supernono
-
Compteur de contenus
91 -
Inscrit(e) le
-
Dernière visite
Visiteurs récents du profil
1 616 visualisations du profil





Récompenses de supernono
")





-
 bonjour a tous je viens vous solliciter car j'ai deux problèmes avec mon imprimante : Tevo tornado transformée en IDEX marlin 2.0.8.2 (sur les conseils trouvé dans un sujet de @yopla31) carte mère Bigtreetech SKR PRO V1.2 (avec EEPROM sur le port I2C) et TFT35 V2 + LCD 12864 2 capteurs de fin de filament de type dual guard sensor de hotends.fr (casse et blocage du filament ) // The size of the printable area #define X_BED_SIZE 300 #define Y_BED_SIZE 290 // Travel limits (mm) after homing, corresponding to endstop positions. #define X_MIN_POS -88 //modif arnaud : -xx.x pour parking ? #define Y_MIN_POS 0 #define Z_MIN_POS 0 #define X_MAX_POS X_BED_SIZE #define Y_MAX_POS Y_BED_SIZE #define Z_MAX_POS 300 #define DUAL_X_CARRIAGE //modif : activation #if ENABLED(DUAL_X_CARRIAGE) //modif arnaud à regler #define X1_MIN_POS X_MIN_POS // Set to X_MIN_POS #define X1_MAX_POS X_BED_SIZE // Set a maximum so the first X-carriage can't hit the parked second X-carriage #define X2_MIN_POS 0 // Set a minimum to ensure the second X-carriage can't hit the parked first X-carriage #define X2_MAX_POS 387 // Set this to the distance between toolheads when both heads are homed #define X2_HOME_DIR 1 // Set to 1. The second X-carriage always homes to the maximum endstop position #define X2_HOME_POS X2_MAX_POS // Default X2 home position. Set to X2_MAX_POS. // This is the default power-up mode which can be later using M605. #define DEFAULT_DUAL_X_CARRIAGE_MODE DXC_AUTO_PARK_MODE // Default x offset in duplication mode (typically set to half print bed width) #define DEFAULT_DUPLICATION_X_OFFSET 150 #define FILAMENT_RUNOUT_SCRIPT "M600 T%c" #define NOZZLE_PARK_POINT { (X1_MIN_POS), (Y_MIN_POS + 5), 10 } constatations : en mode DUPLICATION et en mode MIROIR en cas de déclenchement d'un des capteurs de filament les 2 têtes se parquent bien chacune de leurs coté mais le changement de filament ne se fait toujours que sur la tête gauche (E0 / T0) et le TFT me met un message "runout sensor T0" quelque soit le capteur déclenché en mode AUTO_PARK_MODE en cas de déclenchement du capteur de filament gauche (E0 / T0) tout se passe bien la tête se parque a gauche et le TFT met un message "runout sensor T0" et le changement de filament se fait bien en cas de déclenchement du capteur de filament droit (E1 / T1) là ça se passe moins, bien la tête de droite vient a gauche en collision avec la tête gauche le TFT met un message "runout sensor T1" et le changement de filament se fait bien hypothèses : en mode DUPLICATION et en mode MIROIR dans ces 2 modes la tête de droite est la recopie de la tête de gauche, { décalée de la valeur de l'offset X (150 dans ce cas) pour la duplication et décalée de la valeur de l'offset X (300 dans ce cas envoyé par un M605) moins la valeur de la tête gauche pour la copie miroir } il semblerais que MARLIN ne reconnais que le tandem E0 /T0 et ignore le tandem E1 /T1 ça semble être confirmé car si la ligne #define DISABLE_INACTIVE_EXTRUDER est décommentée l'extrudeur droit ne fonctionne pas en mode DUPLICATION et en mode MIROIR j'ai regarder les fichiers M600.cpp et runout.cpp mais je n'ai pas tout compris !! en mode AUTO_PARK_MODE les 2 capteurs sont bien reconnus et exploités donc ça m'écarte les défaut de câblage ou de définitions dans marlin la collision me semble "normale" car : #define NOZZLE_PARK_POINT { (X1_MIN_POS), (Y_MIN_POS + 5), 10 } donc quelque soit le capteur de filament qui déclenche, la tête (gauche ou droite) ira au mêmes coordonnées donc collision une solution a ce problème de collision serait #define NOZZLE_PARK_POINT { (X_BED_SIZE / 4), (Y_MIN_POS + 5), 10 } pour être dans une position safe quel que soit le mode utilisé, mais je préfèrerais faire les changement de filament au dessus des bassin de purge (bien que ça ne soit pas si grave !) si vous avez des idées
bonjour a tous je viens vous solliciter car j'ai deux problèmes avec mon imprimante : Tevo tornado transformée en IDEX marlin 2.0.8.2 (sur les conseils trouvé dans un sujet de @yopla31) carte mère Bigtreetech SKR PRO V1.2 (avec EEPROM sur le port I2C) et TFT35 V2 + LCD 12864 2 capteurs de fin de filament de type dual guard sensor de hotends.fr (casse et blocage du filament ) // The size of the printable area #define X_BED_SIZE 300 #define Y_BED_SIZE 290 // Travel limits (mm) after homing, corresponding to endstop positions. #define X_MIN_POS -88 //modif arnaud : -xx.x pour parking ? #define Y_MIN_POS 0 #define Z_MIN_POS 0 #define X_MAX_POS X_BED_SIZE #define Y_MAX_POS Y_BED_SIZE #define Z_MAX_POS 300 #define DUAL_X_CARRIAGE //modif : activation #if ENABLED(DUAL_X_CARRIAGE) //modif arnaud à regler #define X1_MIN_POS X_MIN_POS // Set to X_MIN_POS #define X1_MAX_POS X_BED_SIZE // Set a maximum so the first X-carriage can't hit the parked second X-carriage #define X2_MIN_POS 0 // Set a minimum to ensure the second X-carriage can't hit the parked first X-carriage #define X2_MAX_POS 387 // Set this to the distance between toolheads when both heads are homed #define X2_HOME_DIR 1 // Set to 1. The second X-carriage always homes to the maximum endstop position #define X2_HOME_POS X2_MAX_POS // Default X2 home position. Set to X2_MAX_POS. // This is the default power-up mode which can be later using M605. #define DEFAULT_DUAL_X_CARRIAGE_MODE DXC_AUTO_PARK_MODE // Default x offset in duplication mode (typically set to half print bed width) #define DEFAULT_DUPLICATION_X_OFFSET 150 #define FILAMENT_RUNOUT_SCRIPT "M600 T%c" #define NOZZLE_PARK_POINT { (X1_MIN_POS), (Y_MIN_POS + 5), 10 } constatations : en mode DUPLICATION et en mode MIROIR en cas de déclenchement d'un des capteurs de filament les 2 têtes se parquent bien chacune de leurs coté mais le changement de filament ne se fait toujours que sur la tête gauche (E0 / T0) et le TFT me met un message "runout sensor T0" quelque soit le capteur déclenché en mode AUTO_PARK_MODE en cas de déclenchement du capteur de filament gauche (E0 / T0) tout se passe bien la tête se parque a gauche et le TFT met un message "runout sensor T0" et le changement de filament se fait bien en cas de déclenchement du capteur de filament droit (E1 / T1) là ça se passe moins, bien la tête de droite vient a gauche en collision avec la tête gauche le TFT met un message "runout sensor T1" et le changement de filament se fait bien hypothèses : en mode DUPLICATION et en mode MIROIR dans ces 2 modes la tête de droite est la recopie de la tête de gauche, { décalée de la valeur de l'offset X (150 dans ce cas) pour la duplication et décalée de la valeur de l'offset X (300 dans ce cas envoyé par un M605) moins la valeur de la tête gauche pour la copie miroir } il semblerais que MARLIN ne reconnais que le tandem E0 /T0 et ignore le tandem E1 /T1 ça semble être confirmé car si la ligne #define DISABLE_INACTIVE_EXTRUDER est décommentée l'extrudeur droit ne fonctionne pas en mode DUPLICATION et en mode MIROIR j'ai regarder les fichiers M600.cpp et runout.cpp mais je n'ai pas tout compris !! en mode AUTO_PARK_MODE les 2 capteurs sont bien reconnus et exploités donc ça m'écarte les défaut de câblage ou de définitions dans marlin la collision me semble "normale" car : #define NOZZLE_PARK_POINT { (X1_MIN_POS), (Y_MIN_POS + 5), 10 } donc quelque soit le capteur de filament qui déclenche, la tête (gauche ou droite) ira au mêmes coordonnées donc collision une solution a ce problème de collision serait #define NOZZLE_PARK_POINT { (X_BED_SIZE / 4), (Y_MIN_POS + 5), 10 } pour être dans une position safe quel que soit le mode utilisé, mais je préfèrerais faire les changement de filament au dessus des bassin de purge (bien que ça ne soit pas si grave !) si vous avez des idées -
Ma première imprimante vient de vivre 5min ...
supernono en réponse au topic de Tinbawa dans Discussions sur les imprimantes 3D
super ce forum : je dis que je ne comprend pas comment ça peut fonctionner et on me répond que le problème est entre la chaise et le clavier ???? je me fait traiter de troll et en plus on me menace (de carton rouge ? de bannissement ?) on sent bien la toute puissance du modérateur je ne pense pas avoir pousser quelque bouchon que se soit, j'ai juste chercher a comprendre et de préférence en français tu me semble bien aigri car tu n'a pas été capable de le faire hormis avec un bout de code sans explications sur github et une vidéo même pas en français, en gros tu ne m'a rien expliqué et tu m'a laisser me démerder contrairement a PPAC qui à pris le temps de me faire une réponse claire et compréhensible qu'il en soit remercié une nouvelle fois faut pas être embêté @PPAC pour ma part il n'y a pas de tension (malgré les risques encourus) -
Ma première imprimante vient de vivre 5min ...
supernono en réponse au topic de Tinbawa dans Discussions sur les imprimantes 3D
oui @fran6pj'ai réellement regarder la vidéo et je l'ai même ouvert sur youtube pour pouvoir lire la description donnée par Chris Riley c'est d'ailleurs là que j'ai vu que c'était un doubleur de sortie parallèle après il y a des personne qui savent faire preuve de pédagogie pour explique les choses et des personne qui prennent les autres de haut la preuve : en 5 ligne PPAC a su m'expliquer le principe et le pire c'est que j'ai compris le troll te salut bien -
Ma première imprimante vient de vivre 5min ...
supernono en réponse au topic de Tinbawa dans Discussions sur les imprimantes 3D
ok je comprend merci @PPAC mais dans ce cas le courant des 2 moteurs se trouve réduit donc il faut trouver le bon équilibre entre suffisamment de perte de couple pour un des moteur tout en en conservant assez pour bouger le deuxième + une butée mécanique même a courant réduit ça reste une méthode barbare et complètement anti mécanique @fran6p je n'ai jamais dit que ça ne fonctionnais pas j'ai juste dit que je ne comprenais pas comment ça pouvais fonctionner !! maintenant c'est plus clair suite aux explication de PPAC -
Ma première imprimante vient de vivre 5min ...
supernono en réponse au topic de Tinbawa dans Discussions sur les imprimantes 3D
@fran6poui j'ai bien suivi le lien et regarder la vidéo qui est cachée et qui démarre a 13.39 a part brancher un doubleur de sortie parallèle je ne vois pas ou il déclare ces 2 moteurs sur un seul pilote ni comment le driver pourrait choisir quel moteur il actionne je ne comprend vraiment pas comment tu peux faire tourner 2 moteurs d'un nombre de pas différents sur un seul driver ? (je dois être trop con pour comprendre !!!) ou bien on ne parle pas de la même chose -
Ma première imprimante vient de vivre 5min ...
supernono en réponse au topic de Tinbawa dans Discussions sur les imprimantes 3D
là je ne vois absolument pas comment cela peut fonctionner : 2 moteurs sur un même pilote se déplacent simultanément du même nombre de pas partant de là je ne vois pas comment un réglage du plateau ou du portique peut être possible (à moins de se servir d'une butée mécanique de référence et de faire volontairement sauter des pas a l'un des 2 moteurs . c'est quand même une méthode de bourrin !!!) de plus je n'ai pas trouver cette option pour 1 pilote dans la dernière version de Marlin, ça ne fonctionne qu'a partir de 2 pilotes pour un réglage du portique il faut 2 moteurs sur 2 drivers et pour un réglage du plateau on passe a 3 moteurs et 3 drivers c'est même pour ce type d'application que l'on commence a trouver des cartes mères à 6 ou 8 drivers . exemples : BTT SKR PRO v1.1 & v1.2 -> 6 drivers BTT Octopus v1.1 -> 8 drivers BTT GTR V1.0 & M5 V1.0 -> 11 drivers -
marlin Tevo Tornado Custom à retaper
supernono en réponse au topic de pinfomatique dans Paramétrer et contrôler son imprimante 3D
historiquement les "vertes" avaient d'origine une carte mère MKS base 1.5 ou 1.6 et un bed rouge ou vert les "V2"sont sorties couleur gold et CM MKS Gen_L la mienne est passer a une CM MKS SGen_L (32 bits) il y a 2 ans avec l'avantage de piloter les TMC2208 & TMC2209 en uart et de régler le courant moteur depuis l'écran depuis elle à pris 10cm en largeur récemment, 2 tête de CR10 V2 et une CM BigTreeTech SKR pro 1.2 !!! c'est une bonne imprimante qui date un peut mais qui fonctionne bien -
@yopla31je te comprend pour marlin et la susceptibilité de ses "héros", pour avoir lu quelques "issues & pull request" je les trouves très hautains dans leurs réponses parfois et je ne comprend pas cette obsession a ajouter de nouvelles fonctionnalités alors que des problèmes subsistent sur des fonctionnalités antérieurs enfin ce n'est pas ma façon de programmer quand je m'y met merci pour le lien de l'autre post mais je l'avais déjà lu et il m'a bien servi notamment à ne pas m'acharner avec la V 2.0.9.1 et a downgrader en V 2.0.8.2 sur la SKR PRO V1.2 qui marche pas trop mal ma foi j'ai pu tester le bi color / bi matière, la duplication et le symétrique et ça sort pas trop mal et de plus je n'ai, apparemment, plus de collision de tête bonne fin de vacance a toi
-
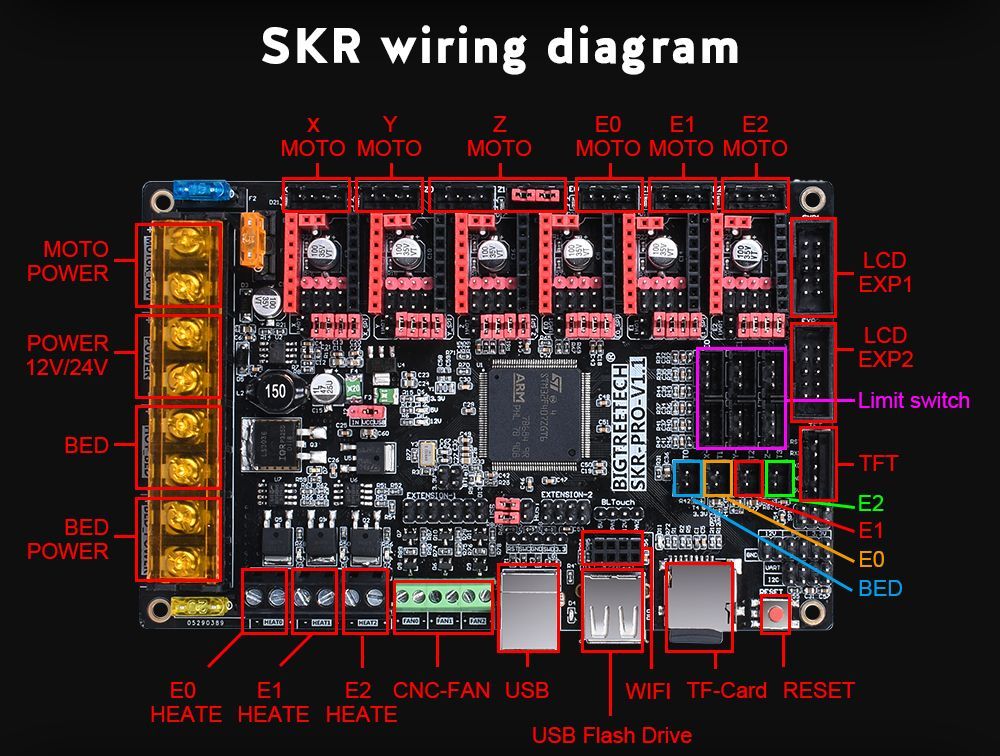
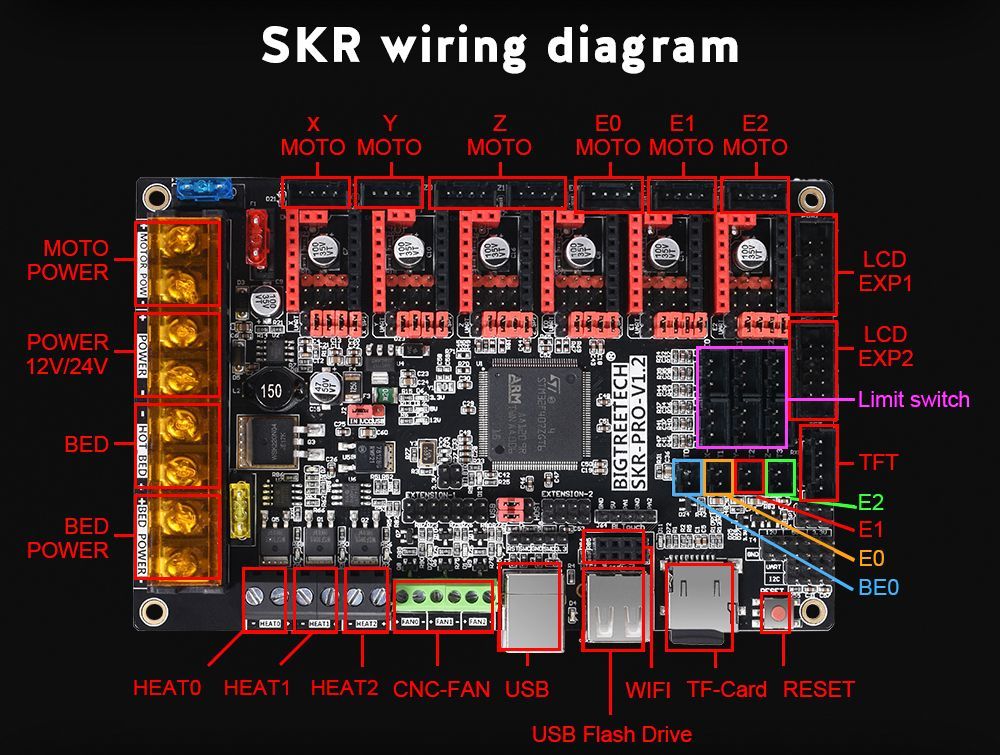
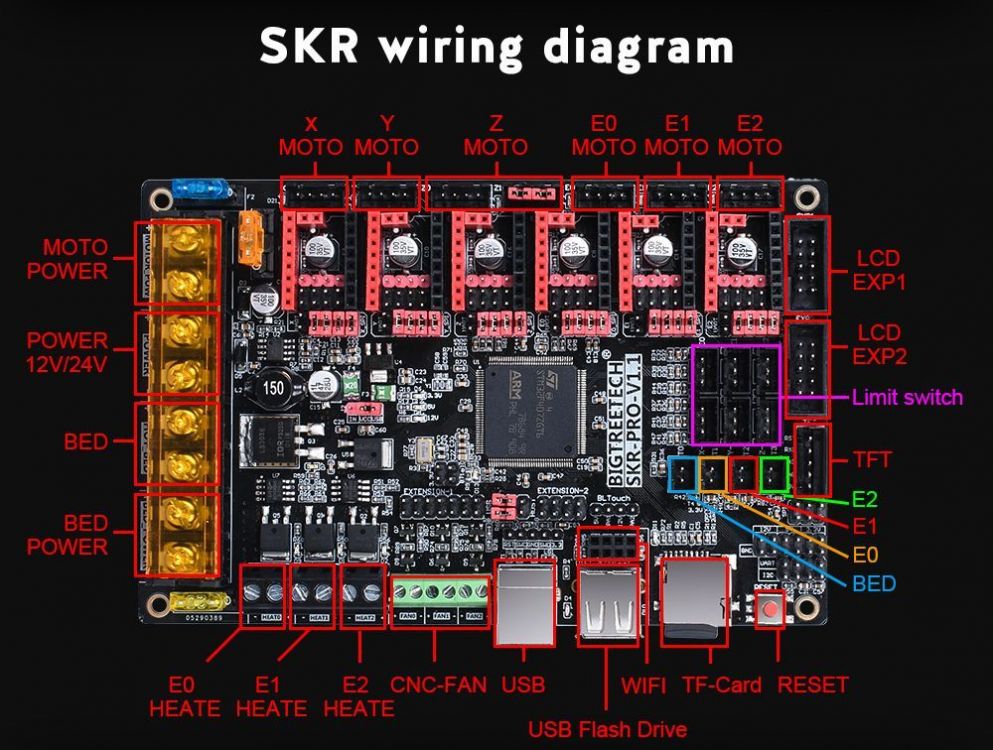
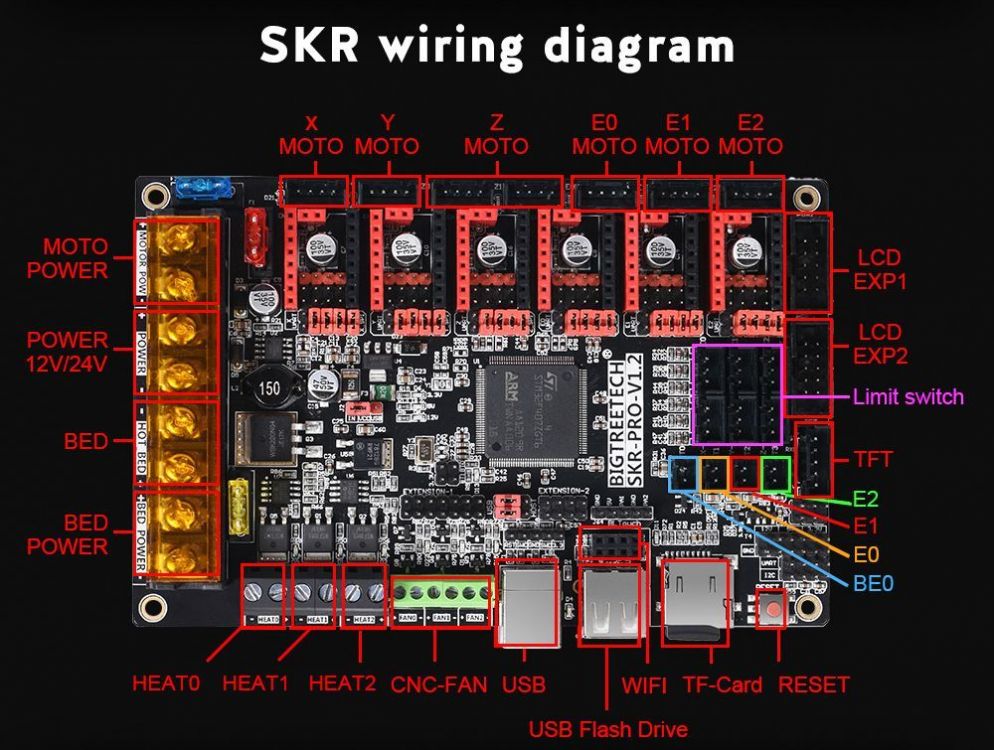
Salut @yopla31 je suis moi aussi en cours de conversion de ma Tevo Tornado en IDEX donc ce sujet m'intéresse particulièrement coté mécanique j'ai élargi le le châssis de la tornado à 50cm et créé une traverse X sur rail linéaire avec un stepper de chaque coté et 2 tête de cr10 V2 (les bleues en plastique) dont @fran6pm'avait donné les dimensions quand j'était un cours de réflexion sur le projet coté électronique j'ai une BTT skr pro V1.2, un écran BTT TFT35 E3 V3 (hybride tft / lcd 12864) 4 TMC2209 pour les Axes et 2 TMC 2208 pour les extrudeurs (moteur pancake + BMG triangle labs) et les 6 sont en UART j'ai aussi ajouter une EEPROM externe sur le connecteur I2C de la skr PRO (a coté du bouton reset) et le fonctionnement est OK a condition de faire 2 modifs dans le fichier " pins_BTT_SKR_PRO_common.h " de marlin 1°/ commentez les 2 define si dessous : 38 // Use one of these or SDCard-based Emulation will be used 39 #if NO_EEPROM_SELECTED 40 //#define SRAM_EEPROM_EMULATION // Use BackSRAM-based EEPROM emulation 41 //#define FLASH_EEPROM_EMULATION // Use Flash-based EEPROM emulation// modif arnaud pour utilisation eeprom 24c xx 42 #endif 2°/ ajoutez les lignes suivantes et décommentez un des 4 define proposé en fonction de l'EEPROM que vous installez, j'ai installé une AT24c256 43 44 #define I2C_EEPROM 45 #ifdef MARLIN_EEPROM_SIZE 46 #undef MARLIN_EEPROM_SIZE 47 #endif 48 // uncomment the size of EEPROM you are using. 49 #define MARLIN_EEPROM_SIZE 0x7FFF // EEPROM end address AT24C256 (32kB) 50 //#define MARLIN_EEPROM_SIZE 0x3FFF // EEPROM end address AT24C128 (16kB) 51 //#define MARLIN_EEPROM_SIZE 0x1FFF // EEPROM end address AT24C64 (8kB) 52 //#define MARLIN_EEPROM_SIZE 0x0FFF // EEPROM end address AT24C32 (4kB) 53 je n'ai rien inventé pour la mise en place de l'EEPROM mais j'ai trouvé des info pour le faire sur une SKR V1.4 ici et j'ai transposé a la SKR PRO V1.2 maintenant le différences entre V1.1 & V1.2 au jeu des 7 erreurs j'ai trouvé 1° le fusible (jaune) du bed a été déplacé 2° il y a une pin de plus sur le connecteur du BLtouch 3° un fusible vert soudé sous l'emplacement driver X a droite du condensateur est devenu noir sur la V1.2 4° un composant a été ajouter sous l'emplacement driver Y il y en a surement d'autre mais je ne les ai pas vue je ne pense pas qu'au niveau du fonctionnement ça change grand chose (mais ce n'est que mon avis je n'ais pas trouvé le schéma de la V1.2 voila pour le moment
-
un lien pour les galets en UHMWPE ?
-
marlin marlin 2.0.7.2 léger soucis chargement / déchargement filament
supernono en réponse au topic de supernono dans Paramétrer et contrôler son imprimante 3D
personne pour me confirmer si c'est normal ou pas ?? -
bonjour à tous imprimante tevo tornado ; carte mère MKS SgenL 32bits je viens de passer de marlin 2.0.5.3 à marlin 2.0.7.2 et depuis j'ai un petit souci de chargement / déchargement filament à la première impression : procédure: j'allume l'imprimante, je lance le préchauffage, je charge un filament + purge, je fais un homming et je lance une impression (comme j'ai toujours fait) et là l'imprimante me demande un changement de filament que je ne peux qu'accepter j'ai contrôlé le gcode : pas de M600 ni M701 ni M702 présent dans le code est ce que j'aurais activé une option par mégarde ? ou est ce une nouvelle fonctionnalité de marlin ? cela ne ce produit qu'au lancement de la première impression après la mise sous tension, si je relance une impression (même pièce ou différente) à la suite de la première tout ce passe normalement j'ai fait plein de test , ça ne se produit toujours qu'a la 1ère impression après mise sous tension si vous avez une idée, je prend !!!
-
bonjour a tous je recherche un boitier de contrôle de cr10 (vide de préférence) si l'un d'entre vous a transformé sa cr10 en stadalone et souhaite revendre son boitier , je prend !!!
-
cool merci @fran6p plus qu'a en trouver une maintenant
-
merci a vous deux je n'ai plus qu'a mettre une petite annonce pour en trouver une