trop proche du capteur à effet hall et quand ont les mets en position l'écran s'éteint car le système pense que le capot est refermé, pas très grave je bouge juste de 5mm les supports. Le PC fait 21mm d'épaisseur, un peu épais mais difficile de faire une conception robuste en affinant trop les paroies. J'ai pas grand chose de plus à ajouter, c'était simplement pour montrer comment redonner gratuitement (ou pour 15euros / clavier+souris) vie à un vieux PC Si vous avez des questions n'hésitez pas






-
- 13
-

-

-
.thumb.jpg.8e4f3c7962529d5b54999ca8667a07c0.jpg)
- autre - Améliorer la stabilité, blindage ?
Guillaume3D en réponse au topic de Guillaume3D dans Électronique
C'est fondamentalement différent d'un limitateur de tension/courant ? Lors de mes tests je ne touchais qu'au potard de courant, de 0,2A à 0,8A la tension s'ajustait toute seule de 17 à 19V environ. Je n'ai pas envie de vous faire vous répéter, mais c'est vraiment un domaine que je ne maîtrise pas Si les liens Ali sont autorisés sur le forum, tu peux m'en envoyer un s'il te plaît ? J'avais regardé mais c'était vraiment des gros modules, et pas à moins de 30/40€. -
- autre - Améliorer la stabilité, blindage ?
Guillaume3D en réponse au topic de Guillaume3D dans Électronique
Bon et bien j'aurais dû faire plus gaffe J'ai presque entièrement remonté la machine (il manquait plus que le réservoir) et lors de mes premiers tests j'ai cramé la moitié de mes LEDs plutôt rapidement... Après analyse, c'est mon potard de régulation de tension qui est HS et qui délivrait donc du 24V au lieu de 21V. Ça a cramé au moment où j'ai commencé à faire joujou avec la commande en PWM, elles étaient donc alimenté en 24V par intermittence. Pour régler ça : -> Nouveau potard pour la régulation de tension -> Plus de PWM, le MOSFET sera piloté depuis une sortie numérique Je vais éplucher la datasheet de mon régulateur de tension/courant, pour dimensionner un combo condensateur/résistance/diode pour lisser la tension de mon régulateur qui semble se fatiguer au bout de plusieurs heures . -
- autre - Améliorer la stabilité, blindage ?
Guillaume3D en réponse au topic de Guillaume3D dans Électronique
Je pilote pourtant mes LEDs en courant, avec un tension très légèrement supérieur à la tension nominale (mais avec un courant légèrement réduit, pour avec une marge de sécurité). C'est la même chose que de les piloter en puissance ? Mes LEDs sont indiqués pour 7V chacunes, avec une conso de 700ma. J'en ais 15, 3 branches en série et 5 en parallèle. J'ai réglé mon convertisseur à 3,3A max (5*700ma*0,9) avec une tension de 23V (3*7+2 de sécu). Merci pour la piste des résistances, je vais étudier ça ! -
- autre - Améliorer la stabilité, blindage ?
Guillaume3D en réponse au topic de Guillaume3D dans Électronique
Ça me chiffonne, car ça me le faisait alors que je mettais toujours 100% de la puissance (255). J'envisageais aussi une possible fatigue du driver, qui délivrait avec le temps et la chauffe une tension (ou un courant ?) moins stable. Uniquement pour faire mes tests, je voulais pouvoir baisser numériquement la puissance des LEDs sans devoir démonter le driver et le régler (baisser la puissance si je m'apercevais que l'écran chauffait trop). C'est chose faite et encore amélioré avec la v2 ! J'ai 4 sondes maintenant, une sur le dissipateur, une sur les parois du réflecteur, une sous l'écran, et une pour mesurer la chaleur à l'intérieur du caisson Mais la commande PWM est maintenant obsolète, je peux maintenant régler la tension et le courant max directement avec des potards sur mon panneau latéral, avec un écran qui affiche la tension/courant/puissance de l'ensemble. Mais bon, mon module est là donc je le garde dans le circuit pour faire mes tests (je peux donc le virer si je m'aperçois que c'est bel et bien lui le problème). Uhm, ça m'embête je n'ai vraiment pas la place pour mettre 3 drivers et je suis obligé de rester sous les 24V À part une luminosité accrue sur un ou deux groupe de LEDs branchées en série, ça peut poser un autre problème ? Il n'y a pas des composants que je peux souder entre les groupes pour faire un courant égal ? -
- autre - Améliorer la stabilité, blindage ?
Guillaume3D en réponse au topic de Guillaume3D dans Électronique
Super @electroremy, merci beaucoup pour ta réponse, j'y vois déjà un peu plus clair Uhm pas simple tout ça... Que penses-tu des anneaux en ferrite ? "utilisées pour supprimer les interférences électromagnétiques et le bruit" J'avais un soucis d'oscillation de la luminosité des LEDs après quelques heures d'impression, je n'ai pas encore identifié l'origine de ce problème. Les LEDs sont controlées par un relais PWM relié à une sortie de l'Arduino, tu penses qu'un anneau en ferrite pourrait supprimer les possibles interférences que peuvent recevoir ce câble ? J'avais fait gaffe à avoir une masse commune et à me brancher le plus possible directement sur l'alimentation, une masse jamais coupée et le + toujours coupé que ce soit dans les relais ou les mosfets. -
Présentation MK2s+ : Prusa MK2s avec firmware custom et caisson thermorégulé
Guillaume3D en réponse au topic de electroremy dans Discussions
Beau travail et super bien documenté ! -
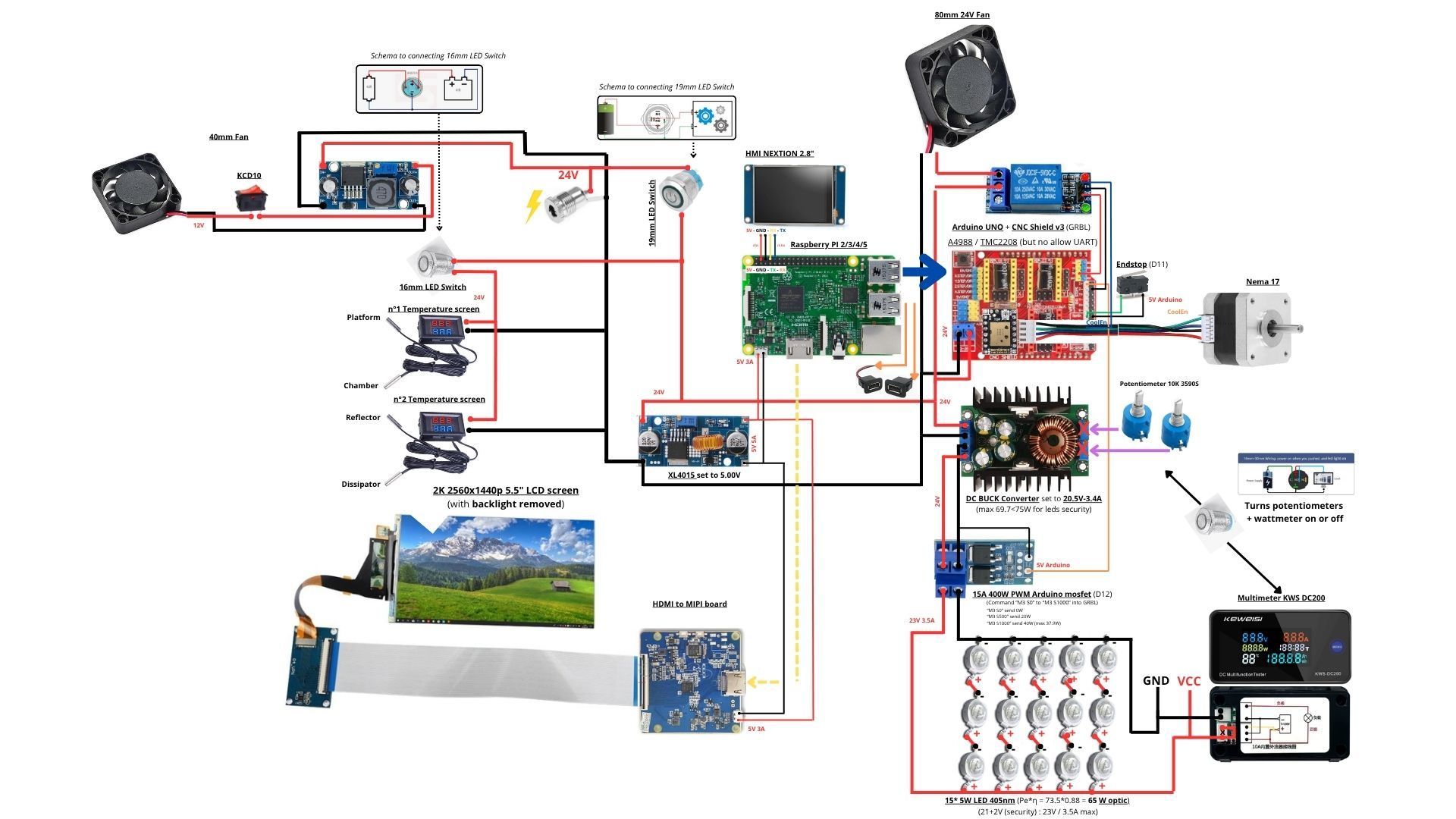
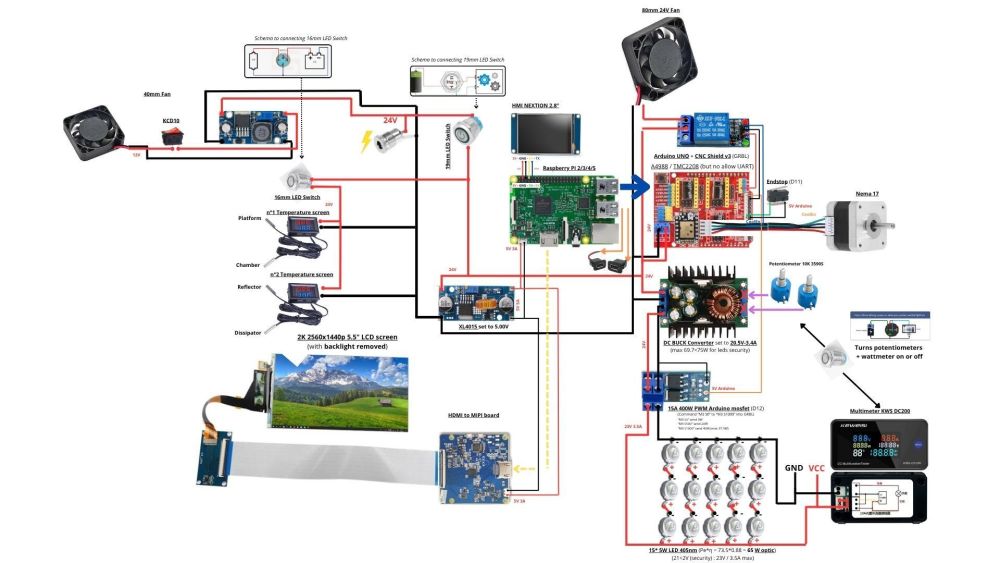
Bonjour à tous, Je m'attaque à l'électronique de mon projet d'imprimante résine maison. Voici le schéma actuel : Je m'y connais vraiment peu en électronique, et j'aimerais que tout soit le plus stable possible. Il me semble qu'il faut un point de masse centrale, plutôt que des masses éparpillés. Je sais déjà qu'il faut séparer le plus possible les câbles de puissances de ceux des signaux, mais à part ça, est-ce qu'il y a des résistances, condensateurs, ou d'autres composants que je pourrais rajouter à des endroits stratégiques pour que tout soit le plus stable possible ? La partie sensible est la matrice de LEDs, qui consomme 3,5A à 21V avec comme driver un DC Buck Converter qui limite le courant et la tension maximale. Je vous remercie pour votre aide
-
Salut, ça aurait été une bonne piste mais non, c'est toujours après 1-2h d'impression je dirais. J'ai amélioré le refroidissement des LEDs, j'ai diminué de plus de la moitié le courant passant dans le driver des LEDs, et les cartes de conversion de tension sont maintenant des autres modèles plus fiable. En espérant que ça règle le problème
-
Salut @3xkirax3, merci Je sens que la partie difficile va être le câblage, il y a énormément de composants et c'est difficile de tout caser à l'intérieur de la machine. Les profilés prennent 40mm sur la largeur et la hauteur du "caisson", et ayant de "petites" imprimantes, les plus grandes pièces ne peuvent excéder environ 200*230mm, ça ne laisse plus beaucoup de place . De plus, les câbles prennent beaucoup de volume et s'entrecroisent.. Si j'avais eu les capacités, j'aurais créé une carte mère globale haha En tout cas après tout ça, je suis presque sûr qu'il n'y aura pas de v3 !
-
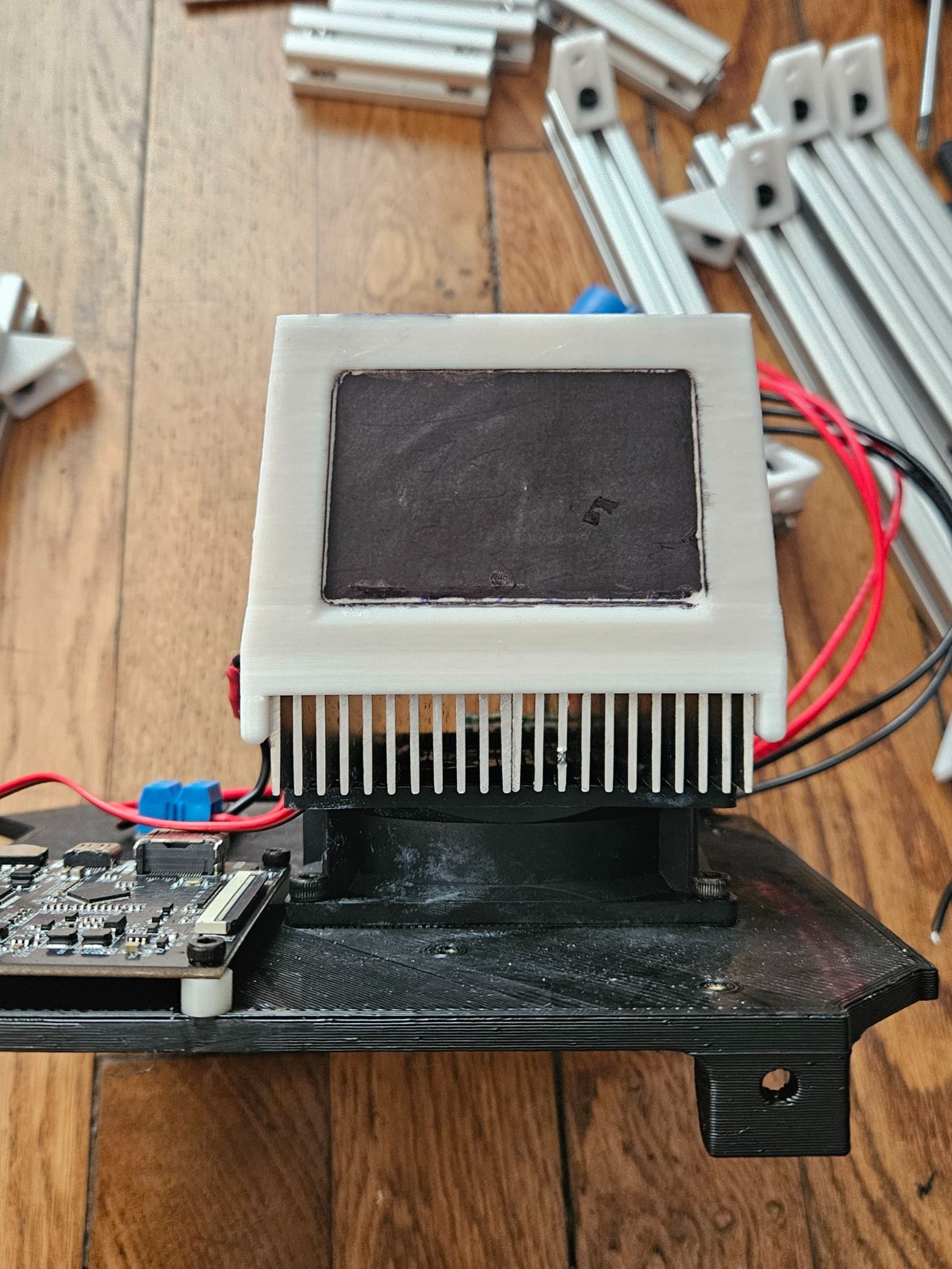
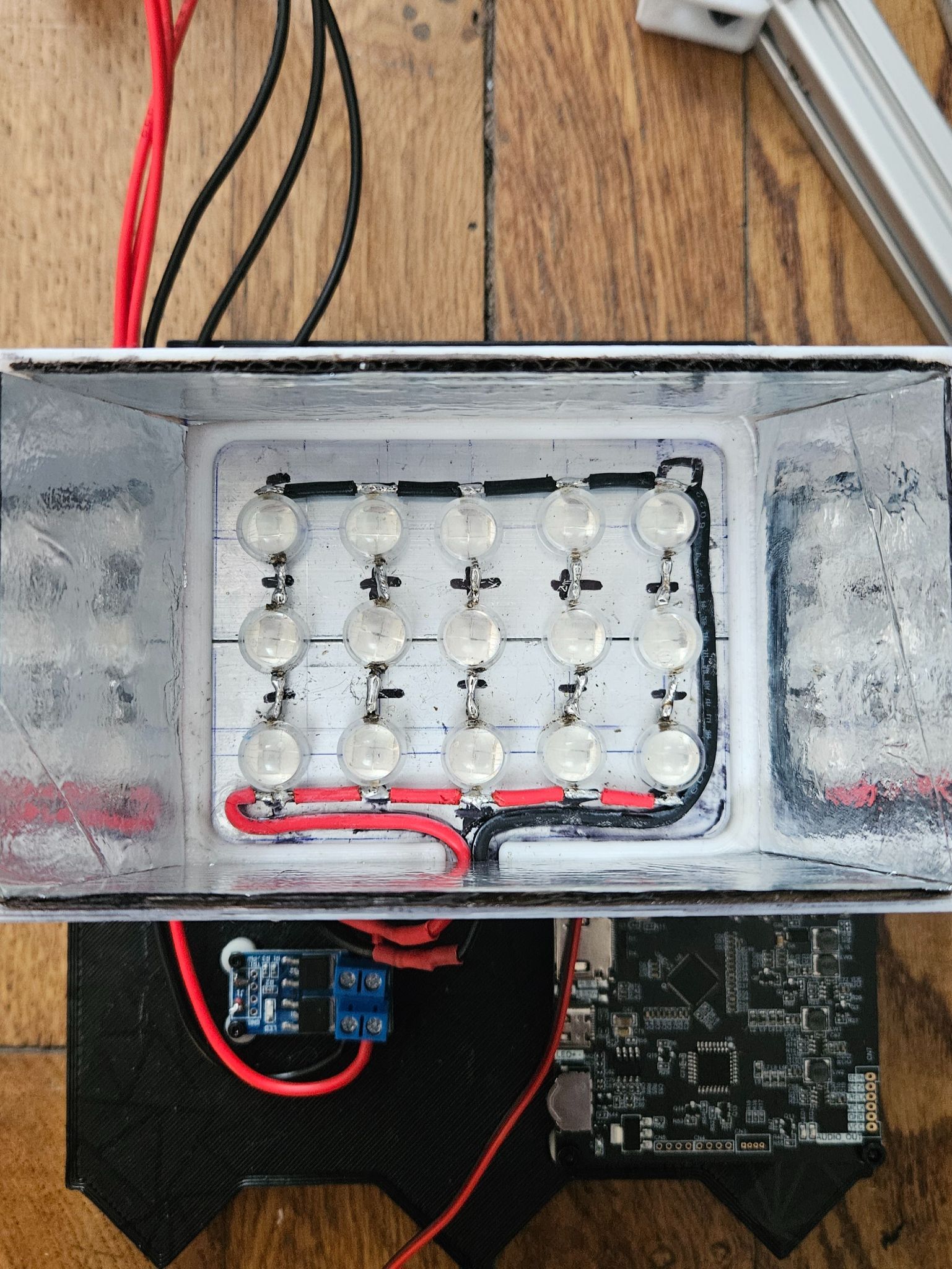
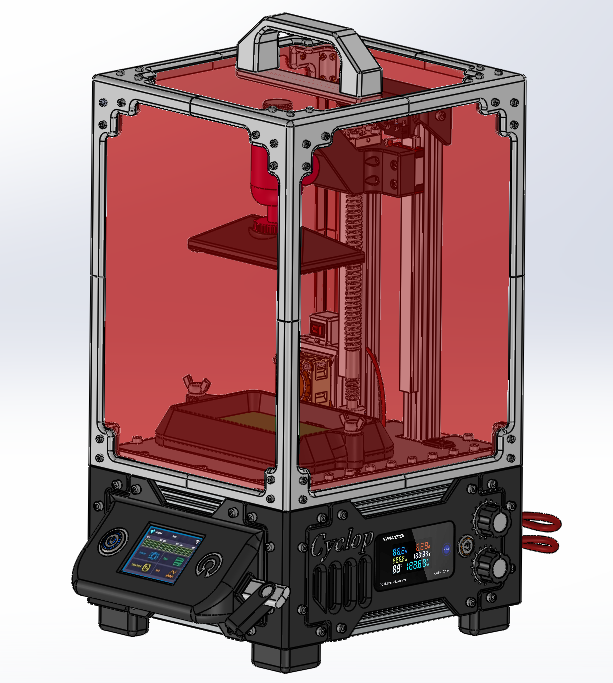
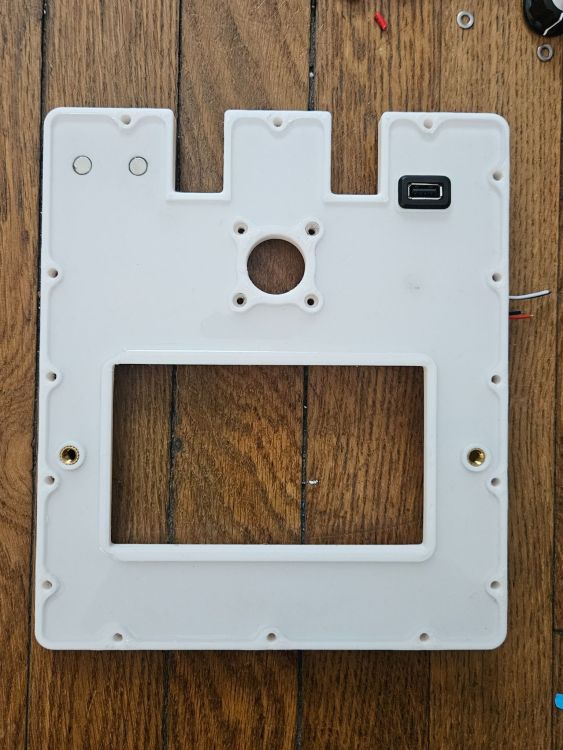
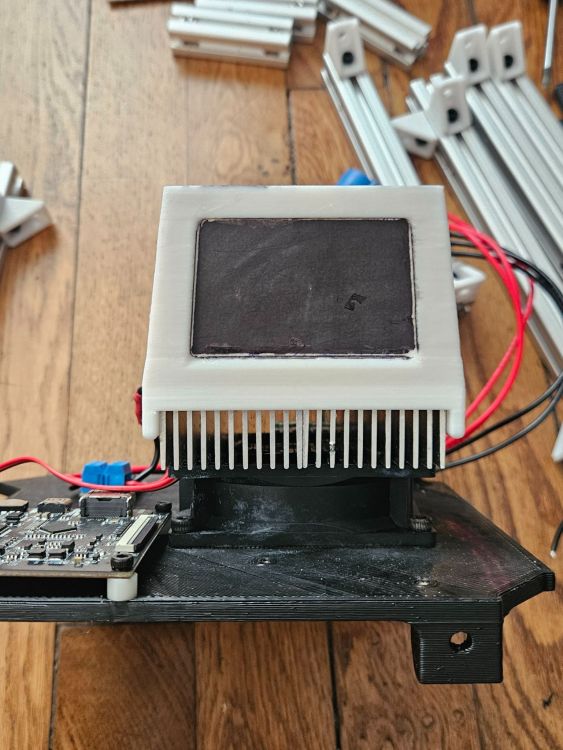
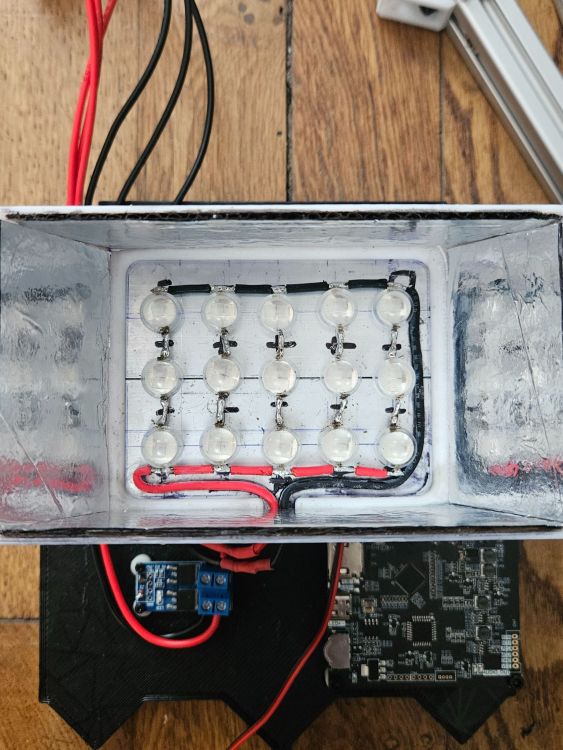
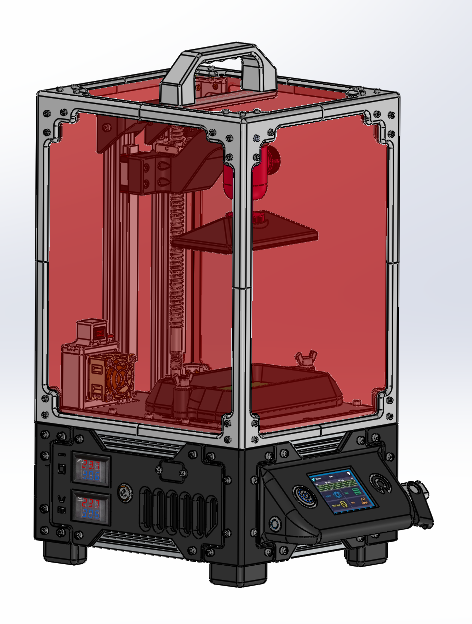
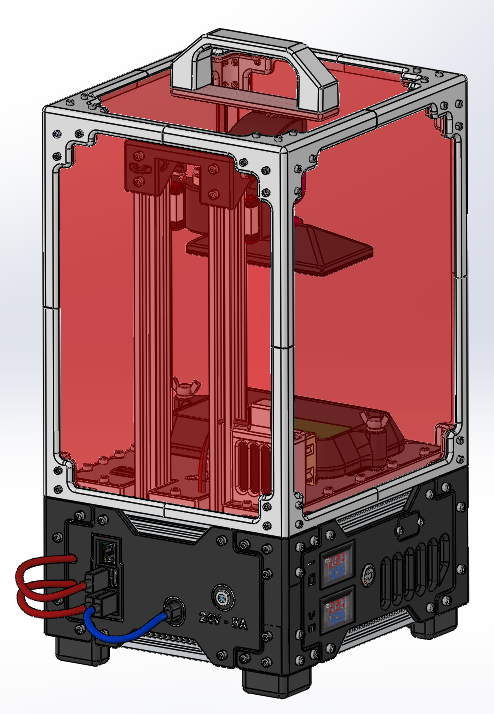
Bonjour à tous, Quelques news de la v2 en cours d'assemblage ! Bon, évidemment, encore une fois tout a changé Chaque pièce est améliorée, et je ne saurais même pas par où commencer. En gros maintenant : plus de problèmes (j'espère du moins) 3x plus de puissance UV (donc gain de rapidité) beaucoup moins bruyante (ventilo silencieux + TMC2208) moins de vis, assemblage/démontage rapide régulation en direct de la puissance + 4 endroits où la température est relevée passage de 12V à 24V Lit d'impression monté sur rotule câblage propre, électronique stable, ports USB (pour éclairage LEDs et caméra RPI en option) Le problème majeur est que la résine ronge le plastique, d'après mes tests le PLA résiste un peu mieux que le PETG. J'applique donc de la résine époxy sur toutes mes pièces en contact avec. Pour la plaque supérieure soutenant le réservoir, j'ai coulé de la résine directement dessus, les parois étant plus hautes que le fond. Heureusement je n'ai pas oublié de placer les aimants avec de mettre la résine J'ai mis quelques gouttes de résine sur le revêtement en époxy, et après 2 jours de contact il n'y a rien eu, ce qui me rassure. Grâce à @Kachidoki et l'i3-RDX, mes plaques latérales sont maintenant en double couleur Les plus grosses modifications sont au niveau des LEDs et de l'électronique. Je passe de 4 LEDs 10W à 15 LEDs de 5W, pour une puissance max d'environ 75W. J'utilise donc une alimentation de 24V pour soulager l'intensité présente dans la machine (21V et 3,5A niveau UV). Un ventilo de 80mm positionné verticalement vient refroidir les dissipateurs sous les LEDs. Des lentilles de 60° sont positionnées sur les LEDs, afin d'optimiser le flux lumineux venant sous l'écran. Le réflecteur est maintenant recouvert de Mylar et non plus d'aluminium. J'avais prévu d'assembler l'imprimante rapidement, mais il me manque encore quelques pièces à recevoir, l'électronique a changé entre-temps (régulateurs DC) Voici le schéma électrique, qui est un peu plus complexe qu'avant : A bientôt

-
calibration aux petit ognions d'une imprimante delta sous marlin
Guillaume3D en réponse au topic de Dgils dans Le coin des Deltas
Super, merci ! -
@Mad_Printer Oui j'avais fait une sorte de Recreator, mais je n'avais pas "extrudé" plus d'une vingtaine de mètres de filaments, juste pour faire "joujou" mais le vrai filament fonctionne quand même mieux Pour couper les bandes de plastique, j'avais conçu un petit boîtier avec une lame de cutter, et comme tu l'as souligné, y'avais pas mal de jeu et la précision était pas top (en plus du fait de devoir utiliser des bouteilles assez homogènes sur leur longueur, celle que j'avais avaient des motifs en relief ) T'as une photo de ton dispositif ? Ça m'intéresse !
-
En effet elle est plus légère que celle que j'avais imprimée ! De mémoire j'était à 4/5kg juste pour le corps 3kg de plastique, 2kg de mastic Wouah ça doit en envoyer ! C'est toi qui a conçu les fichiers du corps ? T'as un emplacement pour la pile ? J'avais aussi hésité avec la RG450DBX, elle a l'air vraiment sympa (puis elle a un meilleur floyd rose haha)
-
Salut tout le monde, magnifique ta guitare @Mad_Printer ! J'adore la touche "Tree Of Life" et l'acastillage doré (j'adore tellement le TOF, que je me suis pris une Jem Jr tout récemment!) Elle pèse combien avec les évidemments ? Bienvenue sur le forum
-
Logiciel montage vidéo gratuit et basique
Guillaume3D en réponse au topic de electroremy dans Blabla
Je vois qu'il y a des choses qui ne s'oublient pas Un peu occupé ces derniers temps, mais toujours un plaisir de vous lire -
Ça fait 5/6 ans que j'achète sur AliExpress des composants en tout genre (pour des commandes de 10 à 150 euros), et je n'ai eu que 2/3 fois un problème, ce qui doit représenter même pas 1% de mes achats. La dernière fois c'était il y a 2 semaines, et il me manquait un composant (5/6 pontets de guitare) : bon, moi je préférais recevoir la pièce manquante de la part du vendeur mais eux voulaient initialement que je renvoie les pièces avant d'être remboursé. Après avoir bataillé un peu, ils ont décidé de me rembourser entièrement, sans doute qu'ils seraient plus perdants sur l'envoi d'une pièce unique. A chaque fois que j'ai eu un litige, j'ai été remboursé très rapidement (48h, et étant un bon client je pense que ça aide aux négociations), mais ce qui est dommage, c'est que l'on a très souvent affaire à Aliexpress eux-mêmes pour la résolution de litiges, et que les vendeurs sont souvent des vendeurs fantômes, impossible de contacter un humain, on a affaire très souvent à des bots de leur "boutique"... Autre détail de plus en plus actuel, la livraison est très rapide (environ 7 jours ouvrés), mais les commandes étant acheminées par avion, je pense que si l'on veut avoir la plus faible empreinte carbone possible, il est préférable d'attendre et de faire des commandes cummulées.
-
Mon projet d'imprimante 3D Delta
Guillaume3D en réponse au topic de Guillaume3D dans Le coin des Deltas
Salut @Dgils, je te remercie pour toutes ces remarques vraiment pertinentes J'ai recherché ma CAO qui date un peu (et n'a pas qui n'a pas bougée depuis) car j'ai plus tout en tête J'avais bien effectué les mesures et l'imprimante peut utiliser 100% de sa surface fonctionnelle avec les paroies en place, sans risque de collision J'avais assez hésité cependant j'ai encore quelques doutes, ma conception était orientée pour la vitesse, et utilise une tête Volcano CHT à haut débit (0.6/0.8) qui nécessite un fort refroidissement, et de plus une tête "symétrique" est mieux équilibrée Je comptais utiliser la fonction Stallguard des TMC2209, mais je me suis rendu compte (après l'avoir testé sur ma P3Steel) que la répétabilité n'est pas bonne, j'utiliserai sûrement des fins de course optiques J'ai peur que l'extrudeur n'ait pas assez de couple pour tirer le filament sur une telle distance, l'imprimante fait 75cm de haut d'autant plus qu'il devrait tirer et pousser le filament, et non plus uniquement le pousser d'une manière et dérouler la bobine d'une manière plus "gravitaire"... Mais c'est sûr que cela améliorerait la stabilité ! Tu vises juste, je n'y avais pas pensé et visait la précision grâce à un montage d'équerre Tu pourrais partager une photo stp ? La fixation du plateau m'avait pas mal cassé la tête... Pour toutes ces suggestions, tu as entièrement raison, je modifierais ma conception quand je reprendrais le projet : -
Conversion de positions "cartésiennes" en autres
Guillaume3D en réponse au topic de Guillaume3D dans Discussions sur les logiciels 3D
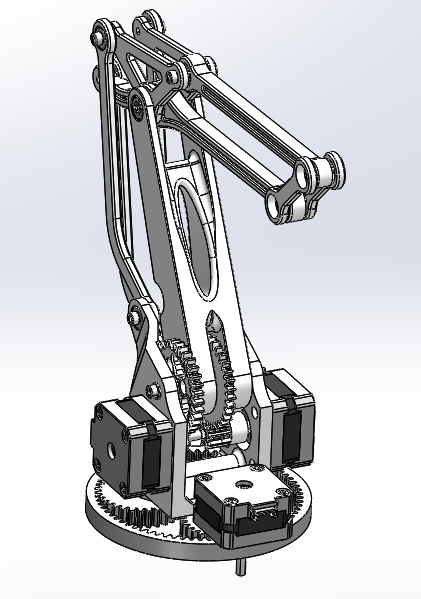
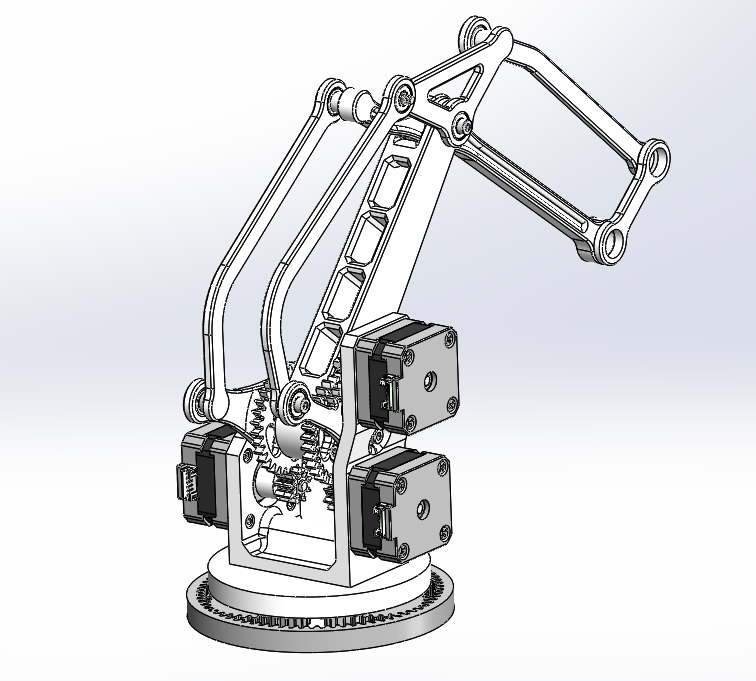
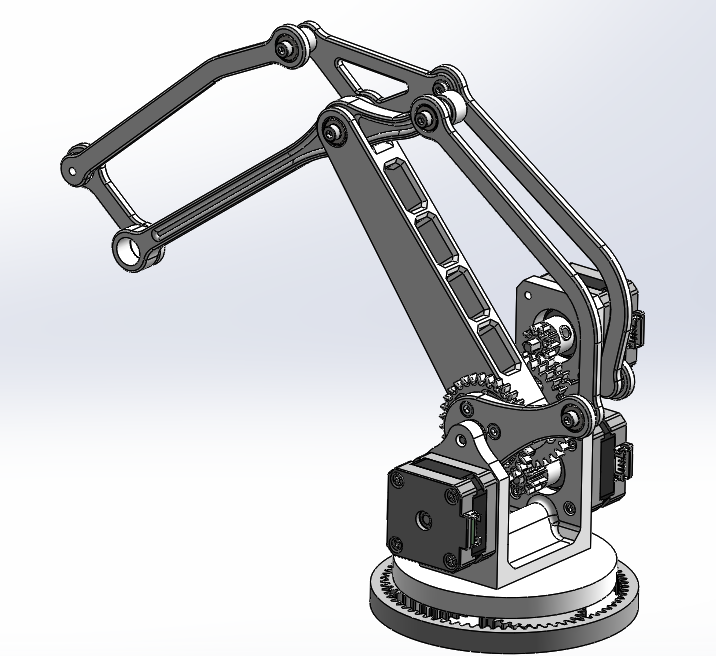
Salut, nop le projet est en pause depuis avril Je manque affreusement de temps depuis quelques mois, et ça commencer même à faire bien longtemps que je n'ai pas imprimé de pièces... Dès que j'aurais un peu de temps libre, j'installerai la v2 de mon imprimante résine, c'est mon projet prioritaire. Mais je suis étonné de ne pas avoir partagé des captures de ma CAO du bras robot ici, j'avais casiment terminé de mémoire et il ne me restait plus qu'à dessiner un petit effecteur pour un E3Dv6, et à améliorer la fixation du bras robot sur son support (car la majorité des projets consistent à visser le bras sur une planche en bois, ça ne me plaît pas trop). Bon, voici quelques captures d'où ça en est aux dernières nouvelles haha, honnêtement j'avais presque oublié le projet : J'avais conçu une version 4 axes, mais bon le 4ème axe était casiment inutile et compliquait tout, alors je l'avais viré pour repasser à une version 3 axes plus basique, et bien plus simple à piloter. D'ailleurs à ce que je vois, j'avais commencé à explorer les engrenages planétaires La vieille version 4 axes :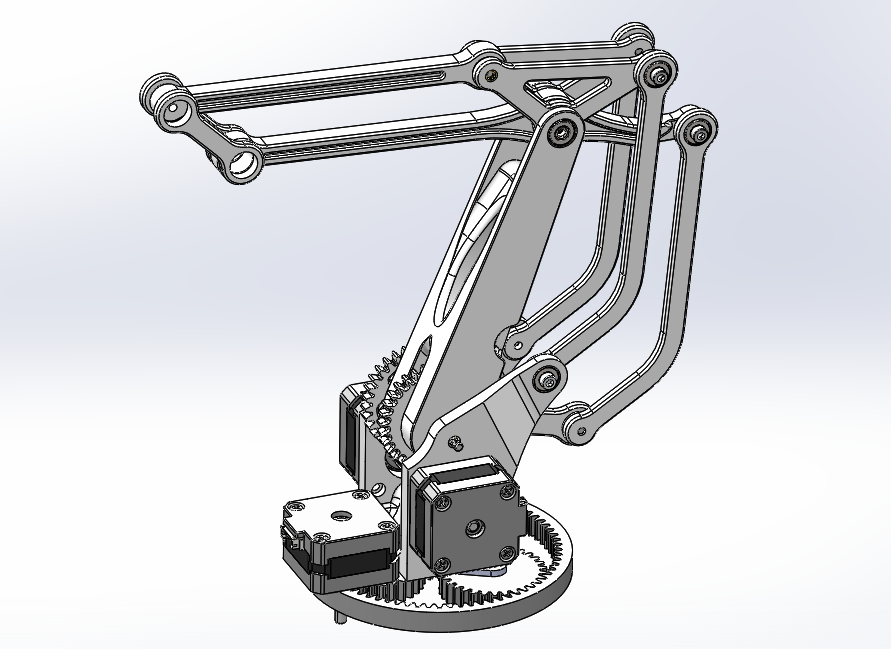
-
prusaslicer Difficulté Prusaslicer pour i3RDX
Guillaume3D en réponse au topic de Kylou86 dans Paramétrer et contrôler son imprimante 3D
Oui exact, je voulais avoir la miniature du .gcode qui s'affichait lors de l'impression à la place de l'icône Babystep, ça permet de s'assurer que le fichier sélectionné est le bon Plus d'infos sur le script et son installation dans PrusaSlicer ici : https://github.com/effgarces/Biqu-Thumbnail-Generator @Kylou86 La sélection du mode se fait par des commandes dans le start-gcode (T0/T1 et M605 S* de mémoire), donc si les profils sont importés au bon endroit, tu as ces lignes dans la partie start-gcode : Extrudeur gauche : Extrudeur droit : Mode duplication : Mode miroir : Dual colors : -
De la 3d a l impression (2018)
Guillaume3D en réponse au topic de razor dans Projets et impressions 3D
Époustouflant ! Je suis resté scotché durant toute la vidéo J'ose pas imaginer le travail de dingue derrière... -
Logiciel de dessin pour des enfants de CM
Guillaume3D en réponse au topic de divers dans Dessiner / modéliser en 3D
En info complémentaire vu que je ne suis pas bien vieux, mais quand j'étais en CM2 (en 2014-2015), j'ai le souvenir qu'on avait déjà eu des "cours" sur les ordinateurs. D'ailleurs y'avais des ordinateurs de disponibles dans une salle, accessible dès le CP et bon nombre d'entre nous les utilisaient pour jouer avec Paint ou d'autres logiciels déjà installés. C'était y'a 10 ans (dans une petite ville) et on savait déjà utiliser les principales fonctions d'un ordinateur, je pense que c'est toujours le cas actuellement. D'ailleurs Blender et SketchUp étaient installés sur les ordinateurs du collège, mais je n'ai pas vu grand monde les utiliser aussi tôt haha -
Logiciel de dessin pour des enfants de CM
Guillaume3D en réponse au topic de divers dans Dessiner / modéliser en 3D
Salut, personnellement je déconseillerai SketchUp, c'est le premier logiciel que j'ai découvert (au collège, en 6/5ème en cours de techno), et j'ai eu beaucoup de mal à m'adapter à d'autres logiciels ensuite; de plus je trouvais la création pas très intuitive et la modification des pièces très difficile à faire, je pense que j'aurais été plus à l'aise avec ThinkerCad à l'époque. Bon honnêtement j'ai détesté SketchUp, mais c'était y'a quelques années, mon avis est sûrement pas très objectif -
Belle machine, profilés alus et rails linéaires, elle a l'air d'être costaud ! Tu as vérifié la connection des 5 câbles mais au niveau de la carte mère ?