Yo'
-
Compteur de contenus
3 410 -
Inscrit(e) le
-
Dernière visite
-
Jours remportés
26
3 abonnés


À propos de Yo'

Visiteurs récents du profil
22 547 visualisations du profil





Récompenses de Yo'
")
Grand Master (14/14)
-
 Rare
Rare
-

-
 Rare
Rare
-

-

Badges récents
1,3k
Réputation sur la communauté
1
Sujets solutionnés !
-
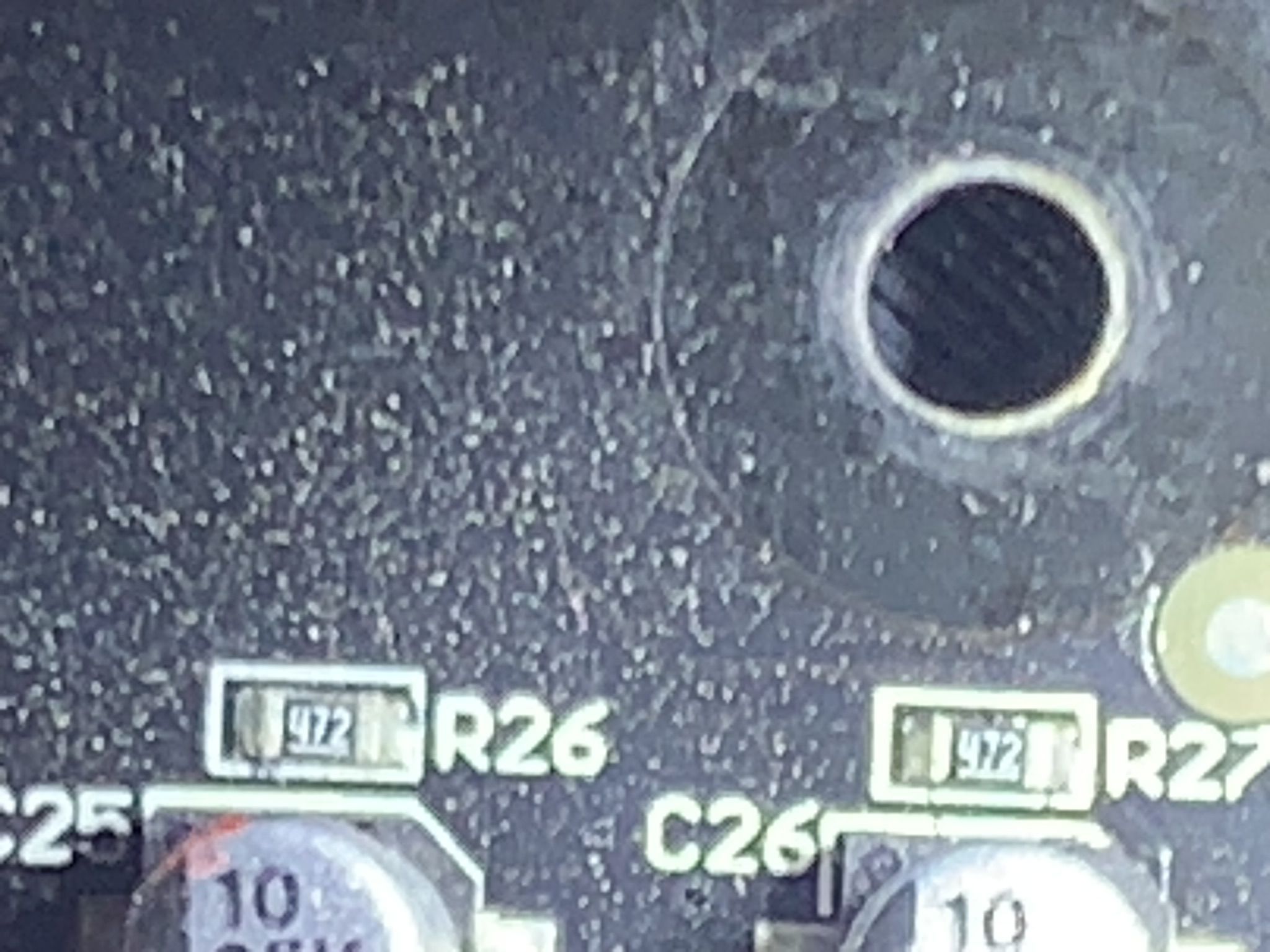
Salut @Fknust, Les valeurs de R26 et R27 semblent être de 4700 ohms. Autre point, Quitte à traduire ce que tu postes (cf ton autre message), penses à mettre la traduction en Français, tu augmenteras ta probabilité d'avoir une réponse.

-
Meilleurs vœux à tous. Bonne année 2024.
-
Excellent message @divers
-
Hello, L'affichage du résultat du palpage du plateau est une bonne idée. Malgré la mise à jour du firmware de ma CR-10 SE, je n'ai pas cet écran. Cet écran est également différent de celui de la CR-10 SE. Le titre de la fenêtre est différent et il n'y a pas le test de l'inertie de la tête d'impression. Du coup, pas de capteur d'inertie ? @PPAC superbe bonhomme de neige
-
[VTT] Support de porte bidon sous selle et porte bidon
Yo' en réponse au topic de Yo' dans Projets et impressions 3D
J'ai ce vélo. Sur le cadre grand format, il y a les inserts pour un porte bidon. Sur mon cadre 17 pouces, il n'y a pas d'insert. Je n'ai pas encore le niveau pour boire à la gourde sans m’arrêter

-
[VTT] Support de porte bidon sous selle et porte bidon
Yo' en réponse au topic de Yo' dans Projets et impressions 3D
Sur mon VTT non AE, j'ai deux plateaux de leur marque. j'en suis très content. Bon matos, qui coute son prix. -
[VTT] Support de porte bidon sous selle et porte bidon
Yo' en réponse au topic de Yo' dans Projets et impressions 3D
@Aezio effectivement, la gourde est souvent recouverte de poussière et de boue. Pour boire, je dévisse le haut de la gourde et je bois au goulot. Au moins c'est propre et le débit est plus intéressant -
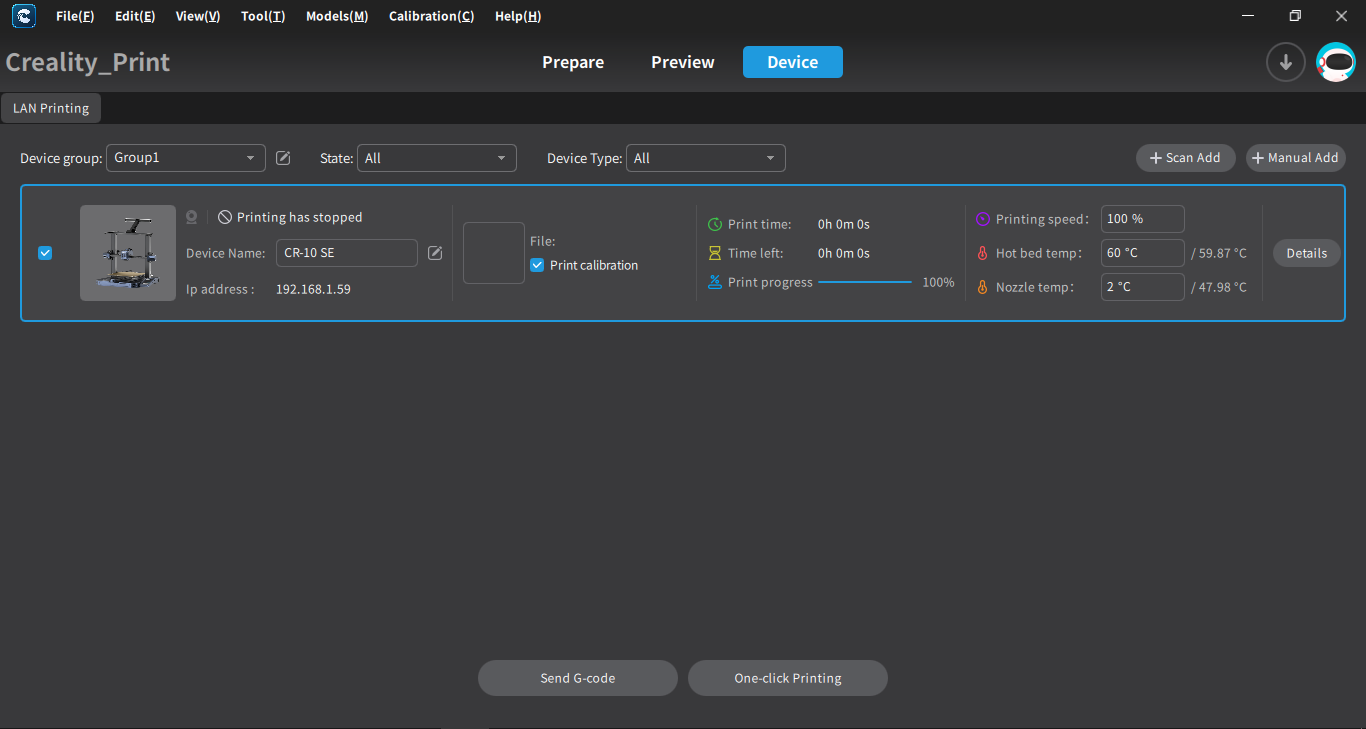
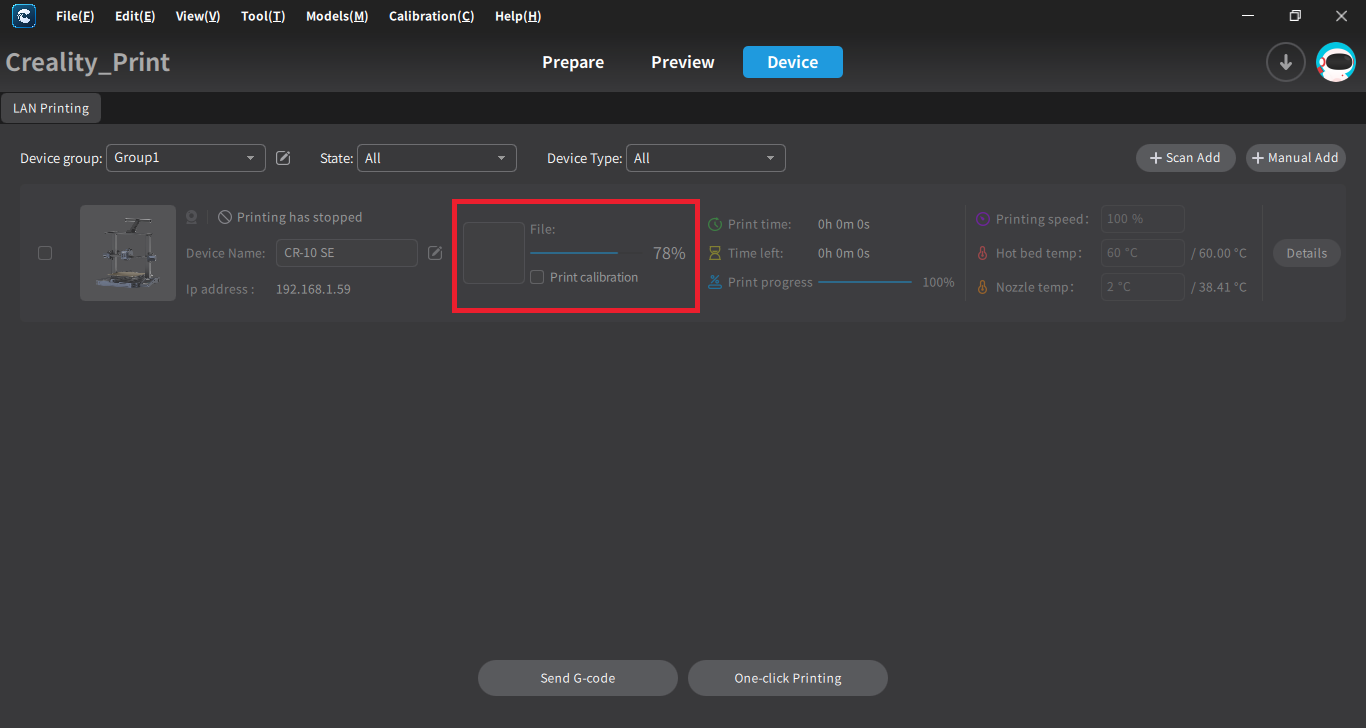
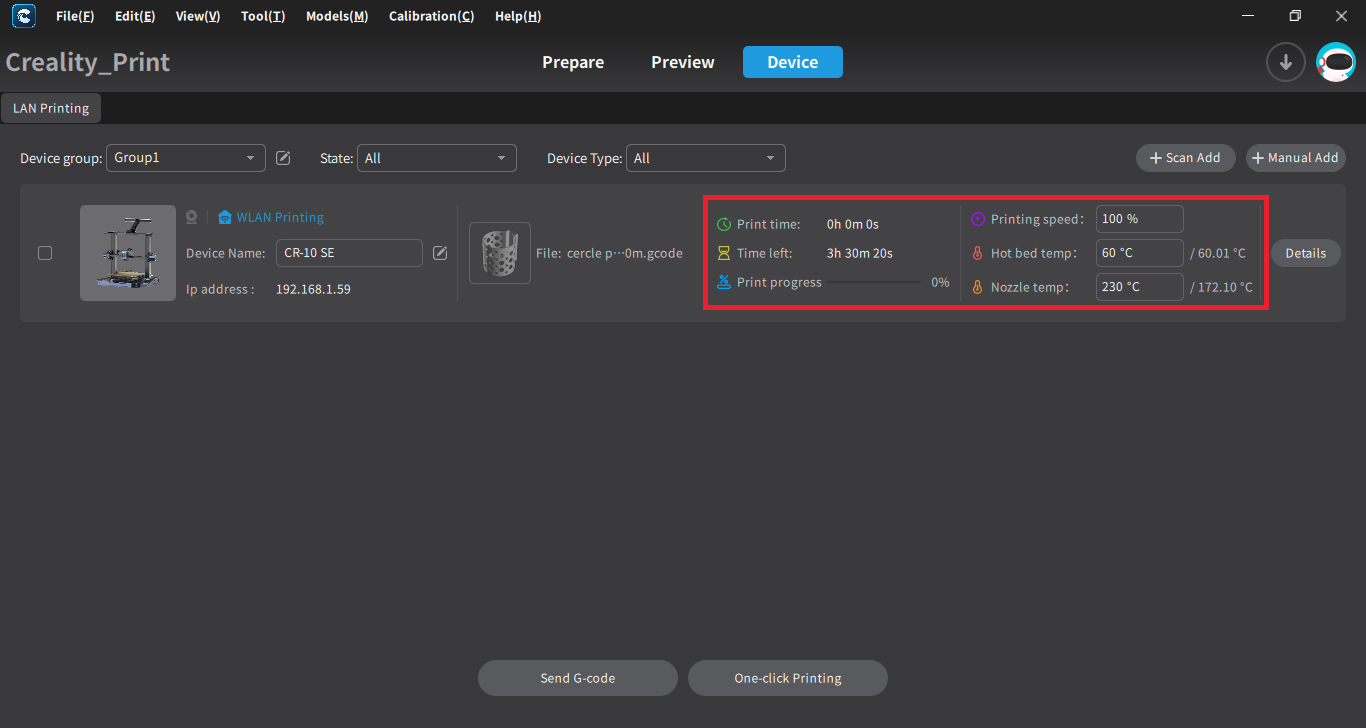
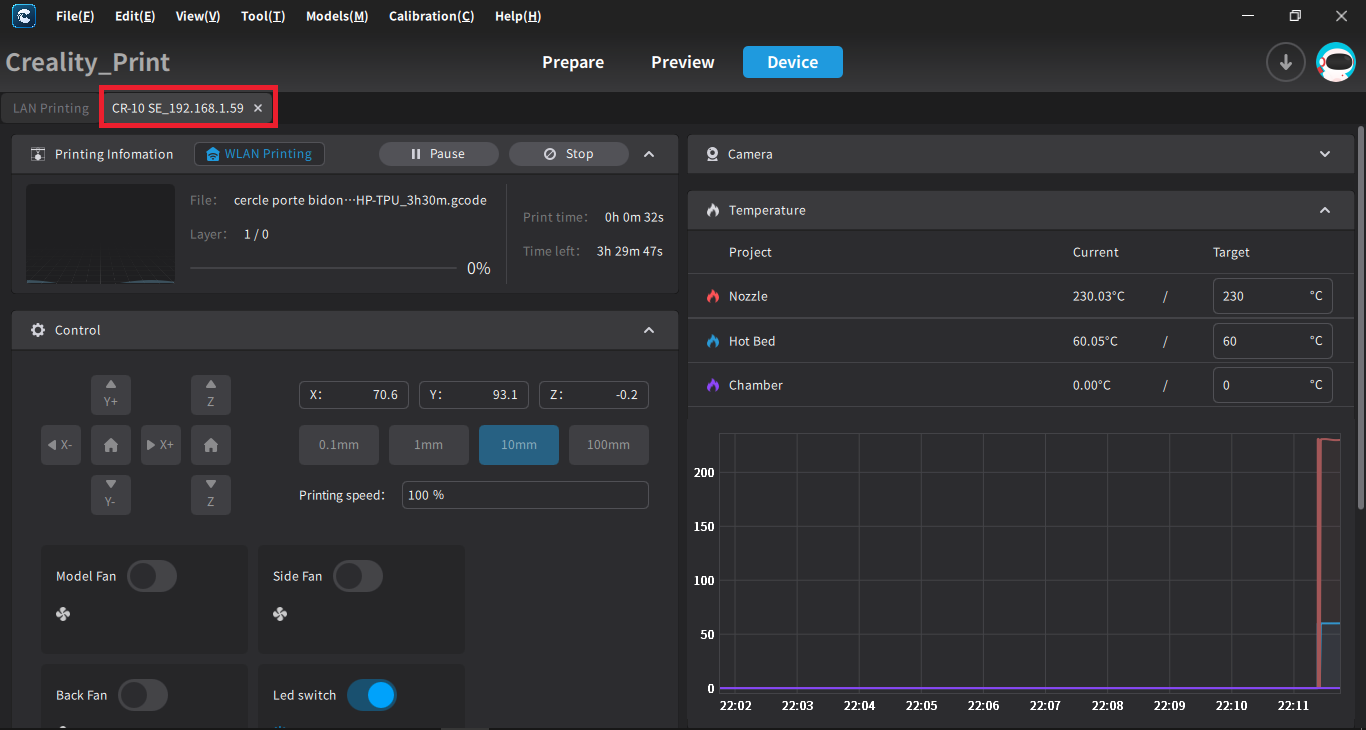
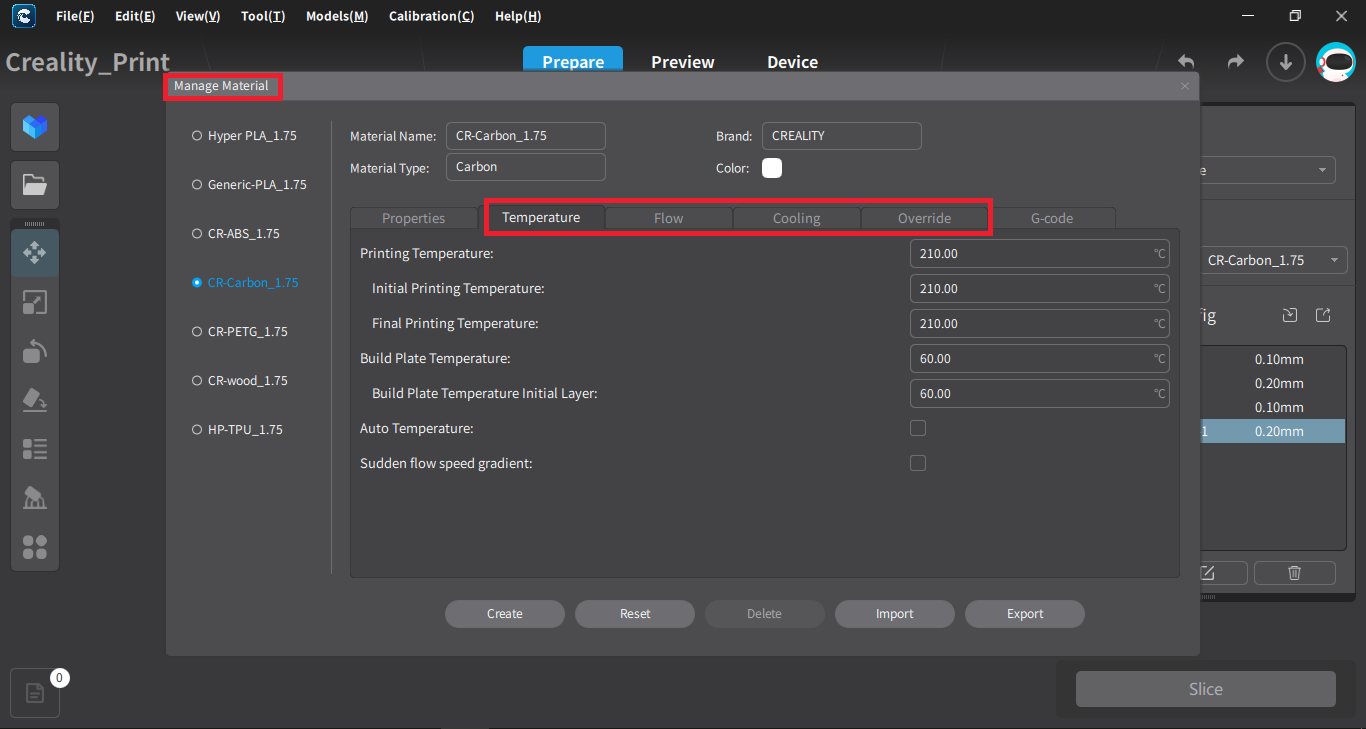
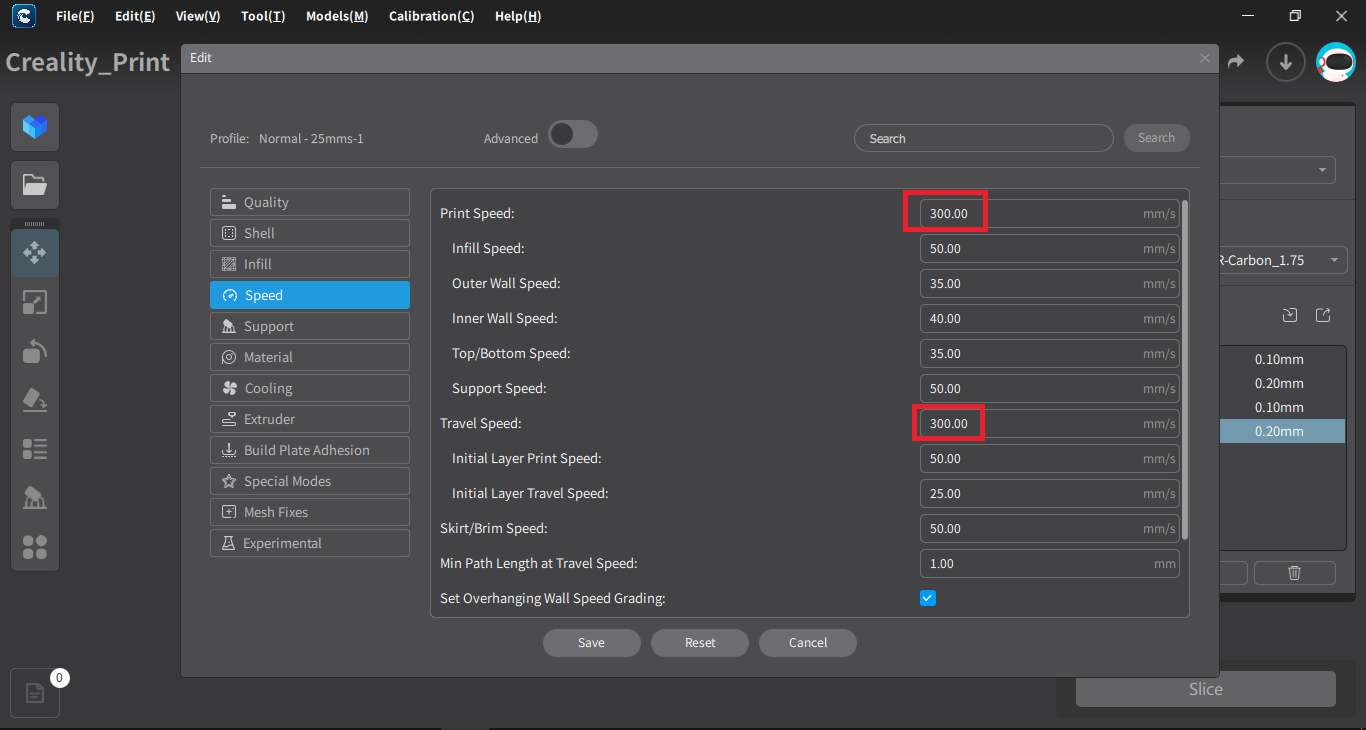
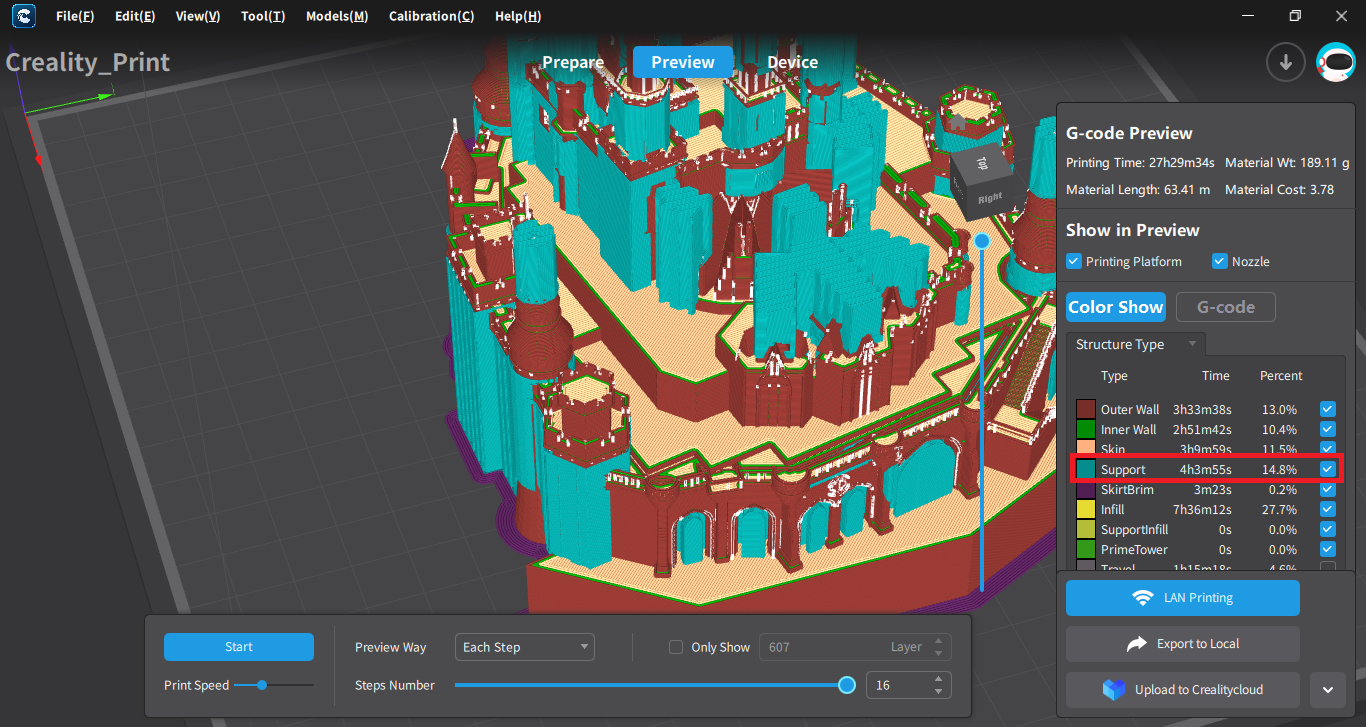
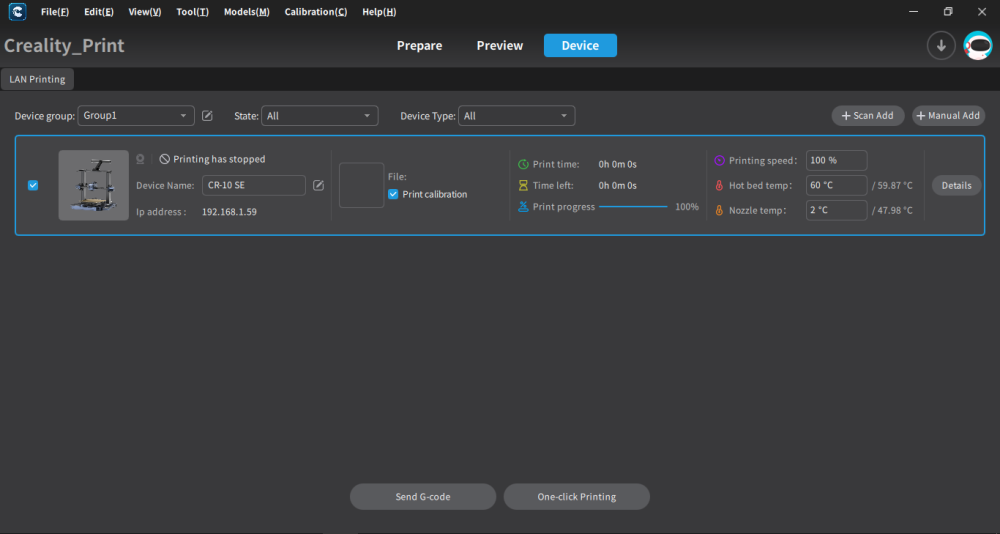
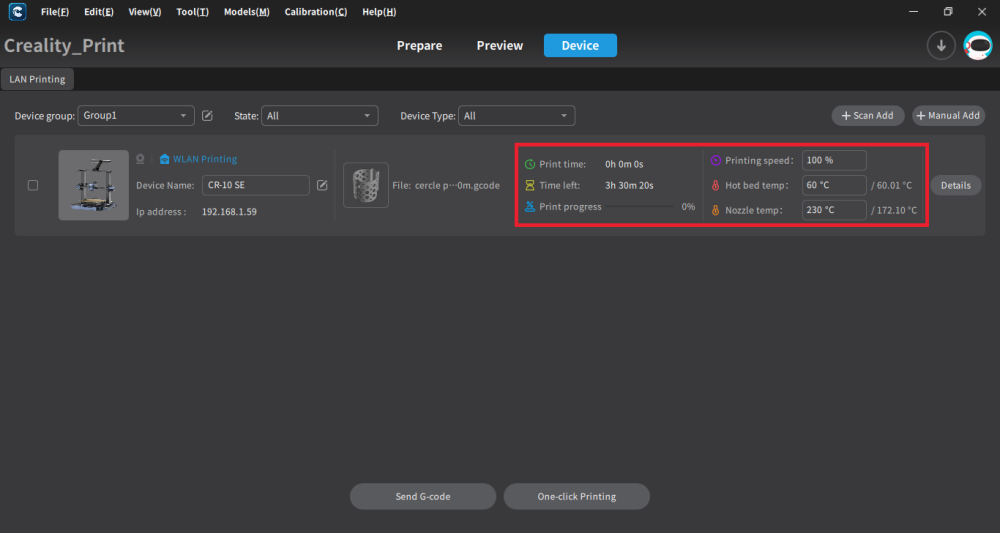
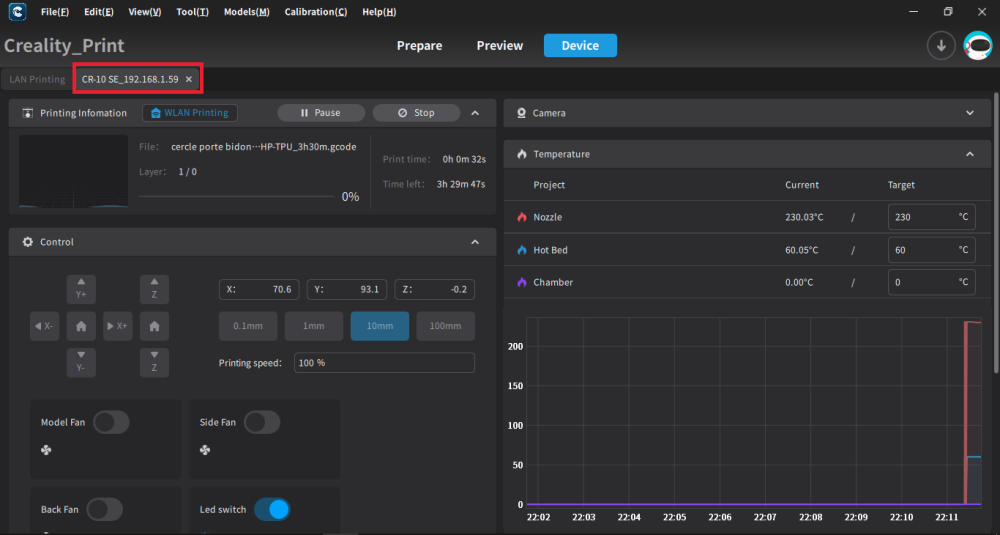
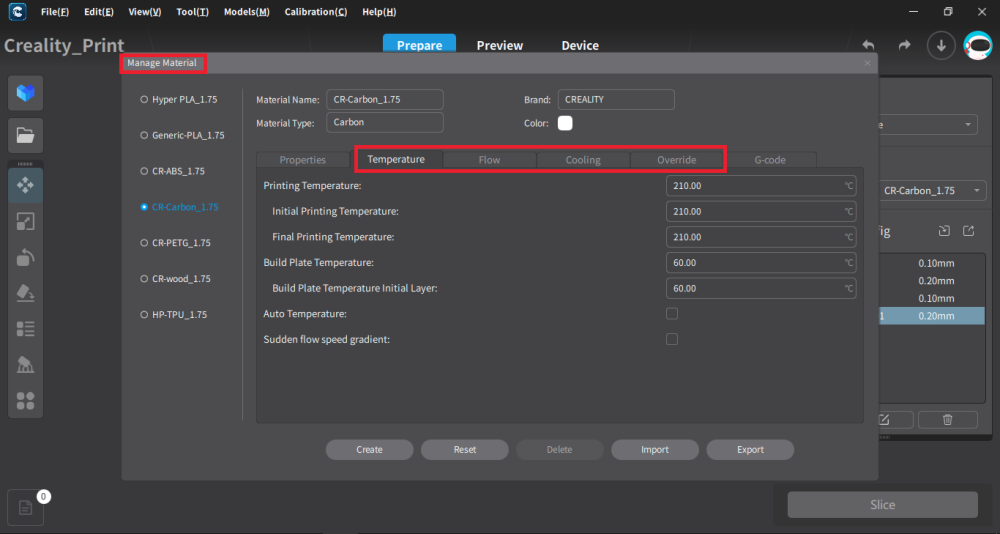
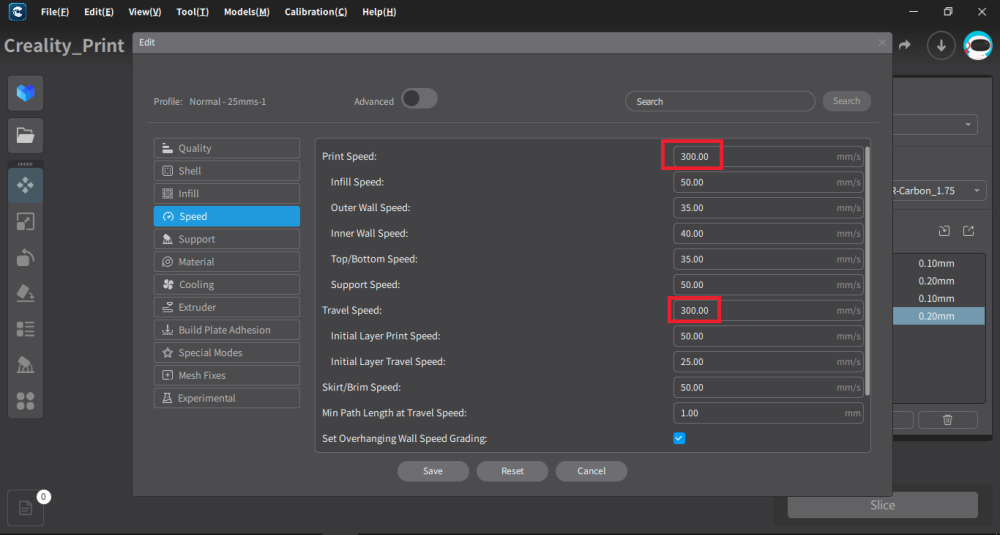
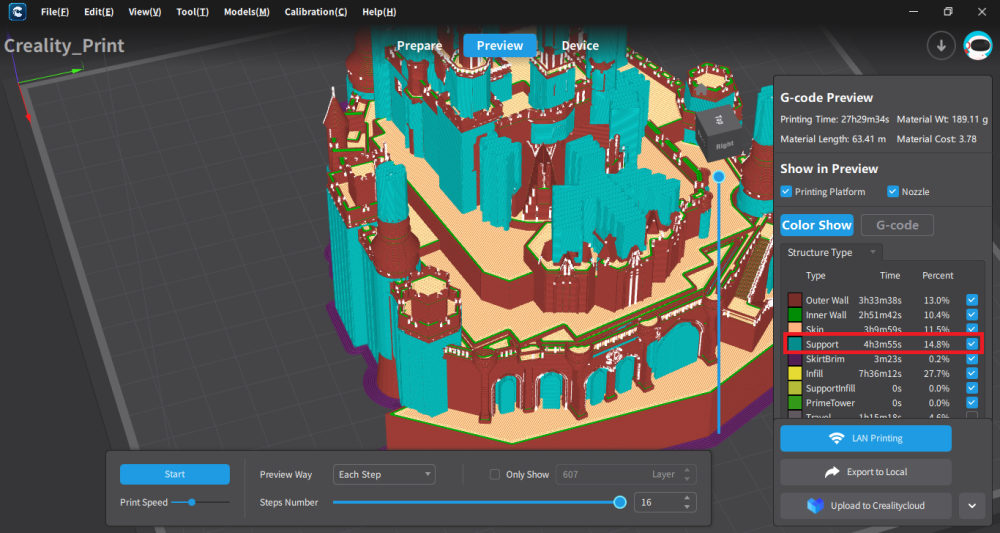
Hello, Voici quelques images supplémentaires de Creality Print. Il y a du très bien et du moins bien. En m'aventurant dans les diverses fonctionnalités, j'ai découvert le LAN printing qui est proposé à l'export du STL. En gros, on ajoute l'imprimante sois en scannant le réseau (qui n'a jamais fonctionné chez moi), soit en renseignant manuellement l'IP de l'imprimante (qui a fonctionné au bout de plusieurs tentatives). On coche l'imprimante, on clique sur "One-click Printing". Le fichier est transféré sur l'imprimante. L'impression se lance. En cliquant sur détails, on retrouve la page de Klipper accessible avec l'IP de l'imprimante. Cette fonctionnalité est top. Pour les curieux, la fonctionnalité de l'objet imprimé est visible su ce sujet ci dessous. Lors du test, j'ai lu que Creality Print est un dérivé de Creality Slicer lui même dérivé de CURA. Et là, je comprends mieux mon aversion pour les menus de réglages de Creality Print. Outre la complexité des réglages, faites attention à : 1) Des menus sont en double. Par exemple, la température, le débit et le refroidissement peuvent se configurer soit dans les réglages du filament, soit dans les réglages de la qualité d'impression. Me concernant, seuls les réglages dans le profil de la qualité d'impression ont été pris en compte. 2) Les profils liés à la qualité de l'impression sont dépendant du profil du filament. Je me suis créé un profil avec du 25 mm/s lorsque le filament choisi était du PLA, puis j'ai changé de profil de filament et je me suis retrouvé avec les valeurs par défaut. En espérant que Creality Print évolue rapidement (et dans le bon sens). Vu la quantité de réglages, vu que les filament ne sont jamais strictement les mêmes, vu que les propriétés des filaments changent avec le temps après leur ouverture. Combien de kg de filament et combien de tests faut-il pour peaufiner tous ces réglages ?

-
[VTT] Support de porte bidon sous selle et porte bidon
Yo' a posté un sujet dans Projets et impressions 3D
Hello, Il y a quelque temps, je suis passé au VTTAE et j'ai été étonné de voir qu'il n'y avait pas d'insert pour fixer un porte bidon. En fouillant sur mon site de vente par correspondance préféré, j'ai trouvé : Un support à scratch. Un support qui se fixe sous la selle. Mon projet de support s'est basé sur le second article avec pour but de le solidifier (cf commentaires) en le fixant sur deux points. Voici le STL.support de porte bidon sous selle.stl Imprimé en PLA recyclé en 0.2. ça fonctionnait très bien jusqu'à ce qu'un aléa de l'activité physique vienne à bout du porte bidon alors en place. Le second projet a été de faire un porte bidon plus solide avec un bridage du bidon pour ne pas le perdre. Voici les STL. barre porte bidon.stlcercle porte bidon.stl La barre est imprimée en PETG en 0.2. Le cerclage est imprimé en TPU en 0.2. Si vous l'imprimez, un retour est le bienvenu. Sportivement,






-
Salut @Xav51, D'un coté, il y a le trancheur qui prévoit tous les mouvements avec certaines règles (et notamment les vitesses et accélérations). De l'autre, il y a l'imprimante qui exécute ces mouvements en les bridant avec d'autres règles, pour ne pas dépasser les limites de l'imprimante. La différence se situe là. Il y a également les temps de chauffes et de calibration qui ne sont pas pris en compte.
-
Hello, Sujet updaté. C'est le dernier message d'entête dédié à cette découverte.
-
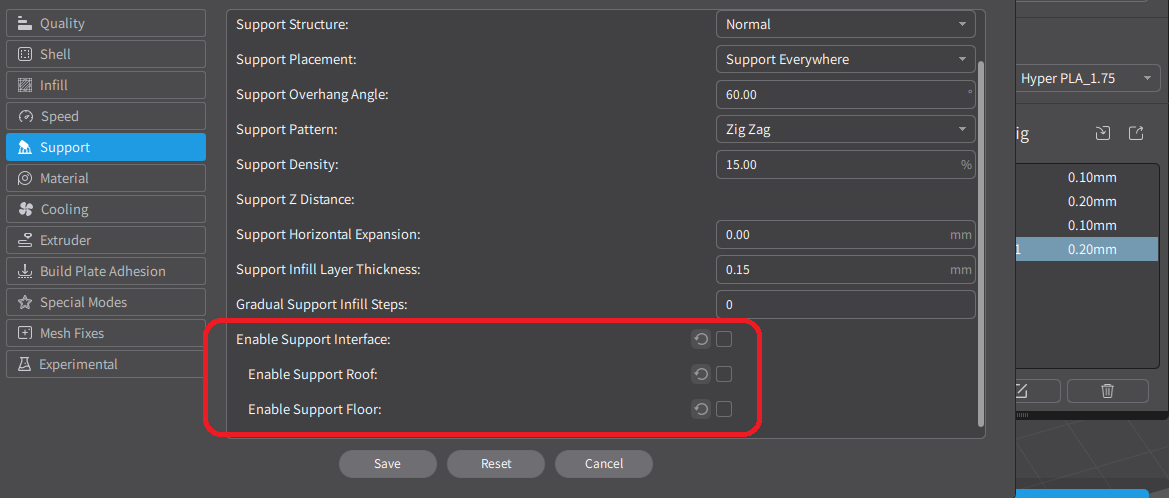
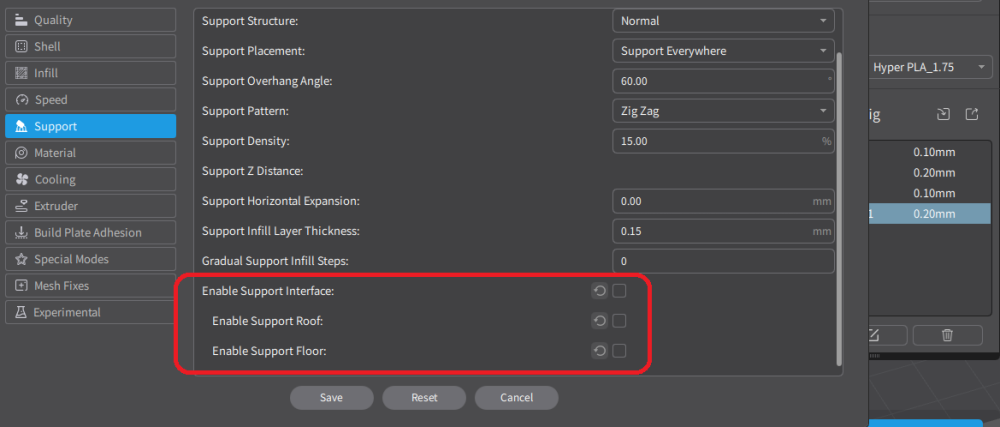
@pommeverte Merci pour la piste J'ai désactivé les options annexes liées aux supports. V'la le résultat.
-
Merci @PPAC pour ta réponse. Je vais recontrôler la tension les courroies. Pour le débit, j'ai l'impression qu'il est trop élevè avec ce filament. Le rainbow me donne de meilleures impressions. Je vais tenter la version remix. Merci pour le lien https://www.thingiverse.com/thing:127748 Trancheur : Creality Print, dernière version. Je pense que le trancheur s'est lâché sur les supports. J'en ai de partout. Quasiment chaque mur est recouvert par un support. Le post traitement ...
-
Hello, Sujet updaté
-
Entre 10 et 30 euros le kg de filament, ça fait entre 1450 € et 4350 € l'impression. A qui va s'adresser ce type de machine ? Durée du levelling ? 3 jours ?