bracame
-
Compteur de contenus
160 -
Inscrit(e) le
-
Dernière visite
Tout ce qui a été posté par bracame
-

[Dev] AlfaWise U20x-U30 : Marlin 2.x (firmware alternatif)
bracame en réponse au topic de CacaoTor dans Alfawise / Longer3D
Bonsoir, Je ne sais pas car je "vois" bien la SD dans Repetier host et je peux effacer les fichiers, seule l'écriture ne fonctionne pas. Bon si on peut pas transférer 1 Mo sans soucis c'est pas la peine de s'embéter. Encore merci à tous pour ce firmware et passez de bonnes fêtes. -
[Dev] AlfaWise U20x-U30 : Marlin 2.x (firmware alternatif)
bracame en réponse au topic de CacaoTor dans Alfawise / Longer3D
Merci Pommeverte, je pensais qu'à 250 000 Bauds cela devenais acceptable. N'empéche que même avec un fichier ou l'on trouve que "M30" ça marche pas. Bon je vais mettre une rallonge "Port SD card" en espérant que le firmware l'accepte (PB de vitesse du SPI dédié sûrement) . -
[Dev] AlfaWise U20x-U30 : Marlin 2.x (firmware alternatif)
bracame en réponse au topic de CacaoTor dans Alfawise / Longer3D
Bonsoir, Je remet en route mon atelier et donc ma U30 Marlin "flashed inside" avec maintenant un PC à coté. Pour profiter du PC j'ai installé repetier host et cela communique bien mais : J'aimerai pouvoir envoyer un fichier gcode sur la SD de l'imprimante mais ça marche pas . La lecture de l'arborescence et l'effacement fonctionnent impec. Les logs ne m'aident pas à comprendre et ce n'est pas le PC que j'utilise sur le Net donc pas facile de mettre des copies d'écran. Donc, question : Est-ce que le Marlin à la sauce de ce forum et de ce sujet en est capable ? (J'ai un firmware "pommeverte ©" donc pas n'importe quoi hein ). Merci et bonne fin d'année. OUPS ! Je pense que c'est pas le bon endroit pour ce type de question DSL... -
Galére avec grbl sur ATMEGA2560
bracame en réponse au topic de lerouben dans Discussions sur les graveurs laser, les CNC et l'usinage
Bonsoir, Que GRBL envoie sans cesse son état est normal -> Cela permet au logiciel qui le pilote de l'afficher cet état (position, alarmes, etc ....) Pour le problème de switchs, quelle carte utilise tu ? Je me sert de GRBL depuis quelques temps avec un Mega2560 et une config perso sans soucis (Avec un câblage direct). Christophe -
Plateau qui ne chauffe plus U30
bracame en réponse au topic de P'tit ZiGouiGoui dans Alfawise / Longer3D
Pfff, j'avais pas regardé si le "problème" avait déménagé de fil de discussion ... Bon, c'est réparé ça c'est bien ... Et je ferai attention maintenant pour éviter de passer pour une nouille . Bonne continuation itou @PPAC. -
Plateau qui ne chauffe plus U30
bracame en réponse au topic de P'tit ZiGouiGoui dans Alfawise / Longer3D
Salut, Je viens de voir ton message, Tu parle de mesure de courant : Les mesures citées plus haut sont des mesures de résistance (en ohms) avec le bed débranché . Effectivement, la prise a l'air cramée, tu es bon pour souder les fils directement sur le PCB (a moins de racheter ce type de prises et les changer ....) Mesurer d'abord si "le jus" sort encore lorsque l'on demande une chauffe car si il y a rien, le fusible voir pire : Le Mosfet et/sont HS. Pour finir, si tu confond courant et résistance, trouve quelqu'un qui maîtrise un minimum l'électricité pour t'aider (Ceci sans ans aucune moquerie de ma part mais il est facile de faire de grosses bêtises quand on connais pas). Christophe -
Calculer la ou les alimentations pour cnc diy
bracame en réponse au topic de sweex59 dans Entraide : Questions/Réponses sur les CNC et Lasers
A un sur racine de deux . Regarde les docs sur tes drivers car s'ils ne fonctionnent pas en bipolaire microstepping, ce que je dis est sans objet pour ton projet. Le "0.7" en image : (Au croisement des sinusoïdes) -
Calculer la ou les alimentations pour cnc diy
bracame en réponse au topic de sweex59 dans Entraide : Questions/Réponses sur les CNC et Lasers
Bonjour, Avec 24V la vitesse max sera plus faible car le courant mettra plus de temps à s'établir. Et avec 4 A tu atteins même pas les 100W donc insuffisant pour alimenter tout le monde à 6A. En baissant le courant sur les divers (qui le régulent) : Ça fonctionnera .... Reprend mon calcul et vois quel courant max tu pourra paramétrer. -
Calculer la ou les alimentations pour cnc diy
bracame en réponse au topic de sweex59 dans Entraide : Questions/Réponses sur les CNC et Lasers
Bonsoir, Je connais pas les drivers leadshine mais les moteurs PaP oui : "6A en 48V" -> Non non, abus de langage de la part du vendeur car la résistance de chaque bobine est de 0.4 ohms d’après le datasheet ici. Depuis tout petit, j'ai appris U = R X I -> 48 = 6 X 0.4 ?? Tient, c'est nouveau ça . Pour essayer de faire court : (désolé, je suis du genre précis) Chaque phase de ces moteurs est capable "d'encaisser" 6 A ce qui induit une tension de (R X I) 0.4 X 6 = 2.4V. La puissance (P = U X I) = 2.4 X 6 = 14.4 W .... Toujours par phase bien sur. L'inductance du bobinage de 1.5 milli Henry fait que l'impédance (disons la résistance pour simplifier) augmente fonction de la fréquence des impulsions. -> Raison pour laquelle le couple diminue quand la fréquence augmente car le courant en fait de même. Et c'est pour éviter cette chute que l'on alimente ce type de moteur avec une tension bien plus grande que celle requise : Le courant nominal s'établis plus vite malgré l'inductance et c'est au driver de le limiter. Revenons aux 14.4 W par phase : Le nombre de connecteurs est indiqué "4" sur la (pas précise) doc de tes moteurs -> Ce sont donc des moteurs bipolaires (ont alimente dans un sens puis dans l'autre les bobines) donc il faut un driver compatible. En mode bipolaire et en microStepping les deux phases sont alimentées en permanence avec une consommation au maximum de 0.7 X I nominal X 2 (phases). Voir la doc du driver .... Même calcul pour la puissance : 0.7 X 14.4 X 2 = 20.2 W environ. Donc une bonne centaine de Watts pour les 4 moteurs (Ce qui est assez musclé pour une CN perso) Une seule alim pour les 4 moteurs suffit : Pour avoir de la marge et prendre en compte les pertes des drivers, personnellement je partirai sur 200-250 W (Soit dans les 5A en sortie pour du 48V) les drivers "convertirons" et fourniront bien les 6A/2.4V aux moteurs. Bonne construction. Pour info, sur ma fraiseuse (3 axes plus diviseur), mes moteurs absorbent 2.1A par phase et l'alim ne fournis que 2.2 A sous 24V (valeurs mesurées). -
Salut Jean Claude,
Dernièrement, j'ai vu tes contributions aux discutions sur la première version de windows, dos ....
-> Une vidéo : la. (intéressante !!! Je rajeunis

A+
Christophe
-
Tss Tss, tes propos par fois mal t'a propos me manquent pas (Je t'ai MP à ce sujet) .... Mais LE PRO, celui qui aide sans compter son temps tout en montrant son Impatience/Envie que "l'autre" comprenne ces propos : Oui ça ça manque mais dur !! (Chercher Garage Rochar pour ceuse qui "entrave que pouic"). Perso : Plus de temps pour partager mon maigre savoir ici (année de M... ici aussi) mais de retour dès que possible (Priorité à M. @supernono) Christophe
-
Fan de "vrai" litérature je dirai : Re bienvenue Béru signé Sana
-
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Bonjour, et ben ça c'est du joystick !!! Au niveau "bricolage" : C'est du grand art !!! Merci du partage. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Bonsoir, La , tu as envie de t'amuser !! Au niveau utilisateur, c'est sympa mais cela demande pas mal de travail pour ne pas nuire aux performances de GRBL. Je vais (bientôt) faire l’implémentation de la vitesse de broche en plus des avances : On verra. LE plus simple et le mieux. Bon week end. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Oui : "Animal"-> Il transpire la joie à taper sur ses caisses ! Merci !!! j'adore. Je vais regarder ton cas dans le détail mais il va me falloir peut être un peut de temps (car je vais tester avant) ... La reprise des activités pro va être dure ....et longue !!!!! De quoi faire un film X ;-). -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Ok, Si tu es patient, je regarderais.... Hoaouuu !!!!!! Super ton nouvel Avatar : J'aaaadooore la "bête" : LE batteur du MuppetShow !!!!! CCCooooooooooooollllllllllll !!! Je suis un gamin ... D'un demi siècle .... -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Reprenons au début si tu veux bien : Quelles pins pour quel potar ? Si tu en a qu'une de dispo : Cela ne peut pas fonctionner. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Ha ! dommage... Pour être sur : Tu utilise bien PF1 et PF5 ? Si oui, t’embête pas avec les autres. Et pour ce qui est du "else" modifié, je comprend pas bien le pourquoi mais essaye en laissant le code tel que "livré" de placer un "return;" après le "PingPong = true;" STP. PingPong = true; return; } else // Read spindle pot and start feddrate pot conversion { La, on sera sur que l'on sort de la fonction. On va l'avoir .... Si besoin je testerai ici. Avec ma Kress, la variation de vitesse de broche : Je le fait directement dessus car c'est pas pilotable facilement à distance. Donc j'ai pas implémenté cette fonction mais il est sur qu'elle est "nécessaire" quand elle est possible. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Bonjour, Si tes entrées sont bien sur AIN1 et AIN5 (sur le même port) , cela devrait donner un truc du genre : #include "grbl.h" #define ADC_VREF_TYPE (1 << REFS0) // AVCC (5V) with external capacitor at AREF pin void InitMultiPot() { FEED_RATE_POT_DDR &= ~(FEED_RATE_POT_PIN); // Configure as input pin FEED_RATE_POT_PORT &= ~(FEED_RATE_POT_PIN); // Configure no pullup SPINDLE_POT_DDR &= ~(SPINDLE_POT_PIN); // Configure as input pin SPINDLE_POT_PORT &= ~(SPINDLE_POT_PIN); // Configure no pullup ADMUX = ADC_VREF_TYPE | FEED_RATE_POT_NUM; // 5V reference + Feed Rate input selected ADCSRA = bit(ADEN) | bit(ADPS2) | bit(ADPS1) | bit(ADPS0); // ADC enabled, pre-scaler division=128. ADCSRB = 0; // AIN0 to AIN7 ADCSRA |= (1 << ADSC); // Start first AD conversion } void UpdateMultiPotValue() { static uint8_t feedratePotValueMem; static uint8_t spindlePotValueMem; uint8_t PingPong = false; if (PingPong == false) // Read feedrate pot and start spindle pot conversion { if (bit_is_clear(ADCSRA,ADSC)) // If the AD conversion is complete { uint8_t feedratePotValue = ADC>>2; // Update value/4 -> (0 - 255) if (feedratePotValue < MIN_FEED_RATE_OVERRIDE) {feedratePotValue = 100;} if (feedratePotValueMem != feedratePotValue) { feedratePotValueMem = feedratePotValue; sys.f_override = feedratePotValue; // Rapid must don't exced DEFAULT_RAPID_OVERRIDE if (feedratePotValue > DEFAULT_RAPID_OVERRIDE) {feedratePotValue = DEFAULT_RAPID_OVERRIDE;} sys.r_override = feedratePotValue; sys.report_ovr_counter = 0; // Set to report change immediately plan_update_velocity_profile_parameters(); plan_cycle_reinitialize(); } } ADMUX = ADC_VREF_TYPE | SPINDLE_POT_NUM; // 5V reference + Spindle input selected ADCSRA |= (1 << ADSC); // Start AD conversion PingPong = true; } else // Read spindle pot and start feddrate pot conversion { if (bit_is_clear(ADCSRA,ADSC)) // If the AD conversion is complete { uint8_t spindlePotValue = ADC>>2; // Update value/4 -> (0 - 255) if (spindlePotValue < MIN_SPINDLE_SPEED_OVERRIDE) {spindlePotValue = 100;} if (spindlePotValueMem != spindlePotValue) { spindlePotValueMem = spindlePotValue; sys.spindle_speed_ovr = spindlePotValue; sys.report_ovr_counter = 0; // Set to report change immediately } } ADMUX = ADC_VREF_TYPE | FEED_RATE_POT_NUM; // 5V reference + Spindle input selected ADCSRA |= (1 << ADSC); // Start AD conversion PingPong = false; } } Quand PingPong est à 0 : On lis le feedrate et on lance la conversion pour la broche et quand il est à 1 on lis la broche et on lance la conversion feedrate... J'ai pas testé : Il y a peut être une ou deux "coquilles". Edit : SPINDLE_POT_NUM et FEED_RATE_POT_NUM définissent le numéro de pin (1 et 5 dans ton cas ... Je crois -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Bonjour @supernono, Bonne idée de faire varier la broche aussi ;-). Je vais te mettre sur la voie : ADMUX permet (entre autre) de sélectionner sur quelle entrée ana on va faire la conversion. Le résultat de cette conversion sera toujours retournée par le registre ADC (Que je divise par 4 pour obtenir une variation 0 - 254 %). Donc pour ne pas ralentir le code, définis une variable uint8_t PingPong = false ; par exemple et sert t'en pour faire la conversion sur AIN5 -Ping- (avances) puis au cycle suivant sur AIN1 -Pong- (broche) en redéfinissant ADMUX à chaque fois .... Espérant être à peut près clair .... Le mieux serait donc de gérer les deux dans le même fichier pour éviter les doublons (erreurs) lors de l'init. Cela simplifiera la lecture du code aussi. Si tu y arrive pas, je te le ferai ... Plus tard. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Oui, sur les cartes "fiables" 100nF sont placées sur Aref. Tu connais ton affaire .... Bravo. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
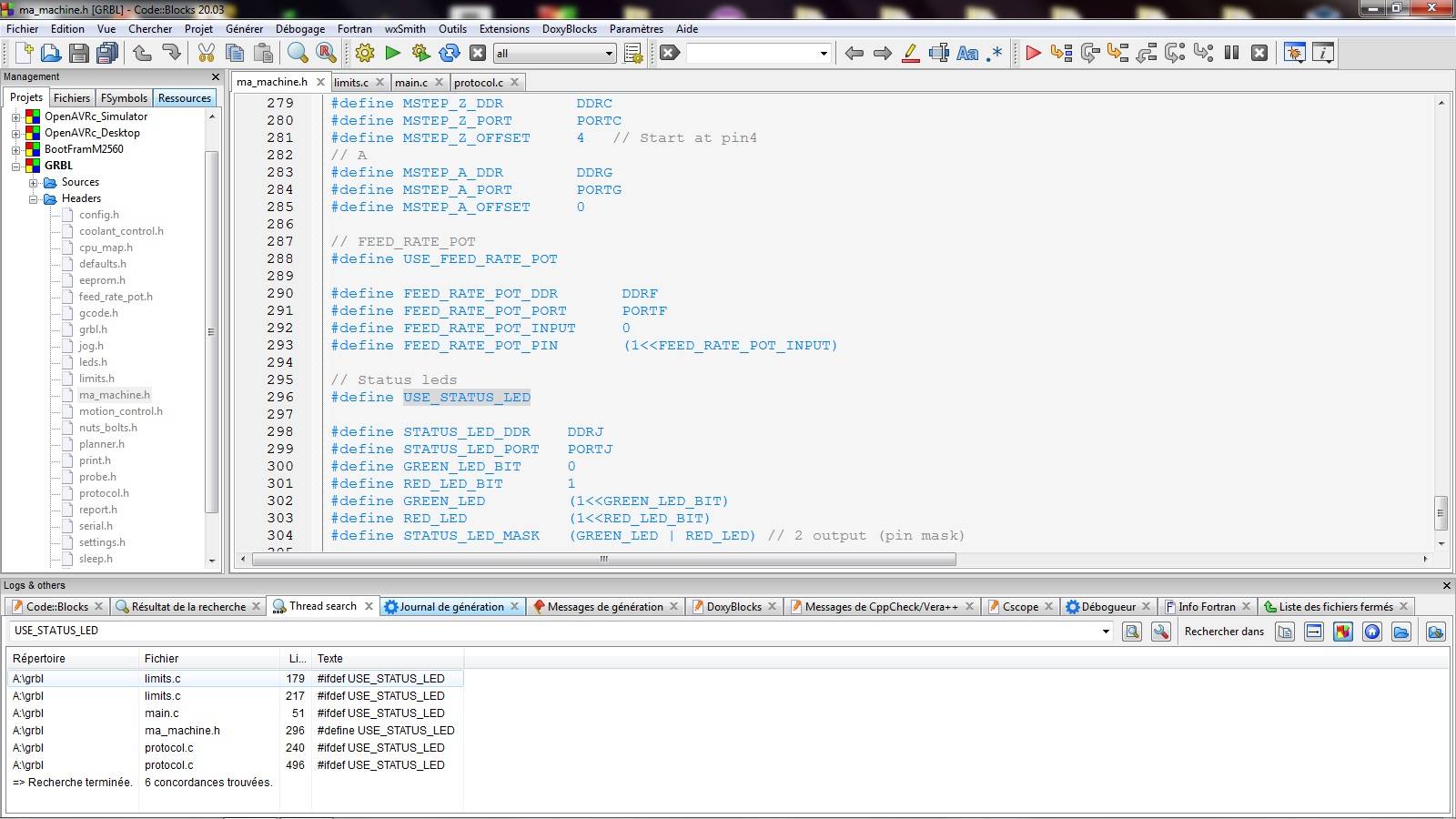
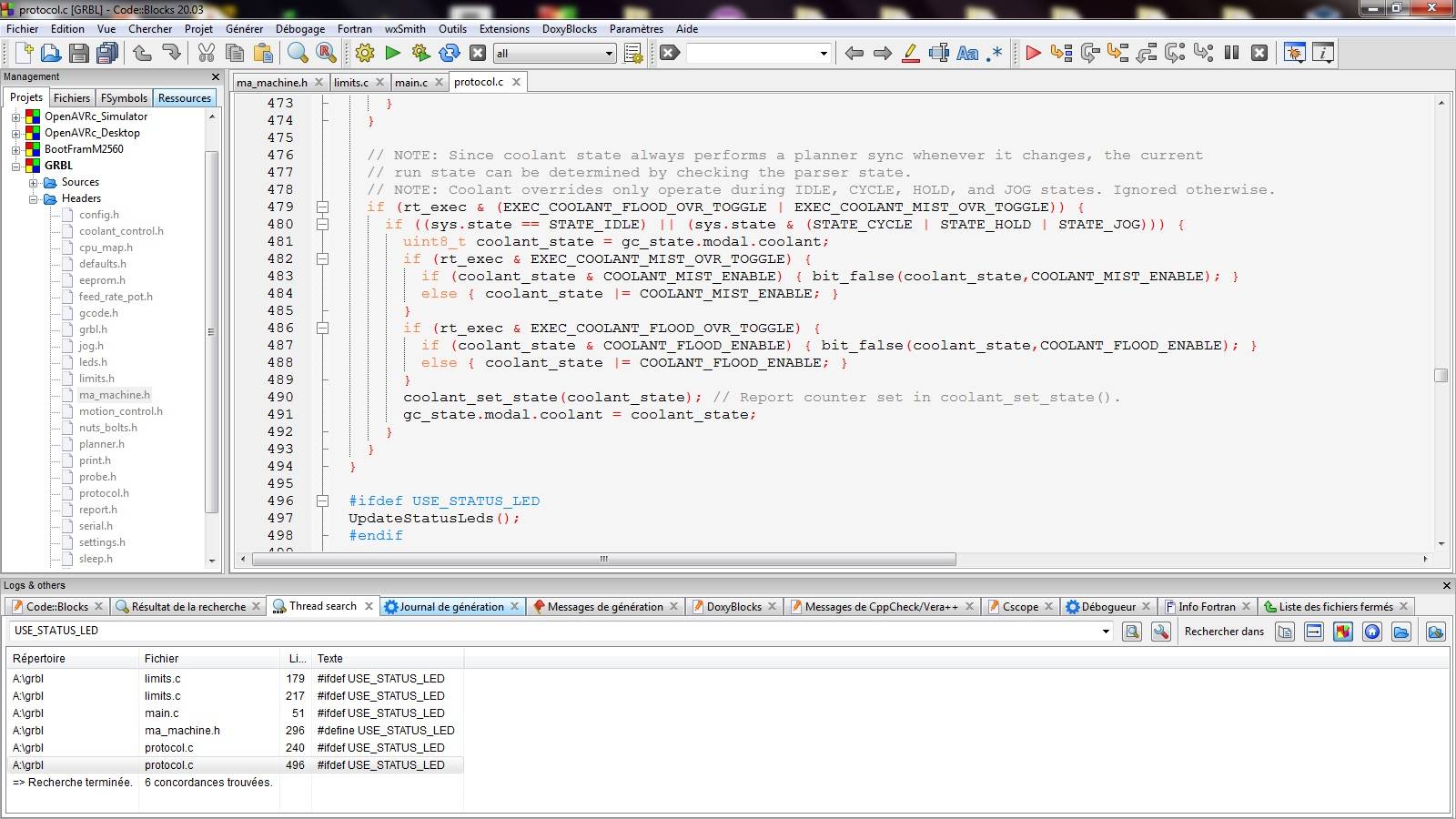
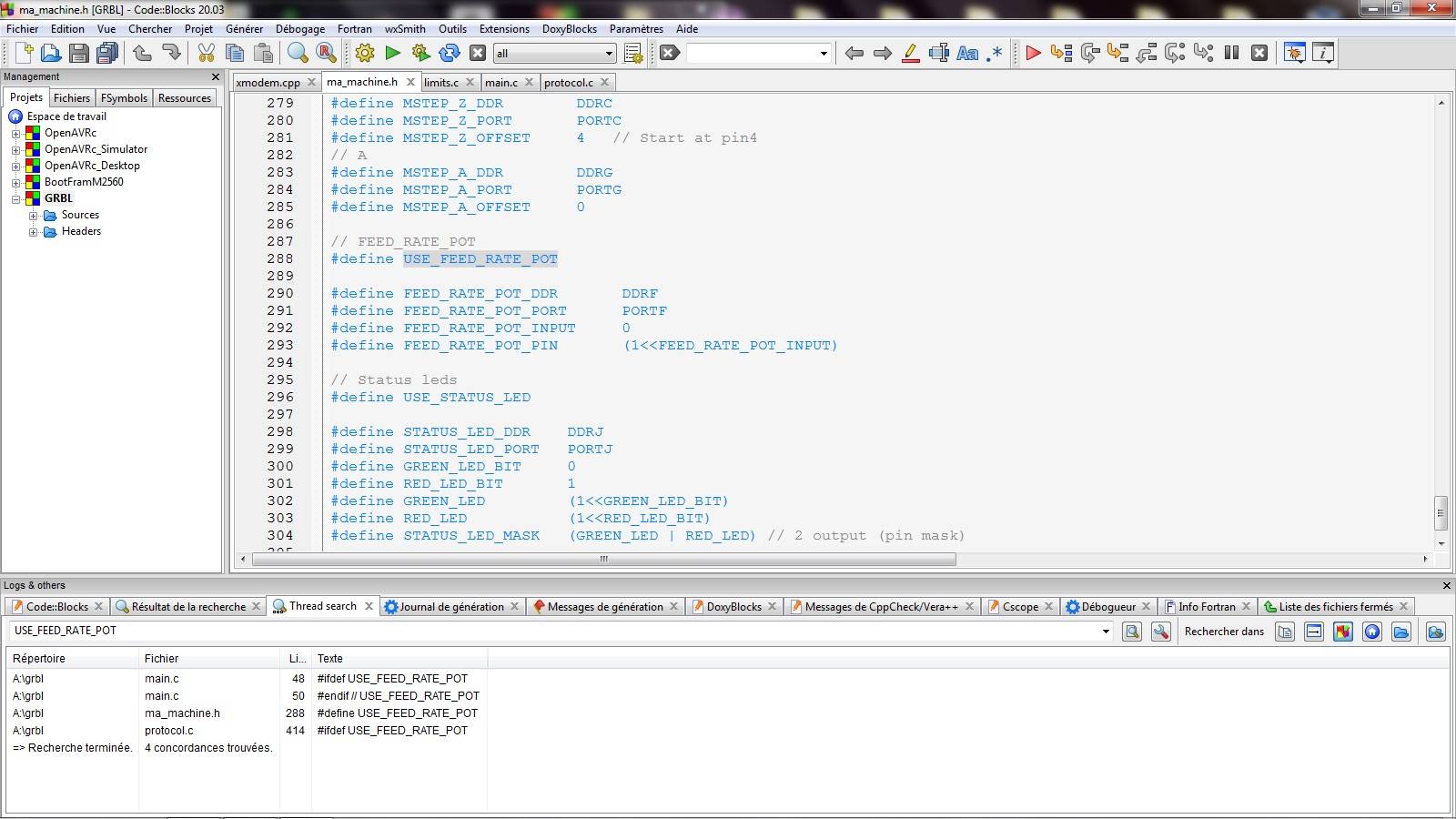
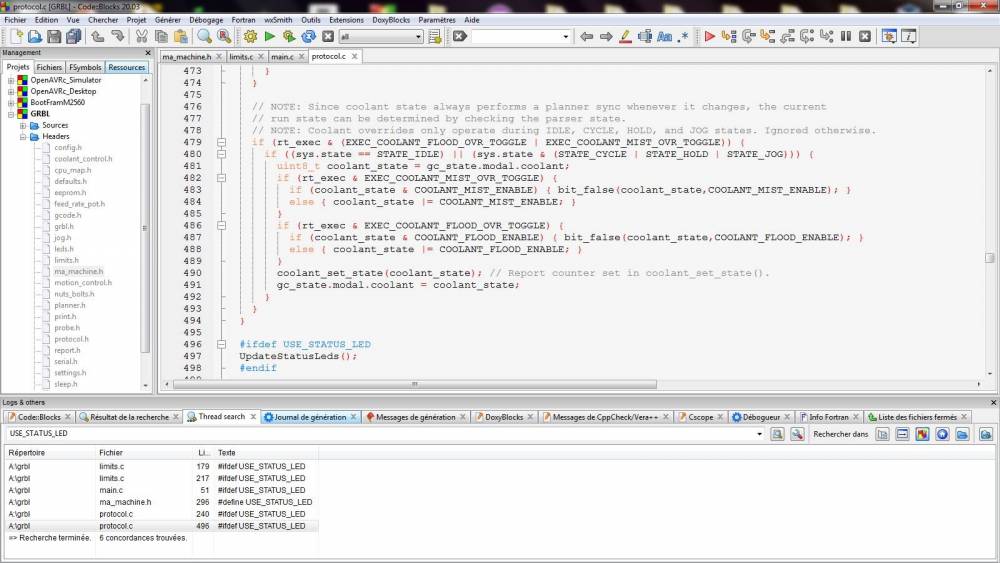
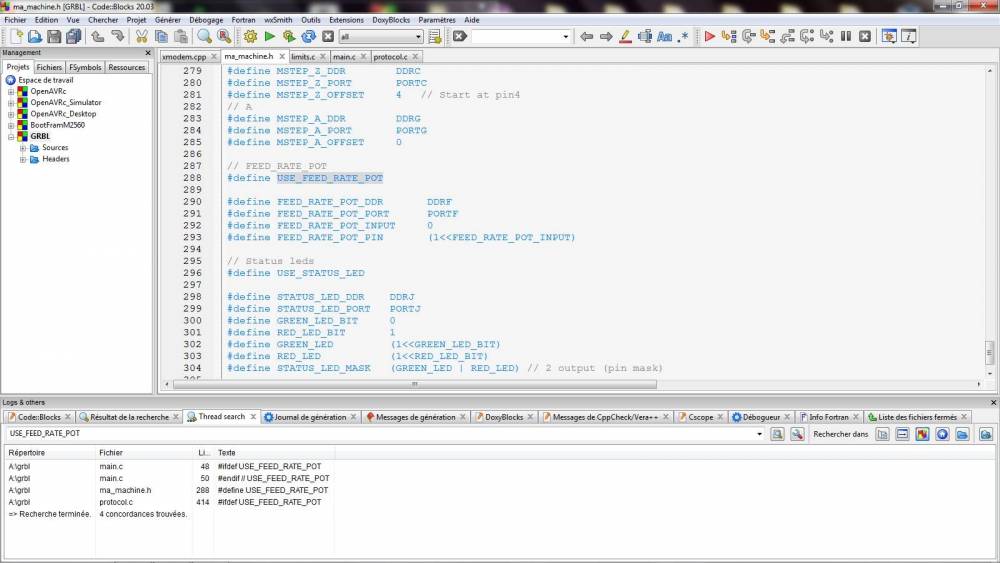
Voici des copies d'écran pour comparer ou j'ai placé mes modifs ! (Il y en a une en trop, mais j'arrive pas à faire le ménage .. Dsl La led : Le potar : Cela devrait aider ;-)/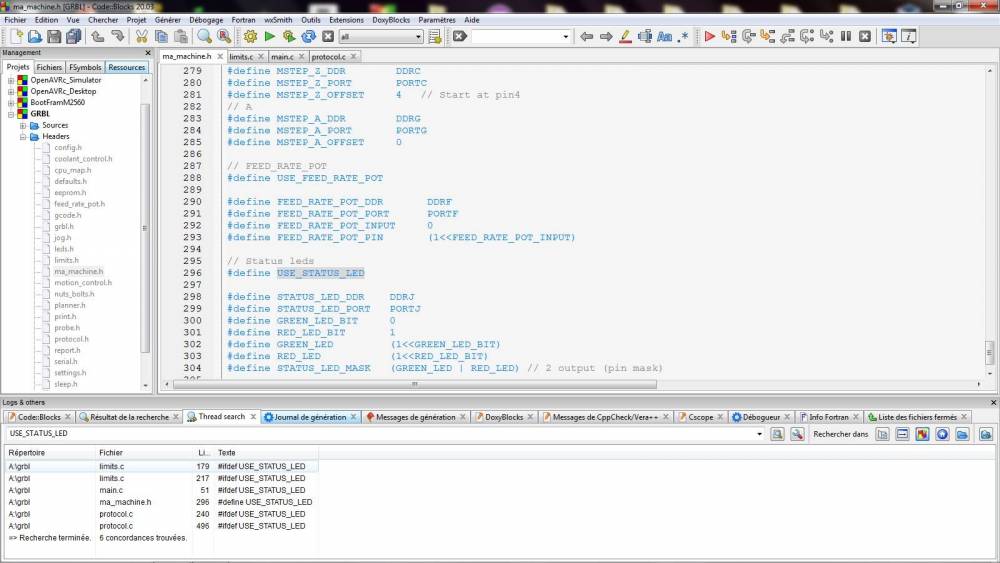
-
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Et bien mon potar est une récup aussi... tu peux placer un condo 10 à 100 nF entre la masse et le point de mesure.. Et oui ; C'est une modif "indispensable" pour moi : Gérer l'avance est le principal boulot d'une fraiseur. La : Ont peut le faire. -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Peut être que la définition de STATE_CYCLE et de se copains ont été modifiés pas Gauthier (L’auteur du firmware que tu utilise). A demander à l'auteur .... (Il est pas sur ce Forum ?) -
Rétrofit d'une fraiseuse 4 axes de 2006
bracame en réponse au topic de bracame dans Discussions sur les graveurs laser, les CNC et l'usinage
Pour Aref, c'est OK. Le pourcentage, tu le vois sur le logiciel qui pilote GRBL. Pour le "Home" tu as dut oublier un truc -> Je vais vérifier