Chercher dans la communauté
Résultats des étiquettes.
6 résultats trouvés
-
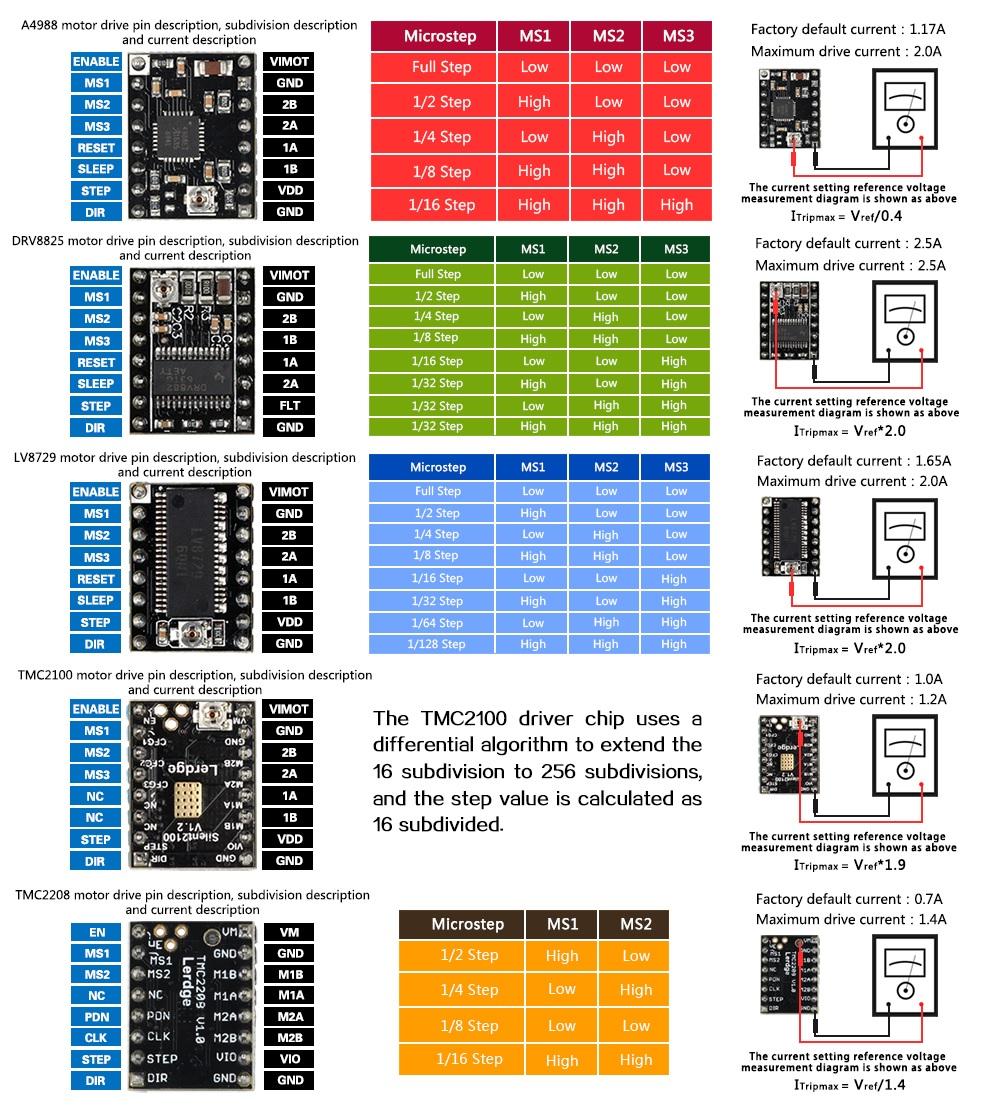
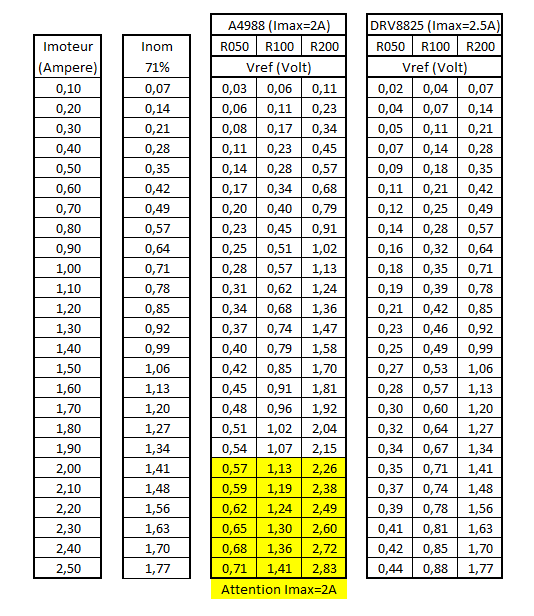
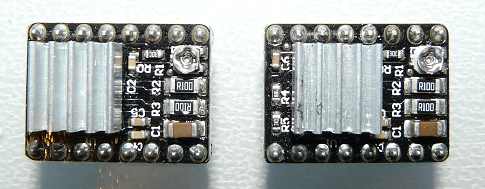
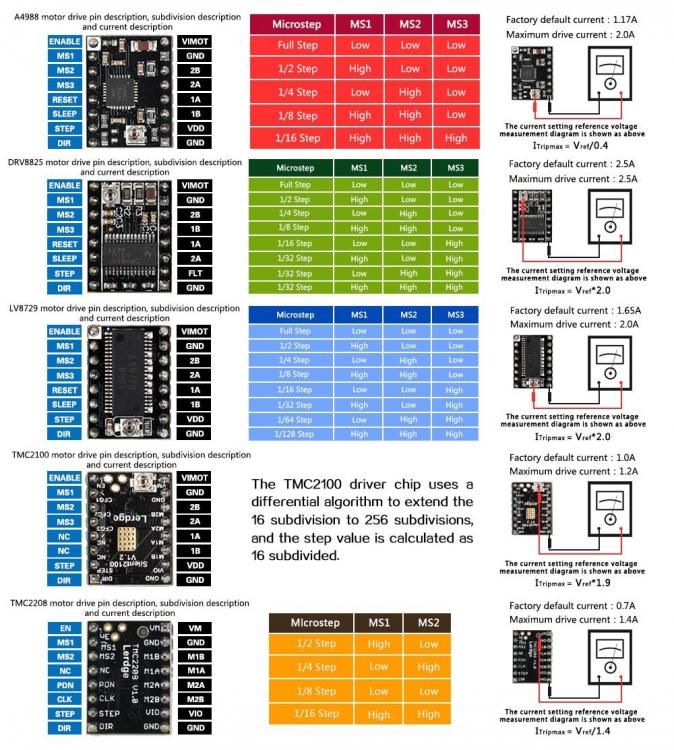
Bonjour à toutes et tous, J’entends souvent beaucoup de choses sur le réglage des drivers moteurs, bien souvent on me parle d’un réglage usine hypothétique, ou à l’oreille ou lors des nuits de pleine lune quand le vent souffle à l’ouest ! Je lis souvent « moi j’ai une Vref à 1.6V » et ça ne veut rien dire car il manque des informations capitales ! Le courant généré peut passer du simple au double ou même être hors limite si les modules ne sont pas strictement identiques ! Donc NON, le réglage de la tension de référence (Vref) sur un driver de moteur pas à pas ne se fait pas de manière empirique ! Il faut absolument connaitre plusieurs caractéristiques pour régler correctement ces bestioles. - Coté driver, le circuit utilisé A4988 ou DRV8825 a son importance et va surtout de pair avec la valeur des résistances « Rsense » qui sont présentent sur le PCB, elles-y sont souvent sérigraphiées « S1, S2, S1X, S2X, R1, R2…», et peuvent avoir comme valeur 0.05 ohm (Marquage R050), 0.1 ohm (R100) ou 0.2 ohm (R200) donc on sort la loupe pour être sûr. - Coté moteur, il faut chercher son courant de fonctionnement par phase (Imax) qui a été calculé par le fabriquant en fonction de ses caractéristiques. Si ce courant n’est pas indiqué par le vendeur du moteur, on cherche chez SON fabriquant avec SA référence dans son datasheet. Sous-alimenté, il va perdre son couple et risque même de vibrer sans pouvoir garder sa position stable. Suralimenté, il va faire beaucoup de bruit par résonance et bien entendu surchauffer (le driver également par contre réaction). Après une longue discussion avec un constructeur de moteur de type Nema (GE), il s'avère que le Imax d'un moteur n'est pas son Inominal, il faut donc diviser Imax par racine de 2 pour trouver Inom. j'ai donc mis à jour le tableau en correspondance. On calcule donc la valeur de Vref à régler avec le petit potentiomètre, la formule est donnée dans le datasheet du constructeur du driver, et est : on calcule Inom = Imax divisé par racine(2) Pour un A4988 : Inom = Vref / (8 * Rsense) donc Vref = Inom * 8 * Rsense Pour un DRV8825 : Inom = Vref / (5 * Rsense) donc Vref = Inom * 5 * Rsense La valeur maximale de la limitation de courant est donc définie en interne en fonction de la valeur des Rsense et de la tension de la broche Vref. Exemples de calculs : Un A4988 avec des Rsense de 0.05 ohm (Marquage R050) et un moteur avec un Imax à 1.8A, Inom = 1.27A : Vref = 1.27 * 8 * 0.05 = 0.51V. Un DRV8825 avec des Rsense de 0.1 ohm (Marquage R100) et un moteur avec un Imax à 2.1A, Inom = 1.48A : Vref = 1.48 * 5 * 0.1 = 0.74V. Un A4988 avec des Rsense de 0.2 ohm (Marquage R200) et un moteur avec un Imax à 1.5A, Inom = 1.06A : Vref = 1.06 * 8 * 0.2 = 1.7V. Important : Le courant maximum par phase pour un A4988 est de 2A et 2.5A pour le DRV8825. Donc si vous êtes dans la limite haute de votre drivers, réduisez un peu Imax. La température du driver peut monter à plus de 150°C si son courant arrive à son maximum admissible et il doit être de toute façon correctement refroidit par un dissipateur et si possible par un flux d’air au-delà de 1A par phase. Il passera en protection thermique et coupera le courant moteur si sa température arrive hors limite. Voir les datasheets pour les courageux, dont les tableaux « Relative Current and Step Directions » et « Step Sequencing Settings ». http://www.allegromicro.com/~/media/Files/Datasheets/A4988-Datasheet.pdf http://www.ti.com/lit/ds/symlink/drv8825.pdf Pour les TMC2xxx, il suffit de prendre Inom du tableau et de régler Vref à la même valeur. ex moteur 1.5A, Inom = 1.06A, Vref = 1.06V attention ceci n'est valable que pour Rsense = 110mΩ la formule donnée par Trinamic est IRMS = 325mV / (RSENSE + 20mΩ) * 1/√2 * VREF/2.5V avec des RSENSE = R110 = 110mΩ nous simplifions puisque 325/(110+20) = 2.5 (c'est pour ça que l'on trouve les pilotes avec ces valeurs de RSENSE sur le marché) IRMS = 2.5 * 1/√2 * VREF/2.5V 2.5 / 2.5 = 1 donc IRMS = 1/√2 * VREF je me débarrasse de 1/√2 en multipliant par √2 des deux cotés √2 * IRMS = √2 * 1/√2 * VREF donc √2 * IRMS = VREF VREF = √2 * IRMS et nous savons que IRMS = IMAX / √2 VREF = √2 * IMAX / √2 donc VREF = IMAX comme on prends 70% par sécurité, pour un courant de 1.5A, nous avons 1.5*0.7 = 1.05, réglage de VREF à 1.05V et ça tombais bien, puisque en prenant 70% de sécurité, c'est comme si on divisais par √2 (0.707...) c'est une astuce d'électronicien c'est comme si en prenant 70% de sécurité, on prenait la valeur RMS de ce courant IMAX pour simplifier, avec 70% de sécurité, IMAX * 0.707 = IMAX / √2 = IRMS donc on peut régler VREF à la valeur APPARENTE de IRMS, sous entendu que ça contient déjà les 70% de sécurité. mais ça ne fonctionne qu'avec des RSENSE à 110mΩ vous trouverez un XLS pour ces calculs, vous pouvez y changer Rsense si ça valeur n'est pas standard. ATTENTION les TMC sont hyper sensible à la température, ils doivent impérativement être refroidit sous un courant d'air, avec un dissipateur conséquent. Bonne lecture. Stef le tableau corrigé pour avoir une idée de Vref en fonction des valeurs d'Imax du moteur. TMC_Vref_V2.xlsx
- 193 réponses
-
- 14
-

-

-

-
Bonjour, Depuis presque 15 ans, j'ai ma fraiseuse 4 axes à la maison. La construction m'a pris un an car j'était pas pressé de dépenser tout d'un coup ( Environ 1000 € Broche et PC compris). Une présentation à l'époque : ICI. La CN était composée de LinuxCnc qui pilotait le port parallèle du PC pour piloter une carte : La MC433 (10A, mode 1/2 pas !!! ça c'est du demi milliion de microstepping ) et en mode unipolaire !!! (On a bien moins de couple dans ce mode): Et bien, elle en fait du copeau cette fraiseuse !!! Et elle était presque parfaite à mes yeux . Et la -> C'est le drame !! J'achète une imprimante 3D (Une U30 Alfawise) ... Pas super fiable donc je m'interesse à ces composants. Et alors la : Je découvre que l'offre de contrôleurs moteurs pas à pas a explosée , Il y en a pour tous les usages et remplacer ma MC433 devient possible à un coût très correct. Quand on a une imprimante et que l'on a l'habitude de partager les infos (les savoirs) on vient ICI. (Mon Ami @Antho.breizh m'en avait parlé) Et en papotant avec des pationnés de CN : @Titi78, @Jean-Claude Garnier, @Locouarn né l'envie de mettre à jour ma machine au niveau de l'électronique. Le boulot est en cours, la présentation suit :
-
Bonsoir, Je suis en recherche des composants pour mon imprimante XY reprap. Je m’interroge sur le choix de mes drivers, pour information mes composants sont : - - Une carte megatronic V3.3 - - 3 moteurs pas à pas nema 23hs30 : https://www.gotronic.fr/art-moteur-23hs30-2804s-18357.htm pour les axes X, y et z. J’ai vu sur le forum que les DRV8825 ne sont pas assez puissants pour les moteurs nema 23. Que me conseillerez-vous comme drivers ? Cordialement Fanfoi
-
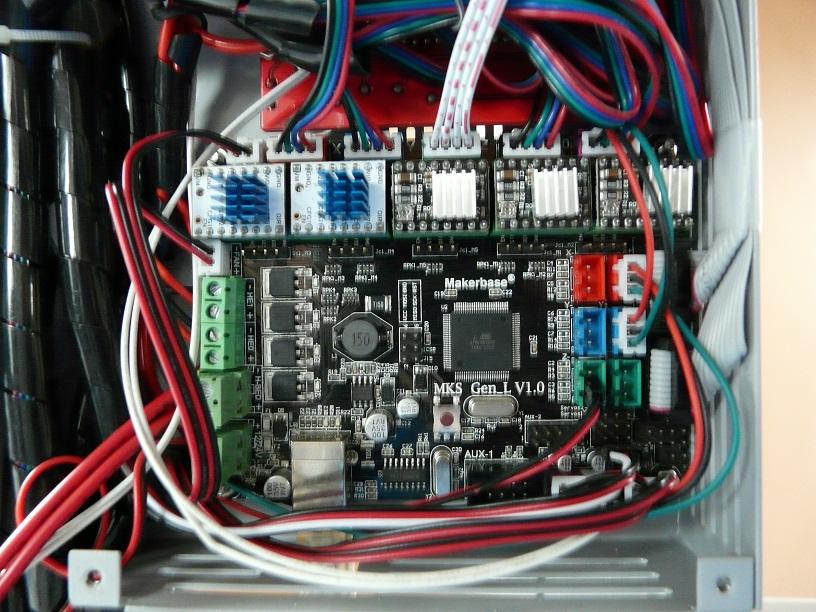
Salut ! Après avoir tester la Tornado, il apparait que si les DRV8825 sont nettement plus silencieux que les A4988, ils n'en restent pas moins audibles ... Je voulais aussi améliorer le rendu et je m'étais posé la question de mettre des smoothers. Tant qu'à ouvrir la bête, j'ai préféré remplacer les steppers DRV8825 par des TMC2100. Cela m'évite d'installer des smoothers. Je n'ai fait (pour l'instant) que les steppers X et Y qui sont ceux qui donnent le maximum de rendu. Le sujet a déjà été traité ailleurs dans ce forum, mais voici un rappel du montage de ces TMC2100. Les TMC2100 et les DRV8825 se montent dans le même sens, et donc dans le sens contraire du A4988. Cela a son importance si on ne veut pas tout cramer. J'ai prévu 2 séries de TMC2100 : - Les TMC2100 en StealthChop (configuration par défaut : zéro bruit mais couple plus faible), - Les TMC2100 en SpreadCycle (CFG1 soudé : silencieux et couple plus important). L'idée est de tester les TMC2100 de base et voir si il y a des pas qui sautent. Je suis parti sur l'idée que sur une CoreXY, les 2 moteurs servent au mouvement ... De base, les TMC2100 sont configurés à 0.47v, ce qui est très bas. Je les ai monté à 0.8v, comme lu sur beaucoup de tutoriels. J'ai constaté des pertes de pas (et cela s'entend à l'oreille par un bruit pas "souple"). J'ai ensuite mis les TMC2100 à 1.1v. Là, je n'ai constaté aucune perte de pas. J'en suis à mes premières impressions, donc l'avenir me dira si cela est stable. Je vous tiendrai au courant. Pour info, toutes les mesures (et donc réglages) doivent être fait avec les moteurs déconnectés (sur la carte mère dans mon cas). C'est dit ... Pour info, ces steppers chauffent beaucoup. En fonctionnement, un radiateur de DRV8825 est chaud, un radiateur de TMC2100 vous brûle. Le ventilateur de la carte-mère de la Tornado est donc le bienvenu. Bien entendu, soit on inverse la connectique au cul du moteur, soit on modifie le firmware pour inverser le sens du mouvement X et Y (les TMC2100 ont une logique inverse). Pour ma part, modification du firmware (configuration.h) : #define INVERT_X_DIR true (au lieu de false) #define INVERT_Y_DIR true (au lieu de false) #define INVERT_Z_DIR true Et on modifie les steps/mm, car le DRV8825 est en 1/32 alors que le TMC2100 est en 1/16 : Toujours dans configuration.h : #define DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, 1600, 188 } au lieu de { 160, 160, 1600, 188 } On peut aussi modifier ces paramètres dans l'interface de l'imprimante. Si on ne fait pas cette modification, 100mm demandés deviennent 200mm, et au premier AutoHome, la tête va s'exploser dans la barre du fond (vécu ...). Voici quelques photos de l'intérieur : Pour ceux qui veulent régler leur DRV8825 au petits oignons et qui n'ont pas de loupe : les DRV8825 sont en R100. J'ai imprimé quelques pièces de tests : le résultat est bluffant ! Aucun bruit des moteurs ... plus aucune vibration même lors de changement rapide de direction de la tête ... seul le ventilateur de la tête est audible (prochaine modif ) ! En gros, ces TMC2100 et le ventilateur de la tête changé = imprimante totalement silencieuse. Le résultat de l'impression est une nette amélioration de la qualité et du rendu. Je vous mettrai quelques photos plus tard. Verdict sur le TMC2100 : "must have" ("forcément nécessaire").
-
-
Bonjour la carte mère de mon imprimante 3D Anet A8 à griller (de ma faute à jouer avec le filament dans le moteur d'extrudeur, elle n'a pas aimé le retour de courant ....) du coup pour avoir moins de souci à l'avenir j'ai décidé d'acheter un kit RAMPS 1.4 avec des stepper drivers DRV8825. lors de mes premier test (pour confirmer que tout est bien installé (alim, USB, et 1 moteur pour tester chaque axe individuellement) je me rend compte que le moteur fait un bruit continue (plus ou moins aigue ) après chaque mouvement. le moteur se met alors à chauffer fortement et le DRV8825 aussi. il y a un réglage à faire concernant ça ? Cordialement.